最新舵机控制详解.pdf
- 格式:pdf
- 大小:230.89 KB
- 文档页数:9
舵机工作原理与控制方法舵机是一种用于控制机械装置的电机,它可以通过控制信号进行位置或角度的精确控制。
在舵机的工作原理和控制方法中,主要涉及到电机、反馈、控制电路和控制信号四个方面。
一、舵机的工作原理舵机的核心部件是一种称为可变电容的设备,它可以根据控制信号的波形来改变电容的值。
舵机可分为模拟式和数字式两种类型。
以下是模拟式舵机的工作原理:1.内部结构:模拟式舵机由电机、测速电路、可变电容和驱动电路组成。
2.基准电压:舵机工作时,系统会提供一个用于参考的基准电压。
3.控制信号:通过控制信号的波形的上升沿和下降沿来确定舵机的角度。
4.反馈:舵机内部的测速电路用于检测当前位置,从而实现位置的精确控制。
5.驱动电路:根据测速电路的反馈信号来控制电机的转动方向和速度,从而实现角度的调整。
二、舵机的控制方法舵机的控制方法一般采用脉冲宽度调制(PWM)信号来实现位置或角度的控制。
以下是舵机的两种常见控制方法:1.脉宽控制(PWM):舵机的控制信号是通过控制信号的脉冲宽度来实现的。
通常情况下,舵机的控制信号由一系列周期为20毫秒(ms)的脉冲组成,脉冲的高电平部分的宽度决定了舵机的位置或角度。
典型的舵机控制信号范围是1ms到2ms,其中1ms对应一个极限位置,2ms对应另一个极限位置,1.5ms对应中立位置。
2.串行总线(如I2C或串行通信):一些舵机还支持通过串行总线进行控制,这些舵机通常具有内置的电路来解码接收到的串行信号,并驱动电机转动到相应的位置。
这种控制方法可以实现多个舵机的同时控制,并且可以在不同的控制器之间进行通信。
三、舵机的控制电路与控制信号1.控制电路:舵机的控制电路通常由微控制器(如Arduino)、驱动电路和电源组成。
微控制器用于生成控制信号,驱动电路用于放大和处理控制信号,电源则为舵机提供所需的电能。
2.控制信号的生成:控制信号可以通过软件或硬件生成。
用于舵机的软件库通常提供一个函数来方便地生成适当的控制信号。
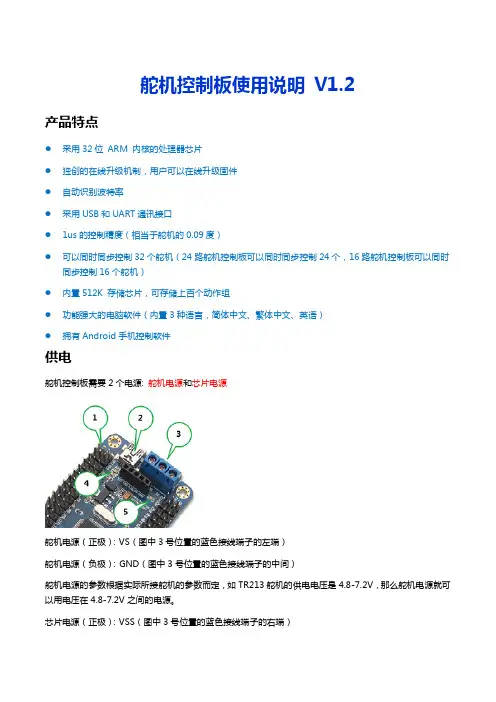
舵机控制板使用说明V1.2产品特点●采用32位ARM 内核的处理器芯片●独创的在线升级机制,用户可以在线升级固件●自动识别波特率●采用USB和UART通讯接口●1us的控制精度(相当于舵机的0.09度)●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时同步控制16个舵机)●内置512K 存储芯片,可存储上百个动作组●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语)●拥有Android手机控制软件供电舵机控制板需要2个电源: 舵机电源和芯片电源舵机电源(正极):VS(图中3号位置的蓝色接线端子的左端)舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间)舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。
芯片电源(正极):VSS(图中3号位置的蓝色接线端子的右端)芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间)VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。
另外:1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。
2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必须是5V。
3. 图中1、2、3号位置都可以给芯片供电,任选其一即可。
4. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表示芯片供电异常。
5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表示舵机供电异常。
如果需要控制舵机,2个绿色的LED灯都亮是前提条件。
安装驱动驱动下载地址:/down/USC_driver.exe (区分大小写)直接双击USC_driver.exe ,点击下一步即可安装驱动。
舵机的控制方式和工作原理介绍舵机是一种常见的电动执行元件,广泛应用于机器人、遥控车辆、模型飞机等领域。
它通过电信号控制来改变输出轴的角度,实现精准的位置控制。
本文将介绍舵机的控制方式和工作原理。
一、舵机的结构和工作原理舵机的基本结构包括电机、减速装置、控制电路以及输出轴和舵盘。
电机驱动输出轴,减速装置减速并转动输出轴,而控制电路则根据输入信号来控制电机的转动或停止。
舵机的主要工作原理是通过PWM(脉宽调制)信号来控制。
PWM信号是一种周期性的方波信号,通过调整占空比即高电平的时间来控制舵机的位置。
通常情况下,舵机所需的控制信号频率为50Hz,即每秒50个周期,而高电平的脉宽则决定了输出轴的角度。
二、舵机的控制方式舵机的控制方式主要有模拟控制和数字控制两种。
1. 模拟控制模拟控制是指通过改变输入信号电压的大小,来控制舵机输出的角度。
传统的舵机多采用模拟控制方式。
在模拟控制中,通常将输入信号电压的范围设置在0V至5V之间,其中2.5V对应于舵机的中立位置(通常为90度)。
通过改变输入信号电压的大小,可以使舵机在90度以内左右摆动。
2. 数字控制数字控制是指通过数字信号(如脉宽调制信号)来控制舵机的位置。
数字控制方式多用于微控制器等数字系统中。
在数字控制中,舵机通过接收来自微控制器的PWM信号来转动到相应位置。
微控制器根据需要生成脉宽在0.5ms至2.5ms之间变化的PWM信号,通过改变脉宽的占空比,舵机可以在0度至180度的范围内进行精确的位置控制。
三、舵机的工作原理舵机的工作原理是利用直流电机的转动来驱动输出轴的运动。
当舵机接收到控制信号后,控制电路将信号转换为电机驱动所需的功率。
电机驱动输出轴旋转至对应的角度,实现精准的位置控制。
在舵机工作过程中,减速装置的作用非常重要。
减速装置可以将电机产生的高速旋转转换为较低速度的输出轴旋转,提供更大的扭矩输出。
这样可以保证舵机的运动平稳且具有较大的力量。
四、舵机的应用领域舵机以其精准的位置控制和力矩输出,广泛应用于各种领域。
舵机原理及控制舵机原理及控制第一章:引言舵机是一种用来控制机械设备运动的装置,广泛应用于航空、汽车、机器人等各个领域。
本章将介绍舵机的基本概念和其在实际应用中的重要性。
第二章:舵机工作原理2.1 舵机概述舵机是一种能够转动到特定角度的电机,其内部结构包括电机、减速机构和反馈控制系统。
舵机通过接收控制信号来控制转动角度,然后通过反馈控制系统使得舵机转动到目标位置。
2.2 舵机工作原理舵机的电机通过控制信号接收到电源,电机产生转动力矩,并通过减速机构将高速低扭的电机输出转化为低速高扭的输出。
同时,反馈控制系统监测舵机位置,并与目标位置进行比较,若有差异,则调整电机输出力矩,直到舵机转动到目标位置。
第三章:舵机控制方法3.1 PWM控制PWM(脉冲宽度调制)是一种常用的舵机控制方法。
通过调整脉冲信号的占空比,控制舵机转动的角度。
一般而言,脉冲信号周期为20ms,脉宽在0.5ms至2.5ms之间,其中1.5ms表示中立位置。
通过改变脉宽,可以将舵机转动到不同的角度。
3.2 PID控制PID(比例-积分-微分)是一种反馈控制方法,可用于舵机控制中的位置闭环控制。
PID控制通过比较目标位置与实际位置之间的差异,计算出控制器的输出值。
比例项决定控制器的输出与误差之间的线性关系,积分项和微分项则用于消除稳态误差和防止控制器过冲。
第四章:舵机在实际应用中的案例分析4.1 航空领域舵机广泛应用于飞机和其他飞行器的操纵系统中。
通过控制舵面的运动,可以实现飞行器的方向调整和姿态稳定。
4.2 汽车领域在汽车行业中,舵机被应用于转向系统中。
通过控制舵机转动到不同角度,实现车辆的方向转向。
4.3 机器人领域舵机是机器人运动的重要部件。
通过控制舵机的转动,可以使机器人的各个关节运动,实现复杂的动作。
在以上几个实际应用的案例中,舵机的原理和控制方法起到了至关重要的作用,使得舵机在现代技术中具有广泛的应用前景。
综上所述,舵机是一种用来控制机械设备运动的装置,其工作原理包括电机、减速机构和反馈控制系统。

舵机基本控制⽅法控制任务
舵机的位置控制
电路设计
见下图
程序设计
1 #include <Servo.h> //舵机驱动头⽂件
2 Servo myservo; // 定义舵机对象
3int pos = 0; // 定义舵机初始位置
4
5void setup()
6 {
7 myservo.attach(9); // 设置舵机控制针脚
8 }
9
10void loop()
11 {
12for(pos = 0; pos < 180; pos += 1) // 0到180旋转舵机,每次延时50毫秒
13 {
14 myservo.write(pos);
15 delay(50);
16 }
17for(pos = 180; pos>=1; pos-=1) // 180到0旋转舵机,每次延时50毫秒
18 {
19 myservo.write(pos);
20 delay(50);
21 }
22 }
运⾏效果
舵机连续左右摆动近180度,循环
舵机控制原理
图1 微型舵机实物图
图2 舵机接线定义
图3 舵机位置控制原理
脉冲宽度在0.5ms 到2.5ms 之间时,与之对应的舵机转⾓为0°~180°。
注因为⽤到了舵机库函数,舵机信号线只能接控制板的9或11⼝。
舵机正反转怎么控制舵机正反转的控制方法第一章:引言舵机是一种常见的电动装置,用于控制机械系统的方向和位置。
舵机通常用于机器人、模型车辆、航空模型等系统中。
舵机的正反转控制是实现这些系统运动的关键。
本论文将介绍舵机正反转控制的原理和方法。
第二章:舵机工作原理舵机通常由电机、控制电路和反馈器件组成。
电机负责驱动舵机的转动,控制电路接收输入信号并输出合适的电压和电流控制电机,反馈器件用于检测舵机的位置信息。
当输入信号改变时,控制电路会调整输出电压和电流以控制舵机的转动方向和角度。
第三章:舵机正反转控制方法舵机正反转控制是指控制舵机在正转和反转之间切换。
常用的方法是通过控制输入信号的周期和占空比来实现。
周期是指输入信号一次完整的波形所用的时间,占空比则是指输入信号高电平所占的时间比例。
当输入信号的周期和占空比符合一定的规律时,舵机可以进行正转和反转。
第四章:实验验证为了验证舵机正反转控制的方法,进行了一系列实验。
首先,构建了一个简单的舵机控制电路,包括输入信号发生器、控制电路和舵机。
接着,设置不同的输入信号周期和占空比,并观察舵机的转动情况。
实验结果显示,当输入信号的周期和占空比满足特定的条件时,舵机的转动方式会发生变化。
结论通过本论文的研究,我们了解了舵机正反转控制的原理和方法。
舵机正反转的实现是通过控制输入信号的周期和占空比来完成的。
本论文还进行了一系列实验验证了舵机正反转控制方法的有效性。
舵机正反转控制方法的研究对于机械系统的运动控制具有重要意义,并且在实际应用中具有广泛的应用前景。
第一章:引言舵机在许多机械系统中扮演着至关重要的角色。
无论是汽车方向盘的控制、机器人的姿态调整,还是航空模型的飞行控制,舵机正反转控制都是实现这些系统运动的关键。
本章将介绍本论文的研究目的和意义,以及本文的结构。
第二章:舵机工作原理舵机是基于电动机原理的控制装置,其基本工作原理是将电能转化为机械运动。
舵机由电机、控制电路和反馈器件组成。

舵机的分类按照舵机的转动角度分有180度舵机和360度舵机。
180度舵机只能在0度到180度之间运动,超过这个范围,舵机就会出现超量程的故障,轻则齿轮打坏,重则烧坏舵机电路或者舵机里面的电机。
360度舵机转动的方式和普通的电机类似,可以连续的转动,不过我们可以控制它转动的方向和速度。
按照舵机的信号处理分为模拟舵机和数字舵机,它们的区别在于,模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置。
关于PWM信号在3.4节将会介绍。
3.2 舵机的内部结构一般来说,我们用的舵机有以下几个部分组成:直流电动机、减速器(减速齿轮组)、位置反馈电位计、控制电路板(比较器)。
舵机的输入线共有三根,红色在中间,为电源正极线,黑色线是电源负极(地线)线,黄色或者白色线为信号线。
其中电源线为舵机提供6V到7V左右电压的电源。
3.3 舵机的工作原理在舵机上电后,舵机的控制电路会记录由位置反馈电位计反馈的当前位置,当信号线接收到PWM信号时会比较当前位置和此PWM信号控制所要转到得位置,如果相同舵机不转,如果不同,控制芯片会比较出两者的差值,这个差值决定转动的方向和角度。
3.4 舵机的控制协议对舵机转动的控制是通过PWM信号控制的。
PWM是脉宽调制信号的英文缩写,其特点在于它的上升沿与下降沿的时间宽度或者上升沿占整个周期的比例(占空比)。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
本书介绍的舵机控制协议是北京汉库公司出品的舵机所采用的协议 ,市场上一些其他厂商(包括有些日本厂商)生产的舵机也采用这种协议。
如果你采用的是其它厂商的舵机,最好先参考下他们的DATA手册或者产品说明之类的技术文档。
前面说过舵机分180度和360度,它们的应用场合不一样,工作方式不一样,自然控制的协议也不一样。
舵机控制流程图常规舵机控制流程图1.5ms脉宽)带动电位器柄旋舵机电路方框图0.5—2.5msDC马达舵机说明1,电机经过变速(减速)后连接到电位器柄旋转2,输入脉冲宽度为0.5—2.5ms,周期为3ms—20ms(数字舵机的脉冲周期因不同的客户使用的周期不同,常用为10ms;模拟舵机周期为20ms.)3,脉冲宽度,表示电位器转动的角度不同(即舵臂角度不同) 4,电机转速为14000/分钟,减速比为250:1,要求舵角转速为0.10-0.2S/60度(此部份与电机转速有关,程序方面需注意及时扫描电位器角度而给电机改变不同供电方式),扫描不及时易出现舵臂回抖现象.5,脉冲宽度不变的情况下,能锁住电机.6,堵转4秒钟后,电机进入低压供电(或PWM少占空比)工作模式,堵转一旦去除,电机供电进入正常模式.程序其它要求(因客户要求不同,需做不同类型的舵机)1,马达供电PWM(周期或占空比可调)2,电位器角度识别精度可调(1023分,255分,511分..)3,舵转动角度可调(-90 +90度)参考电路图:VR15KR1220C4104123J1CON3VDDS11G12S23G24D25D26D17D18U1UD4606GS11G12S23G24D25D26D17D18U2UD4606GVDDVDDVSS1P3.0/SCL2SDA/P3.13VPP/P3.24ADC8/P005ADC9/P016ADC10/P027ADC11/P038ADC12/P049ADC13/P0510ADC14/P0611ADC0/P1012ADC1/P1113ADC2/P1214ADC3/P1315ADC4/P1416ADC5/P1517ADC6/P1618ADC7/P1719VDD20U3SC51P5708SN+C210uin3G1o u t2U4XC6206-33+C310USinSin3.3V3.3VR3220KR4220K A-+MG1MOTOR SERVO R21KC1104o u t1o u t2o u t3o u t4o u t1o u t2o u t3o u t4mo ter正转1111反转111111STOP STOPSTOP 电机正转电机反转不良舵机现象:1,堵转保护人为堵转电机时,约3秒后电机进入低电流(即低压,占空比少)供电方式,用以降低电机损耗而保护舵机.堵转一旦去除,电机需立即进入正常供电方式.不良现象:A,无保护功能B,堵转去除后电机不能马上进入正常状态2,马达抖动轻微外力作用舵臂时,因电位器角度有此而有细微变化(如:0.02度)下,马达转动以校正角度差.不良现象:A,马达校正时力度过大在,是出现抖动现象.(如角度差与电机供电时间或PWM没有建立关系;全压供电方式)堵转保护流程图无刷舵机控制流程图。

sg90舵机使用手册【最新版】目录1.SG90 舵机的概述2.SG90 舵机的使用方法3.SG90 舵机的编程技巧4.SG90 舵机的应用实例5.SG90 舵机的注意事项正文一、SG90 舵机的概述SG90 舵机是一种常用的舵机,广泛应用于机器人、无人机等领域。
它可以通过 PWM 信号控制旋转角度,具有响应速度快、精度高等特点。
SG90 舵机的旋转角度为 90 度,可以通过编程控制实现连续旋转。
二、SG90 舵机的使用方法1.连接电路:将 SG90 舵机与微控制器相连接,通常需要连接三根线,分别是电源线、地线和信号线。
2.设置 PWM 信号:通过微控制器发送 PWM 信号,控制舵机的旋转角度。
PWM 信号的频率范围一般为 50-1000Hz,信号占空比为 0-2.55V。
3.调试:通过调整 PWM 信号的频率和占空比,观察舵机的旋转情况,以确保舵机正常工作。
三、SG90 舵机的编程技巧1.使用 PWM 库:针对不同的微控制器,可以使用相应的 PWM 库,简化 PWM 信号的生成和控制。
2.设置舵机的中立位:在编程时,可以设置舵机的中立位,使得舵机在没有接收到信号时停留在特定的角度。
3.使用多个舵机:如果有多个舵机需要同时控制,可以在程序中使用多个 PWM 信号,分别控制各个舵机的旋转角度。
四、SG90 舵机的应用实例1.机器人控制:SG90 舵机可以用于机器人的关节控制,实现机器人的精确运动。
2.无人机控制:SG90 舵机可以用于无人机的飞行控制,实现无人机的稳定飞行。
3.智能家居:SG90 舵机可以用于智能家居的控制,例如智能窗帘、智能门窗等。
五、SG90 舵机的注意事项1.在使用 SG90 舵机时,需要确保电路连接正确,避免短路等情况。
2.在编程时,需要根据实际情况设置 PWM 信号的频率和占空比,以确保舵机正常工作。
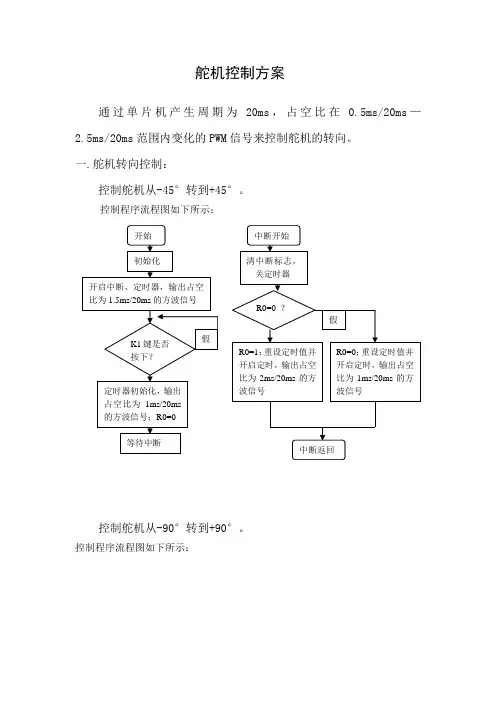
舵机控制方案
通过单片机产生周期为20ms ,占空比在0.5ms/20ms —2.5ms/20ms 范围内变化的PWM 信号来控制舵机的转向。
一.舵机转向控制:
控制舵机从-45°转到+45°。
控制程序流程图如下所示:
控制舵机从-90°转到+90°。
控制程序流程图如下所示:
二.舵机转速测量
将以扇形纸板固定在舵盘上,在舵机从-45°—+45°(或-90°—+90°)位置之间的-30°—+30°角线的适当位置制作两小孔(下图A ,B 处为红外对管信息采集通道),以给红外射对管提供信息传递通道。
这样就可以在这两个信息通道采集舵机在转过60°范围的起始位置和结束位置的信号变化,将采集到的信号经过比较器(LM393)整形后送入单片机进行处理(这里可将整形后的数字变化信号进行定时中断处理),就可以获得舵机在转过60°范围的起始位置和结束位置过程中需要的时间值,并将时间值通过数码管显示出来。
从而测得舵机的转速值。
红外对管测速结构图如下所示:
三.转矩测量:
舵机扭矩的单位是K g·cm,可以理解为在舵盘上距舵机轴中心水平距离1cm 处,舵机能够带动物体重量。
舵机的工作原理和PWM信号控制分析(二)引言概述:在上一篇文章中,我们已经初步了解了舵机的工作原理以及PWM信号的基本概念。
本文将继续深入探讨舵机的工作原理,并详细分析PWM信号在舵机控制中的运用。
正文:一、舵机的工作原理1. 电机运转原理- 舵机内部装有电动机,通过电能转换为机械能。
- 电机通常采用直流无刷电机,具有高效率和长寿命的特点。
2. 位置反馈系统- 舵机内部配备位置反馈系统,用于检测舵盘位置并实时反馈给控制器。
- 位置反馈系统通常采用编码器或霍尔传感器等装置。
3. 控制器- 舵机的控制器根据接收到的控制信号和位置反馈信号,计算出应去的位置,并驱动电机转动到该位置。
- 控制器的设计和算法决定了舵机的精度和响应速度。
二、PWM信号的概念1. PWM信号的产生- PWM信号是一种脉冲宽度调制信号,由一个高电平和一个低电平组成。
- 通过改变高电平和低电平的持续时间比例,可以调整PWM信号的占空比。
2. PWM信号在舵机中的作用- PWM信号被用于控制舵机的位置。
- 控制器根据接收到的PWM信号的占空比,确定舵盘应该转到的位置。
三、PWM信号与舵机的工作原理的关系1. PWM信号与位置控制- 不同的PWM信号占空比对应不同的位置输入。
- PWM信号的占空比与舵盘位置的关系可以通过试验得到,从而建立校准模型。
2. PWM信号与速度控制- 通过改变PWM信号的占空比可以改变舵盘旋转的速度。
- PWM信号的频率也会影响到舵机的响应速度。
四、PWM信号控制舵机的注意事项1. PWM信号的频率选取- 通常舵机的工作频率在50Hz到300Hz之间,选择合适的频率可以保证舵机的正常工作。
- 过低的频率可能导致舵机颤动或者无法工作。
2. PWM信号的占空比设置- 根据舵机的校准模型,设置PWM信号的占空比可以精确控制舵盘的位置。
- 过大或过小的占空比可能导致舵盘不能准确到达期望位置。
五、总结本文深入探讨了舵机的工作原理以及PWM信号在舵机控制中的应用。
目录一.舵机PWM信号介绍 (1)1.PWM信号的定义 (1)2.PWM信号控制精度制定 (2)二.单舵机拖动及调速算法 (3)1.舵机为随动机构 (3)(1)HG14-M舵机的位置控制方法 (3)(2)HG14-M舵机的运动协议 (4)2.目标规划系统的特征 (5)(1)舵机的追随特性 (5)(2)舵机ω值测定 (6)(3)舵机ω值计算 (6)(4)采用双摆试验验证 (6)3.DA V的定义 (7)4.DIV的定义 (7)5.单舵机调速算法 (8)(1)舵机转动时的极限下降沿PWM脉宽 (8)三.8舵机联动单周期PWM指令算法 (10)1.控制要求 (10)2.注意事项 (10)3.8路PWM信号发生算法解析 (11)4.N排序子程序RAM的制定 (12)5.N差子程序解析 (13)6.关于扫尾问题 (14)(1)提出扫尾的概念 (14)(2)扫尾值的计算 (14)一.舵机PWM信号介绍1.PWM信号的定义PWM信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。
具体的时间宽窄协议参考下列讲述。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
目前,北京汉库的HG14-M舵机可能是这个过渡时期的产物,它采用传统的PWM协议,优缺点一目了然。
优点是已经产业化,成本低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM格式。
但是它是一款数字型的舵机,其对PWM信号的要求较低:(1) 不用随时接收指令,减少CPU的疲劳程度;(2) 可以位置自锁、位置跟踪,这方面超越了普通的步进电机;图1-1其PWM格式注意的几个要点:(1) 上升沿最少为0.5mS,为0.5mS---2.5mS之间;(2) HG14-M数字舵机下降沿时间没要求,目前采用0.5Ms就行;也就是说PWM波形可以是一个周期1mS的标准方波;(3) HG0680为塑料齿轮模拟舵机,其要求连续供给PWM信号;它也可以输入一个周期为1mS的标准方波,这时表现出来的跟随性能很好、很紧密。
舵机是标准PWM信号来驱动的,一般PWM控制信号的周期为20ms,其调制波如图3.8所示。
当给舵机输入脉宽为0.5ms,即占空比为0.5/20=2.5%的调制波时,舵机右转90度;当给舵机输入脉宽为1.5ms,即占空比为1.5/20=7.5%的调制波时,舵机静止不动;当给舵机输入脉宽为2.5ms,即占空比为2.5/20=12.5%的调制波时,舵机左转90度。
可以推导出舵机转动角度与脉冲宽度的关系计算公式为:
注:其中t为正脉冲宽度(ms);θ为转动角度;当左转时取加法计算,右转时取减法计算结果。
图3.8 舵机驱动PWM波形
PWM脉宽与舵机转角的对照关系如表3.3所示:
表3.3 PWM脉宽与舵机转角的对照关系
无人驾驶导航车的方向就是靠调节舵机的转角来实现的,在软件上是通过算法对PWM波占空比进行实时设置,对应舵机转角发生变化,从而使无人驾驶导航车完成各种不同的转向。
最新版32路舵机控制器使用说明书舵机控制器说明图解如下:1)安装驱动详见《驱动》文件夹,按照里面的说明自行操作。
2)上位机软件页面介绍说明双击上位机软件,打开软件界面,如下图:左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口。
舵机图标可自由拖拉。
“保存位置”:保存的位置一定要跟上位机软件在同一个目录下,以后才能从选择那里直接打开,保存到其他文件夹无效。
“复位图标”:32个滑竿图标可以全部恢复到初始位置。
“极限切换”:极限值有两种状态,分别是P500~2500和P600~2400,针对不用的舵机使用,此按钮可以切换滑竿图标的极限状态。
一般情况下不使用。
“舵机回中”:可以使得32个滑竿全部归位到P1500的状态(中间位置),故称舵机回中。
“打开偏差B“:打开机器人偏差文件。
“保存偏差B”:保存机器人偏差文件。
--------------------------------------------------------------------------- COM口选择端,选择正确的COM口后,点击连接。
“多路“是用于多台机器人控制,一般情况下不使用。
动作组调试运行窗口:动作组下载及调用窗口:初始化:上位机软件初始化,表示从开始地址256号位置开始写动作,只是对软件操作,而不改变已经下载到主板上的动作。
擦除:对下载到主板上的动作组做清空操作。
擦除后需要点击初始化。
运行动作组:运行已经下载到主板上的动作组。
停止:停止运行动作组。
脱机运行:运行已经下载到主板上的动作组,并且下次开机直接执行该动作组。
禁用:禁用脱机运行。
可以添加音乐,添加后,在播放音乐前打勾勾,点击动作组运行,可以使得音乐同步播放!----------------------------------------------------------------------------舵机滑竿可以随意拖动B表示舵机偏差(默认为0),即舵机的相对位置范围为-100----100,双击B,可以激活,B由灰色变成黑色,即可调节B值。
舵机按键控制完整版#include#define Sevro_moto_pwm P2_7 //接舵机信号端输入PWM信号调节速度sbit k1=P2^4;sbit k2=P2^5;int n;unsigned char pwm_val_left = 0;//变量定义unsigned char zhuan =14;//舵机归中,产生约,1.5MS 信号unsigned int timer=0; //延时基准变量unsigned char timer1=0; //扫描时间变量void delay(int x){int i,j;for(i=x;i>0l;i--){for(j=255;j>0;j--);}}void COMM( void ){if(k1==0) //如果第一个按键按下{++n;}if(k2==0) //如果第二个按键按下{--n; //N减1}zhuan=n;if(n>=23){n=23;}if(n<=5){n=5;}}void main(void){ TMOD=0X11;TH1=(65536-100)/256; //100US定时TL1=(65536-100)%256;TH0=0;TL0=0;TR1= 1;ET1= 1;ET0= 1;EA = 1;n=14;zhuan=14; //舵机归中while(1) /*无限循环*/{if(timer>=1000) //100MS检测启动检测一次{timer=0;COMM(); //方向函数}}void pwm_Servomoto(void){if(pwm_val_left<=zhuan)Sevro_moto_pwm=1; //信号输出线elseSevro_moto_pwm=0;//信号输出线if(pwm_val_left>=200)pwm_val_left=0;}/*TIMER1中断服务子函数产生PWM信号*/void time1()interrupt 3 using 2{TH1=(65536-100)/256; //100US定时TL1=(65536-100)%256;timer++; //定时器100US为准。