第三章-参数曲面-第一基本形式
- 格式:pdf
- 大小:281.26 KB
- 文档页数:10
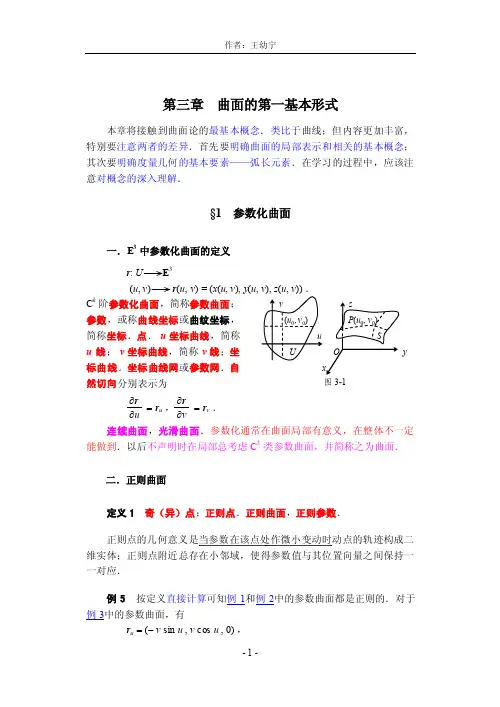
第三章 曲面的第一基本形式本章将接触到曲面论的最基本概念.类比于曲线;但内容更加丰富,特别要注意两者的差异.首先要明确曲面的局部表示和相关的基本概念;其次要明确度量几何的基本要素——弧长元素.在学习的过程中,应该注意对概念的深入理解.§1 参数化曲面一.E 3 中参数化曲面的定义r : U →E 3(u , v )→ r (u , v ) = (x (u , v ), y (u , v ), z (u , v )) .C k 阶参数化曲面,简称参数曲面;参数,或称曲线坐标或曲纹坐标,简称坐标.点. u 坐标曲线,简称u 线; v 坐标曲线,简称 v 线;坐标曲线.坐标曲线网或参数网.自然切向分别表示为∂r ∂u = r u ,∂r ∂v= r v . 连续曲面,光滑曲面.参数化通常在曲面局部有意义,在整体不一定能做到.以后不声明时在局部总考虑 C 3 类参数曲面,并简称之为曲面.二.正则曲面定义1 奇(异)点;正则点.正则曲面,正则参数. 正则点的几何意义是当参数在该点处作微小变动时动点的轨迹构成二维实体;正则点附近总存在小邻域,使得参数值与其位置向量之间保持一一对应.例5 按定义直接计算可知例1和例2中的参数曲面都是正则的.对于例3中的参数曲面,有r u = (- v sin u , v cos u , 0) ,图3-1r v = (cos u , sin u , 1) ,r u ⨯r v = (v cos u , v sin u , - v ) = v (cos u , sin u , -1) ;r u ⨯r v 当且仅当参数 v = 0 时为零向量,故参数值 (u , 0) 对应于全部非正则点——锥顶.对于例4中的旋转面,当 f (v ) = 0 时,对应点不是正则的.例6 单位圆柱面具有存在奇点的下列参数化:r (t , z ) = (cos t 2 , sin t 2 , z ) . 一般地,存在奇点的参数曲面在奇点附近的性质需要单独加以讨论,并且往往比较复杂;而对于连续可微参数曲面,正则点附近总存在较小邻域使正则性得到满足.因此将曲面论的局部基本理论建立在正则曲面之上,是具有一般性的.三.正则曲面的切平面和法线已知正则曲面 S : r = r (u , v ) .考虑过点 r (u 0, v 0) , r (u 0+∆u , v 0) 和 r (u 0,v 0+∆v ) 的平面 ∏ 当 (∆u , ∆v )→(0, 0) 时的极限位置,亦即切平面的位置.正则性保证了平面 ∏ 的极限位置平面 ∏0的法向向量确定为r u (u 0, v 0)⨯r v (u 0, v 0) .曲面上的曲线在该点处的切向量总落在平面 ∏0 上面;任给坐标曲线自然切向量的线性组合,曲面上总存在曲线以之为点 r (u 0, v 0) 处的切向.定义2 切平面;法线,法向;单位法向特指为单位向量(1.2) n (u 0, v 0) = r u (u 0, v 0)⨯r v (u 0, v 0) |r u (u 0, v 0)⨯r v (u 0, v 0)|; 正定向,简称正向;负定向,简称负向.正则曲面是有正定向的曲面.在切点 P : r (u 0, v 0) 处的切平面通常记为 T P ,它按坐标曲线自然切向量的线性组合可以理解为二维向量空间(1.3) T P = {a r u (u 0, v 0) + b r v (u 0, v 0) | (a , b )∈R 2 } ≅ E 2 ,其中的向量称为曲面的切向量,两个切向量 a 和 b 的内积 (a , b ) 规定为 E 3 的诱导内积,即(1.4) (a , b ) = a ∙b , ∀ a , b ∈T P .图3-5此时,切平面同时具有向量空间结构和度量结构.切平面的基向量组{r u, r v} 通常称为自然基,而标架场{r;r u, r v, n} 通常称为自然标架场.用经典微积分的观点来看,切平面上的微元(1.5)d r(u, v) =r u(u, v)d u+r v(u, v)d v是位置向量增量 [r(u + d u , v + d v) -r(u, v)] 的线性主部,称为切向微元;按(1.3) 式所表示的同构,其按自然基分解的系数(d u, d v) 亦可视为切平面中的微元,其方向由比例d u:d v确定.例8已知半径为a > 0 的圆柱面的经纬参数方程为r(t, z) = (a cos t , a sin t , a z) .试求其过点 (a, 0, a) 的任意切向以及分别由比例 1:2 和 1:0 确定的切向.例9已知正则曲面由隐式方程F(x, y, z) = 0 确定,其中梯度向量∇F = (F x, F y, F z) ≠0.证明该曲面上点 (x, y, z) 处的法向确定为∇F(x, y, z) .四.参数变换定义3给定正则曲面S: r= r(u, v) ,若参数变换{u=u(u*, v*)v=v(u*, v*)满足①是连续可微的一一对应;②Jacobi行列式∂(u, v)∂(u*, v*)=∂u∂u*∂v∂u*∂u∂v*∂v∂v*处处非零,u*图3-6则称之为容许参数变换;当 ∂(u , v ) ∂(u *, v *) > 0 时称之为保向的,当 ∂(u , v ) ∂(u *, v *)< 0 时称之为反向的.注记 容许参数变换只有保向或反向两种.在容许参数变换 {u = u (u *, v *)v = v (u *, v *)下,有 (1.6) ⎝⎛⎭⎫ r u * r v * = ⎝ ⎛⎭⎪⎫∂u ∂u * ∂v ∂u *∂u ∂v * ∂v ∂v * ⎝⎛⎭⎫ r ur v, (1.7) r u *⨯r v * = ∂(u , v ) ∂(u *, v *)r u ⨯r v . 由此可知,在容许参数变换下,正则性和可微性保持不变,切平面不变;单位法向在保向容许参数变换下不变,在反向容许参数变换下变号.五.参数曲面的等价类似曲线的论断:① 一个曲面点集实体允许存在多种参数化方式,有参数变换.② 曲面实体的几何属性不依赖于其参数化的方式,也不依赖于空间直角坐标系的选取.③ 两个合同的曲面实体相当于同一曲面实体的不同位置表现形式. ④ 若两张正则曲面之间仅仅相差一个容许的参数变换,则它们表示同一个几何实体,称这两张正则曲面是相同的.相同的正则曲面实际上是指正则曲面的一种等价类,其在同一实点上的切平面、法线等等几何实体分别是重合的.⑤ 定向相同的;定向相反的.⑥ 定向相同的曲面的单位法向以及有向切平面,对于每个对应点都是唯一确定的.⑦ 曲面的整体概念和整体性质是复杂的,将留待于第八章中进行较为深入的讨论.约定:在以后讨论曲面局部性质的各章中,不声明时总考虑正则曲面和容许参数变换,并分别简称为曲面和参数变换.§2 直纹面与可展曲面直纹面可以由一族直线“织成”,即:过曲面上每一点都存在过该点的直线落在该曲面上.一.直纹面及其上的参数变换直纹面的直纹或(直)母线;准线.直纹的位置和直纹上的点的相对位置,给出直纹面 S 的下列自然参数化(2.1) S : r = r (u , v ) = a (u ) + v l (u ) ,其中准线为连续可微参数曲线(2.2) C : r * = a (u ) ,过准线上点 a (u ) 处的直纹方向确定为向量l (u ) ,且 l (u ) 连续可微.此时,(2.5) r u ⨯r v = [a '(u ) + v l '(u )]⨯l (u ) = a '(u )⨯l (u ) + v l '(u )⨯l (u ) .由此可确定正则条件.例1 直纹面可按 (2.1) 式准线与直纹方向的关系归为不同的子类. ① 柱面:各直纹平行.正则性条件即为准线不与直纹相切,单位法向沿着直纹是常向量,切平面沿着直纹重合.② 锥面:各直纹相交于锥顶点.准线可以“收缩”为锥顶.不妨设已经规范为a (u ) ≡ a 0 ,则正则性条件化为(2.7) r u ⨯r v = v l '(u )⨯l (u ) ≠ 0 .故锥顶是奇点;并且,当直纹单位方向向量在单位球面上为正则曲线时,也只有锥顶是奇点.其切平面沿着直纹也重合.③ 切线面:直母线族是某条准线的切线族,即直母线族有包络线可作为准线.不妨设已经规范为a '(u ) = l (u ) ≠ 0 ,且此时不妨设准线以 u 为弧长参数,则正则性条件化为(2.8) r u ⨯r v = v T '(u )⨯T (u ) ≠ 0 .图3-7① ② ③图3-8此时的准线称为切线面的脊线,其上点点为奇点.当脊线无逗留点时,切线面上除脊线外的各点都是正则点.其切平面沿着直纹也重合.④ 主法线面:直母线族是某条准线的主法线族.⑤ 从法线面:直母线族是某条准线的从法线族.例2 正螺旋面或正螺面;其准线可取为旋转轴.正螺面相应单位法向垂直于z 轴;旋转轴上各点处的切平面公交于旋转轴.例3 Möbius 带实体无所谓“正”的定向.直纹面按照准线和直母线族的自然参数化,具有明显的几何直观.准线的转换以及直纹方向向量长度的转换,在自然参数化下,就等价于适当的参数变换;这是一种具有几何意义的参数变换.设直纹面 S 的自然参数化由 (2.1)-(2.2) 式给出.作直母线方向向量的“伸缩”变换和准线变换分别为(2.9) l *(u ) = λ(u ) l (u ) , λ(u ) ≠ 0 ,(2.10) a *(u ) = a (u ) + μ(u ) l (u ) ,其中变换系数函数 λ(u ) 和 μ(u ) 都是连续可微的.令(2.12) {u * = uv * = [v - μ(u ) ] λ(u ) , 则得到容许参数变换,与原有方程的对应关系为(2.14) r = r (u , v ) = a (u ) + v l (u ) = r *(u *, v *) = a *(u *) + v * l *(u *) . 由此可以进一步考察准线和直母线是否允许有特殊关系.引理1 已知直纹面的自然参数化由 (2.1)-(2.2) 式给出,则存在新的参数化,使其准线与直母线处处正交,并且直纹方向向量为单位向量.二.可展曲面及其局部形状分类柱面、锥面、切线面的切平面分别沿着直纹重合;而从正螺面的图形观察到,沿着所给定的直纹移动时,切平面将发生扭转.图3-9 图3-11定义1若直纹面的切平面沿着每一条直纹都分别重合,则称该直纹面为可展曲面,或称该直纹面可展.例4柱面、锥面、切线面都可展.单叶双曲面和双曲抛物面都不可展——这从图形上可以观察到;也可以在任何直纹上展开计算,而由定义得到验证.定理1(直纹面可展的解析条件)设直纹面 S: r=r(u, v) =a(u) +v l(u) 正则.S可展的充要条件为a' , l , l'共面,即(2.15) (a' , l , l' ) ≡ 0 .对指定直纹族的直纹面而言,该解析条件不依赖于准线以及直纹方向向量长度的选取.要考虑可展曲面的其它特征;除了本节将继续讨论的以外,可展曲面的“内在特征”将在后续章节中出现.注记直纹面的直纹族并不一定是唯一的,比如单叶双曲面、双曲抛物面都有两族直纹,而平面的直纹族更加随意指定.以后可以证明,两族坐标曲线都是直线的正则曲面若可展,则只能是平面(或其局部).在“较好”的准线a(u) 和直纹方向向量l(u) 之下,解析条件可以进一步化简.特别当直纹方向向量规范为单位向量场时,即|l(u)|2≡ 1 时,有l'(u)∙l(u) ≡ 0 ;进而分两种情形:①当l'(u)⨯l(u) =0时,自然总有等价条件(a'(u) , l(u) , l'(u) ) = 0 ⇔l'(u) =0;②当l'(u)⨯l(u) ≠0时,l'(u) ≠0,便有等价条件(a'(u) , l(u) , l'(u) ) = 0 ⇔∃λ(u), μ(u) 使a'=λl'+μl;从此出发,利用准线变换,对可展曲面的局部形状可构造性地进行分类.参数变换的目标是确定如例1所给出的规范参数方程.在下面定理的证明中,可注意体会几何直观对证法的启发,以及如何明确地加以表述.定理2(可展曲面局部形状分类)可展曲面必是柱面、锥面和切线面之一或由它们沿直母线所适当拼接而成.证明由引理1和定理1,设可展曲面 S: r=r(u, v) =a(u) +v l(u) 满足|l(u)|2≡ 1 ;则由简化的解析条件,可完全分类为以下三种情形:①l'≡0,则l(u) = const. ≠0;此时S为柱面.②l'≠0,∃λ, μ使a'=λl'+μl;此时要证S为锥面或切线面.(注意:锥面存在新准线C*: a*(u) 使a* = const. ,而切线面存在新准线C*:a*(u) 使关于弧长的导数d a*d s C*=l,它们的共同特征是a*'(u)∥l.)作待定的新准线C*: a*(u) =a(u) +b(u) l(u) 使a*'(u)⨯l(u) ≡0,其中待定函数b(u)连续可微,则a*'=a'+b'l+b l'= (λ+b) l'+ (μ+b') l;故取b=-λ即可满足要求.此时,a*'= (μ-λ') l.由此,当a*'≡0即λ'≡μ时,a* = const. ,则S为锥面;当a*'≠0即λ'≠μ时,l=a*'μ-λ'=d a*d s C*,则S为切线面.③其他;由以上两种情形的讨论过程可知,l'以及 (μ-λ') 的例外零点对应于曲面上相应的直母线.综合各种情形,得证.三.单参数曲面族的包络观察例5管状面.定义2单参数曲面族Sλ的包络面S*,简称包络.例6可展曲面是其本身切平面族的包络,切平面族的单参数就取为某条正则准线的参数.在求解包络时的先验假定,反验.定理3给定连续可微单参数λ正则曲面族Sλ: r(u, v; λ) .如果判别式(2.21) (r u , r v , rλ ) = 0能够决定连续可微的两个函数u(λ, t) 和v(λ, t),那么,该曲面族的包络若存在则只能确定为判别曲面r(u(λ, t), v(λ, t); λ);而若判别式无解函数u(λ, t) 和v(λ, t) ,则该单参数曲面族没有包络.注记:①判别式所确定的函数同时明确了对应点的位置.②判别式如果是平凡的,则判别曲面r(u(λ, t), v(λ, t); λ) 有可能蜕化为非正则的;此时需要反验是否符合包络条件.③如果判别曲面r(u(λ, t), v(λ, t); λ) 是正则的,则其为包络面;此时在某些具体条件下,两个函数u(λ, t) 和v(λ, t) 允许存在反函数,此即为包络面上的特殊参数变换.④对包络面r(u(λ, t), v(λ, t); λ) ,当选定参数λ=λ0时,其上曲线r(u(λ0, t), v(λ0, t); λ0) 是与族中曲面S的公切点构成的曲线,称之为包络面λ0的特征线.例7已知具有包络S* 的连续可微单参数λ曲面族Sλ: r(u, v; λ) = (x(u, v; λ),y(u, v;λ) ,z(u, v;λ))是由隐式方程F(x, y,z; λ) =0 给出的,其中梯度向量∇F=(F x ,F y, F z) ≠0.试证S* 的隐式方程为(2.22) {F(x, y, z; λ) = 0 ,Fλ(x, y, z; λ) = 0 .单参数曲面族由隐式方程给出时,其包络的判别曲面由特征线族方程(2.22) 式给出.有时,隐式方程对于表示曲面整体非常有效,比如球面、双叶双曲面等等;此时,由 (2.22) 式讨论包络是较为方便的.例8求单参数λ球面族x2+y2+ (z-λ)2= 1 的包络.定理4给定连续可微单参数t平面族T t: n(t)∙r-p(t) = 0 ,|n|≡ 1 ,n'(t) ≠0.如果 {T t} 的包络面S存在,则S可展.§3曲面的第一基本形式在指定的曲面上,测量曲线的长度并确定弧长元素、面积元素等等几何量,是曲面几何学基本的问题之一.勾股定理确定了三维 Euclid 空间的基本度量规则,作为该空间的几何子体,曲线和曲面上的度量规则由空间的度量规则而“诱导”确定;子体和原有 Euclid 空间的几何属性将在这种方式之下自然地联系在一起,构成空间几何属性的整体.本节将讨论曲面在这种方式之下的基本结果;而关于其他方式之下的讨论,将在第六章中和第八章中逐步引出和深入进行.本节总记正则曲面S的参数方程为r=r(u, v) , (u, v)∈U⊂R2.一.曲面上的弧长元素首先考虑曲面S上的曲线段的长度和弧长元素.设 C : r = r (u (t ), v (t )) , t ∈[a , b ]是 S 的正则曲线上的一个弧段.通常也用平面区域 U 上的参数方程 {u = u (t )v = v (t ), t ∈[a , b ] 表示曲线 C ;但要注意区分该表示式的双重含义:既表示平面区域 U上的一条参数曲线 C -1 ,同时也表示在曲面 S 上的对应曲线 C .为了区别不同的所在场合,当表示曲线 C时往往强调“在曲面 S 上”.记曲面上的量(3.1) E = E (u , v ) = r u ∙r u = |r u |2 , F = F (u , v ) = r u ∙r v , G = G (u , v ) = r v ∙r v = |r v |2 ,则对曲线 C 有d s 2 = d r ∙d r = [E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2 ]| u =u (t ), v =v (t ) = [E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 ]d t 2 , d s = | d r d t| d t = E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 | u =u (t ), v =v (t ) d t , 则有s (b ) - s (a ) = ⎰b ad s d t d t = ⎰b a | d r d t | d t = ⎰b a E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2| u =u (t ), v =v (t ) d t . 可见,使用平面区域 U 上的参数方程以及曲面的相应量,就可以得到曲面上的曲线的弧长元素和弧段长度;至于曲面及其上的曲线的位置向量如何,在上述算式中并不直接影响结果.曲面上的量对其上曲线的影响程度,将在进行进一步抽象之后,得到更明确的了解.对此应注意体会.二.第一基本形式定义1 对正则曲面 S : r = r (u , v ) , (u , v )∈U ⊂R 2 ,称二次微分式(3.2) Ⅰ = d s 2 = E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2为曲面 S 的第一基本形式,或称线素,其中系数由 (3.1) 式给出.图3-13注记: 第一基本形式系数也称为第一基本量.第一基本形式是由 E 3 的欧氏度量在曲面上所诱导出来的一种Riemann 度量.曲面第一基本形式d s 2 = d r ∙d r 的几何意义可用逼近的观点解释为:切向微元 d r 是位置差向量 [r (u +d u , v +d v ) - r (u , v )] 的线性主部,而弧长元素 d s = |d r | 是相应两点之间的距离微元的主部.第一基本形式在容许参数变换下不变,且在刚体运动下不变.第一基本形式的计算较为简单;但这是关于曲面的最基本和最重要的计算.下例展示了基本运算途径;同时,所得到的结论也是基本的.例1 已知平面 ∏: r (u , v ) = r 0 + u a + v b ,其中三个常向量 r 0, a , b 满足规范条件 |a | = |b | = 1 , a ∙b = 0 .观察其第一基本形式的三种系数行为.① 平面 ∏ 的第一基本形式为d s 2 = d r ∙d r = (a d u + b d v )∙(a d u + b d v ) = d u 2 + d v 2 .② 若在平面 ∏ 上采用极坐标系 (ρ, θ) ,即 {u = ρ cos θ v = ρ sin θ,则 r ρ = a cos θ + b sin θ ,r θ = (- a ρsin θ + b ρcos θ ) ;E (ρ, θ) = r ρ∙r ρ = (a cos θ + b sin θ)∙(a cos θ + b sin θ) = 1 ,F (ρ, θ) = r ρ∙r θ = (a cos θ + b sin θ)∙(- a ρsin θ + b ρcos θ) = 0 ,G (ρ, θ) = r θ∙r θ = (- a ρsin θ + b ρcos θ)∙(- a ρsin θ + b ρcos θ) = ρ2 ;此时,平面 ∏ 的第一基本形式(在极点无意义)为d s 2 = E (ρ, θ) d ρ2 + 2F (ρ, θ) d ρd θ + G (ρ, θ) d θ 2 = d ρ2 + ρ2 d θ 2 .③ 在平面 ∏ 上取任意一条无逗留点弧长 w 参数化曲线 C : ξ(w ) ,则其切线面r (w , t ) = ξ(w ) + t T (w ) 可表示一部分平面区域,其中 T 为 C 的单位切向.局部可得r w = T + t κ N ,r t = T ;E (w , t ) = r w ∙r w = (T + t κ N )∙(T + t κ N ) = 1 + t 2κ 2 ,F (w , t ) = r w ∙r t = (T + t κ N )∙ T = 1 ,G (w , t ) = r t ∙r t = T ∙ T = 1 ;此时,在平面 ∏ 上相应区域内,第一基本形式为d s 2 = E (w , t ) d w 2 + 2F (w , t ) d w d t + G (w , t ) d t 2= [1 + t 2κ 2(w )]d w 2 + 2d w d t + d t 2 .第一基本形式系数在容许参数变换下必须满足一定的变换规律.改写(3.3) Ⅰ = d s 2 = (d u , d v ) ⎝⎛⎭⎫E F F G ⎝⎛⎭⎫d u d v ;(3.4) d r = (d u , d v )⎝⎛⎭⎫r u r v ,(3.5) d r ∙d r = (d u , d v )⎝⎛⎭⎫r u r v ⎝⎛⎭⎫r u r v T ⎝⎛⎭⎫d u d v ,(3.6) ⎝⎛⎭⎫E F F G = ⎝⎛⎭⎫r u r v ⎝⎛⎭⎫r u r v T = ⎝⎛⎭⎫r u r v ∙ (r u , r v ) ,其中各式之中的位置向量视为行向量,分块矩阵之间用“∙”表示数量积.定义2 对正则曲面 S : r = r (u , v ) ,称二次型 (3.2) 或 (3.3) 的系数矩阵,即 (3.6) 式左端,为曲面 S 的第一基本形式系数矩阵;其行列式(3.7) E F F G= EG - F 2 = |r u |2|r v |2 - (r u ∙r v )2 = |r u ⨯r v |2 > 0 , 称为曲面 S 的第一基本形式系数行列式.性质 ① 正则曲面 S 的第一基本形式 (3.2) 是正定的二次型,即:d s 2 ≥ 0 ,且等号当且仅当 d u = d v = 0 时成立;② 正则曲面 S 的第一基本形式系数矩阵是正定的.在容许参数变换 {u = u (u *, v *)v = v (u *, v *)下记Jacobi 矩阵和Jacobi 行列式分别为 (3.8) J = ⎝ ⎛⎭⎪⎫∂u ∂u * ∂v ∂u *∂u ∂v * ∂v ∂v * ,∂(u , v ) ∂(u *, v *) = |J | ; 记参数 (u *, v *) 下曲面 S 的第一基本形式为d s 2 = E *(u *, v *) d u *2 + 2F *(u *, v *) d u *d v * + G *(u *, v *) d v *2.则由 (1.6) 式和 (1.7) 式分别代入 (3.6) 式和 (3.7) 式可得(3.9) ⎝⎛⎭⎫E * F *F * G * = ⎝⎛⎭⎫ r u * r v * ⎝⎛⎭⎫ r u * r v *T = J ⎝⎛⎭⎫ r u r v ⎝⎛⎭⎫ r u r v T J T = J ⎝⎛⎭⎫E F F G J T , (3.10) E *G * - F *2 = |J |2(EG - F 2) .这是两个具有理论意义的等式.第一个等式说明,第一基本形式系数矩阵服从所谓“张量”的变换规律,从而成为张量概念的直观背景之一.第二个等式将在下一段用来支持面积元素的概念,等价地写为(3.11) E *G * - F *2 = ||J || EG - F 2 . 例2 以平面弧长参数曲线为准线作柱面 S ,考察其第一基本形式;并证明其第一基本形式在某正则参数 (u , v ) 下可以表示为 d s 2 = d u 2 + d v 2 .三.交角与面积元素确定交角和面积等几何量.交角,有向交角.在自然标架下,有关曲面以及其上曲线的交角问题和面积问题,都可以利用自然基向量的数量积或向量积进行计算,从而转化为如何用第一基本形式表述或求解的问题.一般化的算法,体现在下面的较为具体的抽象计算过程中;而计算结果的意义,需要特别注意体会.1.曲面上的曲线的交角假设曲面 S 的第一基本形式以 (3.2) 式确定;设点 (u , v ) 处的两个切向微元在自然基 {r u , r v } 下分别为 d u :d v 和 δu :δv ,确定其间夹角余弦(3.12)式——曲面上的曲线的交角,由曲面的第一基本形式以及曲线在交点处的切方向完全确定;而曲线的切方向只由参数区域上的原像即可确定.参数区域上的曲线原像之间的交角取决于区域本身,而与曲面上的交角没有必然的联系.可参考图3-13观察这个事实.定理1 对正则曲面而言,两族坐标曲线处处正交的充要条件为其第一基本形式系数矩阵处处是对角阵.定义2 正交参数,正交参数网或正交网.定理1确定了曲面正交参数网的第一基本形式特征.例3 对正则曲面 S : r = r (u , v ) ,求两族坐标曲线的二等分角轨线 C 的微分方程.2.曲面的面积元素和区域面积曲面的面积元素可以表示为(3.13) d σ = |r u ⨯r v | d u d v= EG - F 2 d u d v .任一有界区域 r (U 0) 的面积 A (U 0)可以表示为(3.14) A (U 0) = ⎰⎰ U 0 d σ = ⎰⎰ U 0 |r u ⨯r v | d u d v = ⎰⎰ U 0EG - F 2 d u d v . 在参数变换下面积元素对应相同,面积也对应相同.v )图3-14定理2正则曲面的面积元素和区域面积由第一基本形式可完全确定.§4局部等距对应曲面间的正则对应.“贴广告”的体验:保持弧长以及由弧长所完全确定的几何量都不变.一.局部等距对应定义1局部等距对应;局部等距.等距对应;等距.等距与局部等距的区别.目前通常只考虑曲面间的局部等距对应,并简称为等距对应.定理1(局部等距对应充要条件)两张曲面局部等距的充要条件是按对应关系具有相同的第一基本形式.等距的曲面之间能够作为容许参数变换的对应关系,并不一定具有明显的解析表达式;同时,第一基本形式按对应关系相同,并不意味着它们的参数已经对应相同,即它们的第一基本形式系数并不总是相等,而只是在对应关系下以变换规律 (3.9) 式相联系.一般而言,寻求等距曲面之间的等距对应关系可以归结为求解由 (3.9) 式所给定的偏微分方程组,但其求解过程往往是困难重重和具有技巧的.从定理1看,通过计算第一基本形式即可验证对应关系是否为等距对应.而对于较为直观和简单的等距对应,通过分析几何直观及其所提供的启示,也可以找到相应的对应关系.例1悬链面与正螺面之间的局部等距对应悬链面与正螺面.悬链面去掉一条母线而“剪开”后,与正螺面的“一个螺纹”之间的等距对应.定理2可展曲面总存在与平面的局部等距对应.分析这个定理的结论和证明过程,可见可展曲面局部存在到平面之间的连续变形,使得变形过程中的每一张中间曲面都是可展的,并且在对应关系下直纹总变到直纹,同时每一张也都是互相等距对应的.这就是平整的“纸张”能够“不撕破”“不褶皱”地“贴合”在可展曲面上的原因.这个定理的逆定理也是成立的,其证明在后续两章给出.形象地说,可展曲面名副其实地“可展”成平面.一般而言,讨论曲面在保持等距意义下的连续形变,是较为复杂的.二.曲面的内蕴几何学概念定义2内蕴量,内蕴性质(内在性质);内蕴几何体.内蕴几何学.内蕴几何学的核心是讨论第一基本形式的不变量以及相关的几何属性.例如,球面与平面之间不存在局部等距对应,从而具有不同的内蕴几何学;而这个事实的证明,将在第五章利用所谓的Gauss绝妙定理给出.从内蕴几何角度来看,可展曲面的代表就是平面;有理由认为它的“内在弯曲”状况是“平坦”的,尽管有许多可展曲面的“外在弯曲”状况是“弯曲”的.而球面既是“外在弯曲”的,也是“内在弯曲”的.内蕴量和内蕴性质,还可以提示和帮助确定等距对应关系.§5局部正交参数网与等温参数适当坐标系的选取是非常重要的.简化计算.另一种作用是,根据场合选取具有特定几何意义的坐标系,有时会成为揭示和解决问题的关键.本节将给出一个基础性结论,它经常用于建立所需要的局部坐标系,包括确定一些具有特定几何意义的参数曲线网的局部存在性.一.一般结论与正交网定理1设二阶连续可微正则曲面S: r=r(u, v) , (u, v)∈D上已给出两个处处线性无关的连续可微切向量场a(u, v) , b(u, v) ,则对任何点 (u0, v0)∈D满足r u*∥a , r v*存在其邻域D0⊂D,使在D0内存在参数变换{u* =u*(u, v)v* =v*(u, v)∥b,即切向量场a(u, v) , b(u, v) 的积分曲线族分别为u*, v* 曲线族.定理2在二阶连续可微正则曲面上的任一点邻近总可取到正交网.证明对曲面S: r=r(u, v) , (u, v)∈D,取a(u, v) =r u(u, v) ,b(u, v) =r v(u, v) -FEr u(u, v) ,则a, b是两个处处线性无关的连续可微切向量场,并且处处正交.由定理1,可分别取切向量场a, b的积分曲线族为局部的两族坐标曲线,则此两族坐标曲线构成正交网.□注记①曲面正交网的存在性是局部性质;至于大范围内是否存在正交网,往往受到曲面整体性质的约束.②曲面上的处处正交的单位切向量场总是存在的;但是,定理并没有保证它们可以成为自然切向量场,而只是保证它们可以处处平行于某个自然切向量场.二.等温参数定义1曲面的等温参数.在等温参数下,内蕴量的计算较为简单.同时,从(3.12) 式可见,曲面上的曲线的交角,总等于其在等温参数区域中的原像(当视为欧氏平面上的曲线时)的交角.曲面与欧氏平面在等温参数下的这种对应关系,是一类共形对应,或称为保角对应或等角对应.例1Mercator地图.等温参数的存在性是较难证明的.定理3在二阶连续可微正则曲面上的任一点邻近,总可取到等温参数网.推论二阶连续可微正则曲面局部共形对应于平面;二阶连续可微正则曲面之间总可局部共形对应.。
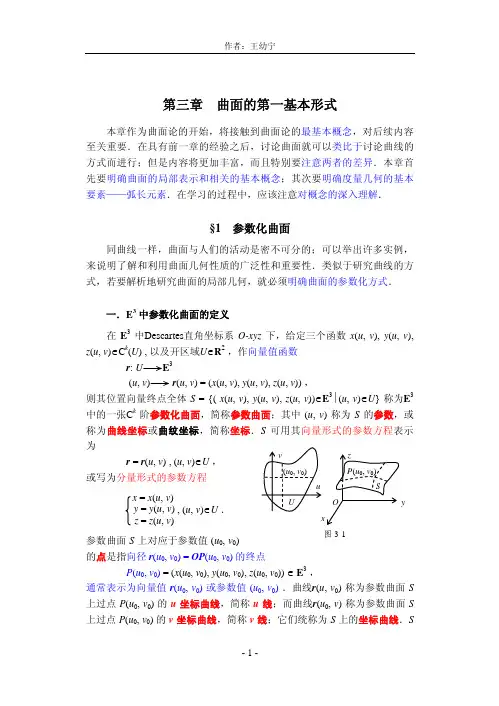
微分几何陈维桓第三章讲稿目录第三章曲面的第一基本形式 (27)§ 3.1 正则参数曲面 (27)一、参数曲面 (27)二、参数变换 (28)三、正则曲面 (28)四、正则曲面的例子 (29)§ 3.2 切平面和法线 (33)一、曲面的切空间,切平面和法线 (33)二、连续可微函数的等值面 (34)三、微分«Skip Record If...»的几何意义 . (34)§ 3.3 第一基本形式 (35)§ 3.4 曲面上正交参数曲线网的存在性 (37)§ 3.5 保长对应和保角对应 (38)一、曲面到曲面的连续可微映射 (38)二、切映射 (38)三、保长对应(等距对应) (40)四、保角对应(共形对应) (41)§ 3.6 可展曲面 (42)第三章 曲面的第一基本形式本章内容:曲面的定义,参数曲线网,切平面,单位法向量,第一基本形式,正交参数网,等距对应和共形对应,可展曲面计划学时:12学时,含习题课4学时.难点:正交参数网的存在性,等距对应和共形对应§ 3.1 正则参数曲面一、参数曲面从平面«Skip Record If...»的一个区域(region ,即连通开集)«Skip Record If...»到«Skip Record If...»中的一个连续映射«Skip Record If...»的象集«Skip Record If...»称为«Skip Record If...»中的一个参数曲面(parameterized surface). 在«Skip Record If...»中取定正交标架«Skip Record If...»«Skip Record If...»,建立笛卡尔右手直角坐标系. 则参数曲面«Skip Record If...»可以通过参数(parameter)«Skip Record If...»表示成参数方程«Skip Record If...» «Skip Record If...», (1.1)或写成向量参数方程«Skip Record If...»,«Skip Record If...». (1.2)为了使用微积分工具,本书中要求向量函数«Skip Record If...»都是3次以上连续«Skip Record If...»-曲线:让«Skip Record If...»固定,«Skip Record If...»变化,向量«Skip Record If...»的终点描出的轨迹.«Skip Record If...»-曲线,参数曲线网.直观上,参数曲面«Skip Record If...»就是将平面中的区域«Skip Record If...»经过伸缩、扭曲等连续变形后放到欧氏空间«Skip Record If...»中的结果.曲纹坐标«Skip Record If...»,即«Skip Record If...».r 00(,)r u v一般来说,由(1.1)给出的连续映射并不能保证曲面上的点«Skip Record If...»与该点的参数«Skip Record If...»之间是一一对应的. 为了使得曲纹坐标能真正起到坐标的作用,需要对参数曲面加上正则性条件.定义设«Skip Record If...»为«Skip Record If...»中的参数曲面. 如果在«Skip Record If...»点,两条参数曲线的切向量«Skip Record If...»,«Skip Record If...» (1.3)线性无关,即«Skip Record If...»,则称«Skip Record If...»或«Skip Record If...»是«Skip Record If...»的正则点(regular point). 如果«Skip Record If...»上每一点都是正则点,则称«Skip Record If...»是正则参数曲面.以下总假定«Skip Record If...»是正则曲面. 在正则曲面上每一点«Skip RecordIf...»,由于«Skip Record If...», (1.4)通过重新选取正交标架«Skip Record If...»,不妨设«Skip Record If...».根据反函数定理,存在«Skip Record If...»的邻域«Skip Record If...»,使得«Skip Record If...»有连续可微的反函数«Skip Record If...»,«Skip Record If...»,即有«Skip Record If...».此时有«Skip Record If...»的邻域«Skip Record If...»和同胚映射«Skip Record If...». 从而有连续映射«Skip Record If...». 于是«Skip Record If...»在«Skip Record If...»的邻域«Skip Record If...»内可用参数方程表示为«Skip Record If...», (*) 或表示为一个二元函数«Skip Record If...»的图像,其中«Skip Record If...». (1.5)上式称为曲面片«Skip Record If...»的Monge形式,或称为«Skip Record If...»的显式方程.从(*)式可见«Skip Record If...»是一一对应,从而«Skip Record If...»也是一一对应. 这说明正则性条件至少保证了«Skip Record If...»局部是一一对应. 为了确定起见,以下约定正则曲面«Skip Record If...»与其定义域«Skip Record If...»之间总是一一对应的,从而参数«Skip Record If...»可以作为曲面上点«Skip Record If...»的曲纹坐标.反之,由显式方程«Skip Record If...»表示的曲面总是正则的:如果«Skip Record If...», (1.6)则«Skip Record If...»,«Skip Record If...»,从而«Skip Record If...».二、参数变换曲面的定向(orientation):对于曲面«Skip Record If...»,规定«Skip Record If...»所指的一侧为«Skip Record If...»的正侧.由于参数曲面的参数方程中,参数的选择不是唯一的,在进行参数变换(transformation of parameter)时,要求参数变换«Skip Record If...» (1.8) 满足:(1) «Skip Record If...»是«Skip Record If...»的3次以上连续可微函数;(2) «Skip Record If...»处处不为零.这样的参数变换称为可允许的(compatible)参数变换. 当«Skip Record If...»时,称为保持定向(preserve the orientation)的参数变换.根据复合函数的求导法则,在新的参数下,«Skip Record If...», «Skip Record If...».因此«Skip Record If...». (1.10) 上式说明在可允许的参数变换下,正则性保持不变;在保持定向的参数变换下,曲面片的正侧保持不变.三、正则曲面正则参数曲面在具体应用总是十分方便,十分广泛的. 但是有的曲面不能够用一张正则参数曲面来表示,例如球面.将«Skip Record If...»与«Skip Record If...»等同,赋予普通的度量拓扑,即以«Skip Record If...»的标准度量确定的拓扑.定义1.1设«Skip Record If...»是«Skip Record If...»的一个子集,具有相对拓扑. 如果对任意一点«Skip Record If...»,存在«Skip Record If...»在«Skip Record If...»中的一个邻域«Skip Record If...»(«Skip Record If...»,其中«Skip Record If...»是«Skip Record If...»在«Skip Record If...»中的邻域),和«Skip Record If...»中的一个区域«Skip Record If...»,以及同胚«Skip Record If...»,使得«Skip Record If...»是«Skip Record If...»中一个正则参数曲面«Skip Record If...»,则称«Skip Record If...»是«Skip Record If...»中的一张正则曲面(regular surface),简称曲面. 上述的邻域«Skip Record If...»和同胚«Skip Record If...»的逆映射«Skip Record If...»合在一起,将«Skip Record If...»称为该曲面的一个局部参数化(local parameterization),或坐标卡(coordinate chart).注 «Skip Record If...»的拓扑是作为«Skip Record If...»的子集从«Skip Record If...»诱导的相对拓扑,即作为«Skip Record If...»的拓扑子空间的拓扑.如果两个局部参数化«Skip Record If...»,«Skip Record If...»满足«Skip Record If...»,那么正则参数曲面«Skip Record If...»就有两个参数表示«Skip Record If...»和«Skip Record If...». 由此自然产生了参数变换«Skip Record If...».利用正则参数曲面«Skip Record If...»的3次以上连续可微性和正则性,可以证明上述参数变换是可允许的.直观上看,正则曲面«Skip Record If...»是由一些正则参数曲面“粘合”而成的. 只有那些与参数的选择无关的量才是曲面本身的几何量. 如果一个正则曲面有一族保持定向的局部参数化«Skip Record If...»(«Skip Record If...»为指标集),使得«Skip Record If...»构成«Skip Record If...»的开覆盖,则称该曲面是可定向的(orientable).除非特别指出,本课程一般是研究正则参数曲面的几何性质,称之为“局部微分几何学”. 以下所说的“曲面”一般都是正则参数曲面,包括习题中出现的“曲面”.例1.1 圆柱面(cylinder) «Skip Record If...»«Skip Record If...»,«Skip Record If...». (1.15)其中«Skip Record If...».当«Skip Record If...»时,圆柱面上少了一条直线«Skip Record If...».如果取«Skip Record If...»,上面的直线在参数曲面上,但是又少了一条直线«Skip Record If...».显然«Skip Record If...»是任意阶连续可微的. 又«Skip Record If...»,«Skip Record If...»,«Skip Record If...».所以圆柱面是正则曲面.圆柱面也可以用一个坐标卡表示:(,)r u v 121(r U U -⋂1r 2r 21r«Skip Record If...»,«Skip Record If...». 例1.2 球面(sphere) «Skip Record If...»,参数方程为«Skip Record If...»,«Skip Record If...». (1.16)其中«Skip Record If...». 由于«Skip Record If...»,«Skip Record If...»,«Skip Record If...»,所以球面是正则曲面.例1.3 旋转面(revolution surface)设«Skip Record If...»是«Skip Record If...»平面上一条曲线,其中«Skip Record If...». 将«Skip Record If...»绕«Skip Record If...»轴旋转得到的旋转面«Skip Record If...»参数方程为«Skip Record If...»,«Skip Record If...». (1.18)旋转面«Skip Record If...»上的u -曲线称为纬线圆,v -曲线称为经线. 因为«Skip Record If...»,«Skip Record If...»,(,)r u v (,)r θϕ«Skip Record If...»,«Skip Record If...»,所以当«Skip Record If...»是正则曲线,并且«Skip Record If...»时,«Skip Record例1.4 正螺面(hericoid)设两条直线«Skip Record If...»和«Skip Record If...»垂直相交. 将直线«Skip Record If...»一方面绕«Skip Record If...»作匀速转动,同时沿«Skip Record If...»作匀速滑动,«Skip Record If...»的运动轨迹叫做正螺面(螺旋面). 取初始位置的直线«Skip Record If...»为x轴,«Skip Record If...»为z轴,建立右手直角坐标系. 则正螺面的参数方程为«Skip Record If...»,«Skip Record If...». (1.19) 由«Skip Record If...»,«Skip Record If...»,«Skip Record If...»可知正螺面是正则曲面.简单来说,直纹面就是由单参数直线族«Skip Record If...»构成的曲面.设«Skip Record If...» («Skip Record If...»)是一条空间正则曲线. 在«Skip RecordIf...»上对应于参数«Skip Record If...»的每一点有一条直线«Skip Record If...»,其方向向量为«Skip Record If...». 这条直线的参数方程可以写成«Skip Record If...».让«Skip Record If...»在区间«Skip Record If...»内变动,所有这些直线就拼成一个曲面«Skip Record If...»,称为直纹面. 它的参数方程为«Skip Record If...»,«Skip Record If...». (1.20)曲线«Skip Record If...»称为该直纹面的准线(directrix),而这个单参数直线族中的每一条直线«Skip Record If...»都称为直纹面的一条直母线(generating line),也就是直纹面«Skip Record If...»的«Skip Record If...»-曲线.为了保证直纹面的正则性,要求«Skip Record If...». (1.21)因为直母线的方向向量«Skip Record If...»,通过参数变换«Skip Record If...»,«Skip Record If...»,可设«Skip Record If...».再通过选取新的准线«Skip Record If...»,其中«Skip Record If...»是待定的函数,使得直母线处处与准线垂直相交,即«Skip Record If...». 因为«Skip Record If...»,只须取«Skip Record If...»即可.1. 当«Skip Record If...»为常向量时,所有的直母线互相平行,直纹面«SkipRecord If...»称为柱面(cylindrical surface).2. 当所有的直母线都经过一个定点时,直纹面«Skip Record If...»称为锥面(cone). ()a u ()a u3. 当«Skip Record If...»时,«Skip Record If...»称为切线曲面(tangent surface),由准线«Skip Record If...»的所有切线构成.这3种直纹面有共同的特征,在§3.6还要进一步讨论.课外作业:习题2,5§ 3.2 切平面和法线一、曲面的切空间,切平面和法线设«Skip Record If...»是«Skip Record If...»中一个正则曲面,«Skip Record If...»是曲面上点的曲纹坐标. 设«Skip Record If...»是«Skip Record If...»上任意一个固定点. 则«Skip Record If...»上过«Skip Record If...»点的一条可微(参数)曲线«Skip Record If...»可以表示为«Skip Record If...», (2.2)其中«Skip Record If...» (2.1)是«Skip Record If...»中一条可微曲线(不一定是正则曲线),满足«Skip Record If...»,«Skip Record If...». 因此«Skip Record If...»,正是«Skip Record If...»点的位置向量. 曲线«Skip Record If...»在«Skip Record If...»点的切向量为 定义2.1 曲面«Skip Record If...»上过«Skip Record If...»点的任意一条连续可微曲线在该点的切向量称为曲面«Skip Record If...»在«Skip Record If...»点的一个切向量(tangent vector).命题 曲面«Skip Record If...»在«Skip Record If...»点的切向量全体记为«Skip Record If...»,它是一个2维实向量空间,«Skip Record If...»是«Skip Record If...»的一个基. 事实上,«Skip Record If...»,称为曲面«Skip Record If...»在«Skip Record If...»点的切空间(tangent space).证明 记«Skip Record If...». 由(2.3)可见«Skip Record If...». 反之,对任意«Skip Record If...»,令«Skip Record If...». 则«Skip Record If...»是过«Skip Record If...»的可微曲线,并且 r x 00(,)r u v v =«Skip Record If...».所以«Skip Record If...». 因此«Skip Record If...»,从而«Skip Record If...».显然«Skip Record If...»按照向量的加法和数乘构成一个向量空间. 由于«SkipRecord If...»线性无关,它们构成«Skip Record If...»的基. □在空间«Skip Record If...»中,经过点«Skip Record If...»,以两个不共线向量«Skip Record If...»为方向向量的平面称为曲面«Skip Record If...»在«Skip Record If...»点的切平面(tangent plane). 切平面的参数方程为«Skip Record If...»,«Skip Record If...». (2.6)它的单位法向量(unit normal vector)为«Skip Record If...». (2.7)经过点«Skip Record If...»且垂直于«Skip Record If...»在«Skip Record If...»点的切平面的直线称为曲面«Skip Record If...»在«Skip Record If...»点的法线(normal line). 它的参数方程为«Skip Record If...»,«Skip Record If...». (2.8)曲面«Skip Record If...»在«Skip Record If...»点的切空间、切平面、法线这三个概念都是与参数选择无关的几何概念. (为什么?) 二、连续可微函数的等值面 设«Skip Record If...»是一个区域,«Skip Record If...»是定义在«Skip Record If...»上的连续可微函数. 对于一个常数«Skip Record If...»,集合«Skip Record If...»称为函数«Skip Record If...»的等值面. 如果在«Skip Record If...»的每一点,都有«Skip Record If...», (2.9)则等值面«Skip Record If...»是一个正则曲面. 事实上,设在«Skip Record If...»,有«Skip Record If...»,则方程«Skip Record If...» (2.10)在«Skip Record If...»点的邻近确定了一个隐函数«Skip Record If...»,使得«Skip Record If...»,«Skip Record If...».nu r vr于是等值面«Skip Record If...»局部地可以用参数方程表示为«Skip Record If...». (2.11) 由于«Skip Record If...»,等值面«Skip Record If...»是正则曲面.在等值面上每一点«Skip Record If...»,梯度向量«Skip Record If...»是一个法向量,即是与切平面垂直的向量.事实上,由(2.11)可得切空间的基底«Skip Record If...».由(2.10)两边分别对«Skip Record If...»求偏导数并注意«Skip Record If...»,得«Skip Record If...»,«Skip Record If...»,即有«Skip Record If...»,«Skip Record If...».三、微分«Skip Record If...»的几何意义设曲面«Skip Record If...»的参数方程为«Skip Record If...».微分得到«Skip Record If...». (2.13)将«Skip Record If...»看作4个独立的变量,则对于(2.13)中«Skip Record If...»的不同取值,就得到不同的切向量.有时也用比值«Skip Record If...»来表示曲面上的一个切方向.自然,这时要求«Skip Record If...»不能全为0.变量«Skip Record If...»是切向量«Skip Record If...»关于切空间«Skip Record If...»的基底«Skip Record If...»的分量,因此是向量空间«Skip Record If...»上的线性函数,即«Skip Record If...»(对偶空间). 事实上,按照定义«Skip Record If...».同理,«Skip Record If...».注. 由于切空间的自然基底«Skip Record If...»一般不是单位正交的,在把«Skip Record If...»看作切向量在这个基底下的分量计算内积时,不能将它当作笛卡尔坐标系下的分量来进行运算,而应当顾及自然基底«Skip Record If...»的度量系数(参看下一节).课外作业:习题1,3,5.§ 3.3 第一基本形式设«Skip Record If...»是«Skip Record If...»中一个正则参数曲面. 则«Skip Record If...» (3.1) 是曲面上任意一点«Skip Record If...»处的切向量,这个向量作为«Skip Record If...»中的向量可以计算它的长度. 令«Skip Record If...»,«Skip Record If...»,«Skip Record If...». (3.2) 这三个函数«Skip Record If...»称为曲面«Skip Record If...»的第一类基本量.而矩阵«Skip Record If...» (3.3) 称为切空间(关于基底«Skip Record If...»)的度量矩阵(metric matrix).由于«Skip Record If...»的度量是正定的,这是一个正定矩阵. 事实上,它的2个顺序主子式均«Skip Record If...»:«Skip Record If...»,«Skip Record If...». (Lagrange 恒等式)利用第一类基本量«Skip Record If...»的定义,有«Skip Record If...».这是一个关于变量«Skip Record If...»的二次型,称为曲面«Skip Record If...»的第一基本形式(first fundamental form),记为«Skip Record If...». (3.4) 对曲面«Skip Record If...»作可允许的参数变换«Skip Record If...»,«Skip Record If...», (3.5) 并记«Skip Record If...».则由微分形式的不变性得«Skip Record If...». (*)记参数变换(3.5)的Jacobi矩阵为«Skip Record If...». (3.10) 则有«Skip Record If...», (3.7, 3.9)«Skip Record If...». (3.8) 因此在新的参数«Skip Record If...»下,度量矩阵成为«Skip Record If...», (3.12) 从而第一类基本量之间的关系为«Skip Record If...» (3.13) 在新的参数«Skip Record If...»下,第一基本形式保持不变:«Skip Record If...».因此第一基本形式与参数选择无关,也与«Skip Record If...»的标架选择无关,是一个几何量. 其实,这一结论也可由微分形式不变性,也就是(*)式直接得到:«Skip Record If...».如果«Skip Record If...»和«Skip Record If...»是«Skip Record If...»处的两个切向量,则它们的内积为«Skip Record If...». (3.15) 因此切向量«Skip Record If...»的长度为«Skip Record If...». (3.16) 两个切向量«Skip Record If...»和«Skip Record If...»之间的夹角«Skip Record If...»满足«Skip Record If...». (3.17) 它们相互正交的充分必要条件是«Skip Record If...». (3.18) 定理3.1 在参数曲面«Skip Record If...»上,参数曲线网是正交曲线网«Skip Record If...». □对于参数曲面«Skip Record If...»上的一条曲线«Skip Record If...»,它的弧长为«Skip Record If...». (3.21) 定义称«Skip Record If...»为曲面«Skip Record If...», «Skip Record If...»的面积元素,称«Skip Record If...» (3.18) 为曲面«Skip Record If...»的面积.命题 曲面上曲线的弧长«Skip Record If...»,曲面的面积元素«Skip Record If...»以及曲面的面积«Skip Record If...»都是几何量. 证明 假设参数变换为«Skip Record If...»,其中«Skip Record If...».则在新参数«Skip Record If...»下,«Skip Record If...»的参数方程«Skip Record If...»与原参数方程«Skip Record If...»之间满足«Skip Record If...».1. 曲线的参数方程由«Skip Record If...»变成了«Skip Record If...».所以«Skip Record If...».2. 由(3.12)可见,在新参数«Skip Record If...»下,第一类基本量«Skip Record If...»满足«Skip Record If...».其中«Skip Record If...»是«Skip Record If...»的逆映射«Skip Record If...»的Jacobi 行列式. 另一方面根据二重积分的变量代换公式,«Skip Record If...».所以在新参数«Skip Record If...»下的面积元素«Skip Record If...».3. 根据二重积分的变量代换公式,有«Skip Record If...». □例1 求旋转面«Skip Record If...»的第一基本形式.解 «Skip Record If...»,«Skip Record If...».所以«Skip Record If...»,«Skip Record If...»,«Skip Record If...».这说明在旋转面上,经线和纬线构成正交曲线网. 第一基本形式为«Skip Record If...». (3.24)这说明在旋转面上经线(v -曲线)和纬线(u -曲线)构成正交参数曲线网. □例2 求曲面上参数曲线网的二等分角轨线的微分方程.解 设正则参数曲面«Skip Record If...»的第一基本形式是«Skip Record If...».再设二等分角轨线的切向量为1r r ϕ=1r 1D α«Skip Record If...».由题意,它与u-曲线的夹角要等于它与v-曲线的夹角,而u-曲线的切方向为«Skip Record If...»,v-曲线的切方向为«Skip Record If...»,所以«Skip Record If...».将«Skip Record If...»和«Skip Record If...»代入上式,得«Skip Record If...»,即«Skip Record If...».由于«Skip Record If...»,即«Skip Record If...»,所以上式可化简为«Skip Record If...», (3.25) 或等价地,参数曲线网的二等分角轨线的微分方程为«Skip Record If...».□注求解一阶常微分方程初值问题«Skip Record If...»,«Skip Record If...»(«Skip Record If...»)得到的解«Skip Record If...»是曲面«Skip Record If...»上过«Skip Record If...»点的一条曲线«Skip Record If...»,在«Skip Record If...»的每一点«Skip Record If...»,切方向«Skip Record If...»与该点处的两条参数曲线的切方向夹角相等.固定«Skip Record If...»,让初始条件«Skip Record If...»变动,就得到2族这样的曲线,它们就是参数曲线网的二等分角轨线.课外作业:习题2,5,8§ 3.4 曲面上正交参数曲线网的存在性在正交参数曲线网下,第一基本形式比较简单:«Skip Record If...».问题:曲面上是否存在正交参数曲线网?引理设«Skip Record If...»是定义在区域«Skip Record If...»上的连续可微的1次微分形式,且«Skip Record If...»处处不为零. 则对于任意一点«Skip Record If...»,«Skip Record If...»在«Skip Record If...»的某个邻域«Skip Record If...»内存在积分因子,即有定义在«Skip Record If...»上的非零连续可微函数«Skip Record If...»,使得«Skip Record If...»是某个定义在«Skip Record If...»上的连续可微函数«Skip Record If...»的全微分:«Skip Record If...».引理的证明见附录§1定理1.2.定理4.1假定在曲面«Skip Record If...»上有两个处处线性无关的、连续可微的切向量场«Skip Record If...», «Skip Record If...». 则对每一点«Skip Record If...»,必有«Skip Record If...»点的一个邻域«Skip Record If...»,使得在«Skip Record If...»上存在新的参数«Skip Record If...»,满足«Skip Record If...»,«Skip Record If...».分析:设«Skip Record If...»,«Skip Record If...». (4.2) 则由«Skip Record If...»线性无关可知«Skip Record If...». (4.3)如果这样的可允许参数变换«Skip Record If...»存在,则应有函数«Skip Record If...»使得«Skip Record If...»,«Skip Record If...», (4.5) 即有«Skip Record If...». (4.7) 在上述等式两边取逆矩阵得«Skip Record If...». (4.8) 因此逆参数变换«Skip Record If...»应满足«Skip Record If...» (4.9)定理4.1的证明:考虑两个1次微分形式«Skip Record If...»,«Skip Record If...». (4.10)由引理可知存在积分因子«Skip Record If...»使得«Skip Record If...»是全微分,即有函数«Skip Record If...»,«Skip Record If...»使得«Skip Record If...» (4.11) 由此可见«Skip Record If...». (4.12) 因为«Skip Record If...»,参数变换«Skip Record If...»是可允许的. 在新的参数«Skip Record If...»下,«Skip Record If...»同理有«Skip Record If...». □注满足条件的新参数仅是局部存在的,并且不能使得«Skip Record If...».定理4.2 在曲面«Skip Record If...»上每一点«Skip Record If...»,有«Skip Record If...»点的一个邻域«Skip Record If...»,使得在«Skip Record If...»上存在新的参数«Skip Record If...»,满足«Skip Record If...».证明. 取向量场«Skip Record If...». 则«Skip Record If...»线性无关,且«Skip Record If...». □注在曲面«Skip Record If...»上,令«Skip Record If...»,«Skip Record If...».则«Skip Record If...»是曲面上的单位正交切向量场,称为«Skip Record If...»的Schmidt正交化.课外作业:习题1,3§ 3.5 保长对应和保角对应一、曲面到曲面的连续可微映射设有两个曲面«Skip Record If...»和«Skip Record If...». 因为曲面上的点«Skip Record If...»与它的参数(曲纹坐标)是一一对应的,从曲面«Skip Record If...»到曲面«Skip Record If...»的映射«Skip Record If...»可以通过它们的参数表示出来,即有映射«Skip Record If...»使得«Skip Record If...»,或«Skip Record If...».«Skip Record If...» «Skip Record If...»«Skip Record If...» «Skip Record If...» «Skip Record If...»将映射«Skip Record If...»通过它们的参数用两个函数表示出来,则有«Skip Record If...» (5.1)如果(5.1)中的两个函数都是连续可微的,则称映射«Skip Record If...»是连续可微的. 这一概念在曲面的可允许参数变换下保持不变,因此与这两个曲面的参数取法无关.以下总假定映射«Skip Record If...»有足够的连续可微性.二、切映射设两个曲面«Skip Record If...»的参数方程分别为«Skip Record If...»和«Skip Record If...»,«Skip Record If...». 映射«Skip Record If...»是连续可微的,它的参数表示为«Skip Record If...»,其中«Skip Record If...». (5.1)’则对每一点«Skip Record If...»,可以通过下面的方法定义一个线性映射«Skip Record If...»,其中«Skip Record If...»«Skip Record If...»«Skip Record If...». (5.9)上面定义的映射«Skip Record If...»称为由连续可微映射«Skip Record If...»诱导的切映射. 由上面的定义可见切映射«Skip Record If...»把«Skip Record If...»映为«Skip Record If...».在(5.9)中令«Skip Record If...»,可知«Skip Record If...»在切映射«Skip Record If...»下的象是«Skip Record If...». (5.9)’由于每个切向量«Skip Record If...»都是«Skip Record If...»上的某一过«Skip Record If...»点的曲线«Skip Record If...»,«Skip Record If...» (5.2)在«Skip Record If...»点的切向量:«Skip Record If...»,其中«Skip Record If...»为«Skip Record If...»点的曲纹坐标,且«Skip Record If...»,«Skip Record If...»(见(2.3)式),切映射也可以用另一种方法来定义:«Skip Record If...»将«Skip Record If...»上的曲线«Skip Record If...»映为«Skip Record If...»上的曲线«Skip Record If...»,«Skip Record If...». (5.3)定义«Skip Record If...»为«Skip Record If...»在«Skip Record If...»处的切向量,即«Skip Record If...» (5.5)«Skip Record If...»«Skip Record If...». (5.4)在(5.3)’中分别取«Skip Record If...»和«Skip Record If...»,可得«Skip Record If...». (5.7)1D因此切映射«Skip Record If...»在自然基«Skip Record If...»下的矩阵恰好是映射«Skip Record If...»的Jacobi 矩阵. 由此可知在«Skip Record If...»点切映射«Skip Record If...»是线性同构,当且仅当在«Skip Record If...»点映射(5.1)’的Jacobi 行列式«Skip Record If...».定理5.1 设映射«Skip Record If...»是(3次以上)连续可微的. 如果在«Skip RecordIf...»点切映射«Skip Record If...»是线性同构,则分别有«Skip Record If...»点的邻域«Skip Record If...»和«Skip Record If...»点的邻域«Skip Record If...»,«Skip RecordIf...»,以及«Skip Record If...»上的参数系«Skip Record If...»和«Skip Record If...»,使得映射«Skip Record If...»的参数表示为«Skip Record If...»,其中«Skip Record If...». 这种参数系称为映射«Skip Record If...»的适用参数系.证明 设«Skip Record If...»的参数方程分别为«Skip Record If...»和«Skip RecordIf...»,«Skip Record If...»的参数表示为«Skip Record If...».由条件,«Skip Record If...». 设«Skip Record If...»点的曲纹坐标为«Skip Record If...»,«Skip Record If...»点的曲纹坐标为«Skip Record If...».由于«Skip Record If...»是连续的,存在«Skip Record If...»在«Skip Record If...»中的邻域«Skip Record If...»,使得在«Skip Record If...»上«Skip Record If...»,且在«Skip Record If...»上«Skip Record If...»有连续可微的反函数«Skip Record If...»,其中«Skip Record If...»是«Skip Record If...»在«Skip Record If...»中的邻域. 在«SkipRecord If...»上对曲面«Skip Record If...»作参数变换«Skip Record If...». 在«Skip Record If...»上对曲面«Skip Record If...»作参数变换«Skip Record If...». 则在新的参数下,«Skip Record If...»的参数表示为«Skip Record If...».«Skip Record If...» «Skip Record If...» «Skip Record If...» «Skip Record If...»«Skip Record If...» «Skip Record If...» «Skip Record If...» «SkipRecord If...»«Skip Record If...» «Skip Record If...» «Skip Record If...» «Skip Record If...» «Skip Record If...»三、保长对应(等距对应)设«Skip Record If...»是连续可微映射,«Skip Record If...»和«Skip Record If...»分别是«Skip Record If...»的曲纹坐标. «Skip Record If...»的参数表示为«Skip Record If...».因为«Skip Record If...»,对于曲面«Skip Record If...»上的任意一个二次微分式«Skip Record If...», (5.11)ψ1|U ϕ1Ωψ11(,)u v 22(,)(,)u v u v =我们可定义曲面«Skip Record If...»上的一个二次微分式«Skip Record If...», (5.12) 其中«Skip Record If...»,«Skip Record If...». (5.15) 其中«Skip Record If...»作为复合函数,是«Skip Record If...»的函数,即«Skip Record If...»«Skip Record If...»(5.13)«Skip Record If...»二次微分式«Skip Record If...»称为«Skip Record If...»上的二次微分式«Skip Record If...»经过映射«Skip Record If...»拉回(pull back)到«Skip Record If...»上的二次微分式.简单来说,«Skip Record If...»就是将«Skip Record If...»代入(5.11)右端而得.例曲面«Skip Record If...»上的第一基本形式«Skip Record If...»是一个二次微分式. 拉回到«Skip Record If...»上,«Skip Record If...»由于«Skip Record If...»,上式可以简单地写成«Skip Record If...» (*)定义5.1设映射«Skip Record If...»是3次以上连续可微的. 如果对每一点«Skip Record If...»,切映射«Skip Record If...»都保持切向量的长度,即«Skip Record If...»,«Skip Record If...»,«Skip Record If...».则称«Skip Record If...»是从«Skip Record If...»到«Skip Record If...»的保长对应(correspondence preserving length),或称等距对应(isometry).注1. 保持向量长度的线性映射一定保持内积,因此若«Skip Record If...»是等距对应,则有«Skip Record If...»,«Skip Record If...»,«Skip Record If...».反之,保持内积的线性映射也一定保持向量的长度.而且,保长对应也保持连续可微曲线的弧长,即有«Skip Record If...».注2. 保持内积的线性映射必定是线性同构. 因此对于保长对应«Skip Record If...»,在每一点«Skip Record If...»,切映射«Skip Record If...»都是线性同构,从而局部地«Skip Record If...»是微分同胚,存在适用参数系.由(5.9)’可知«Skip Record If...».利用(*)得到«Skip Record If...»,其中«Skip Record If...»是«Skip Record If...»的第一基本形式. 于是有定理5.2设映射«Skip Record If...»是3次以上连续可微的. 则«Skip Record If...»是等距对应的充分必要条件是。
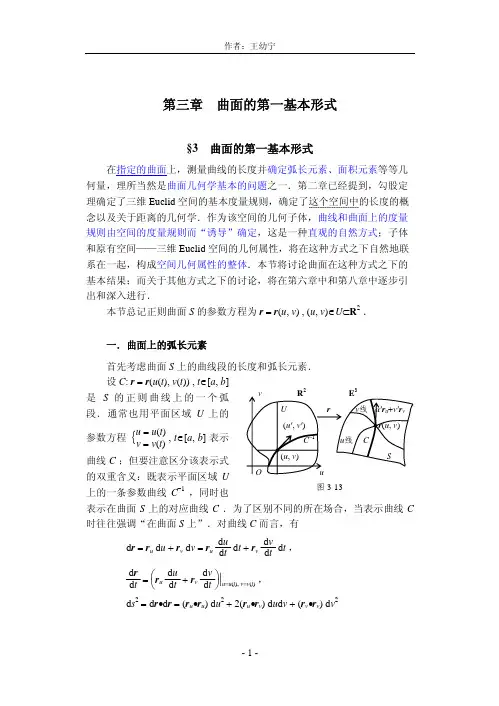
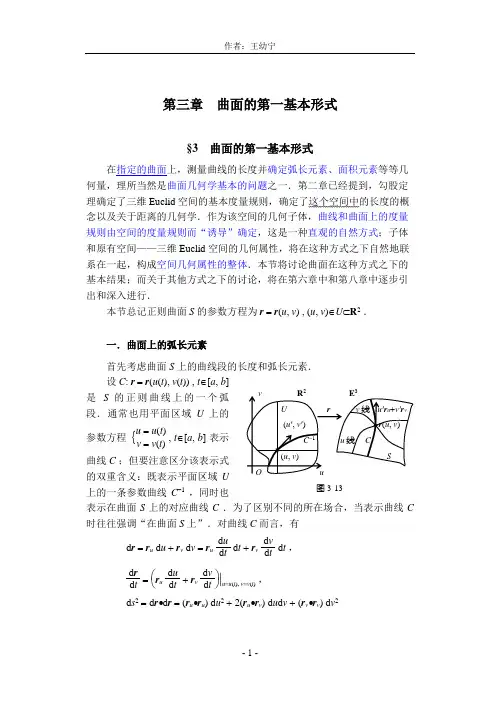
第三章 曲面的第一基本形式§3 曲面的第一基本形式在指定的曲面上,测量曲线的长度并确定弧长元素、面积元素等等几何量,理所当然是曲面几何学基本的问题之一.第二章已经提到,勾股定理确定了三维 Euclid 空间的基本度量规则,确定了这个空间中的长度的概念以及关于距离的几何学.作为该空间的几何子体,曲线和曲面上的度量规则由空间的度量规则而“诱导”确定,这是一种直观的自然方式;子体和原有空间——三维 Euclid 空间的几何属性,将在这种方式之下自然地联系在一起,构成空间几何属性的整体.本节将讨论曲面在这种方式之下的基本结果;而关于其他方式之下的讨论,将在第六章中和第八章中逐步引出和深入进行.本节总记正则曲面 S 的参数方程为 r = r (u , v ) , (u , v )∈U ⊂R 2 .一.曲面上的弧长元素首先考虑曲面 S 上的曲线段的长度和弧长元素.设 C : r = r (u (t ), v (t )) , t ∈[a , b ]是 S 的正则曲线上的一个弧段.通常也用平面区域 U 上的参数方程 {u = u (t )v = v (t ), t ∈[a , b ] 表示曲线 C ;但要注意区分该表示式的双重含义:既表示平面区域 U上的一条参数曲线 C −1 ,同时也表示在曲面 S 上的对应曲线 C .为了区别不同的所在场合,当表示曲线 C时往往强调“在曲面 S 上”.对曲线 C 而言,有23图3-13 d r = r u d u + r v d v = r u d u d t t + r v d v d t d t ,d r d t = ⎝⎛⎠⎞r u d u d t+ r v d v d t | u =u (t ), v =v (t ) , d s 2 = d r •d r = (r u •r u ) d u 2 + 2(r u •r v ) d u d v + (r v •r v ) d v 2= d r d t • d r d t d t 2 = [ |r u |2 ⎝⎛⎠⎞ d u d t 2 + 2(r u •r v ) ⎝⎛⎠⎞ d u d t d v d t + |r v |2 ⎝⎛⎠⎞ d v d t 2 ]d t 2 . 按照经常通用的记号,记曲面上的量(3.1) E = E (u , v ) = r u •r u = |r u |2 , F = F (u , v ) = r u •r v , G = G (u , v ) = r v •r v = |r v |2 ,则进一步对曲线 C 有d s 2 = d r •d r = [E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2 ]|u =u (t ), v =v (t ) = [E ⎝⎛⎠⎞ d u d t 2 + 2F ⎝⎛⎠⎞ d u d t d v d t + G ⎝⎛⎠⎞ d v d t 2 ]d t 2 , 此时取d s = | d r d t | d t =E ⎝⎛⎠⎞ d u d t 2 + 2F ⎝⎛⎠⎞ d u d t d v d t +G ⎝⎛⎠⎞ d v d t 2 | u =u (t ), v =v (t ) d t ,则有s (b ) − s (a ) = ∫b a d s d t d t = ∫b a | d r d t | d t = ∫b a E ⎝⎛⎠⎞ d u d t 2 + 2F ⎝⎛⎠⎞ d u d t d v d t + G ⎝⎛⎠⎞ d v d t 2 | u =u (t ), v =v (t ) d t .由此可见,使用平面区域 U 上的参数方程以及曲面的相应量,就可以得到曲面上的曲线的弧长元素和弧段长度;至于曲面及其上的曲线的位置向量如何,在上述算式中并不直接影响结果.曲面上的量对其上曲线的影响程度,将在进行进一步抽象之后,得到更明确的了解.对此应注意体会.二.第一基本形式定义1 对正则曲面 S : r = r (u , v ) , (u , v )∈U ⊂R 2 ,称二次微分式(3.2) Ⅰ = d s 2 = E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2为曲面 S 的第一基本形式,或称线素,其中系数由 (3.1) 式给出.注记: 曲面的第一基本形式系数也称为其第一基本量. 用进一步的几何语言来说,第一基本形式是由 E 3 的欧氏度量在曲面上所诱导出来的一种Riemann 度量.按照定义,曲面第一基本形式d s 2 = d r •d r 的几何意义可用逼近的观点解释为:切向微元 d r 是位置差向量 [r (u +d u , v +d v ) − r (u , v )] 的线性主部,而弧长元素 d s = |d r | 是相应两点之间的距离微元的主部(略去的是高阶无穷小).可证(留作习题)第一基本形式在容许参数变换下不变,且在刚体运动下不变;因而确实是曲面的几何量.从定义出发,第一基本形式的计算较为简单;但这是关于曲面的最基本和最重要的计算,一定要熟练掌握.下例展示了基本运算途径;同时,所得到的结论也是基本的.例1 已知平面 Π: r (u , v ) = r 0 + u a + v b ,其中三个常向量 r 0, a , b 满足规范条件 |a | = |b | = 1 , a •b = 0 .观察其第一基本形式的三种系数行为.① 平面 Π 的第一基本形式为d s 2 = d r •d r = (a d u + b d v )•(a d u + b d v ) = d u 2 + d v 2 .② 若在平面 Π 上采用极坐标系 (ρ, θ) ,即 {u = ρ cos θ v = ρ sin θ,则 r ρ = a cos θ + b sin θ ,r θ = (− a ρsin θ + b ρcos θ ) ;E (ρ, θ) = r ρ•r ρ = (a cos θ + b sin θ)•(a cos θ + b sin θ) = 1 ,F (ρ, θ) = r ρ•r θ = (a cos θ + b sin θ)•(− a ρsin θ + b ρcos θ) = 0 ,G (ρ, θ) = r θ•r θ = (− a ρsin θ + b ρcos θ)•(− a ρsin θ + b ρcos θ) = ρ2 ;此时,平面 Π 的第一基本形式(在极点无意义)为d s 2 = E (ρ, θ) d ρ2 + 2F (ρ, θ) d ρd θ + G (ρ, θ) d θ 2 = d ρ2 + ρ2 d θ 2 .③ 在平面 Π 上取任意一条无逗留点弧长 w 参数化曲线 C : ξ(w ) ,则其切线面r (w , t ) = ξ(w ) + t T (w ) 可表示一部分平面区域,其中 T 为 C 的单位切向.局部可得r w = T + t κ N ,r t = T ;E (w , t ) = r w •r w = (T + t κ N )•(T + t κ N ) = 1 + t 2κ 2 ,F (w , t ) = r w •r t = (T + t κ N )• T = 1 ,G (w , t ) = r t •r t = T • T = 1 ;此时,在平面 Π 上相应区域内,第一基本形式为d s 2 = E (w , t ) d w 2 + 2F (w , t ) d w d t + G (w , t ) d t 2= [1 + t 2κ 2(w )]d w 2 + 2d w d t + d t 2 .基于第一基本形式的不变性,需要注意,第一基本形式系数在容许参数变换下必须满足一定的变换规律.为了简便,可将第一基本形式 (3.2) 改写为形式矩阵,表示为(3.3) Ⅰ = d s 2 = (d u , d v ) ⎝⎛⎠⎞E F F G ⎝⎛⎠⎞d u d v ;相关各量分别表示为(3.4) d r = (d u , d v )⎝⎛⎠⎞r u r v, (3.5) d r •d r = (d u , d v )⎝⎛⎠⎞r u r v ⎝⎛⎠⎞r u r vT ⎝⎛⎠⎞d u d v , (3.6) ⎝⎛⎠⎞E F F G = ⎝⎛⎠⎞r u r v ⎝⎛⎠⎞r u r v T = ⎝⎛⎠⎞r u r v • (r u , r v ) ,其中各式之中的位置向量视为行向量,分块矩阵之间用“•”表示数量积.定义2 对正则曲面 S : r = r (u , v ) ,称二次型 (3.2) 或 (3.3) 的系数矩阵,即 (3.6) 式左端,为曲面 S 的第一基本形式系数矩阵;其行列式(3.7) E F F G = EG − F 2 = |r u |2|r v |2 − (r u •r v )2 = |r u ×r v |2 > 0 ,称为曲面 S 的第一基本形式系数行列式.性质 ① 正则曲面 S 的第一基本形式 (3.2) 是正定的二次型,即:d s 2 ≥ 0 ,且等号当且仅当 d u = d v = 0 时成立;② 正则曲面 S 的第一基本形式系数矩阵是正定的.这两条性质是等价的;它们的证明已经隐含在定义之中.下面具体考虑它们在容许参数变换下的行为.在容许参数变换 {u = u (u *, v *)v = v (u *, v *)下,记Jacobi 矩阵和Jacobi 行列式分别为(3.8) J = ⎝⎜⎛⎠⎟⎞∂u ∂u * ∂v ∂u *∂u ∂v * ∂v ∂v * ,∂(u , v ) ∂(u *, v *) = |J | ; 记参数 (u *, v *) 下曲面 S 的第一基本形式为d s 2 = E *(u *, v *) d u *2 + 2F *(u *, v *) d u *d v * + G *(u *, v *) d v *2 .则由 (1.6) 式和 (1.7) 式分别代入 (3.6) 式和 (3.7) 式可得(3.9) ⎝⎛⎠⎞E * F *F * G * = ⎝⎛⎠⎞ r u * r v * ⎝⎛⎠⎞ r u * r v *T= J ⎝⎛⎠⎞ r u r v ⎝⎛⎠⎞ r u r vT J T = J ⎝⎛⎠⎞E F F G J T , (3.10) E *G * − F *2 = |J |2(EG − F 2) .这是两个具有理论意义的等式.第一个等式说明,第一基本形式系数矩阵服从所谓“张量”的变换规律,从而成为张量概念(将在后续几何或代数课程中出现)的直观背景之一.第二个等式将在下一段用来支持面积元素的概念,等价地写为(3.11) E*G* −F*2=||J||EG−F2.例2以平面弧长参数曲线为准线作柱面S,考察其第一基本形式;并证明其第一基本形式在某正则参数 (u, v) 下可以表示为 d s2= d u2+ d v2.解:平面弧长参数曲线设为C: a(s*) ,设S: r(s*, v) =a(s*) +v l , l= const. , |l|= 1 .则其第一基本形式为d s2=|d r|2=|a′(s*) d s* +l d v|2= d s*2+ 2[a′(s*)•l] d s*d v+ d v2.当直纹与准线C所在平面垂直时,a′(s*)•l≡ 0 ,则令 (u, v) = (s*, v) ,便可满足要求.当直纹与准线C所在平面不垂直时,可选取新的平面弧长参数曲线使直纹与新准线所在平面垂直(想想理由并自行给出解析论证),故可转化为上一种情形.三.交角与面积元素作为应用,下面考虑如何利用曲面的第一基本形式,以确定交角和面积等几何量.对于不同的曲线或曲面,它们在公共点的交角总是指它们在该点处的切线或切平面之间的夹角,而有向交角通常是指它们在该点处的单位切向或有向切平面之间的有向夹角.在自然标架下,有关曲面以及其上曲线的交角问题和面积问题,都可以利用自然基向量的数量积或向量积进行计算,从而转化为如何用第一基本形式表述或求解的问题.一般化的算法,体现在下面的较为具体的抽象计算过程中;而计算结果的意义,需要特别注意体会.1.曲面上的曲线的交角假设曲面S的第一基本形式以 (3.2) 式确定;曲面S上的两条曲线C i: {u=u i(t i)v=v i(t i)相交于点P0: r(u0, v0) ,(u0, v0) = (u i(t i0), v i(t i0)) ,i= 1, 2 .C i在点P0处的自然切向为r u(u0, v0) u i′(t i0) +r v(u0, v0) v i′(t i0) .简记a i= u i′(t i0) ,b i= v i′(t i0) ,E0=E(u0, v0) , F0=F(u0, v0) , G0=G(u0, v0) .则C i在点P0处的交角θ0的余弦确定为r u(u0, v0) u1′(t10) +r v(u0, v0) v1′(t10) |r u(u0, v0) u1′(t10) +r v(u0, v0) v1′(t10)|•r u(u0, v0) u2′(t20) +r v(u0, v0) v2′(t20) |r u(u0, v0) u2′(t20) +r v(u0, v0) v2′(t20)|=a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0a12E0+ 2a1b1F0+ b12G0a22E0+ 2a2b2F0+ b22G0.利用微分形式的不变性,可知(d u i : d v i )|u i= u i(t i) , v i= v i(t i) ; t i=t i0=u i′(t i0) : v i′(t i0) =a i : b i,从而 cosθ0确定为E d u1d u2+F(d u1d v2+ d v1d u2) + G d v1d v2E d u12+ 2F d u1d v1+G d v12E d u22+ 2F d u2d v2+ G d v22|u i= u i(t i) , v i= v i(t i) ; t i=t i0.此式自然推广到一般切方向之上;即,设点(u, v) 处的两个切向微元在自然基 {r u, r v} 下分别为 d u:d v和δu:δv,则其间夹角余弦确定为(3.12) cosθ=E d uδu+F(d uδv+ d vδu) + G d vδvE d u2+ 2F d u d v+G d v2Eδu2+ 2Fδuδv+ Gδv2.该式表明:曲面上的曲线的交角,由曲面的第一基本形式以及曲线在交点处的切方向完全确定;而曲线的切方向只由参数区域上的原像即可确定.此处要注意,参数区域上的曲线原像之间的交角取决于区域本身,而与曲面上的交角没有必然的联系.可参考图3-13观察这个事实.将 (3.12) 式用于坐标曲线族,将得到有价值的推论,列为如下定理.定理1对正则曲面而言,两族坐标曲线处处正交的充要条件为其第一基本形式系数矩阵处处是对角阵.证明(从自然切向的数量积出发,直接易证;下述过程是为了帮助理解 (3.12) 式) 在本节通用记号下,两族坐标曲线的切线分别为 1:0 和0:1 ,代入 (3.12) 式即得坐标曲线夹角余弦cosθ=FEG;从而两族坐标曲线处处正交的充要条件为F≡ 0 ,即得结论.定义2对正则曲面S: r=r(u, v) ,若两族坐标曲线处处正交,则称参数(u, v) 为曲面S的一组正交参数,同时称这两族坐标曲线构成曲面S的一组正交参数网或正交网.定理1确定了曲面正交参数网的第一基本形式特征.在计算问题中,简短的第一基本形式显然会带来许多方便;因此,正交参数无疑是曲面上的一种较好的参数.关于曲面上较“好”参数(不一定正交)的讨论,将在 §5 以及第四章和第六章中多处出现.例3对正则曲面S: r=r(u, v) ,求两族坐标曲线的二等分角轨线C的微分方程.解:对于两族坐标曲线的自然切向r u和r v,二等分角向量场为r u |r u|±r v|r v|=r uE±r vG.故轨线C的切向微元r u d u+r v d v处处与该向量场平行,即沿C有d u:d v=1E:±1G,从而所求微分方程为E d u±G d v= 0 .例4已知正则曲面S: r=r(u, v) 的第一基本形式确定为 (3.2) 式.设微分方程α(u, v) d u2+ 2β(u, v) d u d v+γ(u, v) d v2= 0 在定义区域内过点 (u0, v0)有且仅有不相切的正则解曲线Γi: {u=u i(t i)v=v i(t i),i= 1, 2 ;两条曲面S上的曲线C i: {u=u i(t i)v=v i(t i)相交于点P0: r(u0, v0) .试证:两条曲线C i正交于点P0的充要条件为(Eγ− 2Fβ+Gα)|(u, v) = (u0, v0)= 0 .证明:记α0=α(u0, v0) , β0=β(u0, v0) ,γ0=γ(u0, v0) .记两条曲线C i在点 (u0, v0) 处的两个切向微元分别为a i : b i,则由正则性可知a i2+b i2≠ 0 ;由微分方程可知α0 a i2+ 2β0a i b i+γ0b i2= 0 .而由 (3.12) 式,C i之间正交条件写为a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0= 0 .以下分两种情形讨论.情形①:α0=γ0= 0 ,则β0≠ 0 ;否则过点 (u0, v0) 的正则曲线都是解曲线,而与已知矛盾.此时,由微分方程知a i b i= 0 ,故只能有两组解{a1= 0, b1≠ 0 ,a2≠ 0 , b2= 0 ;或{b1= 0 , a1≠ 0 ,b2≠ 0 , a2= 0 ;对应正交条件等价化为F0= 0 ,即为所论条件.情形②:α0和γ0不同时为 0 ,不妨设α0≠ 0 ;则由微分方程可知,必有b i≠ 0 ;此时,不妨规范为b i= 1 ,则方程转化为α0 a i2+ 2β0a i+γ0= 0 .此时,由一元二次方程系数的性质,得知a1+a2=−2β0α0,a1a2=γ0α0,从而a 1a 2E 0 + (a 1b 2 + b 1a 2)F 0 + b 1b 2G 0 = a 1a 2E 0 + (a 1 + a 2)F 0 + G 0= γ0 α0 E 0 + −2β0 α0F 0 +G 0 = 1 α0 (γ0E 0 −2β0F 0 + α0G 0) . 此式说明所论条件为充要条件.以上情形是完全分类,故结论得证.2.曲面的面积元素和区域面积现考虑曲面 S 的面积在已知第一基本形式之时的求解问题.在参数区域 U 内,任取矩形使其分别以点 (u , v ), (u +d u , v ),(u , v +d v ), (u +d u , v +d v ) 为顶点,则在曲面 S 上对应形成以点 P 1:(u , v ), P 2: (u +d u , v ), P 3: (u , v +d v ),P 4: (u +d u , v +d v ) 为顶点的坐标曲线四边形.按照微积分理论,在略去更高阶无穷小量时,该曲边四边形的面积就等于直边三角形 P 1P 2P 3 面积的二倍,从而就等于由向量 P 1P 2 和 P 1P 3 所张成的平行四边形的面积.而在略去更高阶无穷小量时,图3-14P 1P 2×P 1P 3 = [r (u +d u , v ) − r (u , v )]×[r (u , v +d v ) − r (u , v )]≈ [r u (u , v )d u ]×[r v (u , v )d v ] = EG − F 2 d u d v n (u , v ) ,故曲面的面积元素可以表示为(3.13) d σ = |r u ×r v | d u d v = EG − F 2 d u d v ,其中第二个等号是根据 (3.7) 式.进而,曲面上任一有界区域 r (U 0) 的面积 A (U 0) 可以表示为(3.14) A (U 0) = ∫∫ U 0 d σ = ∫∫ U 0 |r u ×r v | d u d v = ∫∫ U 0EG − F 2 d u d v . 在参数变换下,根据 (3.8) 和 (3.10) 式以及二重积分的变量代换公式,易知面积元素对应相同,面积也对应相同;这与几何属性是相容的.以上结果的核心,列为如下定理.定理2 正则曲面的面积元素和区域面积由第一基本形式可完全确定.习 题⒈ 证明正则曲面的第一基本形式在容许参数变换下不变.⒉ 证明正则曲面的第一基本形式在 E 3 的正交标架变换下不变.⒊ 试求下列曲面的第一基本形式:① 单位球面 r (u , v ) = (2u u 2 + v 2 + 1 , 2v u 2 + v 2 + 1 , u 2 + v 2 − 1 u 2 + v 2 + 1) ; ② 悬链面 r (u , t ) = (t , cos u ch t , sin u ch t ) .⒋ 在螺面 r = (u cos v , u sin v , ln cos u + v ) 上,试证:每两条螺线(v 线)在任一 u 曲线上截取等长的曲线段.⒌ 球面上的斜驶线是指与经线交成定角的轨线,试在经纬参数化下确定其微分方程.⒍ 已知正则曲面 S : r (u , v ) 之上有两族正则曲线 ϕ( u , v ) = a 和 ψ( u , v ) = b ,其中a 和b与 (u , v ) 无关.试证:它们互相正交的充要条件为E ϕv ψv −F (ϕu ψv + ϕv ψu ) +G ϕu ψu = 0 .⒎ 已知曲面的第一基本形式为 d s 2 = d u 2 + (u 2 + 4) d v 2 .试求:① 其上两条曲线 C 1: u + v = 0 与 C 2: u − v = 0 的交角;② 其上三条曲线 C 1: u = v 2 , C 2: u = − v 2 与 C 3: v = 1 所围成的曲边三角形的边长和各个内角;③ 其上三条曲线 C 1: u = v , C 2: u = − v 与 C 3: v = 1 所围成的曲边三角形的面积.。
第三章 参数多项式的插值与逼近2009年8月29日10时35分 1本章内容•几何不变性与参数变换•参数多项式插值与逼近的基本概念•参数多项式插值曲线与逼近曲线•张量积曲面•参数双三次曲面片2009年8月29日10时35分 22009年8月29日10时35分 3第一节 几何不变性和参数变换 • 一、几何不变性:1、定义:指曲线曲面不依赖于坐标系的 选择,或者说在旋转与平移变化下不变 的性质。
2、曲线曲面的基表示: 0 n i i i P a j = = å r r 其中: 为矢量系数,修改它可以改变曲线曲面的形状i a r i j 为单参数(表示曲线时)或双参数(表示曲面时) 的基函数,决定曲线曲面的几何性质2009年8月29日10时35分 43、基表示的分类:(1)规范基表示:即满足Cauchy 条件 也称权性。
这种表示下,曲线 (面)上的点是矢量系数的一个重心组 合,重心坐标是基函数。
其中 一、几何不变性:0 1n i i j = º å 我们常见的线性插值就是一种规范基表示。
(2)部分规范基表示:即满足 0 1,0 ki i k n j = º£< å 如: 01 () p u a a u =+ r r r 0 1j =一、几何不变性:(3)非规范基表示:除规范基表示和部分规范基表示以外的其它基表示。
4、基表示与几何不变性的关系:曲线曲面的规范基表示具有仿射不变性, 其余两种只具有几何不变性。
5、几何不变性的意义: (1)方便局部坐标与整体坐标之间的转换;(2)便于平移和旋转变换;(3)节省了计算量。
2009年8月29日10时35分 5• 1、概述• 曲线的参数域总是有界的。
• 曲线的参数可能有某种几何意义,也可能没有。
• 曲线的参数化:即确定曲线上的点与参数域中的参数值之间的一种对应关系。
• 这种对应关系可以是一一对应的,也可以不是一一对应的,后者称为奇点(Singularpoint),如曲线的自交点。

第三章 曲面的第二基本形式§3.1第二基本形式1、设下列曲面的第二基本形式:(1))sin ,sin cos ,cos cos (ϕθϕθϕb a a r = (2)+=)(21,,22v u v u r (3))2),(),((uv v u a v u a r −+=2、求曲线r =r (s )的切线面的第二基本形式,其中s 是曲线的弧长参数。
3、求曲面),(y x f z =的第一、第二基本形式。
4、证明:当曲面在空间E 3中作刚体运动时,它的第一基本形式和第二基本形式是不变的。
5、直接证明:如果在可展曲面S 上存在两个不同的单参数直线族,则S 必定是平面(本题同时说明了在非平面的可展曲面上不可能存在两个不同的单参数直线族)。
§3.2 法曲率1、设悬链面的方程为))ln(,sin ,cos (222222a u u a v a u v a u r ++++=求它的第一基本形式和第二基本形式,并求它在点(0,0),沿切向量dr =2r u +r v 的法曲率。
2、证明:曲面上一条曲线在任意一点的法曲率等于该曲线在该点、由其切向量决定的法截面上的投影曲线在该点的相对曲率。
3、求下列曲面上的渐近曲线:(1)正螺旋面:),sin ,cos (bv v u v u r =(2)双曲抛物面:−+=2,2,2uv v u v u r 4、设C 是曲面上一条非直线的渐近曲线,其参数方程为u =u (s ),v =v (s ),其中s 为弧长参数。
证明:C 的挠率等于N M L G F E u v u v F EG 222)()(1&&&&−−=τ 5、设n 是正整数,则)||,sin ,cos (n n t signt t r t r ⋅=α落在圆柱面x 2+y 2=r 2上,试求曲线n α在t =0处的法曲率。
验证:当n ≥2时,曲线n α在t =0处的曲率中心在一个圆周上。
![微分几何(第三版)【梅向明_黄敬之_编】第三章课后题答案[1]](https://uimg.taocdn.com/ec2031ed524de518974b7d0c.webp)
§4.直纹面和可展曲面1. 证明曲面r =}32,2,31{2432v u u uv u v u +++是可展曲面.证法一: 已知曲面方程可改写为r =},2,{432u u u +v }32,,31{2u u ,令()a u =},2,{432u u u ,()b u =}32,,31{2u u ,则r =()a u + v ()b u ,且()b u ≠0,这是直纹面的方程 ,它满足(',,')a b b =23226412334013u u u u u u =0 ,所以所给曲面为可展曲面。
证法二:证明曲面的高斯曲率为零。
(略)2。
证明曲面r={cosv-(u+v)sinv, sinv+(u+v)cosv,u+2v}是可展曲面。
证法一: 曲面的方程可改写为 r=()a v + u ()b v ,其中()a v ={cosv-vsinv,sinv+vcosv, 2v},()b v ={-sinv, cosv,1} ,易见()b v ≠0,所以曲面为直纹面,又因为(',,')a b b =2sin cos 2cos sin 2sin cos 1cos sin 0v v v v v v v v vv ------=0,所以所给曲面为可展曲面。
证法二:证明曲面的高斯曲率为零。
(略)3.证明正螺面r={vcosu,vsinu,au+b}(a ≠0)不是可展曲面。
证法一:原曲面的方程可改写为r=()a u + v ()b u ,其中()a u ={0,0,au+b},()b u ={cosu,sinu,0}.易见()b u ≠0, 所以曲面为直纹面,又因为(',,')a b b =00cos sin 0sin cos 0au u u u -=a ≠0.故正螺面不是可展曲面。
证法二:证明曲面的高斯曲率为零。
(略)4.证明挠曲线的主法线曲面与副法线曲面不是可展曲面。
第三章 曲面的第一基本形式§3 曲面的第一基本形式在指定的曲面上,测量曲线的长度并确定弧长元素、面积元素等等几何量,理所当然是曲面几何学基本的问题之一.第二章已经提到,勾股定理确定了三维 Euclid 空间的基本度量规则,确定了这个空间中的长度的概念以及关于距离的几何学.作为该空间的几何子体,曲线和曲面上的度量规则由空间的度量规则而“诱导”确定,这是一种直观的自然方式;子体和原有空间——三维 Euclid 空间的几何属性,将在这种方式之下自然地联系在一起,构成空间几何属性的整体.本节将讨论曲面在这种方式之下的基本结果;而关于其他方式之下的讨论,将在第六章中和第八章中逐步引出和深入进行.本节总记正则曲面 S 的参数方程为 r = r (u , v ) , (u , v )∈U ⊂R 2 .一.曲面上的弧长元素首先考虑曲面 S 上的曲线段的长度和弧长元素.设 C : r = r (u (t ), v (t )) , t ∈[a , b ]是 S 的正则曲线上的一个弧段.通常也用平面区域 U 上的参数方程 {u = u (t )v = v (t ), t ∈[a , b ] 表示曲线 C ;但要注意区分该表示式的双重含义:既表示平面区域 U上的一条参数曲线 C -1 ,同时也表示在曲面 S 上的对应曲线 C .为了区别不同的所在场合,当表示曲线 C时往往强调“在曲面 S 上”.对曲线 C 而言,有d r = r u d u + r v d v = r u d u d t d t + r v d v d td t , d r d t = ⎝⎛⎭⎫r u d u d t + r v d v d t | u =u (t ), v =v (t ) , d s 2 = d r •d r = (r u •r u ) d u 2 + 2(r u •r v ) d u d v + (r v •r v ) d v 2图3-13= d r d t • d r d t d t 2 = [ |r u |2 ⎝⎛⎭⎫ d u d t 2 + 2(r u •r v ) ⎝⎛⎭⎫ d u d t d v d t + |r v |2 ⎝⎛⎭⎫ d v d t 2 ]d t 2 . 按照经常通用的记号,记曲面上的量(3.1) E = E (u , v ) = r u •r u = |r u |2 , F = F (u , v ) = r u •r v , G = G (u , v ) = r v •r v = |r v |2 ,则进一步对曲线 C 有d s 2 = d r •d r = [E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2 ]|u =u (t ), v =v (t ) = [E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 ]d t 2 , 此时取 d s = |d r d t| d t = E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 | u =u (t ), v =v (t ) d t , 则有 s (b ) - s (a ) = ⎰b ad s d t d t = ⎰b a | d r d t | d t = ⎰b a E ⎝⎛⎭⎫ d u d t 2 + 2F ⎝⎛⎭⎫ d u d t d v d t + G ⎝⎛⎭⎫ d v d t 2 | u =u (t ), v =v (t ) d t .由此可见,使用平面区域 U 上的参数方程以及曲面的相应量,就可以得到曲面上的曲线的弧长元素和弧段长度;至于曲面及其上的曲线的位置向量如何,在上述算式中并不直接影响结果.曲面上的量对其上曲线的影响程度,将在进行进一步抽象之后,得到更明确的了解.对此应注意体会.二.第一基本形式定义1 对正则曲面 S : r = r (u , v ) , (u , v )∈U ⊂R 2 ,称二次微分式(3.2) Ⅰ = d s 2 = E (u , v ) d u 2 + 2F (u , v ) d u d v + G (u , v ) d v 2为曲面 S 的第一基本形式,或称线素,其中系数由 (3.1) 式给出.注记: 曲面的第一基本形式系数也称为其第一基本量. 用进一步的几何语言来说,第一基本形式是由 E 3 的欧氏度量在曲面上所诱导出来的一种Riemann 度量.按照定义,曲面第一基本形式d s 2 = d r •d r 的几何意义可用逼近的观点解释为:切向微元 d r 是位置差向量 [r (u +d u , v +d v ) - r (u , v )] 的线性主部,而弧长元素 d s = |d r | 是相应两点之间的距离微元的主部(略去的是高阶无穷小).可证(留作习题)第一基本形式在容许参数变换下不变,且在刚体运动下不变;因而确实是曲面的几何量.从定义出发,第一基本形式的计算较为简单;但这是关于曲面的最基本和最重要的计算,一定要熟练掌握.下例展示了基本运算途径;同时,所得到的结论也是基本的.例1 已知平面 ∏: r (u , v ) = r 0 + u a + v b ,其中三个常向量 r 0, a , b 满足规范条件 |a | = |b | = 1 , a •b = 0 .观察其第一基本形式的三种系数行为.① 平面 ∏ 的第一基本形式为d s 2 = d r •d r = (a d u + b d v )•(a d u + b d v ) = d u 2 + d v 2 .② 若在平面 ∏ 上采用极坐标系 (ρ, θ) ,即 {u = ρ cos θ v = ρ sin θ,则 r ρ = a cos θ + b sin θ ,r θ = (- a ρsin θ + b ρcos θ ) ;E (ρ, θ) = r ρ•r ρ = (a cos θ + b sin θ)•(a cos θ + b sin θ) = 1 ,F (ρ, θ) = r ρ•r θ = (a cos θ + b sin θ)•(- a ρsin θ + b ρcos θ) = 0 ,G (ρ, θ) = r θ•r θ = (- a ρsin θ + b ρcos θ)•(- a ρsin θ + b ρcos θ) = ρ2 ;此时,平面 ∏ 的第一基本形式(在极点无意义)为d s 2 = E (ρ, θ) d ρ2 + 2F (ρ, θ) d ρd θ + G (ρ, θ) d θ 2 = d ρ2 + ρ2 d θ 2 .③ 在平面 ∏ 上取任意一条无逗留点弧长 w 参数化曲线 C : ξ(w ) ,则其切线面r (w , t ) = ξ(w ) + t T (w ) 可表示一部分平面区域,其中 T 为 C 的单位切向.局部可得r w = T + t κ N ,r t = T ;E (w , t ) = r w •r w = (T + t κ N )•(T + t κ N ) = 1 + t 2κ 2 ,F (w , t ) = r w •r t = (T + t κ N )• T = 1 ,G (w , t ) = r t •r t = T • T = 1 ;此时,在平面 ∏ 上相应区域内,第一基本形式为d s 2 = E (w , t ) d w 2 + 2F (w , t ) d w d t + G (w , t ) d t 2= [1 + t 2κ 2(w )]d w 2 + 2d w d t + d t 2 .基于第一基本形式的不变性,需要注意,第一基本形式系数在容许参数变换下必须满足一定的变换规律.为了简便,可将第一基本形式 (3.2) 改写为形式矩阵,表示为(3.3) Ⅰ = d s 2 = (d u , d v ) ⎝⎛⎭⎫E F F G ⎝⎛⎭⎫d u d v ;相关各量分别表示为(3.4) d r = (d u , d v )⎝⎛⎭⎫r u r v ,(3.5) d r •d r = (d u , d v )⎝⎛⎭⎫r u r v ⎝⎛⎭⎫r u r v T ⎝⎛⎭⎫d u d v ,(3.6) ⎝⎛⎭⎫E F F G = ⎝⎛⎭⎫r u r v ⎝⎛⎭⎫r u r v T = ⎝⎛⎭⎫r u r v • (r u , r v ) ,其中各式之中的位置向量视为行向量,分块矩阵之间用“•”表示数量积.定义2 对正则曲面 S : r = r (u , v ) ,称二次型 (3.2) 或 (3.3) 的系数矩阵,即 (3.6) 式左端,为曲面 S 的第一基本形式系数矩阵;其行列式(3.7) E F F G = EG - F 2 = |r u |2|r v |2 - (r u •r v )2 = |r u ⨯r v |2 > 0 ,称为曲面 S 的第一基本形式系数行列式.性质 ① 正则曲面 S 的第一基本形式 (3.2) 是正定的二次型,即:d s 2 ≥ 0 ,且等号当且仅当 d u = d v = 0 时成立;② 正则曲面 S 的第一基本形式系数矩阵是正定的.这两条性质是等价的;它们的证明已经隐含在定义之中.下面具体考虑它们在容许参数变换下的行为.在容许参数变换 {u = u (u *, v *)v = v (u *, v *)下,记Jacobi 矩阵和Jacobi 行列式分别为(3.8) J = ⎝ ⎛⎭⎪⎫∂u ∂u * ∂v ∂u *∂u ∂v * ∂v ∂v * ,∂(u , v ) ∂(u *, v *) = |J | ; 记参数 (u *, v *) 下曲面 S 的第一基本形式为d s 2 = E *(u *, v *) d u *2 + 2F *(u *, v *) d u *d v * + G *(u *, v *) d v *2 .则由 (1.6) 式和 (1.7) 式分别代入 (3.6) 式和 (3.7) 式可得(3.9) ⎝⎛⎭⎫E * F *F * G * = ⎝⎛⎭⎫ r u * r v * ⎝⎛⎭⎫ r u * r v *T= J ⎝⎛⎭⎫ r u r v ⎝⎛⎭⎫ r u r vT J T = J ⎝⎛⎭⎫E F F G J T , (3.10) E *G * - F *2 = |J |2(EG - F 2) .这是两个具有理论意义的等式.第一个等式说明,第一基本形式系数矩阵服从所谓“张量”的变换规律,从而成为张量概念(将在后续几何或代数课程中出现)的直观背景之一.第二个等式将在下一段用来支持面积元素的概念,等价地写为(3.11) E*G* -F*2=||J||EG-F2.例2以平面弧长参数曲线为准线作柱面S,考察其第一基本形式;并证明其第一基本形式在某正则参数 (u, v) 下可以表示为 d s2= d u2+ d v2.解:平面弧长参数曲线设为C: a(s*) ,设S: r(s*, v) =a(s*) +v l, l= const. , |l|= 1 .则其第一基本形式为d s2=|d r|2=|a'(s*) d s* +l d v|2= d s*2+ 2[a'(s*)•l] d s*d v+ d v2.当直纹与准线C所在平面垂直时,a'(s*)•l≡ 0 ,则令 (u, v) = (s*, v) ,便可满足要求.当直纹与准线C所在平面不垂直时,可选取新的平面弧长参数曲线使直纹与新准线所在平面垂直(想想理由并自行给出解析论证),故可转化为上一种情形.三.交角与面积元素作为应用,下面考虑如何利用曲面的第一基本形式,以确定交角和面积等几何量.对于不同的曲线或曲面,它们在公共点的交角总是指它们在该点处的切线或切平面之间的夹角,而有向交角通常是指它们在该点处的单位切向或有向切平面之间的有向夹角.在自然标架下,有关曲面以及其上曲线的交角问题和面积问题,都可以利用自然基向量的数量积或向量积进行计算,从而转化为如何用第一基本形式表述或求解的问题.一般化的算法,体现在下面的较为具体的抽象计算过程中;而计算结果的意义,需要特别注意体会.1.曲面上的曲线的交角假设曲面S的第一基本形式以 (3.2) 式确定;曲面S上的两条曲线C i: {u=u i(t i)相交于点P0: r(u0, v0) ,(u0, v0) = (u i(t i0), v i(t i0)) ,i= 1, 2 .C i在点v=v i(t i)P0处的自然切向为r u(u0, v0) u i'(t i0) +r v(u0, v0) v i'(t i0) .简记a i= u i'(t i0) ,b i= v i'(t i0) ,E0=E(u0, v0) , F0=F(u0, v0) , G0=G(u0, v0) .则C i在点P0处的交角θ0的余弦确定为r u(u0, v0) u1'(t10) +r v(u0, v0) v1'(t10) |r u(u0, v0) u1'(t10) +r v(u0, v0) v1'(t10)|•r u(u0, v0) u2'(t20) +r v(u0, v0) v2'(t20) |r u(u0, v0) u2'(t20) +r v(u0, v0) v2'(t20)|=a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0a12E0+ 2a1b1F0+ b12G0a22E0+ 2a2b2F0+ b22G0.利用微分形式的不变性,可知(d u i : d v i )|u i= u i(t i) , v i= v i(t i) ; t i=t i0=u i'(t i0) : v i'(t i0) =a i : b i,从而 cosθ0确定为E d u1d u2+F(d u1d v2+ d v1d u2) + G d v1d v2E d u12+ 2F d u1d v1+G d v12E d u22+ 2F d u2d v2+ G d v22|u i= u i(t i) , v i= v i(t i) ; t i=t i0.此式自然推广到一般切方向之上;即,设点(u, v) 处的两个切向微元在自然基 {r u, r v} 下分别为 d u:d v和δu:δv,则其间夹角余弦确定为(3.12) cosθ=E d uδu+F(d uδv+ d vδu) + G d vδvE d u2+ 2F d u d v+G d v2Eδu2+ 2Fδuδv+ Gδv2.该式表明:曲面上的曲线的交角,由曲面的第一基本形式以及曲线在交点处的切方向完全确定;而曲线的切方向只由参数区域上的原像即可确定.此处要注意,参数区域上的曲线原像之间的交角取决于区域本身,而与曲面上的交角没有必然的联系.可参考图3-13观察这个事实.将(3.12) 式用于坐标曲线族,将得到有价值的推论,列为如下定理.定理1对正则曲面而言,两族坐标曲线处处正交的充要条件为其第一基本形式系数矩阵处处是对角阵.证明(从自然切向的数量积出发,直接易证;下述过程是为了帮助理解(3.12) 式)在本节通用记号下,两族坐标曲线的切线分别为1:0 和0:1 ,代入 (3.12) 式即得坐标曲线夹角余弦cosθ=FEG;从而两族坐标曲线处处正交的充要条件为F≡ 0 ,即得结论.定义2对正则曲面S: r=r(u, v) ,若两族坐标曲线处处正交,则称参数(u, v) 为曲面S的一组正交参数,同时称这两族坐标曲线构成曲面S的一组正交参数网或正交网.定理1确定了曲面正交参数网的第一基本形式特征.在计算问题中,简短的第一基本形式显然会带来许多方便;因此,正交参数无疑是曲面上的一种较好的参数.关于曲面上较“好”参数(不一定正交)的讨论,将在 §5 以及第四章和第六章中多处出现.例3对正则曲面S: r=r(u, v) ,求两族坐标曲线的二等分角轨线C的微分方程.解:对于两族坐标曲线的自然切向r u和r v,二等分角向量场为r u |r u|±r v|r v|=r uE±r vG.故轨线C的切向微元r u d u+r v d v处处与该向量场平行,即沿C有d u:d v=1E:±1G,从而所求微分方程为E d u±G d v= 0 .例4已知正则曲面S: r=r(u, v) 的第一基本形式确定为 (3.2) 式.设微分方程α(u, v) d u2+ 2β(u, v) d u d v+γ(u, v) d v2= 0 在定义区域内过点 (u0, v0)有且仅有不相切的正则解曲线Γi: {u=u i(t i)v=v i(t i),i= 1, 2 ;两条曲面S上的曲线C i: {u=u i(t i)v=v i(t i)相交于点P0: r(u0, v0) .试证:两条曲线C i正交于点P0的充要条件为(Eγ- 2Fβ+Gα)|(u, v) = (u0, v0)= 0 .证明:记α0=α(u0, v0) , β0=β(u0, v0) ,γ0=γ(u0, v0) .记两条曲线C i在点 (u0, v0) 处的两个切向微元分别为a i : b i,则由正则性可知a i2+b i2≠ 0 ;由微分方程可知α0 a i2+ 2β0a i b i+γ0b i2= 0 .而由 (3.12) 式,C i之间正交条件写为a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0= 0 .以下分两种情形讨论.情形①:α0=γ0= 0 ,则β0≠ 0 ;否则过点 (u0, v0) 的正则曲线都是解曲线,而与已知矛盾.此时,由微分方程知a i b i= 0 ,故只能有两组解{a1= 0, b1≠ 0 ,a2≠ 0 , b2= 0 ;或{b1= 0 , a1≠ 0 ,b2≠ 0 , a2= 0 ;对应正交条件等价化为F0= 0 ,即为所论条件.情形②:α0和γ0不同时为 0 ,不妨设α0≠ 0 ;则由微分方程可知,必有b i≠ 0 ;此时,不妨规范为b i= 1 ,则方程转化为α0 a i2+ 2β0a i+γ0= 0 .此时,由一元二次方程系数的性质,得知a1+a2=-2β0α0,a1a2=γ0α0,从而a1a2E0+ (a1b2+ b1a2)F0+ b1b2G0= a1a2E0+ (a1+ a2)F0+ G0=γ0α0E0+-2β0α0F0+ G0=1α0 (γ0E0-2β0F0+α0G0) .此式说明所论条件为充要条件.以上情形是完全分类,故结论得证.2.曲面的面积元素和区域面积现考虑曲面S的面积在已知第一基本形式之时的求解问题.在参数区域U内,任取矩形使其分别以点 (u, v), (u+d u, v),(u, v+d v), (u+d u, v+d v) 为顶点,则在曲面S上对应形成以点P1:(u, v), P2: (u+d u, v), P3: (u, v+d v),P4: (u+d u, v+d v) 为顶点的坐标曲线四边形.按照微积分理论,在略去更高阶无穷小量时,该曲边四边形的面积就等于直边三角形P1P2P3面积的二倍,从而就等于由向量P1P2和P1P3所张成的平行四边形的面积.而在略去更高阶无穷小量时,P1P2⨯P1P3= [r(u+d u, v) - r(u, v)]⨯[r(u, v+d v) -r(u, v)]≈ [r u(u, v)d u]⨯[r v(u, v)d v] =EG-F2 d u d v n(u, v) ,故曲面的面积元素可以表示为(3.13)dσ=|r u⨯r v| d u d v=EG-F2 d u d v,其中第二个等号是根据(3.7) 式.进而,曲面上任一有界区域r(U0) 的面积A(U0) 可以表示为(3.14) A(U0) =⎰⎰U0 dσ=⎰⎰U0|r u⨯r v| d u d v=⎰⎰U0EG-F2 d u d v.v)图3-14在参数变换下,根据 (3.8) 和 (3.10) 式以及二重积分的变量代换公式,易知面积元素对应相同,面积也对应相同;这与几何属性是相容的.以上结果的核心,列为如下定理.定理2 正则曲面的面积元素和区域面积由第一基本形式可完全确定.习 题⒈ 证明正则曲面的第一基本形式在容许参数变换下不变.⒉ 证明正则曲面的第一基本形式在 E 3 的正交标架变换下不变.⒊ 试求下列曲面的第一基本形式:① 单位球面 r (u , v ) = (2u u 2 + v 2 + 1 , 2v u 2 + v 2 + 1 , u 2 + v 2 - 1 u 2 + v 2 + 1) ; ② 悬链面 r (u , t ) = (t , cos u ch t , sin u ch t ) .⒋ 在螺面 r = (u cos v , u sin v , ln cos u + v ) 上,试证:每两条螺线(v 线)在任一 u 曲线上截取等长的曲线段.⒌ 球面上的斜驶线是指与经线交成定角的轨线,试在经纬参数化下确定其微分方程.⒍ 已知正则曲面 S : r (u , v ) 之上有两族正则曲线 ϕ( u , v ) = a 和 ψ( u , v ) = b ,其中a 和b与 (u , v ) 无关.试证:它们互相正交的充要条件为E ϕv ψv -F (ϕu ψv + ϕv ψu ) +G ϕu ψu = 0 .⒎ 已知曲面的第一基本形式为 d s 2 = d u 2 + (u 2 + 4) d v 2 .试求:① 其上两条曲线 C 1: u + v = 0 与 C 2: u - v = 0 的交角;② 其上三条曲线 C 1: u = v 2 , C 2: u = - v 2 与 C 3: v = 1 所围成的曲边三角形的边长和各个内角;③ 其上三条曲线 C 1: u = v , C 2: u = - v 与 C 3: v = 1 所围成的曲边三角形的面积.。
第一章 肥皂膜实验如果你把一根铜丝弯成一条封闭的空间曲线(留出一个把手),将这个框架浸入配制好的肥皂液,然后将它轻轻地提取出来,那么肥皂液就会在铜丝框架上张成一个处于平衡状态的绚丽多彩的薄膜,这个薄膜所成的曲面有哪些性质?它是什么样的曲面?这是一些令人神往的问题.我们知道,在数学发展史上有许多生动的例子说明,物理实验经常为数学模型的形成及数学理论的完善和发展提供极有价值的启示和刺激.前面所提到的实验由19世纪的比利时物理学家J.Plateau 作了仔细的观察和详细的描述.如果我们忽略不计肥皂膜液本身的重量,也不考虑除了肥皂膜表面张力以外的其它干扰因素(例如外界的风力等),则薄膜的势能在表面张力作用下便会达到最小值,从而必定使肥皂膜采取的曲面形状具有最小的面积.Plateau 通过肥皂膜的有趣实验,确定了肥皂膜曲面和肥皂泡曲面的许多几何性质.因此,Plateau 至少是用实验的手段产生了以非常一般的任意空间曲线为边界的面积最小的曲面.现在,通常把寻求一给定的空间曲线C 为边界的面积最小的问题称为Plateau 问题,当然,要在数学上把这个问题讲清楚绝非易事,以后我们会介绍Plateau 问题在数学上的正确提法.上面的问题命名为Plateau 问题,是因为Plateau 系统地对于这个问题作了实验研究和观察.但是早在18世纪,Euler 就提出过这类问题.Euler 在1744年发表的《寻求具有某种极大或极小性质的曲线的技巧》一书中举出了一个例子,要求决定出介于点(00,y x )和点(11,y x )之间的平面曲线)(x f y ,使得它在绕x 轴旋转时所产生的曲面的面积最小.Euler 证明了函数)(x f 必须是一段悬链线,生成的旋转面叫悬链面.Euler 所得到的实际上就是以位于两个平行的平面上,且连心线与平面垂直的两个圆周为边界的面积“最小”的曲面.尽管如此,一般都认为这类曲面的研究是grange 在1760年开始的,因为他第一次给出了这类曲面应该满足的偏微分方程.他所考虑的是三维欧式空间3R 中由函数),(y x f Z =给出的图像M ,其中点),(y x 的变化范围是xy 平面上的一个区域grange 利用他所创立的变分法原理证明了:如果在所有定义在区域D 上,并且在边界D ∂上取值相同的函数的图像中M 的面积最小,则函数),(y x f Z =必须满足偏微分方程0)1(2122=++-+yy y xy y x xx y f f f f f f f )( 这就是著名的所谓极小曲面的方程.在1776年,几何学家J.B.Meusnier 证明了函数),(y x f Z =的图像M 的平均曲率是}.)1(2)1{(121222322yy x xy y x xx y yx f f f f f f f f f H ++-+++=)(因此,Meusnier 给出了Lagrange 的方程的几何解释:满足偏微分方程的曲面就是其平均曲率为零的曲面.此外,他还指出悬链面和正螺旋面是满足极小曲面的两个非线性函数的图像.现在,把3R 中平均曲率为零的曲面称为极小曲面.第二章 极小曲面方程这一节,首先要把曲面在他它的邻近变形的概念正确地表达出来.然后据此导出lagrange 的极小曲面方程.假定我们所考虑的曲面M 是连续可微函数Z=f(x,y)的图象,其中点(x,y )的变动范围是xy 平面上的一个区域D.今后称M 为定义在区域D 上的一张图.若有连续可微函数Z=F (x,y,t ),…………(2.1)其中(x,y,t )∈D ⨯(-ε,ε),ε是任意一个正数,并且F (x,y,0)=f(x,y) …………(2.2)对于任意的(x,y )∈D 成立,则称函数Z=F (x,y,t )是Z=f(x,y)的一个变分. 每当t 取定一个属于(-ε,ε)的数值t 0,函数Z=F (x,y,t 0)就给出定义在区域D 上的一张图M 0t .条件(2.2)说明M 0=M.所以,给定函数Z=f(x,y)的一个变分,就是给出了图M 在它邻近的一个变形M t ,有时,我们也称M t 是M 的一个变分.如果变分(2.1)除了满足条件外,还满足 F (x,y,t )=f(x,y) …………(2.3)其中(x,y,t )是∂D ⨯(-εε,)中的任意点,则变形曲面M t 与图M 有共同的边界曲线.这时,我们称(2.1)是Z=f(x,y)的有相同的边界值的变分,或称M t 是图M 的有固定边界的变分.将函数线性化是研究函数的最简单的方法之一.对于变分(2.1)也可以作同样的考虑.令g(x,y)=0,,=∂∂t tt y x F )(,…………(2.4)则g(x,y)是定义在D 上的连续可微函数.它的几何意义是变分曲面M t 在点(x,y )处在t=0时刻变形的速率.令F 0(x,y,t)=f(x,y)+tg(x,y),…………(2.5)则Z=F 0(x,y,t)仍是Z=f(x,y)的一个变分.而且Z=F 0(x,y,t)是函数Z=F(x,y,t)关于变量t 的Taylor 展开式中略去t 的二次以上的项所得到得表达式.下面的计算会告诉我们,在变分计算中起本质作用的是变分Z=F(x,y,t)关于t 的一此近似值,也就是定义在区域D 上的函数g(x,y),为了把变形的速度形象地表示出来,我们引进向量场V=(x,y,g(x,y)) …………(2.6)它定义在D 上,也可以认为定义在图形M 上,我们称V 为图M 的变分向量场.如果图M 的变分M t 有固定的边界,则从(2.3)式得g(x,y)=0, ∀(x,y)∈∂D曲面面积的定义对于极小曲面理论而言自然是十分重要的基本问题.事实上,在极小曲面理论的发展过程中,关于曲面面积定义的讨论占据重要的位置,几何测度论就是这个过程中十分重要的产物.在这里我们先承认函数Z=f(x,y)的图M 的面积为A(M)=…………(2.7)此式的几何意义将在第三节介绍,同时在那里还要对曲面面积的定义作一些讨论.对于M 的一个变分M t .命A(M t)=, 它是一个以t 为自变量的函数.我们知道,如果把M 看成张在边界曲线∂M 上的肥皂膜.那么当M 在它邻近作保持边界曲线不动的变形时,即当M 作固定边界的变分M t 时,M 的面积取最小值,也就是对任意的t ∈(-,εε)有A(M)≤A(M t ) …………(2..8)我们已经假定F(x,y,t)是连续可微函数,所以A(M t )是t 的连续可微函数.(2.8)式意味着函数A(M t )在t=0时达到最小值.故有t ddt=A(M t )=0 …………(2.9)我们的任务是把上式的左端计算出来,由(2.5)式知 F(x,y,t)=f(x,y)+tg(x,y)+t 2h(x,y,t), 因此 F x ∂∂=f x ∂∂+t g x ∂∂+t 2h x∂∂F y ∂∂=f y ∂∂+t g y ∂∂+t 2h y∂∂ 1+2F x ∂⎛⎫ ⎪∂⎝⎭+2F y ⎛⎫∂ ⎪∂⎝⎭=(1+f 2x +f 2y )+2t(f x g x +f y g y )+t 2h (x,y,t)⋅ 其中Q(x,y,t)是有界函数,且 P(x,y)=222()1x x y y x y f g f g f f +++t=0附近的Taylor 展式,我们得到~2(1(,)(,,))2t P x y t Q x y t ++, 其中~Q (x,y,t )是有界函数.由此可得0t d dt=A(M t)=0t Dt =∂∂⎰dxdy=f g f g +dxdy条件(2.9)成为:对D 上任意的连续可微函数g(x,y),都应该有f g f g +dxdy=0 …………(2.10)为了用分部积分法从(2.10)导出f 应满足的偏微分方程, 命 p=f x ∂∂, q=f y∂∂ 并且把(2.10)被积表达式写成g gp q ∂∂⋅+⋅=x y ⎛⎫⎛⎫∂∂+∂∂()qg x y x ⎡⎤⎛⎫⎢⎥ ⎪∂∂⎢⎥⎪-+⋅∂∂∂⎡⎤⎢⎥ ⎪- ⎪⎢⎥⎢⎥∂⎣⎦⎝⎭⎣⎦ 对于右端前两项在D 上的积分可以用Green 公式:(,)(,)D D B A A x y dx B x y dy dxdy x y ∂⎛⎫∂∂+=- ⎪∂∂⎝⎭⎰⎰,…………(2.11) 其中A(x,y),B(x,y)是定义在D 上的连续可微函数,边界∂D 的正定向要求沿曲线∂D 正向行进时区域D 落在它的左边,所以我们有0()t t d A M dt=∂=⎰-D gdxdy x y ⎡⎤⎛⎫⎛⎫∂∂⎢⎥+∂∂⎢⎥⎣⎦⎰ 前面已假定M t 是M 的固定边界的变分,故 g0D∂≡,于是(2.10)式成为0()t t d A M dt==-0D gdxdy x y ⎡⎤⎛⎫⎛⎫∂∂⎢⎥+=∂∂⎢⎥⎣⎦⎰………(2.12)如果上面的条件对任意的在边界D ∂上的值为零的连续可微函数g(x,y)恒成立,则容易导出函数Z=f(x,y)在区域D 上满足微分方程2x y ⎡⎤⎛⎫⎛⎫∂∂⎢⎥+∂∂⎢⎥⎣⎦=0 …………(2.13) 为此只要证明(2.13)式在任意一点(0,0x y )∈D 成立.在这里关键是要找出一个非负连续可微函数,使得它在一个固定点的某领域内恒等于1.而支集包含在区域D 内,这样的函数是存在的,我们可以具体地构造出来.例如:设0,εδ<<命1e x p ,()()0,()x x x x x εδεδεδα⎧<<⎨--⎩≤≥⎧⎪=⎨⎪⎩或x()x β=()()xx dxx dxdx αα+∞+∞-∞⎰⎰显然,函数(),()x x αβ都是实轴R 上的光滑函数,满足0()1x β≤≤,且{1,0,()x x x εδβ≤≥=这些性质 不难从下图看出来,不需另行验证函数()x β通常称为截断函数,其功能是把函数在某一点的邻域上的部分分离出来,而保持函数在整体上的可微性不变.比如,对于(0,0x y )∈D ,可以取0εδ<<,使得已(0,0x y )为中心,以为边长的正方形0000x x y y ⎡⎡⨯⎣⎣整个落在区域D 内,命g(x,y)=x y ⎡⎤⎛⎫⎛⎫∂∂⎢⎥+∂∂⎢⎥⎣⎦2200()()x x y y ββ--则g 是整个D 上的连续可微函数.并且 g0D∂≡.此外,g在0000x x y y ⎡⎡+⨯-+⎣⎣内恒等于方括号内的表达式. 将上面构造的g(x,y) 代入(2.12)式边得到00x x x y y y -≤-≤⎡⎤⎛⎫⎛⎫∂∂⎢⎥+∂∂⎥⎦⎰2⋅2200()()0x x y y dxdy ββ--=由于被积表达式为非负函数,其积分为零,蕴含着被积表达式必定恒等于零.于是在点(x 0,y 0)有0,0()0x y x y =⎛⎫⎛⎫∂∂+∂∂由(x 0,y 0)在D 内的任意性得(2..13)式在D 内成立. 将(2.13)式展开可得x y ⎛⎫⎛⎫∂∂+∂∂=32221(1)x y f f ++22(1)2(1)0y xx x y xy x yy f f f f f f f ⎡⎤+-+++=⎣⎦此即极小曲面方程.上面得讨论可以归纳如下得结论:设M 是定义在区域D ⊂R 2上得连续可微函数Z=f(x,y)的图.如果对于M 的任意一个保持边界不动的变分M t ,都有A(M)≤A(M t ).则函数Z=f(x,y)必须满足方程22(1)2(1)0y xx x y xy x yy f f f f f f f +-++= …………(2.14)第三章 曲面的面积前面所讨论的曲面都表示为函数Z=f(x,y)的图象.这种表示是有局限性的,它要求曲面与平行于Z 轴的直线只能有一个交点.更常用的表示曲面的方法是用参数方程.假定在3微欧氏空间R 3中取定一个笛卡儿直角坐标系[0,i,j,k],那么曲面M 上的点P (x,y,z )可以用三个函数(,)(,)(,)x xu v y y u v z z u v =⎧⎪=⎨⎪=⎩…………(3.1) 表示,其中(u,v )称为曲面的参数,它的变化范围是平面R 2的一个区域D ,通常,我们用r 表示向径op →,于是曲面(3.1)可以记成r=r(x(u,v), y(u,v),z(u,v)) …………(3.2)参数(u,v )是区域D 上的点的坐标,同时也是曲面M 上的点的坐标.这是因为把参数u,v 的值代入方程(3.1),便得到曲面上的对应点的笛卡儿坐标(x,y,z ),所以曲面上的点是由u,v 的值通过方程(3.1)而确定的.我们把(u,v )称为曲面M 上的点的曲纹坐标.对于能用微积分进行研究的曲面,一般要求(3.1)式中的函数x(u,v),y(u,v),z(u,v)有连续的三阶以上的偏导数.另外,为了使方程(3.1)确定给出一张曲面,通常还要求在曲面上每一点处u-曲线合v-曲线的切向量r u =(,,u u u x y z )和r v =(,,)v v v x y z 不共线,即u v r r ⨯=,,0uu uu uu vv vv vvy z z x x y y z z x x y ⎡⎤≠⎢⎥⎣⎦…………(3.3) 满足以上条件的曲面称为正则曲面.函数Z=f(x,y)的图象可以看作(x,y )为参数的正则曲面: r=(x,y,f(x,y)) …………(3.4) 这时 r x =(1,0,f x ), r y =(0,1,f y ),所以 x y r r ⨯=(,,1)0x y f f --≠. 由向量的定义可知()0,()u u v v u v r r r r r r ⋅⨯=⋅⨯=0 然而,切向量u r 和v r 在曲面上张成在该点的切平面,所以上式表明u v r r ⨯与曲面的切平面垂直;利用正则曲面M 上就有一个完全确定的单位法向量场 n=u vu vr r r r ⨯⨯ …………(3.5) 这样,在正则曲面M 上的每一点r(u,v)附加了一个标架{,,,}u v r r r n .它的原点就是曲面M 上的点r ,标架的前两个向量,u v r r 是曲面在该点的两个切向量,它们分别是参数曲线的切向量,n 是曲面在该点的单位法向量.我们称{},,,u v r r r n 为曲面在该点的自然标架.为了利用自然标架场来研究曲面,知道该标架场的度量系数是十分重要的,所谓一个标架的度量系数是指标架向量之间的内积的值.我们记:222222u u u u u u v v u u v u v u v u v v v v E r r x y z F r r r r x x y y z z G r r x y z ⎧=⋅=++⎪=⋅=⋅=++⎨⎪==++⎩…………(3.7) 其余的系数量0u v r n r n ⋅=⋅=, 1n n ⋅=.如果我们用dr 表示曲面M 在点r(u,v)的切向量,它可以表示为 u v dr r du r dv =+ …………(3.7)因此,,u v d d 恰好是切向量r d 关于自然标架的分量,向量r d 的长度平方为2dr =222dr dr Edu Fdudv Gdv ⋅=++…………(3.8)右端即为曲面的第一基本形式,通常用I 表示.下面我们要讨论曲面面积的概念,并且把它用第一基本形式的系数表示出来.关于连续曲面面积的定义,Lebesque 给出的定义如下:对每一个连续曲面S 都指定了一个数A(S),称为S 的面积,要求满足以下条件:(1)如果S 是多面体的表面,则A (S )是S 的通常意义下的面积,即它等于组成S 的多个多边形面积之和;(2)若有一系列曲面S n →S ,则l i m n →∞A(S n )≥A(S);(3)对于每一个连续曲面S ,必能找到一串多面体的表面P n 使P n →S 且l i m ()()n n A P A S →∞=定义中涉及到曲面序列S n 趋于曲面S 的概念,后来由Frechet 所澄清.在Frechet 意义下,两块连续曲面之间的距离是这样定义的:假定两块曲面S 1,S 2是从单位圆盘D 到R 3的两个连续映射的象即: 311:f D S R →⊂ 322:f D S R →⊂命 1212(,)((),())x Df f Sup d f x f x δ∈= 其中),(∙∙d 是R 3中距离函数.显然,如果12(,)0f f δ=.则12f f =.但我们要考虑的是两个曲面的接近程度,而不是它们参数表示的接近程度,所以需要在它们所有可能的参数表示中取12(,)f f δ的下确界.于是命1212(,)inf (,)Td S S f f T δ= ,其中T 遍历了所有的从D 到自身的同胚.12(,)d S S 称为曲面S 1和S 2之间的距离.应该指出的是,在Frechet 意义下考虑两个曲面之间的距离时,这两个曲面必须有相同的拓补类型.在前面的叙述中12,S S 都是与圆同胚的曲面.现在,Lebesque 的定义中的A(S)可以这样取:设{}n P 是任意的在Frechet 意义下收敛于S 的多面体表面的序列,命{}()i n f l i m ()n n P n A S AP →∞=, 其中()n n A P P 是在通常意义下的面积,那么A(S)适合Lebesque 定义的要求,可以证明,当曲面M 是连续可微的时候,上面定义的()A M 可以表示成二重积分:()A M =⎰,…………(3.10)由于证明过程相当复杂,这里不予以证明.但是我们要指出两点.一是表达式(3.10)与曲面参数表示的选择无关,在就是表达式有明显的直观意义.假定曲面M 有参数变换(,)(,)u uu v v v u v =⎧⎨=⎩(,)u v D∈ …………(3.11) 在新参数,uv 下.曲面M 的参数方程(3.1)成为 ((,),(,)((,),(,)),((,),(,)),x x u u v v u v y y u u v v u v z z u u v vu v === 直接计算得到 22()2(),u u v v EE F G u u u u∂∂∂∂=+⋅+∂∂∂∂22(),()2().u v u v u v v v FE F G u v u v v u uv u u v u G E F G v v v v∂∂∂∂∂∂∂∂=⋅+⋅+⋅+⋅∂∂∂∂∂∂∂∂∂∂∂∂=+⋅+∂∂∂∂(,),(,)u v uv ∂=∂ …………(3.12) 其中(,)(,)u v uv ∂∂ =,uuu v v v uv∂∂∂∂∂∂∂∂ 是参数变换(3.11)的Jacobi 行列式.根据二重积分的变量替换公式,我们有(,)(,)u v dudvu v ∂==∂⎰⎰⎰ . 由此可见,(3.10)式尽管是用曲面的参数方程给出的,但是它与参数的选择是无关的.设所考虑的小曲面片是σ适当地选取R 3中的笛卡儿直角坐标系使得σ 在指定点P 的切平面恰好是xy-平面.设σ的参数方程是: x=x(u,v), y=y(u,v), z=z(u,v),其中(u,v )σ∈D ⊂,则σ在点P 的切平面上的正交投影σ的方程是: x=x(u,v), y=y(u,v), z=0.其中(u,v )σ∈.当σ的直径充分小时,上面的方程建立了σ与σ之间的一一对应.即(u,v )可以看作投影区域σ上的曲纹坐标;所以根据二重积分的变量替换公式.σ的面积可表示为:(,)().(,)x y A dxdy dudv u v σσσ∂==∂⎰⎰注意到曲面σ在点P 的法线与Z 轴重合,即 ,(,)()(,0,0)(,)u v P Px y r r u v ∂⨯=∂ 故(,).(,)u v P Px y r r u v ∂⨯=∂于是根据曲面的法向量u v r r ⨯的连续性,在σ上任意一点有(,)(,),(,)u v x y r r u v u v σε∂=⨯+∂ 其中(,)u v σε在σ的直径很小时可以任意地小,特别是,对于任意给定的ε>0,只要分割得相当细,从而σ得直径充分地小,总可以使对于任意得(u,v )σ∈有(,)u v σε<ε因而A(σ)=(,)u v r r dudv u v dudv σσσε⨯+⎰⎰()()u v A r r dudv A σσεσ-⨯≤⋅⎰ …………(3.13)要指出的是表达式u v r r dudv σ⨯⎰不再与R 3中笛卡儿直角坐标系的特殊取法有关系,因此从(3.13)式得到()u vDA r r dudv σσ-⨯≤∑⎰(,)()u v dudv A D σσσεε≤⋅∑⎰ 由此可见,若用()d σ表示σ的直径,则有m a x ()l i m().uvd A r r dudv σσσσ→=⨯∑⎰…………(3.14) 但是,由向量积的定义,我们知道sin (,)u v u v u v r r r r r r ⨯=<=所以(3.14)式的右端就是(3.10)式右端的二重积分. 函数Z=f(x,y)的图象可以看作方程(3.4)给出的参数曲面, 所以(,,1),x y x y r r f f ⨯=--x y r r ⨯=故函数Z=f(x,y), (x,y)D ∈的图象的面积是A(M)=.⎰这就是前面的(2.7)式.第四章 曲面的曲率再上一节我们已经讨论了参数曲面上的度量,也就是曲面的第一基本形式,可以计算曲面上曲线的长度,以及计算曲面的面积,现在,简要叙述以下曲面曲率的概念.先给出曲面的第二基本形式:Ⅱ2222r u v n d Ld Mdudv Nd =⋅=++…………(4.1)它的系数L ,M ,N 称为曲面的第二类基本量. 现在把曲面的单位法向量u v u v r r n r r ⨯==⨯代入(4.1) 式中,就有u u u v vv L r n M r n N r n =⋅==⋅==⋅=设正则曲面S 的参数方程是(,)r r u v =,I 和Ⅱ分别是它的第一基本形式和第二基本形式,则n k II =I =2222()2()()2()L du Mdudv N dv E du Fdudv G dv ++++ …………(4.2)称为曲面S 在点(u,v )处沿切线方向(du,dv )的法曲率.于是,曲面S 在点(u,v )处沿切线方向(du,dv )的法曲率恰好等于曲面S 上经过点(u,v )以(du,dv )为切方向的曲线在该点的法曲率.曲面S 在点(u,v )处由切方向(du,dv )和法向量n(u,v)决定了一个平面.称为曲面S 在该点处由切方向(du,dv )确定的法截面,法截面与曲面S 本身相交成一条平面曲线,称为曲面在该点的一条法截线.在直观上,可以把法截面想象为与曲面在一点处垂直的“刀”,法截线就是用这把刀在曲面上切割出来的剖面线.法曲率恰好是曲面在该点沿相应的切方向的剖面线的相对曲率,这正是Euler 研究形状的基本出发点,下面我们要导处Euler 公式.不妨假定在给定点P 的附近取参数系(u,v ),使得参数曲线网在点P 使彼此正交的(显然,这总是能做到的).即在P 点有0u v r r ⨯=或F=0,假设切向量(du,dv ),u v r du r dv +与u-曲线切向量u r 的夹角是θ.则有c o s u v u u v u rd u r d vr d u r d v θ+=⋅+因而sin θ=于是曲面在P 点沿切方向(du,dv )的法曲率是22222n Ldu Mdudv Ndv k Edu Gdv ++=+=22cos sin sin L N E G θθθθ++在P 点,E ,G ,L ,M ,N 都是确定的数值,所以上式明确地把法曲率n k 表示为方向角θ的函数,它还可以改写为11cos2222n L N L N k E G E G θθ⎛⎫⎛⎫=-++ ⎪ ⎪⎝⎭⎝⎭.如果10,2L N E G ⎛⎛⎫-≠ ⎪ ⎝⎭⎝则有20θ使得01c o s 2L N θ⎛⎫- ⎪=0s i n 2θ=于是012().2n L N k E G θθ⎛⎫=-++ ⎪⎝⎭…………(4.3) 由此可见,当0θθ=或0θπ+时,n k 取最大值112L N k E G ⎛⎫=++⎪⎝⎭ 4.4) 当00322πθθθπ=++或时,n k 取最小值212L N k E G ⎛⎫=+ ⎪⎝⎭…………(4.5) 我们把曲面在P 点得最大法曲率1k 和最小法曲率2k 称为曲面在P 点得主曲率.用21,k k 代入(4.3)式得)(s i n )(c o s 022021θθθθ-+-=k k k n .…………(4.6)此即Euler 公式.如果0,21=⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛-EG M G N E L ,则得⎪⎭⎫ ⎝⎛+=G N E L k n 21. 它与切方向θ无关,这时,曲面的主方向不确定,这样的点称为曲面的脐点. 命 2121),(21k k K k k H =+=…………(4.7) 分别称为曲面在P 点的平均曲率和Gauss 曲率.根据21,k k 的表达式(4.4),(4.5),在F=0时我们有H 和K 的表达式:⎪⎭⎫⎝⎛+=G N E L H 21 EG M LN K 2-=要强调指出的是,我们在上面计算曲面在点P 的主曲率21,k k .平均曲率H 和Gauss 曲率K 时.预先假定参数曲线网在P 点正交.即在P 点有F=0.如果去掉这个假定,则不难导出 )(222F EG NGMF LG H -+-=…………(4.8)22FEG M LN K --= …………(4.9) 下面,我们来看一下函数Z=f(x,y)的图像的平均曲率,Gauss 曲率的表达式,在第三节中已经指出Z=f(x,y)的图像可以看作一下的参数曲面 )),(,,(y x f y x r = …………(4.10) 直接微分得到),0,1(x x f r =, ),1,0(y y f r =, ).1,,(y x y x f f r r --=⨯ 因此曲面的单位法向量是,11,1,1222222⎪⎪⎪⎭⎫ ⎝⎛++++-++-=y x y x y y x x f f f f f f f f n 第一基本形式和第二基本形式的系数分别是221,,1y y x x f G f f F f E +==+=.1,1,1222222yxyy yxxy yxxx ff f N ff f M ff f L ++=++=++=所以平面的平均曲率是])1(2)1[()1(21)(222223222yy x xy y x xx y yxf f f f f f f f f F EG NEMF LG H ++-+++=-+-=…………(4.11) Gauss 曲率是)1(22222y x xy yy xx f f f f f F EG M LN K ++-=--= …………(4.12) 比较H 的表达式(4.11)和Lagrang 的极小曲面方程(2.14)可知,方程(2.14)等价于:H=0 …………(4.13)这是完全几何化的条件,与表示曲面的方式是无关的,因此我们给极小曲面下一个正式的定义:3R 中平均曲率恒等于零的曲面称为极小曲面.第五章 极小曲面的Weierstrass 公式本节我们要指出极小曲面与复变函数论有密切的联系,从极小曲面理论的发展和现状来看,复变函数论在其中起着不可替代的作用,原因是Weierstrass 发现了极小曲面方程的用复变函数给出的通解,即所谓的Weierstrass 公式,从而揭示了极小曲面与全纯函数,亚全纯函数之间的本质联系.关于曲面论的一个特别重要的事实是,在有向的正则曲面上可以引进复坐标,而且当两个复坐标域有彼此重叠的部分时,这两种复坐标之间有互为全纯函数(或称复解析函数)的关系.用现代的语言说,有向的正则曲面是一个一维复流行,至于在有向正则曲面上可以引进复坐标的根据在于曲面上存在局部的等温参数系.在第三节,我们对于正则参数曲面 2),(),,(R D v u v u r r ⊂∈=定义了第一基本形式: 222Gdv Fdudv Edu I ++=.其中G F E ,,恰好是自然标架的切向量v u r r ,的度量系数,即 .,,v v v u u u r r G r r F r r E ⋅=⋅=⋅=如果,0≡F 并且G E ≡则我们称(u,v)为曲面的等温参数系.在等温参数系(u,v)下,自然标架的切向量v u r r ,是彼此正交的,并且它们的长度相等.此时,曲面的第一基本形式成为)(22dv du I +=λ 其中 0),(),(>==v u G v u E λ.我们知道( u,v)本来是区域2R D ⊂ 内的笛卡儿直角坐标系,平面区域D 本身的第一基本形式是 22dv du +.我们所考虑的曲面实际上是从3R D 到内的一个映射,所以(u,v)是曲面上的等温参数系的意思是上面的映射是保角的,即在每一点(u,v)的两个切向量的夹角在映射下保持不变, 并且在该点的各个方向的切向量的长度在映射下按照同一个比例系数),(v u λ伸缩,既然每一个有向正则曲面在局部上总是存在等温系数的.因此任意两个正则曲面在局部上都是彼此成保角对应的,这是二维曲面特有的性质.对于曲面上的等温参数系(u,v),引进复变量v u 1-+=ω,则ω是极小曲面上的局部复坐标系.重要的是,如果M 在有重叠部分的两个区域上分别有等温参数系(u,v)和)~,~(v u,命ω~=v u ~1~-+,则在这个区域的重叠部分,复坐标ω~是ω的全纯函数,反过来ω也是ω~的全纯函数.实际上,由于)~,~(),,(v u v u 都是等温参数系,故在公共区域上有)~~(~)(2222vd u d dv du I +=+=λλ, 其中0~,>λλ.所以2222222222~~~~~~~~~~)(dv v v v u dudv u v v v v u u u du u v u u v d u d dv du ⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂∂∂+∂∂∂∂+⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=+=+ρ故有ρ=⎪⎭⎫⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂2222~~~~v v v u u v u u ,0~~~~=∂∂∂∂+∂∂∂∂uv v v v u u u, 其中0~>=λλρ.由此可见,Jacobi 矩阵是T v v uv v u u u ⋅=⎪⎪⎪⎪⎭⎫ ⎝⎛∂∂∂∂∂∂∂∂ρ~~~~, 其中T 是一个2阶正交矩阵.由于M 的有向性,从)~,~(),(v uv u →的参数变换是保持定向的,所以⎪⎪⎭⎫⎝⎛-=θθθθc o s s i n s i n c o s T , 这意味着 uv v u v v u u ∂∂-=∂∂∂∂=∂∂~~,~~. 上面的方程正好是函数),(~~),,(~~v u v v v u u u== 的Cauchy-Riemann 方程,故复坐标ω~写成ω的函数时是复解析函数,或全纯函数.同时这也说明参数变换)~,~(),(v uv u 必定是实解析的. 一般地,如果M 是一个Hausdorff 拓补空间,并且M 上的每一个点都有一个领域能够与复平面上的一个开区域建立同胚关系,那么通过上述同胚关系在这个邻域内建立了复坐标系.再进一步,如果M 上有非空交集的两个复坐标域上的复坐标都是全纯的.则我们称M 是一维复流行.或称M 为一个黎曼曲面.依照这个说法,空间3R 中任意一个有向的正则曲面都是一个黎曼曲面.在研究黎曼曲面的时候,引进复坐标系常常可以使问题边的简单.现在假定M 是用等温参数u,v 表示的一块曲面),(v u r r =.其中),(v u 的定义域D 是2R 内的一个区域,其第一基本形式为)(22dv du I +=λ.设复坐标为v u 1-+=ω,…………(5.1) 并且引进复化的偏微分算子,121121⎪⎭⎫ ⎝⎛∂∂-+∂∂=∂∂⎪⎭⎫ ⎝⎛∂∂--∂∂=∂∂v u v u ωω…………(5.2) 若f 是定义在D 上的可微函数,则ωωωωωωωωd fd f d d v f d d u f dv v f du u f df ∂∂+∂∂=--⋅∂∂++⋅∂∂=∂∂+∂∂=)(121)(21.…………(5.3)这个公式表明,可微函数),(v u f 可以看成变量ωω,的函数,而微分df 可以展开成ωωd d ,的一次形式,其系数是形式偏导数ω∂∂f 和ω∂∂f,函数f 是全纯函数的条件是f 的实部和虚部满足Cauchy-Riemann 方程.,)(I m )(R e ,)(I m )(R e uf v f v f u f ∂∂-=∂∂∂∂=∂∂ 这等价于.0Im 1Re 1Im 1Re 21=⎥⎦⎤⎢⎣⎡∂∂-+⎪⎭⎫⎝⎛∂∂-+⎪⎭⎫ ⎝⎛∂∂-+∂∂=∂∂v f v f u f u f f ω 由此可见,全纯函数f 有关于ω的导数,并且ωω∂∂=fd df …………(5.4) 利用上面的记号,把),(v u r 看成向量函数,命 v u r r r12--=∂∂=ωφ,…………(5.5) 它是曲面M 的切向量v u r r ,的复线性组合,即φ是一个复化的切向量.将φ对ω求偏导数,并且利用vu uv r r =,我们有)(21)1(121vv uu v u r r r r v u +=--⎪⎭⎫ ⎝⎛∂∂-+∂∂=∂∂ωφ.…………(5.6)容易看出ωφ∂∂是曲面的法向量.实际上0)(21)()(2121)(21=⎥⎦⎤⎢⎣⎡⋅∂∂-⋅∂∂+⋅∂∂=⋅+⋅=⋅∂∂v v v u u u u vv u uu u r r u r r v r r u r r r r r ωφ, 这里用到了),(v u 是等温参数的假定.同理有 0=⋅∂∂v r ωφ. 于是ωφ∂∂必定是曲面的单位法向量n 的倍数,该倍数是 ,)(21)(21H N L n r n r n vv uu λωφ=+=⋅+⋅=⋅∂∂ 因此 .Hn λωφ=∂∂…………(5.7) 如果M 是一块极小曲面,则上式成为,0242=+=∂∂=∂∂∂vv uu r r r ωφωω…………(5.8) 因此,曲面M 是极小曲面的充分必要条件是它的参数方程),(v u r 是等温参数v u ,的调和函数.这是Weierstrass 给出的定理.(5.8)式还说明,复化切向量φ作为向量函数是复变量ω的全纯函数.我们的目的是通过φ这样的全纯函数重建极小曲面的参数方程.我们先给出函数φ的几个性质.将φ与它自身作内积得到,12)1()1(22v u vuv u v u r r r r r r r r ---=--⋅--=⋅φφ所以),(v u 是曲面M 的等温参数的条件化为φ满足方程0=⋅φφ …………(5.9) 另外,,02)1()1(22>=+=-+⋅--=⋅λφφvu v u v u r r r r r r …………(5.10)这意味着函数φ不能有零点.现在记φ的分量分别为,,,321ϕϕϕ即,1,1,1321v u v u v u z z y y x x --=--=--=ϕϕϕ则方程(5.9)成为.0232221=++ϕϕϕ…………(5.11)条件(5.10)成为,0232221≠++ϕϕϕ即321,,ϕϕϕ没有公共零点. 将(5.11)改写成232121)1)(1(ϕϕϕϕϕ-=---+,命 211ϕϕ--=f …………(5.12) 如果f 恒等于零,则03≡ϕ,故 ,0≡=v u z z这说明M 是平行于xy-坐标面的一块平面.下面假定f 不恒等于零,因为f 是全纯函数,故它的零点都是孤立的,这样2131ϕϕϕ--=g …………(5.13)是ω的亚纯函数,g 的极点是f 的零点.此时,从(5.11)式得到 221232111g f ⋅-=---=-+ϕϕϕϕϕ …………(5.14)从(5.12),(5.13),(5.14)可以解出 ⎪⎪⎪⎩⎪⎪⎪⎨⎧=+-=-=fg g f g f 32221),1(21),1(21ϕϕϕ …………(5.15) 现在,这个过程可以倒过来,设f 是定义在D 上的全纯函数,g 是定义在D 上的亚纯函数.如果g 的极点集包含在f 的零点集内,并且g 的极点阶数的两倍不大于该点作为f 的零点的阶数,则由(5.15)式给出的321,,ϕϕϕ都是ω的全纯函数,并且它们自动地适合方程(5.11).另外,从(5.15)式得到,)1(21222232221g f +=++ϕϕϕ…………(5.16) 所以要321,,ϕϕϕ没有公共零点,必须使f 没有除g 的极点以外的零点,并且f 的零点的阶数不能大于该点作为g 的极点的阶数的两倍.把这两个方面结合起来,g 的极点集和f 的零点集恰好是一致的,并且g 的极点阶数的两倍等于该点作为f 的零点的阶数.最后,从ωφ∂∂=r2得到⎪⎭⎫ ⎝⎛∂∂+∂∂=-+⎪⎭⎫⎝⎛∂∂--∂∂=dv v r du u r dv du v r u r d )1(1ωφ+.1⎪⎭⎫ ⎝⎛∂∂+∂∂--dv u r du v r如果已经给出了参数方程),(v u r ,则 ⎰⎰∂∂+∂∂==),(),(),(),(0000),(v u v u v u v u dv vrdu u r dr v u r与积分路径无关,所以积分⎰ωφd 没有实周期,即对于区域D 内的任意一条闭路径C ,,0Re =⎰Cd ωφ并且⎰=ωωωφ0Re ),(d v u r .把上面的讨论总括起来得到下面的结果:设M :D v u v u r r ∈=),(),,(是以),(v u 为等温参数系的极小曲面,并且M 不是平行于xy-坐标面的一块平面,则有定义在D 上的全纯函数f 和亚纯函数g ,f 的零点集与g 的极点集是重合的,并且f 的零点阶数等于该点作为g 的极点的阶数的两倍,使得曲面M 的参数方程),(v u r 可以表示为⎪⎪⎪⎩⎪⎪⎪⎨⎧=+-=-=⎰⎰⎰ωωωωωωωωω00.Re ,)1(21Re ,)1(21Re 22fgd z d g f y d g f x …………(5.17)反过来,任意给定满足上述条件的全纯函数f 和亚纯函数g ,只要(5.17)式右边的积分没有实周期,则(5.17)式便给出了以(v u ,)为等温参数的极小曲面.由此可见,(5.17)给出了3R 中极小曲面的通解,称为极小曲面的Weierstrass 公式,通常把(5.17)中的函数g f ,称为W -因子.参考文献[1] 梅向明,黄敬之. 微分几何.第三版. 北京:高等教育出版社, 2003.[2] 陈维桓. 极小曲面. 湖南:湖南教育出版社,1993.[3] 陈维桓. 微分几何初步. 北京:北京大学出版社,1990.[4] L. V. 阿尔福斯, 复分析, 上海:上海科学技术出版社, 1984.[5] 陈维桓. 夏仁龙. 赵国松. 关于3R中极小曲面的一个注记. 北京大学学报, 1987, 第一期:12~15.[6] L.Xiao. Some results on pseudo-embedded minimal surfaces in3R.Acta Math. Sinica,1984. 3:116~120[7] M. Struwe. Plateau’s Problem and the Calculus of Varia-tions. PrincetonUniv. Press,1998.[8] 华东师范大学数学系. 数学分析. 第三版. 北京:高等教育出版社,2003.[9] J. L. M. Barbosa, M. Do Carmo ,On the size of a stable minimal surfacesin 3R.Amer. J. Math. ,1976, 98:515~528[10] J. L. M. Barbosa, A. G. Colares, Minimal surfaces in 3R.Lecture Notesin Math,1195.[11] 熊金城. 点集拓补讲义. 第三版. 北京:高等教育出版社. 2003.[12] M. do Carmo, C.K. Peng. Stable complete minimal surfaces in3R areplane, Bull. AMS,1979, 1:903~906[13] R. Courant. Dirichlet’s Principle,Conformal Mapping, and MinimalSurfaces. Interscience, New York, 1950.[14] R. Courant. Soap film experiments with minimal surfaces. Amer. Math.Monthly ,1940.[15] H. B. Lawson, Jr. ,Lectures on Minimal Surfaces. Publish or Perish,Berkeley,1980.谢辞本研究及学位论文是在我的导师郑老师的亲切关怀和悉心指导下完成的。

曲面的第一基本形式在曲面论中的作用微分几何学主要是运用数学分析的理论研究空间曲线或曲面在它一点领域的性质,是研究一般的曲线在小范围上的性质的数学分类学科.1827年高斯发表的《关于曲面的一般研究》著作,这在微分几何的历史上有重大的意义,它的理论奠定了现代形式曲面论的基础.高斯抓住了微分几何中最重要的概念和根本性的内容,建立了曲面的内在几何学.主要思想是强调了曲面上只依赖于第一基本形式的性质,例如曲面上曲面的长度、两条曲线的夹角、曲面上区域的面积、测地线、测地线曲率和总曲率等等.他的理论奠定了近代形式曲面论的基础. 1 曲面的第一基本形式的定义及计算公式给出曲面S :),(v u r r =上的曲线(C );)(),(t v v t u u ==或)](),([t v t u r = .对于曲线(C )有dtdv r dt du r dt dr v u +=,或者dv r du r dr u u +=.若以s 表示曲面上曲线的弧长,则=+==222)(dv r du r dr ds v v 22222dv r dudv r r du r v v u u ++.令v u v v u u r r F r r G r r E ===,,,则有2222Gdv Fdudv Edu ds ++=.这是关于v d u d,的一个二次形式,称为曲面S 的第一基本形式.表示为 222Gdv Fdudv Edu I ++=它的系数v v v u u u r r G r r F r r E ===,, 称为曲面S 的第一基本量[1](P67-68).例 求球面}sin ,sin cos ,cos cos {θψθψθR R R r = 的第一基本形式.解 }sin ,sin cos ,cos cos {θψθψθR R R r =. 可得出}0,cos cos ,sin cos {ψθψθψR R r -=}cos ,.sin sin ,cos sin {θψθψθθR R R r --=由此得到曲面的第一基本量为222,0,cos R r r G r r F R r r E ======θθθψψψθ .因而22222cos θψθd R d R I +=.曲面的第一基本形式在曲面论中占有非常重要的地位.而对于曲面的特殊参数表示),,(y x z z =有yz q q r x z p p r y x z y x r y x ∂∂==∂∂===},,1,0{,}.,0,1{)},,(,,{ . 由定义得221,,1q r r G pq r r F p r r E y y y x x x +====+==.曲面的第一基本形式为 2222)1(2)1(dy q pqdxdy dx p I ++++=.由上式知0,022>=>=v u r G r E ,又根据拉格朗日恒等式可知第一基本形式的判别式0)()(22222>⨯=-=-v u v u u r r r r r r F EG v .因此第一基本量G F E ,,满足不等式0,0,02>->>F EG G E .这表明第一基本形式是正定的,这个结论也可由2ds I =直接得出. 2 第一基本形式在求曲线弧长的作用由曲面的第一基本形式的定义知以s 表示曲面上曲线的弧长,则有2222Gdv Fdudv Edu ds ++=这个二次形式可以决定曲面上曲线的弧长,设曲线(C )上两点)(),(00t B t A .则弧长为 S=⎰⎰++=101022)(2)(t t t t dt dtdv G dt dv dt du F dt du E dt dt ds 从而对曲线弧长的求法提供了一种更简洁的解法.3 利用第一基本形式求曲面上两方向的夹角前面已经提到过曲面),(v u r =上一点(00,v u )的切方向称曲面上的方向,它只能表示为dv v u r du v u r dr v u ),(),(0000 +=.其中),(00v u r u 和),(00v u r v 是过),(00v u 点的坐标曲线的切向量.给定了曲面的参数表示式后u r 和v r 是已知的,因此给出了一方向dr 就等于给出一对值,,dv du 不过方向和dr 的长度无关,所以给出dv du :就能确定曲面的一方向.我们以后经常用(d )dr ,或dv du :表示曲面上的一方向[1](P80-82).给出曲面上两方向(dv du :)和(v u δδ:),我们把向量dv r du r dr v u +=和v r u r r v u δδδ+=间的夹角称为方向(dv du :)和(v u δδ:)间的角. 即222222)(cos v G v u F u E Gdv Fdudv Edu vGdu u dv v du F u Edu δδδδδδδδθ+++++++=.由这个公式可以推出曲面上两个方向(dv du :)和(v u δδ:)垂直的条件是:v Gdv u dv v du F u Edu δδδδ+++)(0=.例 在曲面上一点,含dv du ,的二次方程:0222=++Rdv Qdudv Pdu 确定两个切方向(dv du :)和(v u δδ:).证明这两个方向互相垂直的充要条件是02=+-GP FQ ER .证明 因为dv du ,不能同时为0.不妨假设0≠dv .让0222=++Rdv Qdudv Pdu 两端同除以2dv 可以化为 02)(2=++R dvdu Q dv du P 又因为方程有两个切方向(d )和(δ), 所以v u dv du P Q v u dv du δδδδ⋅⋅-=+2PR =. 但是两方向(d )和(δ)垂直, 则有0)(=+++v Gdv u dv v du F u Edu δδδδ.即 0)(=+++⋅G vu dv du F v u dv du Eδδδδ. 从而得 02=+-+⋅G P Q F P R E . 所以 02=+-GP FQ ER .此外我们还可以求出坐标曲线u -曲线(v =常数)和v -曲线(u =常数)的夹角ω的表达式,因为u r 和v r 是坐标曲线的切向量,所以v u r r,间的夹角ω为: EG F r r r r v v u u =⋅= ωcos .由此推出曲面的坐标网是正交的必要条件是0=F .4 正交曲线族和正交轨线给出两族曲线00=+=+v D u C Bdv Adu δδ, 如果它们正交,由0)(=+++v Gdv u dv v du F u Edu δδδδ可以得出0)(=⋅+++uv du dv G u v du dv F E δδδδ (1) 即 0)(=⋅++-DC B A GD C B A FE 或 0)(=++-GAC BC ADF EBD .如果给出一族曲线0=+Bdv Adu则另一族和它正交的曲线称为这族曲线的正交轨线.从(1)中可以看出正交轨线的微分方程是0)()(=-++-+uv B A u v B A F E δδδδ 即 AGBF AF BE u v ---=δδ 5 利用第一基本形式可求曲面域的面积设曲面S :),(v u r = 给出曲面S 上一个区域D ,我们将推导其面积的计算公式.首先把曲面域用坐标曲线u=常数与v=常数剖分成完整的和不完整的曲边四边形. u-曲线和v-曲线越密,那些完整的曲边四边形就越接近平行四边形,而那些不完整的曲边四边形的面积子整个曲面域面积里所占的比重就越小,以至于可以略去.取以点),(),,(),,(dv v u dv v du u v u +++为顶点的曲边四边形,可以近似地把它换成切平面上的平行四边形.这个平行四边形一以切于坐标曲线的向量du r u 与dv r v 为边.我们把所取的曲边四边形的面积可以认为近似地等于du r u ,dv r v 为边的平行四边形的面积.由于平行四边形的面积等于两边之积再乘以他们夹角的正弦. 于是上述的平行四边形 的面积dudv r r dv r du r d v u v u ⨯=⨯=σ.因此曲面域D 的面积σ可由二重积分来表示:σ的面积=dudv r r d Dv u ⎰⎰⎰⎰⨯= σ 这里的区域D 是曲面域D 相应的),(v u 平面上的区域.由于 0)()(22222>-=-=⨯F EG r r r r r r v u v u v u所以σ 的面积=dudv F EG D⎰⎰-2.由此我们看到的曲面上曲线的弧长,曲面上两方向的夹角以及曲面域的面积都可以用第一基本形式G F E ,,来表示.仅由第一基本形式出发所建立的集合性质称为曲面的内在性质(或内蕴性),以上这些性质都是曲面的内蕴性质.6 等距变换和保角变换上的作用定义1[1](P75-78) 曲面之间的一个变换.如果它保持曲面上任意趋向的长度不变,则这个变化称为等距变换(保长变换).定义2[1](P78-81) 曲面之间的一个变换.如果使曲面上对应曲线的夹角相等,则这个变换称为保角变换(保形变换).显然每一个等距变换都是保角变换,但保角变换一般不是等距变换.而我们在上面所述的曲面的弧长,夹角.,曲面与的面积等都是等距不变量(保长不变量).今后我们把曲面上这种仅仅由G F E ,,表示出来的几何量称曲面的内蕴量.利用等距变换的概念,我们可以把曲面进行一种分类:使等距等价的曲面属于同一类,不等距等价的曲面属于不同类,根据这种分类,则每一个可展曲面和平面是同类的.我们说根据等距等价的曲面有相同的内在性质,因为这样的性质不因曲面的弯曲而改变.当曲面受到弯曲时,曲面的外表(曲面与其所在的外界空间的关系)改变了,但内在性质没有变.例如我们可以把一张弯曲成各式各样的可展曲面,从外表看,他们很不相像,但它们却有完全相同的内在性质.必须指出的是,无论谈等距变换、弯曲、贴合或内在性质,一般总是限于有关曲面的一定范围以内.例如在悬链面和正螺面的等距对应中,悬链面上每一个圆仅仅对应于一条圆柱螺线的一段;圆是闭曲线而圆柱螺线则不是,这两个曲面不但“局部”的内在性质是相同的,而且相关大面积的内在性质也是相同的,但我们不说,它们有相同的“整体(如果不是指相对的整体而是指绝对的整体)的内在性质.”7 曲面的高斯曲率的应用在曲面论的许多问题中,运用的较多的是高斯曲率.设21,k k 为曲面上的一点的主曲率,则它们的乘积21k k 称为曲面在这一点的高斯曲率. 通常以K 表示,即,2221FEG M LN k k K --== 其中vu v u vv uv uu v u u r r r r n n r M n r N n r L r G r r F r E ⨯⨯=⋅=⋅=⋅=>==>=,,,,0,,022.那么如何运用高斯曲率确定曲面的第一基本形式需要进一步的验证.假设曲面S 的高斯曲率是常数.在曲面上取测地平行坐标系),(v u ,因而它的第一基本形式为22),(dv v u G du I +=且),(v u G .满足条件:0),0(,1).0(==v G v G u .根据高斯曲率的内蕴表达式, 有uu u u v vG G E G G E EG K )(1}])([])({[1-=+-= 所以G 作为u的函数,满足二阶常数齐次方程0)(=+G K G uu . 初始条件是0),0()(,1),0(==v G v G u ,根据K 的不同符号,方程(1)在初始条件(2)的解分别是(1)0>K );cos(u K G =(2)0=K 1=G ;(3)0<K ).(u K ch G -=则常曲率曲面的第一基本形式分别为):[2](P62-78)若S 有正常数高斯曲率K , ;)(cos 222dv u K du I += 若S 的高斯曲率为零, 22dv du I +=,若S 有负常数高斯曲率K ,222)(dv u K ch du I -+=.由上面的结论可推出:由相同的常数高斯曲率的曲面,在局部上必定可以彼此建立保长对应. 由此不难看出,高斯曲率是曲面的内蕴量. 在曲面论的研究中发挥了重要作用.对上面的课题的研究只是曲面的第一基本形式的重要推广,而更为重要的是引用曲面的第一基本形式为以后讨论曲面弯曲性质的第二基本形式共同构成了曲面论的基本定律.故对于后面的曲线网及各种曲率都离不开第一基本形式的作用,这里着重讨论了高斯曲率,因为所研究的曲面都是和这个曲率相关的,以及后面的测地线曲率都是和Causs 曲率相关的.而Causs 又有第一基本形式的参数决定,所以第一基本形式是很重要的.8 第一基本形式在实践中的应用在生活实践中,很多方面都涉及到微分几何知识.如何灵活而有效的利用曲面的微分几何知识,显得至关重要.在外形设计上,把它作为曲面造型的辅助工具,是一项富有实用价值的研究课题.近年来这方面的研究也较为活泼,已有相当多的文献给出参数曲面,网络曲面,点云曲面上的测地线的计算方法,以及在蓬帆制造[3](P137-139)、切割或油漆路径设计、光路径设计[4](1467-1475)、流程模拟活动轮廓、机器人行走路径规划等工业领域的应用.还在工程技术的应用、复杂曲面的外板的展开,这种技术在飞机机身、汽车外壳、轮船船体、涡轮叶片、薄壳屋顶等外形设计中有着实际的应用,这一切的一切都与曲面的第一基本形式是不可分割的.。