仪器精度分析与精度设计示例共56页文档
- 格式:ppt
- 大小:5.54 MB
- 文档页数:56
名词解释:1. 测量范围:所谓测量范围只在允许误差范围内一起的被测量值的范围。
2. 滞差:在输入量由小逐渐增大再由大逐渐减小的过程中,对用一大小的输入量出现不同大小的输出量,这种由于测量行程方向的不同,对应于同一出入量产生输出的差异统称为滞差。
3. 零值误差:指当测量为零值时,测量仪器示值相对于零的差值,也可说是测量仪器的零位误差。
4. 示值误差:指测量仪器的示值与被测量的真值之差。
5. 齿轮空会:齿轮机构在工作状态下,输入轴方向回转时,输出轴产生的滞后量。
6. 准确度:测量仪器给出接近于真值的响应能力。
7. 等效节点:将一对共轭点A 和A ’用虚线连起来,次虚线和光轴的交点为J 0,则透镜绕点J 0微量转动,像点不懂,称为J 0透镜的等效节点,称过点J 0作光轴的垂面为等效接平面。
8. 螺旋线误差:螺杆旋转一个螺距周期,在同一半径的圆柱截面内,加工形成的螺旋线轨迹与理论螺旋线轨迹之差。
9. 灵敏度:即仪器对被测量变化的反应能力。
S=xL 10. 阿贝原则:所谓阿贝原则,即被测尺寸与标准尺寸在测量方向的同一直线上,或者说,被测量轴线只有在基准轴线的延长线上,才能得到精确的测量结果。
11. 螺距积累误差:在给定长度范围内,任意两牙间的距离对公称尺寸偏差的最大代数和。
12. 视差:指示器与标尺表面不在同一平面时,观察者偏离正确观测方向进行读数或瞄准时所引起的误差。
13. 漂移:指仪器特性随时间的缓慢变化,通常表现为零位或灵敏度随时间的缓慢变化,风别称为零点漂移和灵敏度漂移。
14. 等效节平面:将一对共轭点A 和A ’用虚线连起来,次虚线和光轴的交点为J 0,则透镜绕点J 0微量转动,像点不懂,称为J 0透镜的等效节点,称过点J 0作光轴的垂面为等效接平面。
15.量化误差:由于脉冲数字系统中,用脉冲或数码表示连续变化的物理量,因此介于两个脉冲或两个数码之间的值只能用与它相接近的脉冲或数码表示,这样便产生了误差。
>才智/208仪器仪表的精确度分析高华 朱海龙 郑州光力科技股份有限公司 郑州 450000摘要:本文先给出了表征仪器仪表的精确度的相关参数和指标,然后针对某款仪器的测量数据,对其精确度进行了计算,并给出了详细的计算步骤。
关键词:仪器仪表;精确度;计算步骤;计算方法仪器仪表发挥其作用的方式是测量,各种形式的测量构成了一个完整的体系,保证国家经济建设的正常运行。
保证测量结果的准确性是仪器仪表生产厂商所必须承担的责任。
但是,任何测量都是有误差的,不能够完全准确地与真实值相符合,这与仪器仪表的制造水平有很大的关系。
1.仪器仪表精确度的表征方法用误差的形式来表达该值偏离真实值的程度。
这就涉及到了仪器仪表的精度问题,仪器仪表的“精确度”表征的是测量结果是否可信的度量,其相似的属于还包括准确度、精密度和正确度。
准确度:表征测量结果和真实值之间相符合的程度,是测量中的系统误差和随机误差的综合反映;精密度:表征的是测量结果之间相一致的程度,是测量结果中随机误差大小的反应。
当然测量时应尽量保证测量的条件时相同的;正确度:表征的系统误差的大小,反映了测量结果中系统误差的影响程度;不确定度:是对真实值所处量值范围的评价和判断,也是测量中无法修正的部分。
2.仪器仪表精确度的计算下面将根据某测量仪器的测量数据,给出详细的计算过程和计算步骤。
1)对仪器仪表进行校准。
通过对已知的标准值或可以作为标准值的标准装置的测量,标定仪器仪表。
2)对同一个标准值进行五次以上的测量,并记录下来读数。
测量时要尽量保证减少人为操作的误差。
3)记录5-10组读数值。
在保证测量条件一直的情况下,可以在组与组之间有一定的时间间隔。
如表1所示。
4)计算每一组的平均值,结果如表1所示,i X =11n ∑=11n j i jX 其中,i=6,1n =5。
5)计算各组的标准差i S ,结果如表1所示,iS =∑=−−1121)(11n j i i j X X n 6)计算测量结果的总的平均值X =∑=2121nj iX n 表1测量及部分计算结果7)计算总的标准差p S 。
第十六章典型仪器的精度分析本章主要介绍电子经纬仪、光电坐标投影仪和万能工具显微镜等三种典型仪器的精度分析。
第一节电子经纬仪的精度分析一电子经纬仪的测角原理和基本结构电子经纬仪是一种精密测角仪器,可用于测量水平角和垂直角。
在大地测量、矿山测量和工程建设中,为了确定地面点的位置常常需要进行角度的精密测量。
在天文测量中,为了确定星点的位置,亦采用所谓天文经纬仪。
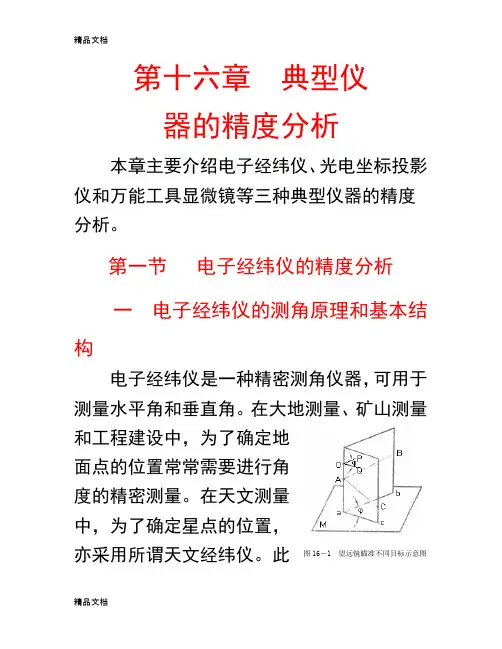
此图16-1 望远镜瞄准不同目标示意图外,在实验室中进行仪器的装配校正和光学测量时,也常用高精度的光电经纬仪作为测角的基准仪器。
图16-1为经纬仪测量水平角的基本原理。
A、B和C是地面上的三个任意点,为了确定三点之间的水平夹角ϕ,通过地面线AB和AC各作一竖直面,这两个竖直面与水平面M的交线为ab和ac,则ab与ac的夹角ϕ即为水平角。
要用经纬仪测出水平角ϕ,光电经纬仪的基本结构应由以下五大部分组成(见图16-3):1.轴角编码器轴角编码器用于测量角度。
图16-1中的O点即为编码器码盘中心,OP学经纬仪都是采用玻璃度盘。
度盘刻有许多刻线,测角时可读出度和分的读数值。
现代光电经纬仪则采用轴角编码器测角。
作为光电读数系统之一的光电轴角编码器,采用光电方法将轴角信息转换成电压信息,经电路处理为数字代码形式。
光电轴角编码器与光学读数系统相比,前者能给出一串实时输出的数字代码代替人工读数。
所以在近代光电经纬仪,电影经纬仪,雷达等设备中均广泛采用。
其工作原理如图16-2所示。
图中,光源1经光学系统2均匀照明码盘3进入狭缝4,光电探测器5的光敏面上,当码盘绕竖轴旋转时,随着码盘与狭缝的相对位移而改变光通量的大小,形成一交变的光信号经光探测器转换成电信号,经放大器6,逻辑处理7后,将竖轴9的角位移量用数码显示器8显示。
因此,光电编码器是一种由光学、精密机械和电子三部分组成的新型测角系统。
2.瞄准系统此即带有分划板的望远镜。
它能绕水平轴转动,便瞄准(照准)不同高度的目标B 和C(图16-1)。