BIFFI阀门说明书
- 格式:docx
- 大小:24.39 KB
- 文档页数:8

2000ICON 2000:新千年的步伐特点半个多世纪以前,Biffi就已经开始制造阀门执行机构,其不断的创新和敢于面对挑战的能力,奠定了她在世界范围内的领导地位。
1992年,Biffi开始了智能型执行机构的研发,自问世以来,受到全世界主要用户的欢迎,从钻井平台到热带雨林,从寒冷的西伯利亚到严酷的沙漠环境,各种场合都有实际应用。
现在,伴随着ICON2000的诞生,我们又向轻松使用、方便维护迈出了一步。
智能执行机构的优点ICON2000系列与传统产品相比,其智能化优点如下:调试简单调试和试运行阶段是执行机构最容易损坏的时期。
一次好的调试通常能解决执行机构使用时遇到的大部分问题。
智能化执行机构核心参数的初始调试可以通过现场操作接口和自带软件实现,不用拆卸一个螺钉螺母即可完成,从而极大缩短了调试时间,并提高可靠性。
增强型现场操作接口ICON2000执行机构有两个显示窗,用于显示执行机构的动态信息和变量。
上方的窗口可动态显示位置或力矩,下方(两行)显示具体的报警和警告信息等。
在失电和手动操作状态时,位置也能继续显示。
通过现场操作按钮可以对执行机构进行全面的操作,而无须使用其它工具。
用户可以通过设置密码来防止未经授权的操作。
诊断内部电路系统通过不断收集各传感器发来的信息,可连续监视执行机构的状态。
经过综合判断处理可发出各种报警和警告信息,并可用多种语言直接显示,无须繁杂的代码编译。
23更新、更强、更先进…结构更简单可靠,使用更方便结构更简单可靠,使用更方便机械零件数量的减少提高了系统的可靠性并降低了维护费用。
铝合金高强度的外壳,保证了ICON2000能在最恶劣环境中使用。
双重密封将灰尘和潮湿隔离在产品外面。
内部元件的精心选择,提高了整个系统的输出效率(电机直接驱动齿轮),从而降低了操作成本。
提高产品易用性,实现了降低培训成本的目标。
无需编码解码,ICON2000的操作菜单简单明了,并有多种语种选择(意大利语、英语、西班牙语、葡萄牙语、法语、德语)。
一、手动球阀的操作规程1.操作步骤1)检查阀门状态后,开始操作阀门;2)开阀:逆时针方向转动手轮(或手柄),直到阀位指示与管道平行,手轮旋转到位后,回转1/4圈;3)关阀:顺时针方向转动手轮(或手柄),直到阀位指示与管道垂直,手轮旋转到位后,回转1/4圈;4)球阀操作完成后要确认球阀的状态;5)严禁用力过大操作阀门;6)球阀只允许在全开或全关状态下运行,禁止用于节流或在非全开关位运行。
2.维护保养1)球阀应按照月度检查、季度、入冬前维护保养进行;2)球阀应保证一人在不加加力杆的情况下可以操作,如无法操作或操作困难时,则需要对阀门进行处理;3)每年入冬前,打开齿轮箱检查所有齿轮操作内部部件(轴承、齿轮齿等)是否损坏,必要时进行修理或更换,并对齿轮箱内部部件进行充分的清理和润滑,无法打开维护的阀门齿轮箱应定期从注油嘴注入润滑脂;4)检查齿轮箱所有传动部位是否润滑良好;5)如发现齿轮箱内积水,则除去水和旧的润滑脂,重新涂上新的润滑脂;6)检查齿轮箱是否松动,如松动则在阀门全关的状态下进行紧固。
3.球阀内漏的处理3.1阀门内漏的判断:1)常关阀门后端为不带压管线或压力容器,根据压力容器压力的变化来判断阀门内漏:平均每小时每英寸公称直径密封面的泄露量用x V 表示: D - =*)(012T V P V x其中:P1:压力容器初始压力(bar) P2:压力容器检查时压力(bar) V0:压力容器容积(m3) T :时间(hr) D :管线公称直径 (in) Vx 大于0.04m3/hr ·in ,即认为该阀门内漏;2)当无法通过阀门后端的管线或容器来判断阀门是否内漏时,通过排污检查阀门内漏,缓慢打开阀门排污阀将阀腔内气体放空,如阀腔气体无法排空,即认为该阀门内漏;3.2球阀内漏的处理:1)通过阀位观察孔或手动检查阀门是否在全开位或全关位,如阀门不在全开位或全关位则调节至全开位或全关位;2)确定阀座密封脂注咀的数量;对于已进行清洗、润滑维护的阀门,直接注入阀门密封脂;如阀门没有进行清洗、润滑维护,用注脂枪,均匀地在各个注脂咀中缓慢地注入阀门清洗液;1~2天后,注入规定数量的阀门润滑脂,将阀门操作大约2~3次,使阀门润滑脂通过阀座涂到球上;阀门不能全开关时,应开关到可能的最大位;3)如阀门仍存在内漏则说明阀座或球体已存在比较严重的损伤,需要进行更换阀座或维修。
置。
3 3.1 3.2 BIFFI 电动执行机构操作、维护保养规程1 简要说明1.1 操作模式1.1.1远程电动控制:把红色3位选择开关打到REMOTE (远程)位置1.1.2就地电动控制:把红色 3 位选择开关打到LOCAL (就地)位置。
1.1.3停止阀门电动动作:把 3 位选择开关打到OFF(停止)位置。
1.1.4 就地手动操作阀门:通过离合杆和手轮进行操作。
1.1.5 ESD 控制:超越任何模式使得阀门动作到预定的位置。
2 就地电动操作2.1 开阀:逆时针旋转红色旋钮至LOCAL 位置,按右侧黑色OPEN 控制按钮。
2.2 关阀:逆时针旋转红色旋钮至LOCAL 位置,按右侧黑色CLOSE 控制按钮。
2.3 补充说明2.3.1如果执行机构组态选择了保持控制(latched ),按下控制按钮再松开,执行机构将连续动作,中途需要停止,可以按红色STOP (停止)按钮。
2.3.2如果执行机构组态选择了点动控制(push to run ),按住黑色按钮OPEN 或CLOSE ,执行机构一直往开阀方向或关阀方向动作,松开按钮执行机构立刻停止动作。
2.3.3如果组态选择了直接反向控制(latched with instant reverse ),按下反方向按钮会使阀门立刻反向运行。
2.3.4红色选择旋钮可用挂锁锁定所选的LOCAL 、OFF 或REMOTE 中的一个位手动操作旋转红色旋钮至OFF 或LOCAL 位置,旋转手轮即可用手轮操作阀门。
补充说明3.2.1电机通电时电动执行机构自动返回电动操作状态3.2.2离合杆可以用挂锁锁定在电动操作位置或手轮操作位置。
3.2.3不允许在手轮或离合杆使用附加外力工具(套杆、 F 扳手、管钳等),防止损坏阀门。
4 执行机构状态指示4.2 LCD 显示信息说明4.2.1 上排LCD 显示阀位开度百分数。
4.2.2下排LCD 显示状态信息:NORMAL(正常)、ESD/ON(ESD 联锁保护)、ALARM (报警)、WARNING (警告)及执行机构的动作情况,包括OPEN (全开)、OPENING (正在开)、CLOSED(关闭)、CLOSING (正在关闭)、STOP (停止)。
BIFFI ELBS-10破管检测系统技术文件ELBS-10型破管检测系统持续临测管道的压力并在事故时,给执行机构发送信号,驱动阀门至故障安全位置。
其工作所需的电源是6V锂电池组,可使ELBS-10连续工作至少一年以上。
ELBS-10配有功能强大的就地人机操作接口,该接口包括一个两行/16字符LCD显示板和3个按钮(上翻键、下翻键和回车键),可进行该装置的参数设置和显示,另外还可提供一个RS232的串行接口。
一、工作原理ELBS-10采用压力变送器对管线压力进行周期性的数据采集,并将取样值记忆到动态滚动寄存器,该寄存器的形式为先进先出式(FIFO),可以存储256个数据,取样速率可在1到99秒内设定。
压力的变化和压降速率与存储在内存中的设定参数不断进行比较,一个事件定义为当压力或压降速率超出用户的设定值并持续一定时间(可设定)。
当事件发生时后,在FIFO寄存器中的压力值以及相关事件发生之前的88个数据,和之后的168个数据,被转存到数据存储器中。
然后每4个数据取1个到事件数据存贮器中,这样每个事件一共记录64个数据(事件前22个及事件后42个)。
事件数据存贮器共能存贮1000个事件。
ELBS-10将以下种类的事件传送到事件数据存贮器中:事件1----压力降低量超过了设定值(现场可设定)事件2----压力降低至最小值。
(现场可设定)事件3----压力升高量超过了设定值。
(现场可设定)事件4----压力升高至最高值。
(现场可设定)事件5----数据采集状态下,压降速率超过设定值。
(现场可设定)事件6----阀门控制状态下,压降速率超过设定值。
(现场可设定)可以设定以下操作状态:※数据采集与事件有关的数据会被存贮到数据存贮器中,但该事件不驱动阀位动作。
※阀门控制与事件有关的数据仍被存贮到数据存贮器中,但事件2、4、6类,则驱动阀门到故障安全位置。
上述两种状态,可以单独使用,亦可以同时使用,设定点可以相同也可以不同。

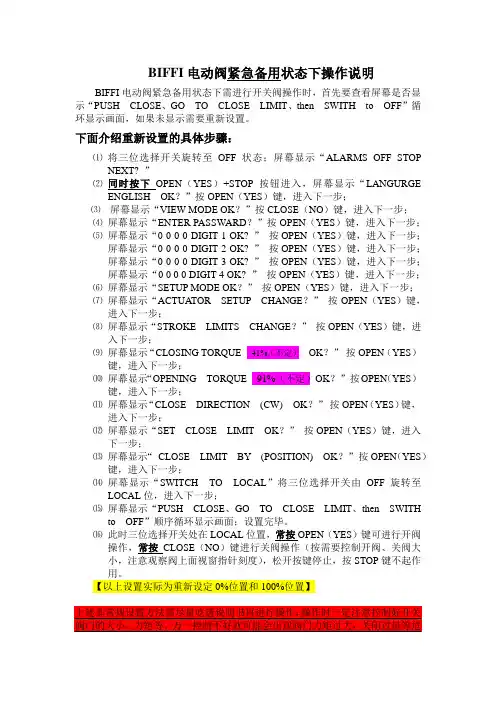
BIFFI电动阀紧急备用状态下操作说明BIFFI电动阀紧急备用状态下需进行开关阀操作时,首先要查看屏幕是否显示“PUSH CLOSE、GO TO CLOSE LIMIT、then SWITH to OFF”循环显示画面,如果未显示需要重新设置。
下面介绍重新设置的具体步骤:⑴将三位选择开关旋转至OFF状态;屏幕显示“ALARMS OFF STOPNEXT? ”⑵同时按下OPEN(YES)+STOP按钮进入,屏幕显示“LANGURGEENGLISH OK?”按OPEN(YES)键,进入下一步;⑶屏幕显示“VIEW MODE OK?”按CLOSE(NO)键,进入下一步;⑷屏幕显示“ENTER PASSWARD?”按OPEN(YES)键,进入下一步;⑸屏幕显示“0 0 0 0 DIGIT 1 OK? ”按OPEN(YES)键,进入下一步;屏幕显示“0 0 0 0 DIGIT 2 OK? ”按OPEN(YES)键,进入下一步;屏幕显示“0 0 0 0 DIGIT 3 OK? ”按OPEN(YES)键,进入下一步;屏幕显示“0 0 0 0 DIGIT 4 OK? ”按OPEN(YES)键,进入下一步;⑹屏幕显示“SETUP MODE OK?”按OPEN(YES)键,进入下一步;⑺屏幕显示“ACTUATOR SETUP CHANGE?”按OPEN(YES)键,进入下一步;⑻屏幕显示“STROKE LIMITS CHANGE?”按OPEN(YES)键,进入下一步;⑼屏幕显示“CLOSING TORQUE 41%(不定)OK?”按OPEN(YES)键,进入下一步;⑽屏幕显示“OPENING TORQUE 91% (不定)OK?”按OPEN(YES)键,进入下一步;⑾屏幕显示“CLOSE DIRECTION (CW) OK?”按OPEN(YES)键,进入下一步;⑿屏幕显示“SET CLOSE LIMIT OK?”按OPEN(YES)键,进入下一步;⒀屏幕显示“CLOSE LIMIT BY (POSITION) OK?”按OPEN(YES)键,进入下一步;⒁屏幕显示“SWITCH TO LOCAL”将三位选择开关由OFF旋转至LOCAL位,进入下一步;⒂屏幕显示“PUSH CLOSE、GO TO CLOSE LIMIT、then SWITH to OFF”顺序循环显示画面;设置完毕。

BIFFI产品培训教材一.气液联动执行器:GPO1.1.拨叉机构简介Biffi 的气液连动执行机构GPO 系列适用于-20℃~+80℃的环境温度,OGK 系列适用于-60℃~+80℃的环境温度。
它们的驱动机构采用非对称或对称式拨叉机构,这种机构的输出扭矩最适合于驱动角行程阀,尤其是球阀。
图1 为球阀的开关行程与所需扭矩的曲线和非对称型拨叉机构在一个行程(0°~90°)的扭矩输出曲线(见左图) ,以及和对称型拨叉机构在一个行程的扭矩输出曲线、衡定输出扭矩机构(如齿轮齿条机构和行星齿轮机构)输出扭矩的比较,这些曲线表明在同尺寸的活塞缸和拨叉情况下,非对称型拨叉机构是最有效最经济的驱动角行程阀门的机构。
但在某些情况下Biffi 仍然可提供对称型拨叉机构的执行机构。
拨叉机构的行程为82°~98°可调,它的调整是靠安装在液压缸上的机械制动螺钉(调整关位)和安装在外壳左侧的机械制动螺钉(调整开位)进行调整的,如果执行机构具有二个液压缸,那么两个机械制动螺钉则全部安装在液压缸两侧。
拨叉机构(2)在旋转时是包托在青铜的衬套(3)里,衬套一头安装固定在外壳的法兰里,而另一头则固定在上盖里,拨叉孔上有键槽用于和阀杆相连。
青铜制的滑块在拨叉槽内滑动时,通过滑销(5)接受来自活塞缸的推力滑块销安装在导向块(7)上,活塞杆(11)用螺钉也固定在导向块上。
导向块通过衬套(9)在导向杆(8)上滑动,衬套为烧结青铜镀聚四氟乙烯构成,可将摩擦力降到最低。
气液连动执行机构的活塞缸是用于液压油的,经过搪磨的活塞缸(10)内膛十份平滑,活塞杆(11)通过安装在外壳端法兰上的导向衬套(12)进行滑动。
同样该衬套为青铜表面上镀有聚四氟乙烯,可将摩擦力的影响降到最低,活塞(13)在活塞缸内滑动,为了确保其滑动方向,在活塞上装了导向聚四氟乙烯环(14) ,以保证滑动方向并提高效率。
活塞和活塞杆的密封都是O 形圈,外包聚四氟乙烯密封环,这种材质可适用于许多种恶劣的环境1.2工作原理气液连动执行机构的动力源是高压天然气,天然气在过滤之后通过流量调节阀进入气液连动罐。
tyco flow control第二部分:操作及设定第一章ICON2000操作1. 手轮操作 212. 电动操作 213. 就地控制 214. 就地指示 225. 3位选择开关锁定 226. 远程控制 227. ICON 2000首次操作 248. 可选择组件24第二章 就地操作1. 就地操作界面说明 242. 设置选项 273. 进入察看模式 274. 进入设置模式 285. 退出察看和设置模式28第三章 31设置菜单第四章 35察看菜单第五章 设置步骤1. 执行机构设置 382. 阀门数据 463. 维护 464. 设置步骤举例 48第六章 察看步骤1.执行机构设置49ICON2000目 录2.铭牌493.阀门数据494.维护505.察看步骤举例51第一章ICON2000操作1. 手轮操作压下离合杆,同时旋转手轮直到齿轮咬合,松开离合杆,即可用手轮操作阀门。
电机通电执行机构返回电动操作。
注意: 除安装在执行机构上的手轮和离合杆外不要用其他工具操作执行机构。
在执行机构手轮或离合杆上使用附加外力工具(棒杆、轮板手、管板手,或其它工具)会造成严重人身伤害和/或损坏执行机构及阀门。
2. 电动操作通电前对照铭牌标注检查电压是否正确,错误的电源输入可能造成电子元件永久性破坏。
执行机构本身提供自动相位校正,所以不用检查电源相位。
将三位选择开关置于OFF 位然后再通电。
在操作执行机构之前需检查执行机构的设置是否符合要求。
使用(VIEW AND SET UP)功能可完成这些 操作。
(见第二章,第4节)3. 就地控制完成执行机构设置后,如果没有报警发生,置3位选择开关到LOCAL 位,然后用OPEN// CLOSE/STOP 按钮进行操作。
当”push to run ”选择后,执行机构可通过持续按下OPEN/YES 或 CLOSE 按钮操作执行机构至希望位置;当松开按钮后,电机断电。
第二部分第一章当”Latched”选择后,当按下OPEN/CLOSE按钮后电机通电,当按钮松开后电机继续运行,只有按下STOP按钮时电机才断电。
第三章电动齿轮控制组的设定1 电动齿轮控制组1.1)组件的位置和识别说明:CT/P:力矩/位置限位开关闭合OT/P:力矩/位置限位开关打开CS1和CS2:闭合位置信号开关OS1和OS2:打开位置信号开关H:反凝结加热器IAS1和IAS2;IBS1和IBS2:辅助限位开关在进程中的任意时刻(可选择的)可调节PT:电位传感器(可选择的)P:力矩/位置回转操纵杆1.2) 常规属性电动控制组具有以下功能:-当阀门到达极限位置时使用CT/P和OT/P力矩限位开关关闭执行器;-整个进程(打开和闭合)中使用CT/P和OT/P限制输出力矩以避免对阀芯造成损坏。
-当达到预先设定的输出力矩值时使用CT/P和OT/P关闭执行器;-当阀门达到极限位置时使用CS1,CS2,OS1和OS2限位开关提供本地的和/或远程的电子信号。
-通过一个本地千分表持续显示阀门的位置;-旁路力矩限制装置机械地排除在打开和闭合进程中的初始部分;这允许执行器提供最大可能力矩,最大可能力矩与大约1.5倍的额定力矩相等。
可选特性:-通过位移传感器PT连续的远程的发送阀门位置的信号;-使用PT位移传感器反馈阀门的位置(在调制装置中);-使用IAS和IBS限位开关电子发信号显示阀门的中间位置。
2 电动阀门的检查和设置2.1)如果阀门和执行器完整连接,检查设定操作已经完成是有必要的。
拆除终端板的盖子,把欧姆表连接在CS1限位开关上。
手动操作执行器,转动手轮,检查指示器指针也发生了旋转。
使指针准确指示到“close”标记,此时开关状态必须发生改变。
把欧姆表连接在OS1限位开关上,使阀门完全打开。
千分表指针准确指示到“open”标记,如上所述,此时开关的状态必须发生了改变。
如果这些检查结果正确,可以假定执行器已经正确设定,可以忽略与电动控制组设定有关的图片。
2.2.)如果执行器没有与阀门相连接,或者2.1中所做测试结果有误,则有必要按照给出的图片调整电气控制组。
GREEN POWER LINE includes the full set of Portable Actuation devices for valves, penstocks and sluice gates equipped with a Li-ion battery engine, offered in two versions: APB120N and APB160N. The output torque (in Nm) and the related output speed (in RPM) of the APB devices are adjustable according to the finger pressure on the accelerator button: when fully pressed, the units operate at their continuous torque value, further reaching their maximum torque when facing resistance during the operation; above these values, a thermal circuit breaker will stop the engine until the next manual ‘reset’. Very simple and easy to use, these devices are the ultimate tool for water operators looking for power on particular sites, such as underground chambers, or in cas e of multiple ‘short’ daily i nterventions on valves and gates, as well as representing a valuable alternative to the ‘classic’ electrified fixed actuation systems.APB120N – Hikoki 36V Brushless engineTechnical dataMax torque : 137 Nm / 101,05 Ft/lbContinuous torque : 95 Nm / 70,06 Ft/lbOutput speed : 114 RPMEngine speed : 25000 RPMReduction ratio : 4,8/1+50/1Engine power : 1000 WBattery : Hikoki 18-36V 4,0 AhDimensions : 340x220x(h)360 mmWeight : 7,2 KgConnection : Q24x24x(h)5 mmAPB160N – Hikoki 36V Brushless engineTechnical dataMax torque : 176 Nm / 129,81 Ft/lbContinuous torque : 168 Nm / 123,91 Ft/lbOutput speed : 78 RPMEngine speed : 25000 RPMReduction ratio : 4,8/1+70/1Engine power : 1000 WBattery : Hikoki 18-36V 4,0 AhDimensions : 340x220x(h)360 mmWeight : 7,2 KgConnection : Q24x24x(h)5 mmAPB120N / APB160N features:(1) Hikoki 36V engine: based on ‘Brushless’ technology, it offers maximum efficiency, power and reliability in an 'eco-friendly' way, guaranteeing a very reduced energy consumption.(2) Gear case: composed by a primary bevel gear in Ergal alloy coupled in axis to a secondary micro-reducer, with the goal to ensure the APB device with sturdiness and high reliability over time.(3) Control Handle: with a practical and soft-grip anatomical shape, it includes the accelerator button and the selectable lever for the rotation on Left/Block/Right positions.(4) Hikoki 36V Battery connection: with a renewed design that makes everything very compact, ergonomic and balanced, it includes also an automatic LED light for night work.(5) Protection cover: made of painted stainless steel, it ensures strength and solidity to the APB device; at the same time, it guarantees the correct ventilation of all the internal electrical parts.(6) Side Handle: mountable on both left/right side of the tool, it facilitates the use of the APB tool to both left and right-handed operators.(7) Thermal circuit breaker: it’s the electrical protection of the tool against any overloads. In case of absorption higher than 16A, the breaker turns off the APB device (un til the manual ‘reset’ of the operator)(8) Anti-rotation Pin:adjustable in its plate, it guarantees a quick, safe and stable fixing of the pin itself during the connection between the APB actuator and the gate/valve.(8) Safety Split:galvanized and with its steel cable, it allows and easy and safe coupling between the APB device and the gate/valve to be moved.(9) Spindle: made of steel, it’s the point where the operator must install the proper bushing in order to transmit the rotation movement from the Portable Actuator to the bevel gear on the gate/valve.APB120N / APB160N Standard supply:(A) Plastic case : with internal shockproof foam padding on the inside, for an easy and safe transport of the APB device to the sites of the daily interventions.(B) N. 02 Hikoki Multivolt 18-36V li-ion batteries : from the latest generation series, they include triple power output (if compared to the previous models) and the convenient LED charge status indicator.The batteries are supplied along with the Hikoki Charger, including features as: fast charging system, USB connection, cooling fan and LED system indicating charging and/or any failure.(C) Shoulder Belt : it must be connected at the support bracket and it allows the operator to easily transport and handle the APB unit during the various stages on the intervention sites.(D) Anti-rotation Pin Set : in three different sizes and interchangeable, they always guarantee the correct and safe ‘block’ of the Portable Actuator to the gate/valve.Usage of the APB/APS Portable Valve Actuators on gates/valvesIn order to transfer the ‘rotation ’ from the Portable Actuator to a bevel gear installed on a gate/valve, it is necessary to install a Bushing (photo 1) on the actuator ’s spindle using the four screws supplied.After that, in consideration of the fact that the APB/APS devices produce a huge Nm output force, it is also necessary to install an Anti-Rotation Flange (photo 2) on the bevel gear of the gate/valve. This avoids the ‘snatch’ rot ation of the APB/APS tool while in operation and prevents any potential injuries to the operator.The safety system is completed by the Anti-Rotation pin and its Safety Split that allow to keep the actuator ‘locked in position’ whil e operating. This is a safety mechanism required by law. The manufacturing company is not responsible for any damage to people (o properties) resulting from its failure or incorrect use.Therefore, once the correct bushing has been installed on the APB/APS and the proper A-R flange on the bevel gear, all that’s left to do is to connect the bushing to the reducer’s shaft, make sure that the A-R pin enters the A-R flange, then close it using its safety split. Now, you are 100% ready to operate.Photo 3 shows this connection phase (this procedure is the same for both sluice gates/penstocks/valves)1. Bushings (to mount on the APB/APS)2. A-R Flanges (to mount on the bevel gear)3. Connection of the APB/APS to the gearbox shaftAbout interventions on multiple series of gates/valvesWhen planning to operate on several gates/valves with bevel gear shafts of different diameters, it is necessary to standardize them all by installing a series of Adaptors with male square 24x24mm that fits the ‘standard’ square 24x24mm female bushing on the APB/APS tool.All the Adaptors (photo 4) have a 24x24mm square male connection and a cylindrical female part of different sizes. It is therefore necessary to identify in advance which types are necessary, and then proceed with their installation along with the corresponding anti-rotation flange; after this installation work, it will be possible to operate on all gates/valves without continuous changes of bushing (photo 5). However, at this point it will no longer be possible to use the original hand-wheels. So, in order to perform manual interventions again, it will be necessary to use the Square 24mm Hand Crank , that combined with the Padlocking Kit allows also to lock the bevel gear on the gate/valve (photo 6) in order to avoid unauthorized movements.4. Q24x24 adaptor mounted on the bevel gear5. Connection of APB/APS to A-RFlange+Q24 adaptor6. Q24 hand crack + locking system on bevel gearManual emergency interventions on electric actuators‘Emergency operations’ are all those manual interventions, performed on Electrified Actuators in absence of electricity, using the small manual hand-wheel on the body of the actuator itself.With the aim of providing a full service to its Customers, Scapin has designed and created a series of custom kits to install on the emergency of the most common models of AUMA / BIFFI / DREHMO / ROTORK electrical actuators.The installation of these Emergency Kits is very simple: once the hand-wheel has been removed from the electric actuator, it will be sufficient to mount the adaptor and the anti-rotation flange using the supplied screws. After that, the emergency can be performed using an APB/APS device.Once the intervention has been completed and the Portable Actuator disconnected, it is possible to both remove the Emergency Kit, or leave it installed. On this last situation, it is possible to restore the manual hand-wheel as it was originally by mounting an appropriate Q24 adaptor (supplied with the kit) on it and then, if necessary, lock it using a removable padlock (see the photos below).The usage of the APB devices is highly recommended on Drehmo electric actuators, in order to not burden its emergency output shaft with excessive weight. On the other hand, Auma and Biffi actuators can be easily handled with all the APS devices.Emergency Kit on AUMA Electrict Actuator Emergency Kit on BIFFI Electrict Actuator Emergency Kit on DREHMO Electric ActuatorAPB/APS tool on AUMA Electrict Actuator APB/APS tool on BIFFI Electrict Actuator APB/APS tool on DREHMO Electric ActuatorVisit our YouTube Channel to see our HD videos showing the APB/APS devices at work。
F6125HDUButterfly Valve with Lug typesResilient Seat, 304 Stainless Steel DiscType overviewTypeDN F6125HDU125Technical dataFunctional dataValve size [mm]5" [125]Fluidchilled or hot water, up to 60% glycol Fluid Temp Range (water)-22...250°F [-30...120°C]Body Pressure Rating ANSI Class Consistent with 125, 232 psi CWP Close-off pressure ∆ps 50 psiFlow characteristic modified equal percentage Servicing maintenance-free Flow Pattern 2-way Leakage rate0%Controllable flow range 90° rotation Cv1022 Maximum Velocity 12 FPS Lug threads3/4-10 UNCMaterialsValve body Ductile cast iron ASTM A536Body finish epoxy powder coating (blue RAL 5002)Stem 416 stainless steel Stem seal EPDM (lubricated)SeatEPDMPipe connection for use with ANSI class 125/150 flanges Bearing RPTFEDisc304 stainless steel Gear operator materialsGears - hardened steel Suitable actuatorsNon-SpringGRB(X)PRB(X)F6125HDU Product featuresFlow/Mounting detailsDimensionsType DN WeightF6125HDU12519 lb [8.6 kg]Valve with GRB, GRX ActuatorA B C D E F Number of Bolt Holes10.8" [275] 2.3" [58]16.7" [425]12.4" [315] 4.9" [124] 4.9" [125]8F6125HDUValve with GRB..N4, GRX..N4 ActuatorA B C D E F Number of Bolt Holes14.4" [366] 2.3" [58]19.8" [502]15.4" [391] 4.9" [124] 4.9" [125]8NEMA 4X, Modulating Control, Non-SpringReturn, Direct Coupled, 24 V, Multi-Function Technology®Technical dataElectrical dataNominal voltageAC/DC 24 V Nominal voltage frequency 50/60 HzNominal voltage rangeAC 19.2...28.8 V / DC 21.6...28.8 V Power consumption in operation 8 W Power consumption in rest position 2.5 W Transformer sizing 11 VAElectrical Connection Terminal blocksOverload Protectionelectronic thoughout 0...90° rotation Functional dataOperating range Y 2...10 VOperating range Y note 4...20 mA w/ ZG-R01 (500 Ω, 1/4 W resistor)Input Impedance600 ΩOperating range Y variable Start point 0.5...30 V End point 2.5...32 VOperating modes optional variable (VDC, on/off, floating point)Position feedback U 2...10 V Position feedback U note Max. 0.5 mA Position feedback U variable VDC variableDirection of motion motor selectable with switch 0/1Manual override under cover Angle of rotation 90°Angle of rotation note adjustable with mechanical stop Running Time (Motor)150 s / 90°Running time motor variable 90...150 s Noise level, motor 45 dB(A)Position indicationMechanically, 30...65 mm stroke Safety dataPower source ULClass 2 Supply Degree of protection IEC/EN IP66/67Degree of protection NEMA/UL NEMA 4XEnclosure UL Enclosure Type 4XAgency ListingcULus acc. to UL60730-1A/-2-14, CAN/CSA E60730-1:02, CE acc. to 2014/30/EU and 2014/35/EU Quality Standard ISO 9001Ambient humidity Max. 100% RH Ambient temperature -22...122°F [-30...50°C]Ambient temperature note -40...50°C for actuator with integrated heating Storage temperature -40...176°F [-40...80°C]Servicingmaintenance-free WeightWeight9.9 lb [4.5 kg]FootnotesMaterialsHousing material Die cast aluminium and plastic casing†Rated Impulse Voltage 800V, Type of action 1.AA, Control Pollution Degree 3AccessoriesGatewaysDescriptionType Gateway MP to BACnet MS/TP UK24BAC Gateway MP to Modbus RTU UK24MOD Gateway MP to LonWorksUK24LON Electrical accessoriesDescriptionType Battery backup system, for non-spring return models NSV24 US Battery, 12 V, 1.2 Ah (two required)NSV-BAT Auxiliary switch 1 x SPDT add-on S1A Auxiliary switch 2 x SPDT add-onS2AFeedback potentiometer 140 Ω add-on, grey P140A GR Feedback potentiometer 1 kΩ add-on, grey P1000A GR Feedback potentiometer 10 kΩ add-on, grey P10000A GR Feedback potentiometer 2.8 kΩ add-on, grey P2800A GR Feedback potentiometer 500 Ω add-on, grey P500A GR Feedback potentiometer 5 kΩ add-on, greyP5000A GR ToolsDescriptionTypeConnection cable 10 ft [3 m], A: RJ11 6/4 ZTH EU, B: 3-pin Weidmüller and supply connectionZK4-GEN Service Tool, with ZIP-USB function, for programmable and communicative Belimo actuators, VAV controller and HVAC performance devicesZTH US Factory add-on option onlyDescriptionTypeHeater, with adjustable thermostatN4 Heater Add-on 24V (-H)Electrical installationINSTALLATION NOTESProvide overload protection and disconnect as required.Actuators may also be powered by DC 24 V.Only connect common to negative (-) leg of control circuits.A 500 Ω resistor (ZG-R01) converts the 4...20 mA control signal to 2...10 V.Control signal may be pulsed from either the Hot (Source) or Common (Sink) 24 V line.For triac sink the Common connection from the actuator must be connected to the Hotconnection of the controller. Position feedback cannot be used with a triac sink controller; theactuator internal common reference is not compatible.IN4004 or IN4007 diode. (IN4007 supplied, Belimo part number 40155).Actuators are provided with a numbered screw terminal strip instead of a cable.Actuators may be controlled in parallel. Current draw and input impedance must be observed.Master-Slave wiring required for piggy-back applications. Feedback from Master to controlinput(s) of Slave(s).Meets cULus requirements without the need of an electrical ground connection.Warning! Live electrical components!During installation, testing, servicing and troubleshooting of this product, it may be necessary to work with live electrical components. Have a qualified licensed electrician or other individual who has been properly trained in handling live electrical components perform these tasks. Failure to follow all electrical safety precautions when exposed to live electrical components could result in death or serious injury.Wiring diagramsOn/Off Floating PointVDC/mA Control Primary - Secondary。
第三章电动齿轮控制组的设定1 电动齿轮控制组1.1)组件的位置和识别说明:CT/P:力矩/位置限位开关闭合OT/P:力矩/位置限位开关打开CS1和CS2:闭合位置信号开关OS1和OS2:打开位置信号开关H:反凝结加热器IAS1和IAS2;IBS1和IBS2:辅助限位开关在进程中的任意时刻(可选择的)可调节PT:电位传感器(可选择的)P:力矩/位置回转操纵杆1.2) 常规属性电动控制组具有以下功能:-当阀门到达极限位置时使用CT/P和OT/P力矩限位开关关闭执行器;-整个进程(打开和闭合)中使用CT/P和OT/P限制输出力矩以避免对阀芯造成损坏。
-当达到预先设定的输出力矩值时使用CT/P和OT/P关闭执行器;-当阀门达到极限位置时使用CS1,CS2,OS1和OS2限位开关提供本地的和/或远程的电子信号。
-通过一个本地千分表持续显示阀门的位置;-旁路力矩限制装置机械地排除在打开和闭合进程中的初始部分;这允许执行器提供最大可能力矩,最大可能力矩与大约1.5倍的额定力矩相等。
可选特性:-通过位移传感器PT连续的远程的发送阀门位置的信号;-使用PT位移传感器反馈阀门的位置(在调制装置中);-使用IAS和IBS限位开关电子发信号显示阀门的中间位置。
2 电动阀门的检查和设置2.1)如果阀门和执行器完整连接,检查设定操作已经完成是有必要的。
拆除终端板的盖子,把欧姆表连接在CS1限位开关上。
手动操作执行器,转动手轮,检查指示器指针也发生了旋转。
使指针准确指示到“close”标记,此时开关状态必须发生改变。
把欧姆表连接在OS1限位开关上,使阀门完全打开。
千分表指针准确指示到“open”标记,如上所述,此时开关的状态必须发生了改变。
如果这些检查结果正确,可以假定执行器已经正确设定,可以忽略与电动控制组设定有关的图片。
2.2.)如果执行器没有与阀门相连接,或者2.1中所做测试结果有误,则有必要按照给出的图片调整电气控制组。
3.电气连接检查接线图上显示的端子号与盖子反面的端子位置布局一致。
从完全闭合的状态手动移动阀门圆盘/球。
按下打开按钮,核对执行器相应地移动到打开状态。
如果打开控制信号引起阀门闭合,直接按下控制板上的“STOP”健停止操作。
交换两条供电线的位置,重复操作。
再次开动电机,为检查开关动作可以正确执行,手动操纵力矩/位置回转操纵杆P来阻碍打开力矩/位置开关,此时执行器停止运转。
重复上述操作检查闭合进程。
执行器安装有整体启动器IS 2000:一个自动相位校正/鉴相器建立在整体启动器中;两种不同的工作模式可通过下沉开关选择:1)自动相位校正通过相位传感允许执行器独立正确地运转;2)相位鉴相器限制执行器,当错误接收相位时发出本地远程报警。
如果按下开关不能启动电机,需要检测供电线的相位。
4力矩和位置设定必要设备:一个3mm的内六角扳手4.1)阀门型号和设置选择根据阀门型号进行操作,执行器可以使用力矩/位置限位开关停止,如下所述:阀门型号:前置密封蝶阀闭合:力矩打开:位置阀门型号:球形阀,蝶阀,旋塞阀闭合:位置打开:位置在任何操作之前,需要拧下可调机械停止。
夹住固定螺母,拧下机械停止保护。
去掉密封垫圈。
用合适的艾伦内六角扳手卡住机械停止,同时拧开固定螺母一周。
拧下约10mm的机械停止。
对另一个机械停止重复上述操作。
限位开关操作设定齿轮有个A区域(电子信号区域)和一个B区域(位置停止区域);齿轮在A区域中必须和滚子保持接触。
按如下指示顺时针关闭阀门。
反之亦然,逆时针打开阀门。
4.2)在关闭状态时使用限位开关阀门停止调整电动操作阀门直到它接近关闭。
顺时针转动手轮使阀门完全关闭。
松掉关闭齿轮的固定螺丝,旋转齿轮直到限位开关通过区域B中的相同齿轮(前文提到的)操纵CT/P。
把齿轮固定在这个位置。
电动操作阀门使其部分打开。
在关闭状态电动操作阀门直到执行器自动停止:检查阀门上的圆盘或标记。
拧关闭机械停止,直到它进入终止进程。
从这个位置拧开半圈,用固定螺母固定。
检查机械停止的突出部分:一个90度(正负5度)的进程,长度L应该在以下值的范围内:尺寸最小长度最大长度放回密封垫圈,重装机械停止保护。
固定防护盖。
电动操作使阀门部分打开。
沿关闭方向电动操作阀门直到执行器自动停止。
手动关闭阀门直到它机械停止,检查齿轮仍操纵微开关CT/P、如需反向操作重复此调整。
检查限位开关CS1和CS2准确跳动。
执行器停止时齿轮的位置取决于位置限位开关。
滚筒由B区域的齿轮操控。
检查滚筒臂推动螺丝,操纵回转操纵杆;得到停止和位置信号。
闭合阀门的电子信号:完成调整同时定位引起执行器自动停止的齿轮。
4.3)在打开状态用位置限位开关调整阀门电动操作阀门至接近打开的位置,手动打开阀门确保达到理想位置。
松开打开齿轮的固定螺丝,转动它直到区域B的齿轮操纵开关OT/P.把齿轮固定在这个位置。
确保设置正确,重复在关闭设定中所描述的操作,包括机械停止的设定。
打开阀门的电子信号:与“关闭阀门的电子信号”相同,用OS1代替CS1。
4.4)用力矩限位开关调整阀门关闭力矩限位开关可以在闭合和打开进程中始终操作。
执行器的输出力矩在控制组的铭牌上显示;闭合和打开力矩的可能设定范围都是从25%到100%。
设定值可以从刻度尺上的百分比指数读出。
为设定理想值,手动旋转可以增大或减小的螺丝就能够满足。
注意:额定力矩的最大设定值(最大设定)比标签上显示的100%范围值小,为防止执行器有减小的额定力矩,Biffi使用一个合适的间隔减小指示进程。
范围始终有效,参照范围值100%。
例如:范围值100%=1,000Nm为正确调整输出力矩,知道闭合和打开阀门做需要的力矩值是必要的:一个稍高的力矩值已被设定。
通常这个操作由阀门制造商在测试电动阀门时完成;为使阀门紧固设定值必须比所需值略高。
如果没有设定或者执行器安装在现有的阀门上,力矩限制装置应该设定为一个等于阀门制造商和执行器额定力矩建议值之间的比例。
例如:建议值:150 mkg执行器额定力矩:250mkg设定的百分比150/250=60%电子信号:上述步骤完成后,在关闭状态阀门由力矩设定为停止;设定齿轮的电信号也是有必要的。
关闭阀门。
松开关闭齿轮的固定螺丝,转动它直到开关CS1和CS2由区域A中的齿轮操纵。
固定齿轮在这个位置。
电动操作阀门到部分打开的位置。
在关闭状态电动操作阀门直到执行器以力矩限制装置的方式自动停止。
核查限位开关CS1和CS2由齿轮操作,并且它们准确的跳变。
当执行器由力矩限制装置阻碍停止时齿轮的位置:辊子由区域A中的齿轮操纵。
检查在辊臂和螺丝之间留有0.5到1mm的间距。
拧上关闭机械停止直到它进入终止进程。
在这里松开它半转,用固定螺母固定。
检查机械停止的突出部位,如同前文所提到的。
如果反向过程存在重复该调整。
另外,考虑到在打开状态阀门由力矩停止,上文中,包括机械停止的设定,用“打开”替换“关闭”,描述仍适用。
5 设定辅助限位开关的跳变点必要装备:一个3mm的内六角扳手。
在标准版本中,辅助开关组由两组开关组成:IAS1和IAS2;IBS2和IBS2。
每组开关由一个单独的齿轮控制,因此每组开关的跳变是联立的。
每组开关的跳变在阀门进程中的任何时刻是可调整的。
每组开关的跳变是由相应的齿轮作用在相关操纵杆上发生的。
5.1)设定限位开关CS,OS,IAS,IBS的跳变点必要装备:一个2.5mm的内六角扳手。
为满足特殊需要,在特定情况下一些开关的设定与其它开关相比必须略微延时。
用2.5mm的内六角扳手调整叶片弹簧的螺丝操纵开关(细节1):顺时针调整螺丝得到延时的跳变,逆时针调整螺丝得到超前的跳变。
注意:从起始位置旋转调整螺丝不要超过三转,避免损坏操纵杆。
用欧姆表连接在两个开关上比较跳变点的不同来检查跳变的设定。
第四章本地指示器指示位置的设定1闭合状态指示的调整关闭阀门。
移去开关盒的盖子。
转动低处的指示盘(白色的)直到CLOSED标识垂直向下。
安上开关盒的盖子,不要固定,检查指示盘上的CLOSED标识准确地与盖子上的箭头相对。
如前文所描述,校正任何可能的不同。
2打开状态指示的调整自动地完全打开阀门。
转动高处的指示盘(透明的)直到OPEN标识垂直向下。
在这个过程中要注意不要误碰到低处圆盘。
安上开关盒的盖子,不要固定,检查指示盘上的OPEN标识准确地与盖子上的箭头相对。
如前文所描述,校正任何可能的不同。
固定开关盒盖子确保O型圈在它的位置上。
第五章电阻型位移传感器的设定位移传感器提供满量程值的命令需要。
根据阀门进程传递的实际电阻值从额定满量程的75%变化到100%;传感器控制的所有设备上的可调装置确保由电位计驱动的设备正确运转。
电动关闭阀门直到执行器自动停止。
把欧姆表分别连接在零点和传感器滑动器上。
提升传感器臂,转动传感器滑动器调整轴直到欧姆表显示一个传感器满量程的5%的值。
注意:传感器总电阻值标记在它的外围上。
不连接欧姆表,操作执行器,自动打开阀门,注意此时传感器的电阻值。
从这个值中减去阀门关闭状态时预先设定的电阻值:从而获得实际电阻值(涉及实际的阀门进程),以正确调整由传感器控制的设备。
如果需要,为了最优化传感器的输出值,可以改变齿轮驱动传感器的减速比。
拧下传感器臂的固定螺丝。
注意:臂由内部弹簧加载,一旦拧下固定螺丝,臂将回到初始位置。
这个小弹簧装置确保传感器小齿轮总是很好的从动于多齿齿轮,因此减小齿轮间隙并且易于调整。
滑动支撑杆上的传感器臂,使传感器小齿轮和需要的多齿齿轮咬合:大齿轮增大输出值的范围,小齿轮减小输出值范围。
把内六角扳手插入闭锁螺丝,旋转衬套大约半周,把衬套固定在这个位置。
重复前面的操作检验新的输出值。