门式起重机控制系统
- 格式:doc
- 大小:114.00 KB
- 文档页数:4
门式起重机控制系统设计
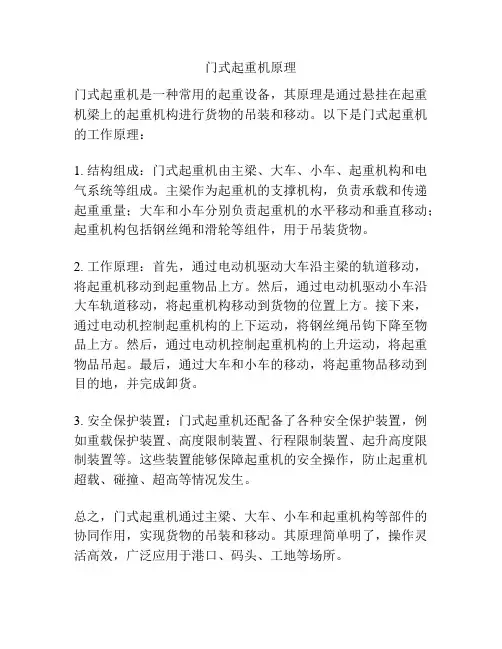
门式起重机是桥式起重机的一种变形,主要用于室外的货场、料场货、散货的装卸作业。
它的金属结构像门形框架,承载主梁下安装两条支脚,可以直接在地面的轨道上行走,主梁两端可以具有外伸悬臂梁。
门式起重机具有场地利用率高、作业范围大、适应面广、通用性强等特点,在港口货场得到广泛使用。
PLC控制技术已经成为目前轨道式集装箱门式起重机的基本配置。
PLC系统可以与工控机相连,与上位监控软件进行数据交换;还可以与司机室触摸屏相连,将有关数据传送到触摸屏监控软件,极大地方便了起重机的使用与维护。
完善的电气保护系统和故障自动检测系统是现代起重机控制技术的一个重要特点,触摸屏成为轨道龙门吊司机室的必要配置。
另外,直观的动画显示、中文显示、存储、打印功能等也得到广泛应用。
1.1 门式起重机的工作类型及过程
断续周期性工作类型:
生产机械的工作类型有连续、短时和断续周期性三种。
断续周期性工作类型的特点是:有一系列相似的工作周期。
在每个工作周期中,机构的工作是短时的,间断的,其中有工作时间,也有休息时间。
这些工作周期又是持续的、频繁的、重复的进行。
起重机吊运重物的过程是:首先将大车和小车开至吊运物的上空,放下吊钩,升起重物,将大车和小车开至安放重物位置的上空,放下重物,升起吊钩,以上是一个工作周期。
再将大车和小车开至另一重物的上空,进入下一个工作周期,如此不断的重复运行。
在某一工作周期中,无论是大车,小车还是吊钩,就一个机构而言,都不是连续工作的,而是短时工作,其中有工作时间(本机构工作时),也有休息时间(其他机构工作时)。
这些都符合断续周期性工作类型的特点,所以说起重机的主要工作机构是断续周期性类型运行的。
与之相适应,起重机的主要电控设备(电动机、控制器、控制屏、电阻器、继电器等)也是按断续周期性工作类型运行的。
断续周期性运行时,在一个工作周期中,有工作时间,也有休息时间。
对电动机或电器元件的温升来说,开始工作时,不能达到其稳定值,停止时,也不能冷却到周围介质的温度,如此重复多次之后,温度便逐渐升高,最后在某两个固定的温度值间变化,温度基本稳定。
按规定每一周期持续时间不超过10min,超过10min的应按短时工作类型考虑。
断续周期性运行时,各工作周期不断重复进行,要求电动机经常起动和制动,电器元件经常接通和分断,接电次数多,工作频繁。
断续运行(既有工作时间又有休息时间)和不断重复(接电次数多,工作繁重)
是起重机电器设备的两个主要特点。
所以起重机用的电动机和主要电器元件(控制器、变频器、接触器、电阻器、继电器等)都是专门设计的,并自成系列。
1.2 电气控制系统
1.电制与供电
本机采用交流380V、50Hz三相四线制供电系统。
动力回路380V,控制回路和照明回路为220V,安全电压为24V。
整机供电采用磁滞式电缆卷筒供电(左右卷放有效长度为150m),小车供电采用悬挂电缆小车式。
2.电力拖动与控制
本设备起升机构、大、小车运行机构全部采用变频驱动装置;控制系统采用PLC;故障诊断及显示采用触摸屏。
3.操作:
先解除行走锚定装置,然后合上总隔离闸刀和总空气开关,此时主配电板(MBD)和联动台(TQK)上合闸指示灯亮,再检查三相电源情况,若正常可进行吊装作业。
(1)大车运行机构:使用1SA进行运行机构的操作,左右各4个操作档位。
可实现平滑地匀加速或匀减速运动。
当该机构从运动状态到停止时,先断电,延时5~6秒后自动抱闸,以减少整机制动时的冲击和震动。
(2)小车运行机构:该机构操作手柄为3SA,设置前进和后退各四个档位,可实现平滑地匀加速或匀减速运动。
在两腿外侧悬臂端设置有慢速运行区域,当小车从悬臂端向内侧运行时,不受上述限制。
(3)起升机构:该机构的操作手柄为2SA,起升和下降各四个操作档位,可实现平滑地匀加速或匀减速运动。
(4)保护
按照《起重机设计规范》和《起重机安全规程》的规定,整机设置有总的过流、短路、失压、欠压保护,并且在联动台和主电源柜上、机器房以及在下横梁对角位置设有紧停按钮。
大车运行机构:该机构设置有零压、零位、过流短路,正反向联锁,极限位置限位,电缆卷筒极限限位等保护,另外还设置有锚定联锁以及防护器顶松轨联锁等。
小车运行机构:该机构设置有零位、零压、过流和短路保护,以及正反向联锁、悬臂端限速和极限位置保护等,另外还设置有驾驶室通道口联锁开关和小车锚定装置。
起升机构:该机构设置有零位、零压、过流短路保护,正反向联锁、上下预限位保护,极限位置保护和应急限位保护以及超载保护等。
(5)信号、通讯和照明
a 超负荷限制器在起升机构吊重达到额定载荷的95%时,发出报警信号,在达到额定载荷的110%时,起升机构断电,只允许下降操作。
b 大车运行时有间断的声光报警信号以提醒现场人员避让。
c 各机构极限位置时产生报警信号。
d 风速超过额定值时产生报警信号,并停止整机工作。
e 设置二部对讲机以便起重机上下联系。
f 照明:本机在梁底部设置有8盏500W投光灯,在小车架底部设置有4盏500W投光灯作为工作照明,司机室、机器房、电气房、楼梯走道都设置有足够的照明设置和不同电压等级的插座。
在机器房配置有2台轴流风机,在电气房配置有一台轴流风机以改善散热条件。
在司机室和机器房内的电气房各设置1部双制式空调。
另外还配备了2盏隔爆型手提检修灯(可充电式)和必要的消防设备。
1.3 变频器的选择
变频器是利用电力半导体器件的通断作用将工频电源变换为另一频率的电能控制装置。
它主要由两部分电路构成,一是主电路(整流模块、电解电容和逆变模块),二是控制电路(开关电源板、控制电路板)。
CPU就安装在控制电路板上,变频器的操作软件烧录在CPU上,同一型号的变频器软件是固定的,唯一例外的就是三晶变频器,软件可根据使用需求更改。
在电力拖动领域,解决好电动机的无级调速问题具有十分重要的意义
图1 变频调速系统图
变频器:为电动机提供可变频率的电源,实现电动机的调速。
门式起重机大车、小车、副钩、主钩电动工作由各自的PLC控制,大车、小车、副钩、主钩电动机都运行在电动状态,控制过程基本相似,变频器与PLC之间控制关系在硬件组成以及软件的实现基本相同,而主钩电动机运行状态处于电动、倒拉反接或再生制动状态,变频器与PLC之间控制关系在硬件组成以及软件的实现稍有区别。
控制小车电动机的变频器与PLC控制原理图如图2所示。
图3.4 变频器与PLC控制原理图
门式起重机小车电动机的工作过程:在驾驶室内及横梁栏杆门关好后,位置开关SQa、SQb,SQc闭合,紧急开关SB2等符合要求的情况下,速度选择开关置于零位,按下起动按钮SB1,接触器KM通电吸合,三相电源接通。
当速度选择开关置于正转速度1时,将三相交流电和电动机接通,1档速度起动,速度选择开关置于正转速度2时,2档速度运行,一般桥式起重机正反向均有5档速度,其余与此类似。
速度选择开关置于零位或由于停电,电动机停止运行。
为防止因停电、变频器跳闸等使拖动负载快速下降出现危险,乃设置有机械制动装置。
当发生紧急情况时,可立即拉开紧急开关SB2,一方面机械制动将所有电动机制动,另一方面将变频器紧急停机控制端EMS接通,变频器将使电动机迅速停机。
当电动机过载时,可使热继电器的触点FR接通变频器的外接保护控制端,使变频器停止工作。
位置开关SQ1和SQ2装在小车两头。
当小车行走到终端时,两端各有挡块,撞上位置开关,切断小车电路,小车电动机停车并制动。
变频器因发生故障而跳闸后,当故障已被排除,可以重新起动时,按下复位按钮SB,接通复位控制端RST,使变频器恢复到运行状态。
控制小车电动机的变频器输入控制端的安排:一般门式起重机有五档速度,所以3个外接开关K3,K4,K5来控制速度信号,达到调节速度的目的(实际可达八档速度),外接开关状态与速度的对应关系如下表1.1所示。
用户可自由设定与每档速度对应的频率大小。