工业机器人静力计算及动力学分析
- 格式:ppt
- 大小:1.94 MB
- 文档页数:4

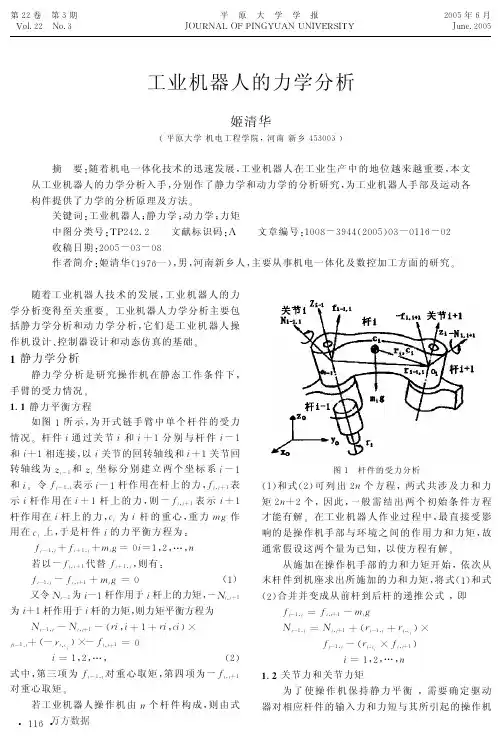
第!!卷!第"期#$%&!!!’$&"!!!!!平!原!大!学!学!报()*+’,-)./0’12*,’*’0#3+4052!!!!!667年8月!(9:;&!667工业机器人的力学分析姬清华!平原大学机电工程学院"河南新乡<7"66"#!!摘!要!随着机电一体化技术的迅速发展!工业机器人在工业生产中的地位越来越重要!本文从工业机器人的力学分析入手!分别作了静力学和动力学的分析研究!为工业机器人手部及运动各构件提供了力学的分析原理及方法"关键词!工业机器人#静力学#动力学#力矩中图分类号!5/!<!W !!!文献标识码!,!!文章编号!=66>?"@<<!!667#6"?6==8?6!!!收稿日期!!667?6"?6>作者简介!姬清华$=@A 8%&!男!河南新乡人!主要从事机电一体化及数控加工方面的研究"!!随着工业机器人技术的发展"工业机器人的力学分析变得至关重要$工业机器人力学分析主要包括静力学分析和动力学分析"它们是工业机器人操作机设计%控制器设计和动态仿真的基础$P 静力学分析静力学分析是研究操作机在静态工作条件下"手臂的受力情况$P &P 静力平衡方程如图=所示"为开式链手臂中单个杆件的受力情况$杆件)通过关节)和)N =分别与杆件)U =和)N =相连接"以)关节的回转轴线和)N =关节回转轴线为2)U =和2)坐标分别建立两个坐标系)U =和)$令5)U =")表示)U =杆作用在杆上的力"5)")N =表示)杆作用在)N =杆上的力"则U 5)")N =表示)N =杆作用在)杆上的力"*)为)杆的重心"重力<1作用在*)上"于是杆件)的力平衡方程为&5)U =")N 5)N =")N <)1K 6)K ="!"’"#若以5)")N =代替5)N =")"则有&5)U =")U 5)")N=N <)1K 6!=#!!又令;)U =为)U =杆作用于)杆上的力矩"U ;)")N =为)N =杆作用于)杆的力矩"则力矩平衡方程为;)U =")U ;)")N=U !&)")N =N &)"*)#V 5)U =")N !U &)"*)#V U 5)")N =K 6!!)K ="!"’"!!#式中"第三项为5)U =")对重心取矩"第四项为U 5)")N =对重心取矩$若工业机器人操作机由#个杆件构成"则由式图=!杆件的受力分析!=#和式!!#可列出!#个方程"两式共涉及力和力矩!#g !个"因此"一般需结出两个初始条件方程才能有解$在工业机器人作业过程中"最直接受影响的是操作机手部与环境之间的作用力和力矩"故通常假设这两个量为已知"以使方程有解$从施加在操作机手部的力和力矩开始"依次从末杆件到机座求出所施加的力和力矩"将式!=#和式!!#合并并变成从前杆到后杆的递推公式"即5)U =")K 5)")N=U <)1;)U =")K ;)")N =N !&)U =")N &)"*)#V 5)U =")U !&)"*)V 5)")N =#!!)K ="!"’"#P &N 关节力和关节力矩为了使操作机保持静力平衡"需要确定驱动器对相应杆件的输入力和力短与其所引起的操作机(8==( 万方数据手部力和力矩之间的关系!令*)为驱动元件)的第)个驱动器的驱动力或驱动力矩"并假设关节处无摩擦"则有当关节是移动副时"如图!所示"*)应与该关节的作用力5)U =")在2)U =上的分量平衡"即*)K -O)U =5)U=")式中-)U =为)U =关节轴的单位向量!上式表明驱动器的输入力只与5)U =")在2)U =轴上的分量平衡"其他方向的分量由约束力平衡"约束力不作功!当关节是转动副时"*)表示驱动力距"它与作用力矩;)U =")在2)U =轴上的分量相平衡"即*)K -O)U =;)U=")图!!移动关节上的关节力N 动力学分析动力学分析是研究操作机各主动关节驱动力与手臂运动的关系"从而得出工业机器人动力学方程!目前已提出了多种动力学分析方法"这里仅就用牛顿欧拉方程建立工业机器人动力学方程作简要介绍!图"!杆件动力学方程的建立!!动力学方程可以用两个方程表达#一个用以描述质心的移动"另一个描述质心的转动!前者称为牛顿运动方程"后者称为欧拉运动方程!取工业机器人手臂的单个杆件作为自由体"其受力分析如图"所示!图中(*)为杆件)相对于固定坐标系的质心速度"+)为杆件)的转动角速度!因为固定坐标系是惯性参考系"所以将杆件)的惯性力加入到静力学方程式$=%中"于是有牛顿运动方程#5)U =")U 5)")N=N <)1U <)W (*)K 6)K ="!"&"#$"%作用在杆件)上的惯性矩是该杆件的瞬时角动量对时间的变化率!令+)为角速度向量"B )为杆件)质心处的惯量"于是角动量为B )+)!因为惯量随杆件方位的变化而变化"所以角动量对时间的导数不仅包含B )W +)"而且包含因B )的变化而引起的变化+)V B )+)"即陀螺力矩"上述两项加到静力学力矩平衡式$!%中"得;)U =")U ;)")N =N &)"*)V 5)")N =U &)U ="*)V 5)U =")U B W +)U +)V B )+)K 6)K ="!"&"#$<%公式$"%和$<%是单个杆件的动力学特性关系式"若将工业机器人的:个杆件均列出相应的上述两个方程"即得到工业机器人完整的动力学方程组的基本形式#牛顿’欧拉方程!!!参考文献!!="徐元昌#陶学恒&工业机器人!["&北京$中国轻工业出版社#=@@@&!!"陈小川#刘晓冰&虚拟制造体系及其关键技术!("&计算机辅助设计与制造#=@@@#%=6&&!""盛晓敏#邓朝晖&先进制造技术!["&北京$机械工业出版社#!66<&!<"邱士安&机电一体化技术!["&西安$西安电子科技出版社#!66<&【责任编校!李东风】@"@"’-.()(45B %*$’")*(!"U 474#_K +)"2?$,’$C "*0$#)*$+$#DX +"*8&)*$+X #1)""&)#1H "I $&8<"#8’5%)#1.3$#6#)("&7)8."9)#:)$#1"!"#$#<7"66"40)#$%@7(#1’*##_C G BG B ;F E J C II ;T ;%$J M ;:G$O [;H B E G F E :C H D "G B ;F $K $GE J J %C ;IC :C :I 9D G F L BE T ;K ;H $M ;M $F ;E :IM $F ;C M J $FG E :G &5B C D E F G CH %;E :E %L c ;D O F $M M ;H B E :C H D "I C D H 9D D ;D O F $MG B ;D G E G C H D E :II L :E M C H D D ;J E F E G ;%L E :I$O O ;F D G B ;G B ;$F C ;D $O E :E %L c C :Q E F M M $T ;M ;:G E :I H $M J$:;:G $O F $K $G D &A %.:41/(#F $K $G (D G E G C H D (I L :E M C H D (M $T ;M ;:G )A ==) 万方数据工业机器人的力学分析作者:姬清华, JI Qing-hua作者单位:平原大学,机电工程学院,河南,新乡,453003刊名:平原大学学报英文刊名:JOURNAL OF PINGYUAN UNIVERSITY年,卷(期):2005,22(3)被引用次数:2次1.邱士安机电一体化技术 20042.盛晓敏;邓朝晖先进制造技术 20043.陈小川;刘晓冰虚拟制造体系及其关键技术 1999(10)4.徐元昌;陶学恒工业机器人 19991.陈登瑞六自由度机械手本体结构关键技术研究[学位论文]硕士 20062.张烈霞工业机器人运动及仿真研究[学位论文]硕士 2006本文链接:/Periodical_pydxxb200503036.aspx。