基于Simulink的火炮伺服系统自抗扰控制仿真
- 格式:doc
- 大小:15.50 KB
- 文档页数:3

实验八 基于Simulink 的伺服系统仿真一. 实验目的1) 熟悉Simulink 的工作环境及其SimPowerSystems 功能模块库;2) 掌握Simulink 的电力电子电路系统建模和仿真方法;3) 掌握Simulink 下数学模型的仿真方法;4)掌握PID 控制对系统输出特性的影响。
二.实验内容直流电机单闭环调速系统组成如图8.1所示。
图8.1中,r 为给定输入量,y 为系统速度输出量,e 为系统偏差控制量。
控制器选用PI 调节控制方式,功率放大器选用PWM 功率放大器,电机选用他励直流电机。
系统参数见表8-1。
给定速度100 /r rad s =,负载由空载到1s 时跳变到20N 。
调节不同的PI 控制器参数,观测电机速度波形、转矩波形的变化规律。
PI 控制器参数取值为a) Ki=100, Kp=5; b) Ki=2, Kp=1。
控制器功率放大器伺服电机r ye +-图8.1 直流电机单闭环调速系统组成三.实验步骤1. 建立电路仿真系统在Simulink仿真环境中打开Simulink库,找出相应的单元部件模型,构造图所示的仿真模型。
其中用到了直流电机模块。
直流电机模块有1个输入端子、1个输出端子和4个电气连接端子。
电气连接端子与直流电机励磁绕组相连。
A+和A-与电机电枢绕组相连。
输入端子是电机负载转矩的输入端。
输入端子(m)输出一系列的电机内部信号,由4路信号组成。
通过“信号数据流模块库”中的“信号分离”模块,即Demux模块可以将输出端子m 中的各路信号分离出来。
经过整流桥变换向电机提供直流电压。
经励磁回路,输出PWM波形。
同时,电机的转速作为反馈信号反馈到输入端。
对于三相电压源,选择频率为50Hz,幅值为2203。
按图连接好线路,设置参数,建立其仿真模型,并对各个单元部件模型的参数进行修改,如图所示。
2.进行仿真波形输出示波器的输出波形如下,依次为电机转速,电枢电流,场电流,电磁转矩(1)Ki=100, Kp=5(2)Ki=2, Kp=1四、实验结论由上图可见,此系统为脉冲比较系统,仿真模型中利用负反馈,经PI 控制输出误差给脉波发生端。
信实101专业10级《计算机仿真与MATLAB》课程报告题目:基于matlab仿真的火箭推进系统抗干扰能力最优化系统参数的研究班级:信实101姓名:学号:2012年12 月基于MATLAB/SIMULINK 的火箭最优化抗干扰系统的设计与分析摘要: 在火箭在发射过程中会受到干扰信号的作用而偏离轨道,故需设计出抗干扰系统来尽量减少飞行器飞行的过程中扰动因素的影响,提高系统性能,使火箭的角度通过控制系统来跟踪参考角度。
通过取不同的比例微分环节的K 值对系统进行无扰动信号的、扰动信号单独作用、扰动信号与正弦信号叠加时进行输出测试,得到与原信号拟合度最强的的K 值。
1.1 决定火箭推进系统抗干扰能力的系统参数——控制对象建模For personal use only in study and research; not for commercial use(1)被控对象的数学模型火箭推力及方向关系如图(1)所示,这里()t θ为火箭的方向与速度的夹角,()t ϕ表示火箭推进器的角度,()w t 表示加在火箭上的干扰风力。
控制器设计的目标是使火箭的角度跟踪参考角度()r t θ。
发动机可以直接控制推进器的角度并对推进器定位。
系统模型可用下面等式来表示:For personal use only in study and research; not for commercial use()()10.5()()()11s s W s s s s s Θ=Φ+--火箭推进器示意图(2)控制系统的数学模型0.5()c G s ()11s s -+-()W s ()s Φ()s Θ()r s Θ()(2)c G s K s =+控制系统的原理框图,其中()W s 为扰动信号,()1r t θ=为输入信号。
1.2 火箭最优化抗干扰推进系统原理分析 (负反馈的作用)?采用负反馈控制器,从火箭推进系统的数学模型可以看到,当有扰动信号()W s的作用时,系统通过负反馈环节1.3 火箭最优化抗干扰推进系统MATLAB仿真分析(1)MATLAB程序设计,或Simulink模型,或二者的结合(2)仿真参数的设置,思考仿真参数的影响等(3)系统特性分析,例如开环系统的时域/频域分析,加入控制器后系统的时域/频域分析等,应有仿真结果,如图、表、结果数据等。
基于SIMULINK的高炮随动系统仿真研究安树;陈永利【期刊名称】《测试技术学报》【年(卷),期】2010(024)006【摘要】高炮随动系统是整个高炮武器系统的核心部分, 随动系统性能的优劣将直接影响防空武器系统的整体作战效果. 为提高自行高炮武器系统的综合保障能力, 使武器系统形成最佳战斗力, 必须使随动系统性能参数满足高可靠性、高速度、高加速度等性能指标的要求. 因此研究高炮随动系统参数的选取、参数变化对系统性能的影响是非常重要的. 本文以某型高炮为例, 在分析该高炮随动系统的工作原理和控制规律的基础上, 采用 MATLAB 的动态仿真平台 SIMULINK 建立了高炮随动系统的动态模型, 并对其进行了实时仿真和分析, 从而得到了控制器的最佳参数选择. 仿真结果验证了该系统满足所给定的动静态特性的要求, 既可以指导实际系统中参数的调整, 又可以为新型火炮随动系统的设计提供可靠的参考依据.【总页数】5页(P507-511)【作者】安树;陈永利【作者单位】军械工程学院,电气工程系,河北,石家庄,050003;军械工程学院,电气工程系,河北,石家庄,050003【正文语种】中文【中图分类】TP391【相关文献】1.基于MATLAB/SIMULINK 的某型高炮伺服系统的仿真研究 [J], 齐晓慧2.基于SVPWM控制技术的高炮随动系统仿真 [J], 韦宏强;阚虎;吴红权;张鹏;郑屹;樊蓉3.基于AMESim的高炮炮闩润滑控制系统仿真研究 [J], 李献锋;房立清4.基于s函数的PMSM随动系统仿真研究 [J], 颜炳弘; 胡宏; 杜宝珠; 张捷5.基于MATLAB and Simulink的波浪能装置液压能量转换系统仿真研究 [J], 叶寅;盛松伟;乐婉贞;王坤林;张亚群因版权原因,仅展示原文概要,查看原文内容请购买。

自抗扰控制器在位置伺服系统中的参数整定及仿真郑伟;董文妍;张焕鑫;段然;邓钊【期刊名称】《计算机测量与控制》【年(卷),期】2015(23)10【摘要】针对自抗扰控制器整定困难的问题开展研究;基于MATLAB/Simulink软件设计了自抗扰控制器,结合永磁同步电机控制系统各模块结构,实现了位置伺服系统的闭环仿真,利用仿真输出及时间、参数值绘制三维图象,通过对图象的分析验证了参数整定的新方法,实现了自抗扰控制器的参数整定;最后,通过对比自抗扰和PI 控制器在恒值、正弦、斜坡等给定输入下的跟踪效果,得出自抗扰控制器的控制效果优于PI控制器的结论.【总页数】4页(P3364-3366,3369)【作者】郑伟;董文妍;张焕鑫;段然;邓钊【作者单位】北京航天自动控制研究所宇航智能控制技术国家重点实验室,北京100854;北京机电工程研究所,北京 100074;北京航天自动控制研究所宇航智能控制技术国家重点实验室,北京100854;北京航天自动控制研究所宇航智能控制技术国家重点实验室,北京100854;北京航天自动控制研究所宇航智能控制技术国家重点实验室,北京100854【正文语种】中文【中图分类】P391【相关文献】1.用MATLAB仿真分析自抗扰控制器的整定参数 [J], 张晓东;童少为2.用MATLAB仿真分析自抗扰控制器的整定参数 [J], 张晓东;童少为3.改进遗传算法整定自抗扰控制器参数及应用 [J], 孙雨萌; 张旭秀4.基于模拟退火智能算法的自抗扰控制器参数整定及仿真 [J], 陈智华;耿修堂;肖建华;张勋才;甘作新5.PMSM伺服系统线性自抗扰控制器的参数整定 [J], 许文波;魏泽宇;孔伟;潘龙;刘伟奇因版权原因,仅展示原文概要,查看原文内容请购买。
基于Simulink的舰船主炮半主动控制隔振系统仿真与分析随着舰船的发展和需求的提高,对主炮精度的要求也越来越高。
然而,舰船在海上航行时会受到各种因素的干扰,如波浪、风力、船体震动等,这些因素都会影响到炮弹的精度和命中率。
为了解决这一问题,本文将采用半主动控制隔振系统对舰船主炮进行控制和隔振,从而提高炮弹的精度和稳定性。
一、隔振系统原理及模型构建半主动控制隔振系统是一种利用主动调节和半主动调节的方式,对机械振动进行控制和隔离的系统。
其基本原理是通过安装振动控制装置,对机械振动进行扭转、耦合、转化、滤波等处理,从而实现对振动的衰减或消除,以达到降低噪声、减少震动、提高精度等目的。
在本文中,我们采用的是半主动控制隔振系统。
半主动控制隔振系统的组成包括振动源、振动控制器、执行机构和传感器。
其中,振动源表示机械振动的产生来源,比如舰船主炮的后座力;振动控制器是振动控制系统的核心,通过预测和补偿机械振动,实现振动的控制和隔离;执行机构则是将振动控制器的输出信号转化为实际对机械振动进行控制的机构;传感器则是通过感知机械振动的变化,将信号送给振动控制器进行处理。
在系统模型的构建中,我们采用了Simulink仿真工具,利用其优良的建模和仿真能力,实现了舰船主炮半主动控制隔振系统的建模与仿真。
具体来说,我们采用Simulink中的Simscape模块,创建了基于Simulink的半主动控制隔振系统,其中包括了机械振动源、振动控制器、执行机构和传感器等,构建出了基本的系统框图,从中可以看出机械振动源产生机械振动,通过振动传感器将振动信号传输到振动控制器中进行处理。
振动控制器根据传感器反馈的振动信息,对振动源提出控制要求,执行机构则根据振动控制器提出的要求,实现对机械振动的控制和隔离。
在整个系统中,通过控制器对机械振动进行预测和补偿,实现了振动的控制和隔离,并使得隔离后的振动程度达到比较理想的水平。
二、系统仿真与分析在模型构建完成后,我们对系统进行了一系列的仿真和分析。
2007年8月第35卷第8期机床与液压M A C H I N ET O O LSH Y D R A U L I C SA ug.2007V o i.35N o.8基于Si m ui i nk仿真平台上的随机干扰液压自适应控制系统*吴振顺!肖原"哈尔滨工业大学机电工程学院!哈尔滨150001#摘要!基于Si m ui i nk仿真平台给出适合应用于液压系统的自适应控制策略O为简化控制算法在设计自适应控制器时只考虑控制输入作用忽略随机干扰的作用从而极大地简化了自适应控制器有利于在线实时控制O通过大量的仿真研究说明用这种简化的控制策略能有效地控制包含随机干扰作用下的整个液压控制系统它不仅能使一个不稳定的系统变为稳定且能在随机干扰作用下也能渐近一致地跟随参考模型的希望输出使被控系统满足性能指标要求O 关键词!Si m ui i nk仿真平台S液压控制系统S自适应控制S随机干扰中图分类号!T P271.3 文献标识码!A文章编号!1001-3881"2007#8-104-3R e s e ar c hab ou t s e l f-ad ap t i ve c on t r ol l e r an da p p l i c at i onont h eH yd r au l i c s ys t e m u n d e r t h e a c t i onof R an d om D i s t u r b an c eW Uz he ns hun X I A OY ua n0H a r bi n I ns t i t ut e o f T e c hno i o g y H a r bi n150001C hi na0a b s t r ac t1B a s e d o n Si m ui i nk s i m ui a t i o n pi a t f o r m s ui t a bi e s e i f-a da pt i v e c o nt r o i m e t ho d a ppi i e d i n hy dr a ui i c s y s t e mw a s g i v e n.T o s i m pi i f y c o nt r o i a i g o r i t hm o ni y t he a c t i o n o f c o nt r o i i nput w a s c o ns i de r e d a nd t he a c t i o n o f r a ndo mdi s t ur ba nc e w a s no t t a ke n i nt o a c-c o unt w he n s e i f-a da pt i v e c o nt r o i i e r w a s de s i g ne d.T he r e f o r e s e i f-a da pt i v e c o nt r o i w a s s i m pi i f i e d a nd f a v o r a bi e t o do r e a i-t i m e c o nt r o i o ni i ne.A c c o r di ng t o t he s i m ui a t i o n r e s e a r c h i t i s s ho w n t ha t t he s i m pi i f i e d c o nt r o i m e t ho d c a n c o nt r o i t he w ho i e hy dr a ui i c c o nt r o i s y s-t e mi nc i udi ng t he a c t i o n o f r a ndo mdi s t ur ba nc e i t c a n c o nv e r t uns t a bi e s y s t e mi nt o s t a bi e s y s t e m a nd c a n g r a dua i i y a nd c o ns i s t e nt i y f o i i o wt he e x pe c t e d o ut put o f r e f e r e nc e m o de i t o m a ke c o nt r o i i e d s y s t e mt o be c o nt e nt w i t h t he r e gui r e m e nt s o f pe r f o r m a nc e i nde x unde r t he a c t i o n o f r a ndo mdi s t ur ba nc e.K e yw or d s1Si m ui i nk s i m ui a t i o n pi a t f o r m S H y dr a ui i c c o nt r o i s y s t e m S Se i f-a da pt i v e c o nt r o i S R a ndo mdi s t ur ba nc e0 前言由于液压控制系统有其本身的特有特性系统的特征参数例如液压固有频率\液压阻尼比\液压刚度等随外界干扰\外界环境及负载工况的变化将要发生很大的变化有时还带有随机性使液压控制系统变为不确定的系统给系统控制带来较大的困难O 因此在高精度\高可靠性要求的情况下仍用常规的反馈控制\P I D控制这种不确定系统等将很难获得预期的效果O为解决这个问题针对具有随机干扰作用下的液压控制系统应用基于误差方程多项式代数法给出适合应用于液压控制系统的自适应控制策略构成自适应控制系统O为简化自适应控制算法考虑到液压控制系统的控制输入u0t0为主导控制作用即在自适应控制系统的设计时只考虑控制输入u0t0的作用忽略了干扰F0t0的干扰作用从而使自适应控制算法得以极大的简化有利于在线实时控制O需要说明的是按此思想得到的简化自适应控制器其控制对象仍为包括随机干扰作用下的整个液压控制系统O并在Si m ui i nk仿真平台上完成该自适应控制系统的仿真研究O1 液压控制系统模型及参考模型根据典型的液压控制系统考虑到液压固有频图1 液压控制系统方块图率\液压阻尼比对整个控制系统的动态特性起着决定性的作用可将系统简化成如下在外界干扰作用下的三阶系统O其方块图如图1所示O根据系统方块图1可得输出传递函数为y0s0=KUc2hu0s0-Kc eA201+Vt4BeKc es0c2hF0s0s3+2Zhchs2+c2hs+KUc2h010假设液压控制系统干扰F0s0为随机干扰O根据线性系统的叠加原理可以将系统输出y0t0看成由系统控制输入u0t0作用下的输出yu0t0减去随机干扰F0t0作用下的输出yf0t0构成即y0t0=yu0t0-yf0t0020根据系统控制性能要求选择满足系统性能要求的模型作为自适应控制系统的参考模型O这里选择参考模型为ym0s0um0s0=Kmc2mcrs3+02Zmcm+cr0s2+0c2m+2Zmcmcr0s+crc2m030*基金项目!黑龙江省自然科学基金资助项目它是由放大环节~惯性环节及二阶振荡环节构成O 将系统参数代入上述传递函数中,可在Si m ui i nk 仿真平台上分别作出液压控制系统及参考模型的仿真模型如图2所示O图2 Si m ui i nk 仿真模型图3 随机干扰力F O t O图3为随机干扰仿真曲线,图4O a O 为液压控制系统在随机干扰作用下原系统的时域特性曲线,图4O b O 为参考模型时域特性曲线O 由图4可知,液压控制系统不稳定O 而参考模型的动态特性较好,特性曲线较为理想,过渡过程平稳且无超调,满足系统性能指标要求,可以作为自适应控制系统的参考模型O图4 时域特性仿真曲线2 液压自适应控制系统的构成为了在Si m ui i nk 仿真平台上实现自适应控制,将图2重新构成如图5所示形式的仿真模型O设自适应控制误差e m O t O =y O t O -y m O tO O 4O 为简化自适应控制算法,考虑到液压控制系统的控制输入u O t O 为主导控制作用,即在进行自适应控制系统的设计时,只考虑控制输入u O tO 的作用,需要说明的是,按此思想得到的简化自适应控制器其控制对象仍为包括随机干扰作用下的整个液压控制系统O 也就是说,这里用简化的控制器控制复杂的液压原系统O 此时由液压系统的传递函数式O 1O 可知,其分子多项式的阶数m =0,分母多项式的阶数n =3,图5 Si m ui i nk 仿真模型根据自适应控制理论,选择m 阶稳定多项式H O p O =1O 式中p 为微分算子O,n -m -1稳定多项式D O p O =p 2+2Z m c m p+c 2m 使H O p O D O p O A m O p O =G O p OA m O pO 为严格正实O设广义误差为e d O t O =D O p O e m O t O = y u O t O - y m O t O +2Z m c m I ~y u O t O -~y m O t O1+c 2m I y u O t O -y m O t O1O 5O 取n +m +1个自适应控制滤波信号Z iO t O O i =1,2, ,n +m +1=4O 为Z 1O t O =y u O t O Z 2O t O =~y u O tO Z 3O t O = y u O t O Z 4O t O =u mO t O O 6O则自适应控制系统的参数调节规律为K iO t O =-Y i Z iO t O e dO t O d t O i =1,2,3,4O O 7O被控系统的控制输入u O t O 为u O t O =Z 4i=1K i Z iO t O O i =1,2,3,4O O 8O于是,可作出如图6所示的液压系统在随机干扰作用下自适应控制系统Si m ui i nk 仿真模型,图中取自适应控制增益Y i =1000O i =1,2,3,4OO 3 仿真试验研究为考察基于Si m ui i nk 图型模态构成的在随机干扰作用下,液压自适应控制系统的有效性,取各种信号作为该自适应控制系统的规范输入,经大量仿真研究,其部分仿真结果如图7所示O 图7O a O 其规范输入函数u m O tO =15.0,图7O b O 规范输入函数~501~第8期吴振顺等:基于Si m ui i nk 仿真平台上的随机干扰液压自适应控制系统图6 随机干扰作用下液压自适应控制系统Si m ui i nk 仿真模型u m 0t 0=5s i n5.024t ,图70c 0规范输入函数u m 0t 0=5s i n2.512t -s i n10.048t,图70d 0输入函数u m 0t 0=5s i n10.048t s i n0.628tO 由仿真结果可知,其自适应控制效果良好,它不仅能使一个稳定性较差的液压系统变为稳定,且能在随机干扰作用下,很好地跟踪参考模型的希望输出O图7 自适应控制仿真结果4 结论010由于液压控制系统受其负载 工况及其外界环境变化的影响,其外界干扰将在大范围内发生变化,并带有随机性质,因此在液压自适应控制系统设计时应加以充分考虑O020为简化自适应控制算法,考虑到液压系统刚度大的特点,在自适应控制器的设计时只考虑控制输入u 0t0的作用,而忽略了随机干扰F 0t 0的作用,只取广义误差e d 0t 0=D 0p 0e m 0t 0=D 0p 00y u 0t0-y m 0t00,从而极大地简化了自适应控制器的结构,使自适应控制输入及参数调节规律具有最简形式,有利于在线实时控制O030通过大量的仿真研究,说明自适应控制算法不但简单,且具有很强的自适应控制能力,控制精度高,它不仅能使一个稳定性较差的液压系统变为稳定,且能在激烈的随机干扰作用下,也能很好地跟随参考模型的希望输出O参考文献1 市川邦彦.制御系U 設計理论 M .东京 技术书院,1988.2 金井喜美雄.適应制御入門 M .东京 - 社,1989.3 吴振顺.自适应控制理论与应用 M .哈尔滨工业大学出版社,2005.4 楼顺天,于卫.基于M A T L A B 的系统分析与设计-控制系统 M .西安 西安电子科技大学出版社,1998.5 吴振顺.电液伺服系统的鲁棒自适应控制的研究J .工程机械,1996080.6 吴振顺,等.液压数字自适应控制系统的非最小相位问题及其对策 J .哈尔滨工业大学学报,1996040. 作者简介!吴振顺,男,1949年出生,教授,于1987 1989年 1991 1993年2次赴日本进行合作研究O 主要从事液压 气动自适应控制 鲁棒控制等的研究O 主编 控制工程基础 气压传动与控制 ,编著 液压系统仿真与C A D 自适应控制理论与应用 ,副主编 现代控制理论与工程 等9本书,发表学术论文40多篇O E -m a i i z he ns hunw u@163.c o mO 收稿日期$2006-09-1101 机床与液压第35卷基于Simulink仿真平台上的随机干扰液压自适应控制系统作者:吴振顺, 肖原, WU Zhenshun, XIAO Yuan作者单位:哈尔滨工业大学机电工程学院,哈尔滨,150001刊名:机床与液压英文刊名:MACHINE TOOL & HYDRAULICS年,卷(期):2007,35(8)被引用次数:1次1.市川邦彦制御系の設計理论 19882.金井喜美雄ロバスト適应制御入門 19893.吴振顺自适应控制理论与应用 20054.楼顺天;于卫基于MATLAB的系统分析与设计-控制系统 19985.吴振顺电液伺服系统的鲁棒自适应控制的研究 1996(08)6.吴振顺液压数字自适应控制系统的非最小相位问题及其对策 1996(04)1.马良玉.阎秦.王兵树.庞占洲.MA LIANGYU.YAN QIN.WANG BINGSHU.PANG ZHANZHOU过热汽温内模自适应控制方案设计及仿真[期刊论文]-微计算机信息2007,23(10)2.田春雨.张秋翔.蔡纪宁.李双喜.TIAN Chun-yu.ZHANG Qiu-xiang.CAI Ji-ning.LI Shuang-xi FLUENT软件对直线槽动压密封的模拟[期刊论文]-液压气动与密封2008,28(4)3.吴振顺自适应控制理论在液压力控制系统中的应用研究[期刊论文]-机床与液压2000(6)4.吴振顺.汲永涛.许文波应用变换的零极点配置数字自适应调节器及其在液压系统中的应用[期刊论文]-机械工程学报2002,38(3)5.杨国来.司国雷.张守印.张慧敏.YANG Guo-lai.SI Guo-lei.ZHANG Shou-yin.ZHANG Hui-min纯水液压锥阀结构的优化设计与流场的数值分析[期刊论文]-液压与气动2005(8)6.吴振顺.肖原.赵春雷.张立春.WU Zhen-shun.XIAO Yuan.ZHAO Chun-lei.ZHANG Li-chun基于Simulink 图型模态液压自适应控制的实现[期刊论文]-计算机仿真2007,24(5)7.李宝峰.薛红军.宋笔锋.LI Bao-feng.XUE Hong-jun.SONG Bi-feng基于SIMULINK的弹射救生人椅系统六自由度仿真[期刊论文]-系统仿真学报2007,19(6)8.郭辉.王平军.郭涛.GUO Hui.WANG Pingjun.GUO Tao基于Simulink的飞机液压助力器建模与仿真研究[期刊论文]-机床与液压2007,35(9)9.高军礼.邓则名.李芳可调增益的模型参考自适应控制及其仿真[期刊论文]-信阳师范学院学报(自然科学版) 2001(3)1.杨东.毛耀.丁科.李志俊模型参考算法在快速反射镜中的应用[期刊论文]-红外与激光工程 2013(10)引用本文格式:吴振顺.肖原.WU Zhenshun.XIAO Yuan基于Simulink仿真平台上的随机干扰液压自适应控制系统[期刊论文]-机床与液压 2007(8)。
[收稿日期]2007208228 [作者简介]韩皓(19822),男,2004年大学毕业,硕士生,现主要从事自动控制与仿真方面的研究工作。
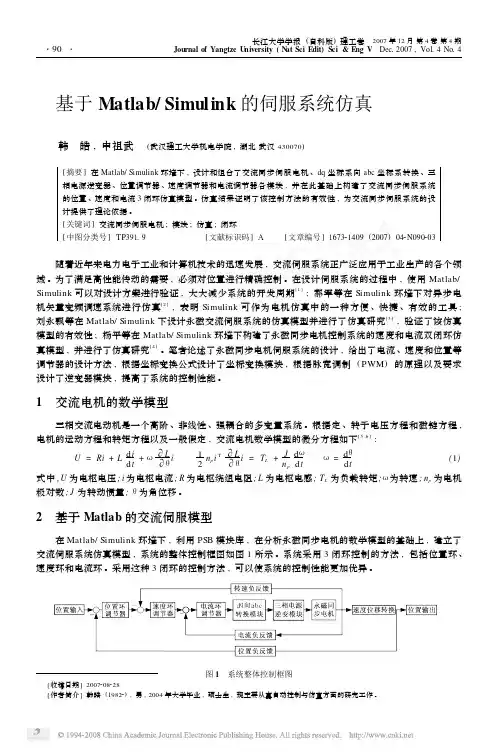
基于Matlab/Simulink 的伺服系统仿真 韩 皓,申祖武 (武汉理工大学机电学院,湖北武汉430070)[摘要]在Matlab/Simulink 环境下,设计和组合了交流同步伺服电机、dq 坐标系向abc 坐标系转换、三相电源逆变器、位置调节器、速度调节器和电流调节器各模块,并在此基础上构建了交流同步伺服系统的位置、速度和电流3闭环仿真模型。
仿真结果证明了该控制方法的有效性,为交流同步伺服系统的设计提供了理论依据。
[关键词]交流同步伺服电机;模块;仿真;闭环[中图分类号]TP39119[文献标识码]A [文章编号]167321409(2007)042N090203 随着近年来电力电子工业和计算机技术的迅速发展,交流伺服系统正广泛应用于工业生产的各个领域。
为了满足高性能传动的需要,必须对位置进行精确控制。
在设计伺服系统的过程中,使用Matlab/Simulink 可以对设计方案进行验证,大大减少系统的开发周期[1];郝军等在Simulink 环境下对异步电机矢量变频调速系统进行仿真[2],表明Simulink 可作为电机仿真中的一种方便、快捷、有效的工具;刘永飘等在Matlab/Simulink 下设计永磁交流伺服系统的仿真模型并进行了仿真研究[3],验证了该仿真模型的有效性;杨平等在Matlab/Simulink 环境下构建了永磁同步电机控制系统的速度和电流双闭环仿真模型,并进行了仿真研究[4]。
笔者论述了永磁同步电机伺服系统的设计,给出了电流、速度和位置等调节器的设计方法,根据坐标变换公式设计了坐标变换模块,根据脉宽调制(PWM )的原理以及要求设计了逆变器模块,提高了系统的控制性能。
1 交流电机的数学模型三相交流电动机是一个高阶、非线性、强耦合的多变量系统。
线性自抗扰控制在火电机组主蒸汽温度控制中的应用仿真针对大容量火电机组的直流锅炉主蒸汽温度控制难度较大问题,研究了线性自抗扰控制技术(LADRC)对经典串级PID技术在温度控制特性上的提高。
首先介绍了大容量火电机组的直流锅炉温度控制特性及其机理模型,然后介绍了線性自抗扰控制技术的控制思想与原理,最后利用simulink工具进行模型搭建,对主蒸汽温度控制进行仿真实验。
仿真结果表明,相对经典串级PID技术而言,线性自抗扰控制技术具有更强的鲁棒性和抗干扰性能。
标签:自抗扰技术;PID;主蒸汽温度控制;扩张状态观测器0 引言大型火电机组均采用直流锅炉,锅炉提供的过热蒸汽进入汽轮机,并推动发电机进行发电。
锅炉出口处的蒸汽温度、压力、流量等特性决定了机组的安全性、发电量以及经济效益等特性。
其中600MW超临界机组的主蒸汽温度设定值一般为560°C,主温度过低会使得机组的热效率降低,由于主蒸汽设定温度接近过热器管道的钢结构的耐受温度,主蒸汽温度过高则会造成过热器管道爆管,对整个机组的安全运行构成威胁,因而控制锅炉出口处的过热蒸汽温度保持稳定具有极其重要的作用。
超(超)临界机组的锅炉为直流锅炉。
要保证主蒸汽温度的稳定,其汽温控制的基本措施是保持煤水比进行粗调,利用减温喷水进行细调[1]。
目前大部分电厂采用串级PID对主蒸汽温度进行控制,选取喷水口的蒸汽温度为导前量进行控制。
在内环中对喷水口处的蒸汽温度进行控制,在外环中对过热器出口处的蒸汽温度进行控制。
使用经典串级PID进行主蒸汽温度控制往往难以取得比较理想的控制效果,甚至影响机组自动发电控制(AGC)和锅炉运行的安全和稳定。
自抗扰控制(Active Disturbance Rejection Control)是韩京清研究员于上个世纪八十年代末提出的一种新型控制技术,它是一种估计补偿不确定因素的控制技术[2]。
自抗扰控制技术在对控制对象进行控制时,不需要知道系统的数学模型,对非线性、大惯性、不确定时滞等复杂系统具有很好的控制效果[3]。
某舰炮伺服系统建模仿真
王丹峰;申中华
【期刊名称】《机电产品开发与创新》
【年(卷),期】2018(031)001
【摘要】某舰炮伺服控制系统采用典型的三环回路控制结构,计算机作为位置环控制器核心,对整个伺服控制系统以及舰炮整体采取集中监控、离散控制.论文根据某舰炮实际物理伺服系统,采用Madab/Simulink仿真软件建立了舰炮高低伺服系统的仿真模型,并对目前位置环控制器采用的分段非线性PID算法进行了仿真分析.仿真结果表明:仿真波形与实际物理系统波形基本一致,验证该模型的有效性,为研究位置环控制器算法提供了工具.
【总页数】4页(P54-57)
【作者】王丹峰;申中华
【作者单位】中船重工第七一三研究所,河南郑州 450015;中船重工第七一三研究所,河南郑州 450015
【正文语种】中文
【中图分类】TJ391
【相关文献】
1.基于线性自抗扰技术的舰炮伺服系统仿真研究 [J], 马晓贺;李翔宇
2.基于Stribeck模型的舰炮伺服系统摩擦力矩补偿 [J], 赵远征;陈延伟;程守虎
3.基于GA的双模糊控制器控制系统在舰炮液压伺服系统中的应用 [J], 刘志伟;张
凌海;张逸群
4.舰炮建模仿真应用研究 [J], 颜世刚;齐亚峰
5.舰炮建模仿真应用研究 [J], 颜世刚;齐亚峰;
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Simulink的舰船主炮半主动控制隔振系
统仿真与分析
舰船在海上航行时,受到来自海浪的涌动、风力的作用以及内部振动
等多种外部扰动影响,这些扰动会对舰船的稳定性和安全性产生负面影响。
因此,为了提高舰船携载武器系统的稳定性和精准性,研究舰船主炮半主动控制隔振系统成为了一个重要的课题。
首先,本文将简要介绍舰船主炮半主动控制隔振系统的研究背景和意义,指出了该系统在舰船战斗效能提升和乘员生存环境改善方面的重要作用。
随后,对隔振系统的基本原理和工作机理进行了详细的阐述,包括控制器设计、传感器选取、执行器配置等关键技术。
接着,本文着重介绍了Simulink在舰船主炮半主动控制隔振系统仿
真中的应用。
Simulink作为一种基于模型的设计与仿真工具,在舰船主炮
半主动控制隔振系统的研究中具有重要作用。
借助Simulink,研究人员可
以方便地建立系统动力学模型,进行参数调节和控制算法设计,实现系统性能评估和优化。
随后,本文将详细介绍舰船主炮半主动控制隔振系统在不同海况下的
仿真研究结果,并进行分析和讨论。
通过改变不同的输入条件和参数设置,研究人员可以观察到系统在不同情况下的响应情况,验证系统设计的合理性和实用性。
最后,本文总结了舰船主炮半主动控制隔振系统的仿真与分析工作,指出了目前研究存在的不足和未来的发展方向。
通过本文的研究,可以更好地理解舰船主炮半主动控制隔振系统的工作原理和性能特点,为今后舰船设计和改进提供参考和借鉴。
在未来的研究中,可以进一步优化系统结构和控制算法,提高系统的稳定性和可靠性,实现更好的舰船武器系统性能和乘员舒适性。
火炮直驱伺服系统的模型校正控制
刘妙;张光辉;刘攀玲;马佳佳;王佳雯
【期刊名称】《火炮发射与控制学报》
【年(卷),期】2016(037)001
【摘要】射击时,火炮采用的直驱技术会对射击准确性产生较大的影响。
为了削减射击力矩的影响,采用了一种火炮直驱伺服系统的模型校正控制方法。
以某多管并联火炮为例计算了其单管射击力矩,建立了考虑射击力矩因素的校正控制模型,并利用 Matlab/Simulink对其进行数值仿真。
仿真结果显示模型校正控制可以削弱射击力矩的影响,并且在短时间内达到稳定。
该仿真结果为火炮直驱伺服系统的设计起到指导作用。
【总页数】5页(P45-49)
【作者】刘妙;张光辉;刘攀玲;马佳佳;王佳雯
【作者单位】西北机电工程研究所,陕西咸阳 712099;西北机电工程研究所,陕西咸阳 712099;西北机电工程研究所,陕西咸阳 712099;西北机电工程研究所,陕西咸阳 712099;西北机电工程研究所,陕西咸阳 712099
【正文语种】中文
【中图分类】TJ81+0.37
【相关文献】
1.永磁同步直驱伺服电动机的模型校正控制 [J], 黄梁松;曲道奎;徐方
2.直驱容积控制电液伺服系统模型与动态特性 [J], 刘军龙;姜继海;欧进萍;张春巍;
刘庆和
3.直驱式电液伺服系统PID校正复合控制器研究 [J], 刘勇;王勇
4.基于AMESim-MATLAB联合仿真的双泵直驱电液伺服系统压力控制 [J], 王波; 熊瑞平; 赵亚文; 邓银; 程昶运; 舒生豪
5.直驱式电液伺服系统速度与位置复合控制系统仿真 [J], 杨国来;乔樑;白桂香;陈伟;何皓
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Simulink的火炮伺服系统自抗扰控制仿真
作者:郭婧杨刚杨军贾强
来源:《现代电子技术》2014年第10期
摘要:为了解决火炮伺服系统存在负载变化大、冲击扰动力矩强等问题,将自抗扰控制技术应用到火炮伺服系统位置控制器中。
该控制算法通过实时估计与补偿来弥补传统控制方法的不足。
通过在Simulink软件平台搭建了ADRC的火炮伺服系统三环模型,仿真结果对比传统PID控制。
对比结果表明,基于ADRC的系统超调小、响应速度较快、具有较强的鲁棒性。
关键词: Simulink;伺服系统;自抗扰;火炮
中图分类号: TN964⁃34 文献标识码: A 文章编号: 1004⁃373X(2014)10⁃0120⁃03
Abstract: An active disturbance rejection control (ADRC) technology is proposed for an artillery servo system with load disturbance and large disturbed moment. It is to be used in the location controller in the artillery servo system. The control method made up insufficient of the traditional control method by real⁃time estimation and compensation. Three⁃loop model (speed loop, location loop and current loop) of artillery servo system with closed⁃loop ADRC was established in the Simulink software. It was compared with the traditional PID mode control method. The simulation results show the system based on ADRC technology has the advantages of
high⁃speed response, less overshoot and strong robustness.
Keywords: Simulink; servo system; ADRC; antillery
0 引言
某火炮伺服系统是一个具有冲击力矩强、负载变化大等特点的非线性系统。
针对此类大时滞、参数变化较大的系统,传统PID控制由于响应快速和超调之间的矛盾以及参数需要实时调整等现存问题不能满足其控制精度和跟踪要求。
自抗扰控制器(Active Disturbance Rejection Controller,ADRC)是基于PID控制器发展的一种新型非线性控制器。
ADRC汲取经典PID的优点及现代控制理论的控制思路方法,解决了响应快速与超调的矛盾以及现代控制理论依赖控制对象数学模型的局限,具有广阔的应用前景[1⁃3]。
本文将自抗扰控制技术运用于某火炮位置伺服系统,基于Simulink平台进行建模。
通过仿真分析,采用自抗扰技术实现对某火炮位置伺服系统的控制,并与传统PID控制的结果进行对比分析。
1 自抗扰控制器的原理
ADRC是在非线性PID框架上,用“扩张状态观测器”对扰动进行实时估计与补偿构造出具有“自抗扰功能”的新型实用控制器[4]。
ADRC由跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF)三部分构成。
TD根据伺服系统的输入[θi]和承受力来安排过渡过程;ESO的作用是由控制量和被控对象的输出[θo],估计出伺服系统的状态和所受到的总的未知扰动的实时作用量;TD的输出和ESO的状态变量之间产生误差,NLSEF利用此误差用非线性组合形式产生控制量对系统进行补偿[5]。
2 控制系统的设计
2.1 控制对象
本文以某火箭炮位置伺服系统进行建模仿真研究。
按位置环、速度环、电流环三闭环调速系统对伺服系统建立模型。
对于水平调炮1 000 mil,PID控制器需要重新调整参数。
由图7可以看出:PID控制和ADRC控制也都可满足控制要求。
PID控制响应时间为10.2 s,ADRC的系统响应时间为8.5 s,ADRC速度较快,无振荡与超调。
通过以上对比仿真分析可知:采用ADRC作为控制器的系统,响应性能明显优于传统PID控制器。
以阶跃作为输入主令的ADRC算法,系统调炮误差小,系统的响应速度快,且具有较强的抗干扰能力。
因此,所设计的ADRC控制器能够满足某火炮控制系统相关要求。
5 结论
针对某火炮伺服系统,采用ADRC对其进行控制建模和仿真分析。
仿真结果表明,在同被控伺服系统并加入相同干扰的条件下,较之采用传统PID控制器的位置伺服系统,采用ADRC的火炮位置伺服系统具有更优良的性能,且无超调,对干扰等变化具有更强的鲁棒性。
参考文献
[1] 徐振辉.基于遗传算法的自抗扰炮控系统优化设计[J].计算机与现代化,2012,12(15):43⁃46.
[2] 张意,马清华.基于自抗扰控制技术的导弹控制系统设计[J]. 弹箭与制导学报,2010,32(1):37⁃40.
[3] 滕福林,胡育文.基于自抗扰控制器的交流位置伺服系统[J].电气传动,2011(11):43⁃46.
[4] 韩京清.一类不确定对象的扩张状态观测器[J].控制与决策,1995,10(1):85⁃88.
[5] 韩京清,王伟.非线性跟踪:微分器[J].系统科学与数学,1994,14(2):177⁃183.
[6] 周伟科,吕强.自抗扰控制在坦克炮控执行机构中的应用[J].火炮发射与控制学报,2009(3):18⁃21.
[7] 孙凯,许镇琳.基于自抗扰控制器的永磁同步电机位置伺服系统[J].中国电机工程学报,2007,27(15):43⁃46.。