基于delaunay三角剖分的三维地形生成
- 格式:pdf
- 大小:531.23 KB
- 文档页数:6
一次性构建约束Delaunay三角网的三维显示摘要:本文主要介绍了一次性构建约束Delaunay三角网算法的具体步骤,在VC++6.0编程环境中利用该算法对大量离散数据点进行三维建模,并结合OpenGL对三角网模型进行三维显示。
关键词:约束;Delaunay;三角网;算法;VC++6.0;OpenGL1 前言地图数据往往是离散的数据点集,要生成三维地形图的技术路线是:(1)从地形图中取得离散点的高程数据;(2)采用约束Delaunay三角网对离散点进行三维建模;(3)采用OpenGL对所建模型进行三维图形生成和显示[1].传统构建约束Delaunay三角网的算法即所谓的“两步法”[2],将构建过程分为两步:第一步构建常规Delaunay三角剖分;第二步将约束边强行嵌入到常规Delaunay三角剖分结果中。
传统方法的缺点是要对无约束数据和约束数据进行分别管理,具有数据管理凌乱的缺点;而且,当常规三角网生成后再加入约束边数据重新修改三角网,具有固有的时间效率低的缺点。
笔者提出了一种一次性构建约束Delaunay三角网算法。
该算法没有继承传统的构建约束Delaunay三角网的“两步法”,而是先将约束边的点数据和无约束数据一起存入点数据链表,根据点的属性生成约束边链表,再以各约束边为基边生成左右三角形,构成初始三角网,然后以左右三角形的除约束边的另外两边为基边,用一步生长法生成新的一层三角形,再以新生成的一层三角形的边为新的基边用一步生长法生成新的三角形,直到生成完整的约束Delaunay三角网。
最后,用简化的LOP优化算法对三角网进行优化。
建立模型后,将OpenGL中的三个库(opengl32.lib、glut32.lib和glu32.lib)与VC相连,实现开发环境与OpenGL的结合,将点Z坐标值也参与构网,同时设计像素格式、选择视点及投影模式、选定光源、计算出每个点的法向量及进行光照渲染等各项处理,最终生成三维三角网。
三维空间 delaunay三角剖分的分治算法
三维空间的Delaunay三角剖分可以使用分治算法来实现。
分
治算法是一种将问题分解成更小的子问题来解决的算法思想。
以下是三维空间Delaunay三角剖分的分治算法的基本步骤:
1. 将输入的点集P按照x坐标进行排序,得到有序点集P_x。
2. 对P_x进行分割,将点集分成两部分,左边部分为P_l,右
边部分为P_r。
3. 递归调用Delaunay三角剖分算法,分别对P_l和P_r进行处理。
这两个子问题可以分别在不同的处理器或线程上进行处理,从而加快算法的执行速度。
4. 将子问题的结果合并,得到整体的Delaunay三角剖分结果。
在递归调用Delaunay三角剖分算法时,同样的分治策略可以
应用到三维空间中。
对于每一个子问题,可以按照y坐标对点集进行排序,然后再递归地将子问题分割成更小的子问题。
当子问题中的点个数达到一个阈值时,可以使用其他的三维空间Delaunay三角剖分算法进行解决,如增量法或基于四面体的
方法。
通过使用分治算法,可以将大问题划分成许多小问题,并行地解决这些小问题,从而提高算法的执行效率。
同时,在三维空间中使用分治算法可以减少问题的复杂性,使得算法更易于实现和理解。
《三维delaunay三角剖分算法:深度和广度兼具的全面评估》一、介绍三维Delaunay三角剖分算法,又称无缝三角网格生成算法,是计算几何学中一种重要的算法。
它以点云数据为基础,能够快速高效地生成三维空间中的三角剖分,是计算机图形学、计算机辅助设计等领域中常用的重要工具。
二、算法原理和流程1. 点云数据输入三维Delaunay三角剖分算法的输入是一组点云数据,表示了三维空间中的一些离散点,这些点将作为三角剖分的顶点。
2. 建立三角形网格算法首先通过连接这些离散点,构建初始的三角形网格。
根据一定的规则和约束,逐步优化这个初始网格,使其满足一定的性质和条件。
3. 确定Delaunay性质算法的关键是确定Delaunay性质,即任意一个空间中的点集构成的三角剖分,如果其外接圆不含有其他点,则成为Delaunay三角剖分。
通过不断地优化和调整三角形的位置,使得生成的三角剖分满足Delaunay性质。
4. 输出优化后的三角剖分经过多轮优化和调整后,算法会输出一个高质量的Delaunay三角剖分,这个剖分可以用于计算几何中的相关问题和应用。
三、深度探讨三维Delaunay三角剖分算法1. 算法性能的分析三维Delaunay三角剖分算法的性能主要取决于输入的点云数据的规模和分布。
对于规模较大的数据,算法的运行效率可能会有所下降,需要进行合理的优化和加速。
2. 应用领域的广度三维Delaunay三角剖分算法在地质勘探、工程设计、地理信息系统等领域有着广泛的应用。
它能够帮助人们更好地理解和分析三维空间中的复杂结构和关系。
3. 数据结构和算法优化算法的实现和优化涉及到许多数据结构和计算几何的算法技术,需要深入研究和理解这些方面的知识,才能进一步提升三维Delaunay三角剖分算法的性能和效率。
四、总结和回顾三维Delaunay三角剖分算法是一种重要的计算几何算法,它在三维空间中能够高效地生成无缝的三角剖分,具有广泛的应用前景。
注册|登录∙构建全球华人科学博客圈∙返回首页∙RSS订阅∙帮助MouStudio --- The Base of YANG Qing分享/u/moustudio爽的还是程序的人生∙博客首页∙动态∙记录∙博文∙相册∙主题∙分享∙好友∙留言板∙学术名片博文Captain Dialog 2009-09-18 VC+OpenGL 实现空间三维Delaunay三角剖分已有 4164 次阅读2009-9-19 14:43|个人分类:编程笔记|系统分类:科研笔记|关键词:Delaunay三角剖分,算法程序,VC++Captain Dialog 2009-09-18三维建模和等值面的绘制过程中,需要经常使用三角形网格对数据体进行构面。
而三角形的生成基于Delaunay三角剖分的算法实现的。
前段时间一直在考虑数据体的任意剖面切割该怎么做,但是一直被两个问题所困扰,一个就是交点问题,然后就是对所求交点进行绘制问题(三角形网格面构造)。
终于在半个月后有了一点收获。
1 Delaunay三角剖分原理三角剖分算法可以分为针对二维的局部剖分和三维的全局剖分算法。
在二维情况下建立的基于简单的三角形构面的方式,而三维情况下则是需要建立基于四面体的方式构造空间曲面。
在遇到三维空间散乱点的构面问题时,可以直接采用三维Delaunay剖分,亦可先将三维坐标预处理转换到二维坐标系中,间接的采用二维Delaunay剖分算法。
想着用最简单的方式实现功能的时候,就选择了第二种方式。
关于二维的Delaunay三角剖分原理,文献资料相当多,随便一搜就是一大堆,网上也有很不错的介绍:Delaunay三角剖分(Delaunay Triangulation)相关知识:/soroman/archive/2007/05/17/750430.html[图形算法]Delaunay三角剖分算法:/renliqq/archive/2008/02/06/1065399.html关于生成三角形网格的算法也是很多,我选择了稍微老套点的生长法,实现起来还算是思路清晰。
基于Delaunay三角形的三维数字地图生成算法
刘承香;赵玉新;刘繁明
【期刊名称】《计算机仿真》
【年(卷),期】2003(020)005
【摘要】潜艇应用地形匹配技术是近年来导航技术领域的研究新方向,而海底数字地图的制作是潜艇海底地形匹配定位技术的基础.该文首先给出了电子海图水深数据的提取方法,然后基于处理大规模散乱数据的Delaunay三角形,提出了一种利用电子海图水深数据模拟形成三维数字高程模型(DEM)的算法,最后进行了数字仿真,仿真结果证明该算法是可行的.该文提出的新思路对海底数字地图的模拟具有重要的参考价值,为海底地形匹配定位技术的研究提供了必要的前提.
【总页数】4页(P22-24,77)
【作者】刘承香;赵玉新;刘繁明
【作者单位】哈尔滨工程大学自动化学院,哈尔滨,150001;哈尔滨工程大学自动化学院,哈尔滨,150001;哈尔滨工程大学自动化学院,哈尔滨,150001
【正文语种】中文
【中图分类】TP317.4
【相关文献】
1.三维并行约束Delaunay网格生成算法及实现 [J], 张晓蒙;陆忠华;张鉴
2.基于OpenMP的三维并行Delaunay网格生成算法及实现 [J], 张晓蒙;陆忠华;张鉴
3.一种三维散乱点局部降维Delaunay网格自动生成算法 [J], 张书睿;张鹏程;
4.三维可视化应用中Delaunay三角形剖分算法研究 [J], 聂焱;杨杰
5.三维点集Delaunay三角剖分的自动生成与修改算法 [J], 崔汉国;胡瑞安;金瑞峰;杨叔子
因版权原因,仅展示原文概要,查看原文内容请购买。
tin与等高线的生成方法地形表面的形态是地球表面自然地貌的反映,因此地形表面的形态研究对于地球科学研究具有重要意义。
地形表面的形态通常使用高程值来描述,高程值的获取是地形表面形态研究的基础。
在地形表面形态研究中,TIN(三角网)和等高线是最常用的两种表达方式。
TIN 是一种由三角形构成的不规则网格,等高线是一种连接等高线点的线。
本文将介绍TIN和等高线的生成方法。
一、TIN的生成方法TIN的生成方法是将地形表面的高程点按照一定的规则构成不规则网格,从而形成一个由三角形构成的表面。
TIN的生成方法主要有以下几种:1. 基于三点构成三角形的方法基于三点构成三角形的方法是最常用的TIN生成方法,其基本思想是将地形表面的高程点按照一定的规则构成不规则网格,从而形成一个由三角形构成的表面。
该方法的具体步骤如下:(1)选取一个地形表面高程点作为起点;(2)选取一个距离起点最近的高程点作为第二点;(3)选取一个距离第一点和第二点最近的高程点作为第三点;(4)根据三点构成一个三角形;(5)将构成的三角形加入TIN中;(6)将第三点作为起点,继续选取距离最近的点,重复步骤(3)至(5),直到所有高程点都被加入TIN中。
2. Delaunay三角剖分方法Delaunay三角剖分是一种基于三点构成三角形的方法,其特点是任意两个三角形的外接圆不相交。
该方法的具体步骤如下:(1)选取一个地形表面高程点作为起点;(2)选取一个距离起点最近的高程点作为第二点;(3)选取一个距离第一点和第二点最近的高程点作为第三点;(4)根据三点构成一个三角形;(5)将构成的三角形加入Delaunay三角剖分中;(6)将第三点作为起点,继续选取距离最近的点,重复步骤(3)至(5),直到所有高程点都被加入Delaunay三角剖分中。
二、等高线的生成方法等高线是连接等高线点的线,它是描述地形表面形态的一种常用方式。
等高线的生成方法主要有以下几种:1. 等高线插值法等高线插值法是一种通过已知高程点插值推算等高线的方法。
基于Delaunay三角网格剖分算法在三维造型中的研究作者:王牌来源:《科学与财富》2014年第06期摘要:在对三维图像进行有限元数值模拟解析时,为了对连续的计算区域进行数值计算,达到模拟仿真的效果,必须先对三维图像进行网格剖分。
Delaunay三角网格剖分算法是生成网格的一种有效方法。
本文介绍了Delaunay三角网格剖分算法,以及在约束条件下的网格细分,最后给出了该算法在三维实体造型中的应用。
关键词:三角剖分;网格生成;网格细分Abstract: In the simulation analysis of the 3D finite element numerical, in order to carry out the numerical calculation for the calculation of continuous area, achieve the simulation results, we must first on the 3D mesh. Delaunay triangulation algorithm is an effective method to generate mesh. This paper introduces the Delaunay triangulation algorithm, and in the condition of mesh subdivision, finally the application of the algorithm in 3D solid modeling are given in this paper.Keywords: triangulation,mesh generation,mesh subdivision1、引言网格生成是有限元模拟计算的先决条件,有限元计算的效率和精确度在很大程度上受生成的网格质量的影响。
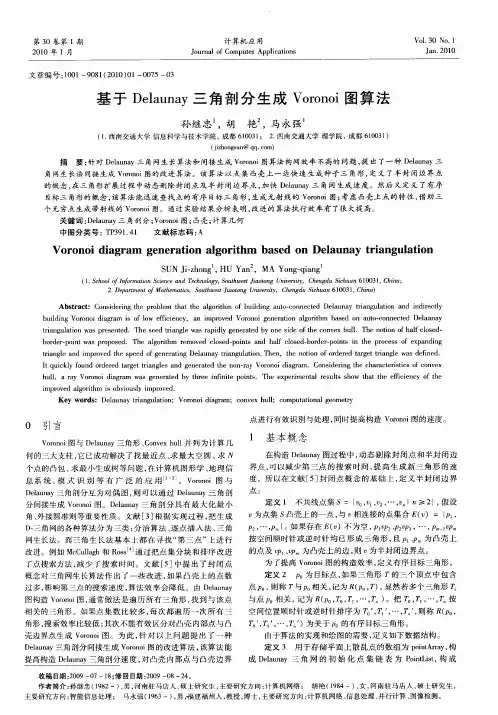
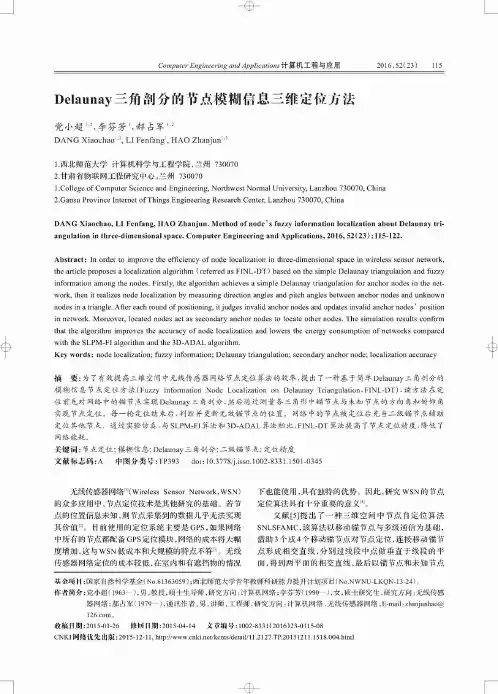
Computer五计算机工程与应用2016,52(23) 115 D e la u n a y三角剖分的节点模糊信息三维定位方法党小超12,李芬芳、郝占军12DANG Xiaochao1'2, LI Fenfang1, HAO Zhanjun121.西北师范大学计算机科学与工程学院,兰州7300702. 甘肃省物联网工程研究中心,兰州7300701.C o lle ge o f C o m puter Science and E n g in e e rin g,N o rth w e st N o rm a l U n iv e rs ity,La nzh ou730070, C h ina2. Gansu P rovince Intern et o f T hin gs E ngin eering Research C enter,La nzh ou730070, C hinaD A N G X ia o c h a o,L I F e n fa n g,H A O Z h a n ju n.M e th o d o f n o d e's fu z z y in fo rm a tio n lo c a liz a tio n a b o u t D e la u n a y t r ia n g u la tio n in th re e-d im e n s io n a l space.C o m p u te rE n g in e e rin g a n d A p p lic a tio n s,2016, 52(23): 115-122.A b s tr a c t:In order to im p ro ve the e ffic ie n c y o f node lo c a liz a tio n in three-dim ensional space in w ireless sensor n e tw o rk, the a rticle proposes a lo c a liz a tio n a lg o rith m(re fe rre d as F IN L-D T)based on the sim ple D elaunay tria n g u la tio n and fu zzy in fo rm a tio n am ong the nodes.F irs tly,the a lg o rith m achieves a sim ple D elaunay tria n g u la tio n fo r anchor nodes in the netw o rk,then it realizes node lo calizatio n b y m easuring d irectio n angles and p itch angles between anchor nodes and u n kn o w n nodes in a trian gle.A fte r each round o f po sitio n in g,it judges in v a lid anchor nodes and updates in v a lid anchor nodes’position in n e tw o rk.M o re o ve r,located nodes act as secondary anchor nodes to locate other nodes.The sim u la tio n results c o n firm that the a lg o rith m im proves the accuracy o f node lo c a liz a tio n and low ers the energy con sum p tion o f ne tw orks com pared w ith the S L P M-F I a lg o rith m and the3D-A D A L a lg o rith m.K e y w o rd s:node lo c a liz a tio n;fu z z y in fo rm a tio n;D elaunay tria n g u la tio n;secondary anchor node;lo c a liz a tio n accuracy摘要:为了有效提高三维空间中无线传感器网络节点定位算法的效率,提出了 一种基于简单D e la u n a y三角剖分的 模糊信息节点定位方法(F uzzy In fo rm a tio n N ode L o c a liz a tio n on D elaunay T ria n g u la tio n,F IN L-D T),该方法在定 位前先对网络中的锚节点实现D e la u n a y三角剖分,然后通过测量各三角形中锚节点与未知节点的方向角和俯仰角 实现节点定位。
三维空间Delaunay三角剖分算法的研究及应用一、本文概述随着计算几何和计算机图形学的发展,三维空间Delaunay三角剖分算法已成为一种重要的空间数据处理和分析技术。
本文旨在全面深入地研究三维空间Delaunay三角剖分算法的原理、实现方法以及应用领域。
本文将对三维空间Delaunay三角剖分算法的基本概念和性质进行详细的阐述,包括其定义、性质、特点以及与其他三角剖分算法的比较。
接着,本文将重点探讨三维空间Delaunay三角剖分算法的实现方法,包括增量法、分治法和扫描转换法等,并分析它们的优缺点和适用范围。
本文还将对三维空间Delaunay三角剖分算法在各个领域的应用进行详细的介绍和分析。
这些领域包括计算机科学、地理信息系统、地质学、气象学、生物医学等。
通过具体的应用案例,本文将展示三维空间Delaunay三角剖分算法在实际问题中的应用价值和效果。
本文还将对三维空间Delaunay三角剖分算法的未来发展方向进行展望,探讨其在新技术和新领域中的应用前景和挑战。
本文旨在全面系统地研究三维空间Delaunay三角剖分算法的理论和实践,为其在实际问题中的应用提供有力的支持和指导。
二、三维空间Delaunay三角剖分算法的基本原理Delaunay三角剖分算法是一种广泛应用于二维空间的数据处理算法,它的核心目标是将一组离散的二维点集剖分为一系列互不重叠的三角形,且这些三角形满足Delaunay性质。
简单来说,Delaunay 性质要求任何一个三角形的外接圆内部不包含该三角形之外的任何数据点。
初始化:为每个点分配一个初始的三角形。
这通常是通过连接每个点与它的两个最近邻点来完成的,形成一个初始的三角形网格。
合并三角形:接下来,算法会尝试合并相邻的三角形,以形成更大的三角形。
在合并过程中,算法会检查新形成的三角形是否满足Delaunay性质。
如果满足,则合并成功;如果不满足,则放弃合并,并标记这两个三角形为“已处理”。
一、概述Delaunay 三角剖分算法是计算机图形学领域中常用的一种算法,它可以将给定的点集进行高效的三角剖分,用于构建网格、进行地理信息系统分析、建立三维模型等应用。
本文将对该算法的原理、实现和应用进行介绍。
二、算法原理1. 待剖分点集在进行Delaunay三角剖分之前,需要准备一个点集,这个点集是待剖分的对象。
点集的数量取决于具体的应用,可以是二维平面上的点,也可以是三维空间中的点。
2. Delaunay 三角形在进行三角剖分时,Delaunay 三角形是一种特殊的三角形,满足以下性质:a. 任意一个点要么位于Delaunay 三角形的外接圆内部,要么位于外接圆的边上;b. 任意两个Delaunay 三角形之间的外接圆不相交。
3. Delaunay 三角剖分Delaunay 三角剖分是将给定点集进行三角剖分的过程,它的目标是构建满足Delaunay 三角形性质的三角形集合。
三、算法实现1. 基于增量法的实现增量法是Delaunay 三角剖分的一种经典算法,它的基本思想是逐步增加点,并根据Delaunay 三角形的性质进行调整。
具体步骤如下: a. 初始化:选择一个超级三角形包含所有点集,作为初始三角剖分;b. 顺序插入点:逐个将待剖分点插入到当前三角剖分中,并进行调整;c. 边界检测:检测新增的边界是否需要进行修正;d. 优化处理:对新增点周围的三角形进行优化调整。
2. 时间复杂度分析增量法的时间复杂度主要取决于点集的数量和点的分布情况,一般情况下,其时间复杂度可以达到O(nlogn)。
四、算法应用1. 图形渲染在计算机图形学中,Delaunay三角剖分常用于构建网格、进行三维渲染等。
它可以有效地分割空间,使得渲染效果更加真实。
2. 地理信息系统地理信息系统中常常需要对地理数据进行空间分析,Delaunay三角剖分可以帮助构建地理网格,进行地形分析、资源评估等。
3. 三维建模在三维建模领域,Delaunay三角剖分可以用于构建复杂的三维模型,并支持模型的分析、编辑等功能。
2018年4月图 学 学 报 April2018第39卷第2期JOURNAL OF GRAPHICS V ol.39No.2结合Delaunay三角面分离法与搜索球策略的三维曲面重建算法袁清洌1,吴学群2(1. 攀枝花学院土木与建筑工程学院,四川攀枝花 617000;2. 昆明理工大学国土资源工程学院,云南昆明 650093)摘要:基于曲面重建在计算机图形学、三维GIS、逆向工程等领域有重要应用,结合区域生长法与Delaunay三角剖分的优势,提出了一种新的散乱点云曲面重建算法。
首先根据曲面中轴性质提出了分离角定义并推导了相关结论,利用局部Delaunay三角形分离角性质抽取大量位于模型表面三角形,从而构建种子三角网增加初始区域的生长面积其次运用自适应搜索球法加快邻域三角形搜索并识别曲面边界。
对比传统的基于Delaunay法和传统区域生长法,该方法只需要一次三角剖分,无需极点与法向量计算,重建速度快,具有Delaunay三角网格的优良结构特性,孔洞数量少,重建出的三维模型几何信息与拓扑关系准确。
实验表明,结合Delaunay 三角剖分与区域生长法重构有向的流形三角网格模型,能够提高三维模型的重建效果与速度,有效地自动识别曲面边界。
关键词:表面重建;点云;Delaunay;分离角;区域生长中图分类号:TP 242.2 DOI:10.11996/JG.j.2095-302X.2018020278文献标识码:A 文章编号:2095-302X(2018)02-0278-093D Surfaces Reconstruction Algorithm Via Detaching DelaunayTriangular Mesh and Search-Ball ApproachYUAN Qinglie1, WU Xuequn2(1. School of Civil and Architectural Engineering, Panzhihua University, Panzhihua Sichuan 617000, China;2. School of Land and Resources Engineering, Kunming University of Science and Technology, Kunming Yunnan 650093, China)Abstract: 3D surface reconstruction are becoming increasing important in geometric modeling and related applications such as in computer graphics, 3D GIS, reverse engineering. This paper presents an algorithm that holds the advantages of both region- growth approaches and Delaunay based on unorganized point cloud. Separation angle is defined and deduced the related conclusion according to the nature of the surface axis, which is applied to extract triangles from the surface of model and increase the initial growth area of the region. An approach of adaptive search-ball method is presented to speed up searching the neighbourhood-triangles and identify the surface boundary. Compared with the traditional Delaunay-based approach, this algorithm requires only one-pass Delaunay computation and reconstruct surfaces rapidly without calculation of pole and the vector. Compared with the traditional region growing method, this algorithm inherits the structural characteristics of the Delaunay triangulation with fewer holes and accurate the 3D geometry information and topology. Experimental results shows that it is highly基金项目:国家自然科学基金项目(41161071)第一作者:袁清洌(1991–),男,山东临沂人,讲师,硕士。
一种快速实现地形图三维实体建模方法王大志【摘要】基于AutoCAD平台的地形图三维实体建模对现阶段土石方工程精确算量、三维可视化设计非常重要.一般建模过程为利用二维多段线或者三维多段线建立地形图三维网面,然后拉伸成三维实体,在此过程中,易产生20%~25%退化的不支持拉伸的对象,这些对象需重新手动建立三角网面域,然后才能拉伸成实体,严重影响建模速度.采用ObjectARX二次开发技术,直接通过坐标变换,利用等高线数据,调用"boundary"函数来生成不规则三角网面域,然后建立扫掠、放样建模接口函数,沿Z 轴对三角网面域进行拉伸形成立体,快速实现了地形图三维实体建模.%Based on the topographic map of 3D modeling of AutoCAD platform, the accurate calculation of 3D visualization design is very important in earthwork engineering at the present stage. The general process of modeling 3D topographic map of a net surface is that a three-dimensional entity is stretched into by using of 2D polyline or 3D polyline. In this process, there are 20%–25% degradation of tensile objects, and it is needed to manually build triangle region, then these objects extruded. This is serious impact on modeling speed. The "boundary" function is called to generate a triangular irregular network area and then a sweep and lofting the interface function along theZ axis of the triangular mesh surface domain stretching formation of the three-dimensional object using coordinate transformation and contour data based on ObjectARX development technology. The fast terrain modeling is realized.【期刊名称】《图学学报》【年(卷),期】2017(038)001【总页数】5页(P23-27)【关键词】AutoCAD;ObjectARX;boundary;实体建模【作者】王大志【作者单位】中电投云南国际电力投资有限公司,云南昆明 650228【正文语种】中文【中图分类】TP391.9地形图的三维建模一直是计算机图形学领域的研究热点。
带地质逆断层约束数据域的delaunay三角剖分算法研究随着地质勘探技术的不断发展,地质逆断层成为了研究地质结构和地震活动的重要对象之一。
而在地质逆断层的研究中,Delaunay 三角剖分算法是一种常用的数据处理工具。
本文将以《带地质逆断层约束数据域的Delaunay三角剖分算法研究》为题,探讨带有地质逆断层约束的Delaunay三角剖分算法的研究进展。
一、Delaunay三角剖分算法的基本原理Delaunay三角剖分算法是一种计算几何学中常用的三角剖分方法,其基本原理是将一个点集按照一定的规则连接成三角形的网格结构。
在Delaunay三角剖分中,任何一个三角形的外接圆不包含任何其他点,同时,所有点的外接圆都是Delaunay三角剖分的三角形的外接圆。
Delaunay三角剖分算法的基本流程如下:1、将点集中的所有点进行排序,按照x坐标从小到大的顺序进行排序;2、从第一个点开始,依次将每个点插入到已有的三角形中,使得插入后的三角形仍然满足Delaunay条件;3、当所有点都插入完成后,将所有相邻的三角形连接起来,形成一个Delaunay三角剖分。
二、带有地质逆断层约束的Delaunay三角剖分算法在地质勘探中,地质逆断层是一种特殊的地质构造,具有明显的断层面和断层带。
在进行地质逆断层的研究和勘探时,需要将地质逆断层的特殊性质考虑进去,以保证勘探结果的准确性和可靠性。
针对地质逆断层的特殊性质,研究者们提出了一种带有地质逆断层约束的Delaunay三角剖分算法。
该算法在进行三角剖分时,考虑了地质逆断层的位置和特性,将地质逆断层作为约束条件进行处理,从而得到更加准确的三角剖分结果。
带有地质逆断层约束的Delaunay三角剖分算法的基本流程如下: 1、将点集中的所有点进行排序,按照x坐标从小到大的顺序进行排序;2、从第一个点开始,依次将每个点插入到已有的三角形中,使得插入后的三角形仍然满足Delaunay条件;3、当插入点与地质逆断层相交时,将插入点拆分成两个点,并分别插入到地质逆断层两侧的三角形中;4、当所有点都插入完成后,将所有相邻的三角形连接起来,形成一个Delaunay三角剖分。
基于delaunay三角剖分的三维地形生成1、问题背景地图是几个世纪以来最重要的空间信息表达的载体“近年来随着高技术的发展特别是基于计算机平台GIS的发展,地理信息系统得到日益广泛的应用。
地形与人类的生产生活息息相关,在城市规划、路径选取、资源调查与分配、工程勘查与设计、项目选址、环境监测、灾害预测与预报、军事、游戏娱乐等领域有广泛的应用,因此人们一直关心如何真实地表达自然界的地形,以满足人们生活的需要。
目前,随着计算机技术的进一步发展,计算能力的不断提高,使用计算机进行地的三维表达成为目前研究的热点,这种地形的表达方式,不但感觉直观、真实性好、而且具有二维电子地图的其它优点,例如分层显示!位置顶点查找等。
二维地形生成技术是当今社会的热门技术,正在被越来越多的人所重视和研究。
2、算法描述Lawson提出了用逐点插入法建立D-三角网的算法思想[11]。
Lee和Schachter,Bowyer,Watson,Sloan,Macedonio和Pareschi,Floriani和Puppo,Tsai先后进行了发展和完善。
本次实验算法为delaunay三角剖分的逐点插入法,算法步骤如下:1、创建一个最大的三角形包含所有离散的数据点,构成初始的三角网。
2、遍历各点(p)(1)、在三角网查找包含p的三角形t。
(2)、若p在三角形内:p与三角形t的三个顶点相连构成三个三角形。
加入三角网中。
如下图:若p 在三角形边上:找出边所对应的另一个三角形的顶点,并与当前的三角形的顶点构成四个顶点,加入三角形网中。
如下图:(3)、移除三角形t 。
(4)、用LOP 算法对各个三角形进行优化处理。
3、移除外围三角形。
LOP 算法在相邻的两个三角形( abd 和bcd) 所组成的四边形中,如果对角线交换所得的两个新三角形ABC 和ABD( 如下图) 比原来的两个三角形更优,则用新的两个三角形替代原来的两个三角形。
更优的标准之一是最小角度最大原则: 调整前的二个三角形共六个内角中的最小角和调整后的六个角中的最小角相比较,若前者小于后者则调整,否则不调整; 标准之二是空外接圆性质: 在由点集V 所形成。
基于delaunay三角剖分的三维地形生成
1、问题背景
地图是几个世纪以来最重要的空间信息表达的载体“近年来随着高技术
的发展特别是基于计算机平台GIS的发展,地理信息系统得到日益广泛的应用。
地形与人类的生产生活息息相关,在城市规划、路径选取、资源调查与分配、工程勘查与设计、项目选址、环境监测、灾害预测与预报、军事、游戏娱乐等领域有广泛的应用,因此人们一直关心如何真实地表达自然界的地形,以满足人们生活的需要。
目前,随着计算机技术的进一步发展,计算能力的不断提高,使用计算机进行地的三维表达成为目前研究的热点,这种地形的表达方式,不但感觉直观、真实性好、而且具有二维电子地图的其它优点,例如分层显示!位置顶点查找等。
二维地形生成技术是当今社会的热门技术,正在被越来越多的人所重视和研究。
2、算法描述
Lawson提出了用逐点插入法建立D-三角网的算法思想[11]。
Lee和Schachter,Bowyer,Watson,Sloan,Macedonio和Pareschi,Floriani和Puppo,Tsai先后进行了发展和完善。
本次实验算法为delaunay三角剖分的逐点插入法,算法步骤如下:
1、创建一个最大的三角形包含所有离散的数据点,构成初始的三角网。
2、遍历各点(p)
(1)、在三角网查找包含p的三角形t。
(2)、若p在三角形内:p与三角形t的三个顶点相连构成三个三角形。
加
入三角网中。
如下图:
若p 在三角形边上:找出边所对应的另一个三角形的顶点,并与当前的三角形的顶点构成四个顶点,加入三角形网中。
如下图:
(3)、移除三角形t 。
(4)、用LOP 算法对各个三角形进行优化处理。
3、移除外围三角形。
LOP 算法
在相邻的两个三角形( abd 和bcd) 所组成的四边形中,如果对角线交换所得的两个新三角形ABC 和ABD( 如下图) 比原来的两个三角形更优,则用新的两个三角形替代原来的两个三角形。
更优的标准之一是最小角度最大原则: 调整前的二个三角形共六个内角中的最小角和调整后的六个角中的最小角相比较,若前者小于后者则调整,否则不调整; 标准之二是空外接圆性质: 在由点集V 所形成。
D-三角网中,其每个三角形的外接圆均不包含点集V 中的其他任意点。
结合本文定义的数据结构,本文采取了以相邻三角形作为优化着眼点的处理算法。
根据Delaunay 三角网空外接圆性质有以下判断: 当sin( ∠C + ∠D) ≤0,
不进行优化,p
否则进行优化。
如果直接计算出sin( ∠C + ∠D) 则过于复杂,本文只关心它的符号,不关心它的数值,可以简化为
sin( ∠C +∠D) ≈[( x1 -x3) ( y2 -y3) -( x2 -x3)( y1 -y3) ]×
[( x2 -x4) ( x1 -x4) +( y2 -y4) ( y1 -y4) ]+
[( x2 -x4) ( y1 -y4) -( x1 -x4) ( y2 -y4) ]×
[( x1 -x3) ( x2 -x3) +( y1 -y3) ( y2 -y3) ]
3、实现方法
实验环境:MFC+OSG
数据结构:
///////////边结构体///////////////
//////////三角形结构体///////////////
//////////三角网结构体///////////////
数据获取:
数据来源一:随机生成的三维离散点,x,y、z坐标都由随机的浮点数构成。
离散点的个数为1000;
数据来源二:在google earth 地图中抓取的高程点。
数据量为4000;
实验结果展示:
结果一:离散的数据
结果二:google earth 抓取的高程信息
总结
delaunay-三角网由于其独特的数学性质,是进行2.5维分析的一个有力工具,是GIS中DTM模型的一个重要表示方法和分析处理手段。
在已有的由离散数据建立D-三角网的算法中,经过二十多年来的研究与实践,分治算法与逐点插
入法被普遍接受和采用。
这两类算法虽然各自具有明显的优势,但也同时具有其固有的缺点。
分治算法具有时间优势,但却付出了高昂的空间代价。
逐点插入法具有空间优势,但时间效率极低。
参考文献
[1] Mark de Berg, Marc van Kreveld, Mark Overmars, Otfried Schwarzkopf, 邓俊辉(译). 计算几何——算法与应用.
[2]Thiessen A H. Precipitation Averages for Large Areas, Monthly Weather Review, 1911(39):1082~1084
[3]Delaunay B. Sur la Sphere Vide. Bulletin of the Academy of Sciences of the USSR, Classe des Sciences Mathematiques et Naturelles,
1934(8):793~800
[4]毋河海. 地图数据库系统. 北京:测绘出版社,1991
[5]柯正谊,何建邦,池天河.数字地面模型.北京:中国科学技术出版社,1993。