第四章 连续时间系统的频域分析
- 格式:ppt
- 大小:1.82 MB
- 文档页数:45

第四章.连续时间信号与系统频域分析一.周期信号的频谱分析1. 简谐振荡信号是线性时不变系统的本征信号:()()()()()j tj t j tj y t eh t eh d ee h d ωωτωωτττττ∞∞---∞-∞=*==⋅⎰⎰简谐振荡信号傅里叶变换:()()j H j e h d ωτωττ∞--∞=⎰点 测 法: ()()j t y t e H j ωω=⋅ 2.傅里叶级数和傅里叶变换3.荻里赫勒(Dirichlet )条件(只要满足这个条件信号就可以用傅里叶级数展开)○1()f t 绝对可积,即00()t T t f t dt +<∞⎰○2()f t 的极大值和极小值的数目应有限 ○3()f t 如有间断点,间断点的数目应有限4.周期信号的傅里叶级数5.波形对称性与谐波特性的关系6.周期矩形脉冲信号7.线性时不变系统对周期信号的响应一般周期信号:()jn tnn F ef t ∞Ω=-∞=∑系统的输出 :()()jn tnn F H jn t e y t ∞Ω=-∞Ω=∑ 二.非周期信号的傅里叶变换(备注)二.非周期信号的傅里叶变换1.连续傅里叶变换性质2.常用傅里叶变换对四.无失真传输1.输入信号()f t 与输出信号()f y t 的关系 时域: ()()f d y t kf t t =-频域:()()dj t f Y ke F ωωω-=2.无失真传输系统函数()H ω ()()()d f j t Y H ke F ωωωω-==无失真传输满足的两个条件:○1幅频特性:()H k ω= (k 为非零常数) 在整个频率范围内为非零常数 ○2相频特性:ϕ()d t ωω=- ( 0d t > )在整个频率范围内是过坐标原点的一条斜率为负的直线3. 信号的滤波:通过系统后 ○1产生“预定”失真○2改变一个信号所含频率分量大小 ○3全部滤除某些频率分量 4.理想低通滤波器不存在理由:单位冲击响应信号()t δ是在0t =时刻加入滤波器 的,而输出在0t <时刻就有了,违反了因果律5.连续时间系统实现的准则时 域 特 性 : ()()()h t h t u t =(因果条件) 频 域 特 性 : 2()H d ωω∞-∞<∞⎰佩利-维纳准则(必要条件):22()1H d ωωω∞-∞<∞+⎰五.滤波。
连续时间信号与系统的频域分析报告1. 引言连续时间信号与系统的频域分析是信号与系统理论中的重要分支,通过将信号和系统转换到频域,可以更好地理解和分析信号的频谱特性。
本报告将对连续时间信号与系统的频域分析进行详细介绍,并通过实例进行说明。
2. 连续时间信号的频域表示连续时间信号可以通过傅里叶变换将其转换到频域。
傅里叶变换将信号分解成一系列不同频率的正弦和余弦波的和。
具体来说,对于连续时间信号x(t),其傅里叶变换表示为X(ω),其中ω表示频率。
3. 连续时间系统的频域表示连续时间系统可以通过频域中的频率响应来描述。
频率响应是系统对不同频率输入信号的响应情况。
通过系统函数H(ω)可以计算系统的频率响应。
系统函数是频域中系统输出与输入之比的函数,也可以通过傅里叶变换来表示。
4. 连续时间信号的频域分析频域分析可以帮助我们更好地理解信号的频谱特性。
通过频域分析,我们可以获取信号的频率成分、频谱特性以及信号与系统之间的关系。
常用的频域分析方法包括功率谱密度估计、谱线估计等。
5. 连续时间系统的频域分析频域分析也可以用于系统的性能评估和系统设计。
通过分析系统的频响特性,我们可以了解系统在不同频率下的增益和相位变化情况,进而可以对系统进行优化和设计。
6. 实例分析以音频信号的频域分析为例,我们可以通过对音频信号进行傅里叶变换,将其转换到频域。
通过频域分析,我们可以获取音频信号的频谱图,从而了解音频信号的频率成分和频率能量分布情况。
进一步,我们可以对音频信号进行系统设计和处理,比如对音乐进行均衡、滤波等操作。
7. 结论连续时间信号与系统的频域分析是信号与系统理论中重要的内容,通过对信号和系统进行频域分析,可以更好地理解和分析信号的频谱特性。
频域分析也可以用于系统的性能评估和系统设计,对于音频信号的处理和优化具有重要意义。
总结:通过本报告,我们了解了连续时间信号与系统的频域分析的基本原理和方法。
频域分析可以帮助我们更好地理解信号的频谱特性和系统的频响特性,对系统设计和信号处理具有重要意义。
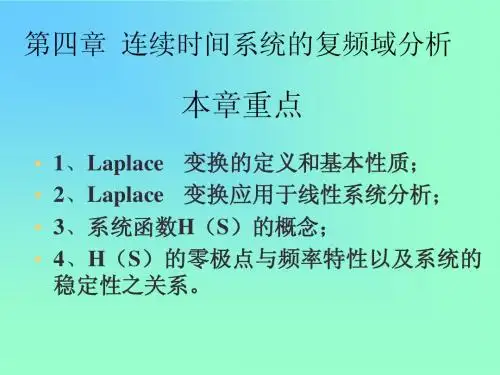
《信号与系统信号与系统》》自测题第4章 连续时间连续时间信号与信号与信号与系统的的系统的的系统的的复复频域分析一、填空题1、由系统函数零、极点分布可以决定时域特性,对于稳定系统,在s 平面其极点位于 左半开平面(不含虚轴) 。
2、线性时不变连续时间系统是稳定系统的充分必要条件是()H s 的极点位于s 平面的 左半开平面(不含虚轴) 。
3、()H s 的零点和极点中仅 极点 决定了()h t 的函数形式。
4、()H s 是不 随系统的输入信号的变化而变换。
5、已知某系统的系统函数为()H s ,唯一决定该系统单位冲激响应()h t 函数形式的是()H s 的 极点 。
6、如下图所示系统,若221()2()()22U s H s U s s s ==++,则L = 2 H ,C =14F 。
注:2211()121/2()1()(0.5)1221/2U s Cs H s U s Ls Cs s s Ls Cs +====++++++2Ls s =222LCs s = 所以 2L = 1/4C =7、某信号2()x t t =,则该信号的拉普拉斯变换是32s。
注:1!()nn n t t sε+↔8、若信号3()t f t e =,则()F s =13s −。
9、431s s ++的零点个数是 0 ,极点个数是 4 。
10、求拉普拉斯逆变换的常用方法有 部分分式分解法 、 留数法 。
1(U s Ls+−+−2()s11、若信号的单边拉普拉斯变换为32s +,则()f t =23()t e u t −。
12、已知6()(2)(5)s F s s s +=++,则原函数()f t 的初值为 1 ,终值为 0 。
注:6(0)lim 1(2)(5)s s f s s s →∞+=×=++ 06()lim 0(2)(5)s s f s s s →+∞=×=++13、已知2()(2)(5)sF s s s =++,则原函数()f t 的初值为 2 ,终值为 0 。

信号与系统中的连续时间系统分析信号与系统是电子工程、自动控制等领域重要的基础学科,与我们日常生活息息相关。
在信号与系统中,连续时间系统分析是其中的重要内容之一。
本文将着重介绍连续时间系统分析的基本概念、方法和应用。
一、连续时间系统的概念连续时间系统是指信号的取样频率大于或等于连续时间信号的变化频率,信号在任意时间均有定义并连续可取值。
连续时间系统包括线性系统和非线性系统两种,其中线性系统是一类常见且具有重要意义的系统。
二、连续时间系统的表示连续时间系统可以通过微分方程或差分方程来表示,其中微分方程常用于描述线性时不变系统,而差分方程常用于描述线性时变系统。
在实际应用中,可以通过拉普拉斯变换或傅里叶变换对连续时间系统进行分析和求解。
三、连续时间系统的性质连续时间系统具有多种性质,包括线性性、时不变性、因果性、稳定性等。
其中线性性是指系统对输入信号的响应是可叠加的,时不变性是指系统的输出与输入之间的关系不随时间的推移而改变。
四、连续时间系统的频域分析连续时间系统的频域分析是通过傅里叶变换来实现的,可以将时域中的信号转换为频域中的频谱。
通过频域分析,我们可以获得系统的幅频特性和相频特性,进一步了解系统对不同频率信号的响应。
五、连续时间系统的时域分析连续时间系统的时域分析是通过微分方程或差分方程来实现的,可以确定系统的时域特性。
通过时域分析,我们可以获得系统的阶数、单位阶跃响应、单位冲激响应等关键信息。
六、连续时间系统的应用连续时间系统的分析在实际应用中具有广泛的应用价值。
例如,在通信系统中,我们需要对信号进行调制、解调、编码、解码等处理,这些过程都需要借助连续时间系统的分析方法。
此外,连续时间系统的分析也在信号处理、图像处理、音频处理等领域有着重要的应用。
结语:连续时间系统分析是信号与系统学科中的重要内容,具有广泛的理论基础和实际应用。
通过深入学习连续时间系统的概念、表示、性质、频域分析、时域分析和应用,我们可以更好地理解和掌握信号与系统的基本原理和方法,为相关领域的研究和应用提供理论指导和技术支持。
连续时间LTI 系统的频域分析一、实验目的1、 掌握系统频率响应特性的概念及其物理意义;2、 掌握系统频率响应特性的计算方法和特性曲线的绘制方法,理解具有不同频率响应 特性的滤波器对信号的滤波作用;3、 学习和掌握幅度特性、相位特性以及群延时的物理意义;4、 掌握用MATLA 爵言进行系统频响特性分析的方法。
基本要求:掌握LTI 连续和离散时间系统的频域数学模型和频域数学模型的MATLAB 苗述方法,深刻理 LTI 系统的频率响应特性的物理意义,理解滤波和滤波器的概念,掌握利 用MATLAB 十算和绘制LTI 系统频率响应特性曲线中的编程。
二、实验原理及方法1连续时间LTI 系统的频率响应所谓频率特性,也称为频率响应特性,简称频率响应(Frequency response ),是指 系统在正弦信号 激励下的稳态响应随 频率变化的情况,包括响应的幅度随频率的变化情况 和响应的相位随频率的变化情况两个方面。
连续时间LTI 系统的时域及频域分析图上图中x(t)、y(t)分别为系统的时域激励信号和响应信号, h(t)是系统的单位冲激响。
它们三者之间的关系为:y(t) =x(t)*h(t),由傅里叶变换的时域卷积定理可得到:Y(j ) =X(j )H(j )3.1或者:H (j ,)二 Y(j -3.2X(浮)H(j )为系统的频域数学模型,它实际上就是系统的单位冲激响应h(t)的傅里叶变换。
即Q0H (代)=Jh(t)e j<s dt3.3由于H(j ■)实际上是系统单位冲激响应h(t)的傅里叶变换,如果 h(t)是收敛的,或者 说是绝对可积(Absolutly integrabel)的话,那么 H(j •‘)一定存在,而且 H(j •‘)通常是复数,因此,也可以表示成复数的不同表达形式。
在研究系统的频率响应时,更多的是把x(t)X (f .)y(t)Y(? ■)它表示成极坐标形式:H j)= Hj)e% 3.4上式中,H(jco)称为幅度频率相应(Magnitude response ),反映信号经过系统之后,信号各频率分量的幅度发生变化的情况,申(①)称为相位特性(Phase response ),反映信号经过系统后,信号各频率分量在相位上发生变换的情况。