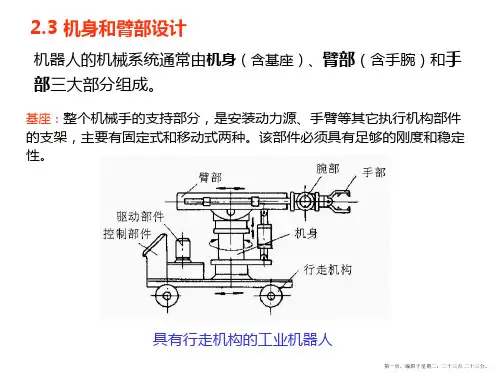
机器人机身及行走机构设计
- 格式:ppt
- 大小:1.47 MB
- 文档页数:4
双足仿生机器人行走机构设计
双足仿生机器人行走机构设计一般包括以下几个关键部分:
1. 足底结构:足底结构是机器人与地面接触的部分,需要具备良好的稳定性和抓地力。
一般采用橡胶材料制作,设计有凹凸纹路或者类似动物脚掌的结构,以增加摩擦力和抓地力。
2. 关节设计:双足仿生机器人的每个腿部都需要多个关节来实现自由运动。
关节设计需要考虑到机器人的稳定性和灵活性,一般采用电机驱动的旋转关节或者液压/气动驱动的线性关节。
3. 动力系统:机器人行走需要动力系统提供能量。
一般采用电池或者电源供电,驱动关节的电机需要具备足够的扭矩和速度来实现机器人的行走。
4. 传感器:为了实现机器人的平衡和姿态控制,需要配备各种传感器。
例如,陀螺仪和加速度计可以用来检测机器人的倾斜角度,力传感器可以用来感知地面反作用力,视觉传感器可以用来感知周围环境。
5. 控制系统:双足仿生机器人的行走需要一个高效的控制系统。
控制系统可以根据传感器的反馈信息,实时调整关节的运动,以保持机器人的平衡和稳定。
总体来说,双足仿生机器人行走机构设计需要考虑到稳定性、灵活性、能量效率和控制系统的要求。
具体的设计方案需要根据机器人的应用场景和需求来确定。
管道攀爬机器人结构设计及行走动力特性分析一、结构设计:1.机器人主体结构:管道攀爬机器人的主体结构一般由多个可伸缩的模块组成,每个模块包括一个电机、行走轮和一个伸缩杆。
2.伸缩机构:机器人通过伸缩杆来适应不同管道尺寸。
伸缩杆一般采用多节设计,每个节段之间通过齿轮或链条进行连接,以实现伸缩功能。
3.行走轮和传动机构:机器人采用行走轮来实现在管道内的行走。
行走轮通常由橡胶材料制成,提供良好的摩擦力。
传动机构一般为电机与行走轮的传动装置,通常采用齿轮传动或链条传动。
4.控制系统:机器人的控制系统包括传感器、执行器和控制器。
传感器可以感知机器人的位置、姿态和环境条件等信息,以便进行自主导航和任务执行。
执行器包括电机和伸缩杆等组件,用于控制机器人的运动和伸缩。
控制器负责接收传感器信息,并根据预设的算法控制机器人的运动。
二、行走动力特性分析:1.爬行速度:管道攀爬机器人的爬行速度取决于行走轮的直径、电机的转速和传动机构的设计等因素。
一般来说,机器人爬行速度应该足够快,以提高任务完成效率。
2.负载能力:机器人承载工具和传感器进行任务执行,因此需要具有较大的负载能力。
负载能力的大小与机器人的结构强度和设计参数有关。
3.自稳定性:机器人在管道内行走时需要具备较好的自稳定性,以应对管道内的复杂环境。
自稳定性主要通过控制系统实现,通过传感器检测机器人的姿态和环境条件,并及时做出调整。
4.能耗与动力供应:管道攀爬机器人通常采用电池供电,因此需要考虑能耗和续航时间。
一般通过优化结构设计和控制算法,减小阻力和能耗,延长电池寿命。
5.适应性:管道攀爬机器人需要适应多种管道的尺寸和形状。
因此,其结构设计应具有一定的自适应性,能够根据管道的不同尺寸进行伸缩和调整。
综上所述,管道攀爬机器人的结构设计和行走动力特性是保证机器人能够在管道内进行任务执行的关键要素。
通过合理的结构设计和动力调节,可以使机器人具有较高的工作效率和可靠性,适应不同尺寸和形状的管道。


双足仿生机器人行走机构设计1. 引言双足仿生机器人是一种模仿人类步行方式的机器人,其行走机构的设计是实现机器人自主行走的关键。
本文将介绍双足仿生机器人行走机构的设计原理、结构与控制方法。
2. 设计原理双足仿生机器人的行走机构设计基于人类步行的原理。
人类步行是一种交替进行的两足动作,每步分为摆动相和支撑相。
在摆动相中,一只脚离地,并向前摆动;在支撑相中,另一只脚着地支撑身体。
机器人的行走机构需要模拟这一过程,通过控制各关节的运动实现机器人的步行。
3. 结构设计双足仿生机器人的行走机构包括传感模块、控制模块和执行模块。
传感模块用于感知机器人身体姿态和环境信息,如倾斜角、步长和地面状态等。
控制模块根据传感器信号和预设的步态参数计算关节的运动轨迹和力矩控制信号。
执行模块根据控制模块的指令,控制各关节运动,实现机器人的步行。
具体的结构设计包括:3.1 关节设计双足仿生机器人的关节设计需要考虑力矩传输、运动范围和结构强度等因素。
一般采用电机驱动的关节设计,通过控制电机的转动角度和力矩,实现机器人的步行动作。
3.2 脚底设计机器人的脚底设计需要考虑地面的摩擦力、稳定性和抗震性等因素。
一般采用具有摩擦力的材料作为脚底,例如橡胶或塑料材料。
同时,在脚底设计中还可以添加传感器,用于感知地面的状态和表面特征。
3.3 稳定性设计双足仿生机器人的稳定性设计是保证机器人能够在不倒地的情况下行走。
稳定性设计包括重心的控制、姿态的调节和动态平衡控制等。
通过控制机器人的关节运动和重心转移,使机器人能够保持平衡并行走。
4. 控制方法双足仿生机器人的行走机构控制方法包括开环控制和闭环控制两种。
4.1 开环控制开环控制是指根据预设的步态参数,通过控制各关节的运动轨迹和力矩,实现机器人的步行。
开环控制简单但稳定性较差,容易受到外界干扰影响。
4.2 闭环控制闭环控制是根据传感器信号和控制模块的反馈信息,实时调整关节的运动轨迹和力矩,以实现更加稳定的步行。
四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
机器人行走机构原理机器人行走机构是指用于控制机器人移动和行走的结构和装置。
它是实现机器人在不同环境中自由移动和执行任务的关键部件。
机器人行走机构的设计和原理直接影响着机器人的稳定性、速度、灵活性和适应性。
1. 基本概念在探讨机器人行走机构的原理之前,先来了解一些基本概念:•步态(Gait):指机器人在运动过程中,支撑腿与摆动腿之间的相对运动规律。
不同步态适用于不同环境和任务需求。
•支撑腿(Support Leg):指在行走过程中用于支撑和稳定身体的腿。
•摆动腿(Swing Leg):指在行走过程中用于推进身体向前移动的腿。
•步态周期(Gait Cycle):指完成一次完整步态所需要的时间。
•步幅(Stride Length):指每一步前进的距离。
2. 行走方式2.1. 轮式行走轮式行走是最常见且简单的行走方式之一。
它使用轮子作为机器人的运动部件,通过控制轮子的转动来实现机器人的行走。
轮式行走机构可以分为两种类型:差速驱动和全向驱动。
2.1.1. 差速驱动差速驱动是指通过控制左右两侧轮子的转速差异来实现机器人的转弯和定位。
当左右两侧轮子转速相等时,机器人直线行走;当两侧轮子转速不等时,机器人会产生转向力矩,从而实现转弯。
差速驱动的优点是结构简单、成本低廉,适用于平坦且无障碍物的环境。
然而,它在不同地面上的摩擦力变化较大时容易出现滑移现象,并且在越野或不平坦地形上表现较差。
2.1.2. 全向驱动全向驱动是指通过控制多个轮子(通常是三个或四个)以不同方向和速度旋转来实现机器人的任意方向移动。
全向驱动可以通过组合直线运动和旋转运动来实现复杂路径的行走。
全向驱动的优点是机器人具有更好的机动性和灵活性,能够在狭窄空间中进行精确移动和定位。
然而,全向驱动的结构复杂、成本较高,并且对地面摩擦力要求较高。
2.2. 腿式行走腿式行走是模仿生物行走方式的一种机器人行走方式。
它使用类似于生物的腿部结构来实现机器人的行走。
行走机构模型设计方案行走机构是机器人最基本的动力传输组件之一,其设计方案需要考虑机械结构、动力传输和控制系统等因素。
下面是一个行走机构模型的设计方案,包括机构结构、动力传输和控制系统。
机构结构:行走机构的机构结构可以采用六足机器人的设计,六足机器人由六个腿组成,每个腿包括几个连杆和关节。
连杆由附着在关节上的电机驱动,通过关节的运动实现腿部的伸缩和转动。
整个机构结构应该具备足够的承重能力和稳定性。
动力传输:行走机构的动力传输可以采用电机驱动的方式,每个腿部都需要一个电机来驱动其运动。
这些电机应该具备足够的扭矩和转速,以便使机器人能够行走在不同的地形上。
电机的控制可以采用脉冲宽度调制(PWM)技术,通过改变电机转速和方向来控制腿部的运动。
控制系统:行走机构的控制系统可以采用嵌入式控制器来实现。
嵌入式控制器可以通过传感器获取机器人的姿态信息和环境信息,然后根据这些信息来控制电机的运动。
控制系统应该具备实时性和稳定性,能够快速响应环境变化和机器人姿态的变化。
此外,还可以加入自动避障算法,使机器人能够自动避开障碍物。
自动避障算法可以通过激光或超声波传感器来检测周围的障碍物,并根据检测结果来调整机器人的行走路径。
避障算法应该能够高效地计算机器人的最佳行走路径,并能够避开复杂的障碍物。
同时,为了提高机器人的行走效率和稳定性,可以在行走机构中加入一些附加装置,如惯性传感器和阻尼器。
惯性传感器可以感知机器人的姿态和运动状态,并根据需要来调整机器人的行走步态。
阻尼器可以增加机器人的稳定性,减小机器人的震动和抖动。
综上所述,一个完整的行走机构模型设计方案应该考虑机构结构、动力传输和控制系统等因素。
这些设计方案可以根据实际需求进行调整和优化,以提高机器人的行走效率和稳定性。
四摆臂履带式搜索机器人行走机构设计
四摆臂履带式搜索机器人行走机构是一种新型的机器人行走系统,其行走机构主要由四摆臂和履带组成。
具体的设计方案如下:
1. 四摆臂设计
四摆臂作为机器人的行走支撑系统,需要具备较好的稳定性和抗震性。
设计方案中,四摆臂的杆件采用铝合金材料,具有良好的强度和刚度,并且重量较轻。
通过对杆件的优化设计,使得四摆臂的重心与机器人的中心保持一致,可以使得机器人在行走过程中具备更好的稳定性。
2. 履带设计
履带是机器人行走的关键部件之一,需要能够适应各种地形,同时具备较好的抗磨损性和承载能力。
设计方案中,采用橡胶履带作为机器人的行走轮胎,其具有良好的耐磨性和抗滑性能。
同时,增加了履带的支撑点,可以增加其承载能力,使得机器人可以在不同的地形上顺利行走。
3. 驱动系统设计
机器人的驱动系统主要由直流电机、减速器、液压缸等组成。
设计方案中,驱动系统可以实现对机器人履带的前进和后退控制,从而保证机器人在行走过程中的稳定性和控制性。
综上所述,四摆臂履带式搜索机器人行走机构设计方案,通过对四摆臂和履带的优化设计,保证了机器人的稳定性和控制性,同时可以适应各种地形的行走。
双足仿生机器人行走机构设计双足仿生机器人行走机构的设计需要综合考虑机械结构、控制系统和传感器等多个方面。
下面是一个较为常见的双足仿生机器人行走机构设计的概述:1. 机械结构:双足仿生机器人的机械结构通常由两个对称的机械腿组成,每个机械腿由多个关节连接而成。
关节可以采用电机驱动,例如直线电机或旋转电机。
关节的设计需要考虑到机器人的运动范围、力矩需求以及稳定性等因素。
2. 步态规划:双足仿生机器人的步态规划是指确定机器人腿部关节的运动轨迹和步伐。
一种常见的步态是通过将机器人的步伐分为支撑相和摆动相来实现。
在支撑相,机器人的一只腿着地支撑身体重量;在摆动相,机器人的另一只腿离地向前摆动。
步态规划需要考虑到机器人的稳定性、能耗和速度等因素。
3. 动力学模型:为了实现双足仿生机器人的稳定行走,需要建立机器人的动力学模型。
动力学模型可以通过运动学和力学方程来描述机器人的运动和受力情况。
这些模型可以用于控制系统设计和运动规划。
4. 控制系统:双足仿生机器人的控制系统需要实时监测机器人的姿态、关节角度和力矩等信息,并根据预定的步态规划来控制机器人的运动。
控制系统通常包括传感器、控制算法和执行器。
传感器可以包括惯性测量单元(IMU)、压力传感器和视觉传感器等,用于获取机器人的状态信息。
控制算法可以根据传感器数据实时计算出控制指令,例如关节角度和力矩。
执行器则将控制指令转化为机械运动。
5. 传感器:双足仿生机器人的传感器可以用于感知环境和监测机器人状态。
例如,视觉传感器可以用于识别障碍物和地面形状,压力传感器可以用于检测脚底的接触力,IMU可以用于测量机器人的加速度和角速度等。
这些传感器可以提供给控制系统有关机器人周围环境和自身状态的信息,以便实现更精确的控制和导航。
以上是双足仿生机器人行走机构设计的一般概述,具体的设计还需要根据具体应用需求和机器人的尺寸、负载和预期性能等因素进行进一步详细设计和优化。