自动控制原理课件17 5-3对数频率特性
- 格式:ppt
- 大小:815.50 KB
- 文档页数:29
自动控制原理第5章频率特性频率特性是指系统对输入信号频率的响应特点。
在自动控制系统设计中,了解和分析系统的频率特性是非常重要的,因为它可以帮助工程师评估系统的稳定性,性能和稳定裕度。
本章主要介绍频率特性的相关概念和分析方法,包括频率响应函数、频率幅频特性、相频特性、对数坐标图等。
1.频率响应函数频率响应函数是描述系统在不同频率下的输出和输入之间的关系的函数。
在连续时间系统中,频率响应函数可以表示为H(jω),其中j是虚数单位,ω是频率。
频率响应函数通常是复数形式,它包含了系统的振幅和相位信息。
2.频率幅频特性频率幅频特性是频率响应函数的模的图形表示,通常用于表示系统的增益特性。
频率幅频特性通常用对数坐标图绘制,以便更好地显示系统在不同频率下的增益特性。
对数坐标图上,增益通常以分贝(dB)为单位表示。
3.相频特性相频特性是频率响应函数的相角的图形表示,通常用于表示系统的相位特性。
相频特性可以让我们了解系统对输入信号的相位延迟或提前情况。
在相频特性图上,频率通常是以对数坐标表示的。
4. Bode图Bode图是频率幅频特性和相频特性的综合图形表示。
它将频率幅频特性和相频特性分别绘制在纵轴和横轴上,因此可以直观地了解系统在不同频率下的增益和相位特性。
5.系统的稳定性分析频率特性可以帮助工程师判断系统的稳定性。
在Bode图上,当系统的相位角趋近于-180度,且增益在此处为0dB时,系统即将变得不稳定。
对于闭环控制系统,我们希望系统在特定频率范围内保持稳定,以便实现良好的控制性能。
6.频率特性的设计频率特性的设计是自动控制系统设计中的一个重要任务。
工程师需要根据系统对不同频率下的增益和相位的要求,设计出合适的控制器。
常见的设计方法包括校正器设计、分频补偿、频率域设计等。
总结:本章重点介绍了自动控制系统的频率特性,包括频率响应函数、频率幅频特性、相频特性和Bode图。
频率特性的分析和设计对于掌握自动控制系统的稳定性、性能和稳定裕度非常重要。

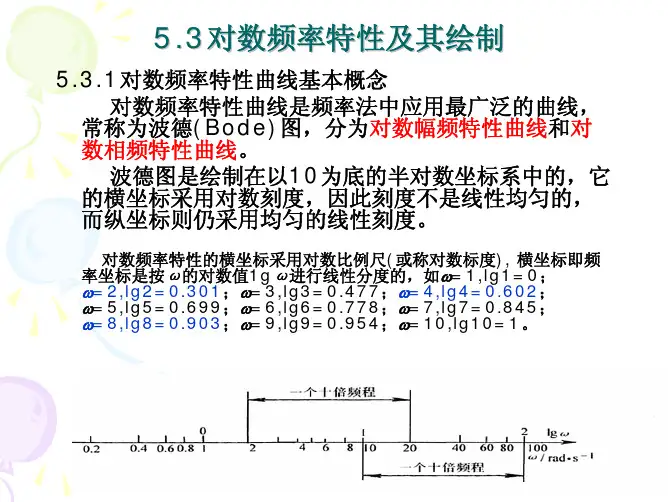
《自动控制原理》第五章线性系统的频域分析与校正西北工业大学自动化学院1.频率特性的基本概念2. 幅相频率特性(Nyquist图)3. 对数频率特性(Bode图)4.频域稳定判据5. 稳定裕度6. 利用开环频率特性分析系统的性能7.利用闭环频率特性分析系统的性能8.频率法串联校正频域分析法特点(1)研究稳态正弦响应的幅值和相角随输入信号频率的变化规律(2)由开环频率特性研究闭环系统的性能(3)图解分析法(4)有一定的近似性5.1 频率特性的基本概念RC 电路如图所示,u r (t )=A sin ωt , 求u c (t )=?建模[]r c=+CR 1U s U ()1()()CR 1c r U s G s ==U s s +例1 r c=+R u i u c=C i u r c c=+CR u u u 频率响应()()()c r s s =====+++T CR 111T CR 1T 11TU G s U s s s 0122222()c +=⋅=+++++1T 1T 1T C A ωC s C U s s s s s ωω02222lim →−==++1T T T 1T s A A C s ωωωω222=+1T A C ωω122-=+T 1T A C ωω222222222222()c ⎡⎤=⋅+⋅−⋅⎢⎥+++++++⎣⎦T 11T 1T 1T 1T 1T 1T A A s U s s s s ωωωωωωωωωRC 电路如图所示,u r (t )=A sin ωt , 求u c (t )=?例1 []T 2222T ()sin cos cos sin 1T 1Tt c A A u t e t t ωωαωαωω−=+⋅−⋅++22−=++T T 1Tt A e ωω频率响应:线性系统稳态正弦响应的幅值、相角随输入频率的变化规律。
22()sin(-arctan T)1T s A c t t ωωω=+()sin r t A tω=RC 电路频率特性G (j ω)的定义:()()()=∠j j j G G G ωωω()sin r t A t ω=22()sin(-arctan T)1T s A c t t ωωω=+22()()()==+s 1j 1T c t G r t ωωs ()()()arctan ∠=∠−∠=−j T G c t r t ωω幅频特性相频特性频率特性的获取方法:()()==j j s G G s ωω=−221arctan T 1T ωω∠+=∠++111j T 1j T ωω1=1+j T ωj 1T 1s ωs =+()sin r t A t ω=22()sin(-arctan T)1T s A c t t ωωω=+系统模型间的关系总结()()()=∠j j j G G G ωωωs 22()()()==+1j 1T c t G r t ωωs ()()()∠=∠−∠=−j arctan T G c t r t ωωG(j ω)的定义:G(j ω)的获取方法:()()==j j s G G s ωω感谢聆听,下节再见。