第五章线性系统的根轨迹法5.1根轨迹的基本概念5.2根轨迹
- 格式:ppt
- 大小:2.48 MB
- 文档页数:53

线性系统的根轨迹法实验报告实验二线性系统的根轨迹法一,实验目的1,掌握matlab绘制根轨迹的方法。
2,观察k值变化对系统稳定性的影响。
3,掌握系统临界稳定情况下k值得求取。
4,了解增设零点对系统稳定的影响以及改善系统稳定性的方法。
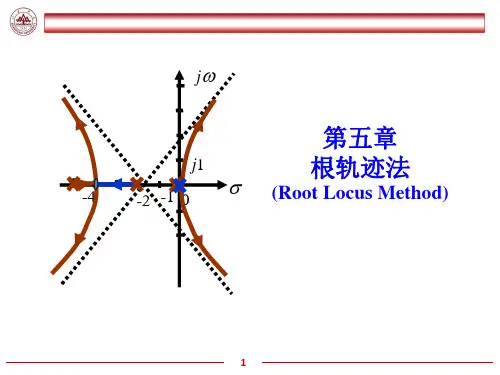
二,实验原理根轨迹的概念:所谓根轨迹就是当开环系统某一参数从零变到无穷大时,闭环系统特征方程式的根在s平面上变化的轨迹。
根轨迹与系统性能:有了根轨迹就可以分析系统的各种性能了,稳定性的判定,当开环增益从零变到无穷大时,根轨迹不会越过虚轴进入s平面的右半平面,此时K的范围为系统稳定的范围,根轨迹与虚轴的交点处的K值,为系统的临界开环增益,开根轨迹进入s平面的右半平面时所对应的K值为系统不稳定的情况。
三,实验内容A、设单位负反馈系统的开环传递函数为G(s)=K/(s*(s+1)(s+5)) (1) 绘制系统的根轨迹,并将手工绘制结果与实验绘制结果比较; (2) 从实验结果上观察系统稳定的K 值范围;(3) 用simulink 环境观察系统临界稳定时的单位阶跃响应分析:绘制根轨迹的matlab文本为clfnum=1;den=conv([1 1 0],[1 5]); rlocus(num,den) %绘制系统根轨迹1,得到如图的根轨迹图:2,用鼠标点击根轨迹与虚轴处的交点可得到临界稳定的开环增益K=30,所以系统稳定的K值范围为0―30。
3,在simulink环境下按下图连接电路:取增益为30的时候在示波器下观察单位节约响应,输出波形为:由图可以看出单位阶跃响应的输出为等幅的震荡输出,所以此时系统为临界稳定状态。
当改变开环增益为50和20时观察示波器,得到输出波形分别为:由图可知当增益K为50时输出为不稳定的震荡输出,此时系统不稳定,当增益K为20时输出的波形震荡越来越缓慢,最后趋于稳定,所以此时的系统是稳定的。
B,设单位反馈控制系统的开环传递函数为G(S)=K(s+3)/s(s+1)(s+2)(1) 仿照上题绘制系统的根轨迹,并判断系统的稳定性; 参照第一题得到matlab命令文本为:clfnum=1;den=conv([1 1 0],[1 2]); rlocus(num,den) %绘制系统根轨迹得到如图的根轨迹图:1,由图可知根轨迹没有进入s平面右半平面,所以系统在K=0到K=?都是稳定的。

自动控制原理根轨迹分析知识点总结自动控制原理是研究自动控制系统的基本理论和方法的学科,而根轨迹分析是自动控制原理中的一项重要内容。
本文将对根轨迹分析的知识点进行总结,帮助读者更好地理解和运用这一分析方法。
一、根轨迹分析的基本概念根轨迹是描述控制系统传递函数的极点随参数变化而在复平面上运动的轨迹。
通过绘制根轨迹图,可以直观地了解系统的稳定性、动态响应和频率特性等重要信息。
二、根轨迹的性质1. 根轨迹图是在复平面上绘制的闭合曲线,其中包含了系统的所有极点。
2. 根轨迹出发点(即开环传递函数极点)的数量等于根轨迹终止点(即闭环传递函数极点)的数量。
3. 根轨迹关于实轴对称,即系统的实部极点只存在于实轴的左半平面或右半平面上。
4. 根轨迹通过传递函数零点的个数和位置来确定。
三、根轨迹的画法1. 确定系统的开环传递函数。
2. 根据传递函数的表达式,求得系统的特征方程。
3. 计算特征方程的根,即极点的位置。
4. 绘制根轨迹图,显示系统极点随参数变化的轨迹。
四、根轨迹的稳定性分析1. 若根轨迹通过左半平面(实部为负)的点的个数为奇数,则系统是不稳定的。
2. 若根轨迹通过左半平面的点的个数为偶数,则系统是稳定的。
五、根轨迹的频率特性分析1. 根轨迹的形状和分布可以判断系统的阻尼比、振荡频率和衰减时间等性能指标。
2. 根轨迹与系统的频率响应曲线之间存在一一对应的关系。
六、根轨迹的应用1. 根据根轨迹可以设计和优化控制系统的参数,使系统具有所需的动态性能。
2. 利用根轨迹可以直观地观察到系统的稳定性和动态响应,便于故障诊断和故障排除。
七、根轨迹分析的注意事项1. 在绘制根轨迹图时,应注意传递函数的极点和零点的位置,以及参数的范围。
2. 在分析根轨迹时,应考虑系统的稳定性、动态响应和频率特性等综合因素。
以上就是自动控制原理根轨迹分析的知识点总结。
根轨迹分析作为自动控制原理中的一项重要内容,对于理解和设计控制系统具有重要意义。
自动控制原理根轨迹规划知识点总结自动控制原理是研究将系统的输入、输出和功能关系用数学模型表示,并利用控制理论方法分析和设计自动控制系统的学科。
而根轨迹规划是自动控制原理中的重要内容,用于描述系统的稳定性和动态性能。
本文将对自动控制原理中的根轨迹规划知识进行总结,包括根轨迹的概念、绘制方法、性质以及应用等方面。
一、根轨迹的概念根轨迹是指在特定范围内改变系统的参数,并以参数为变量绘制出的所有系统传递函数零点或极点的轨迹。
通过观察根轨迹可以直观地了解系统的稳定性和动态性能。
根轨迹通常绘制在复平面内,横坐标表示实部,纵坐标表示虚部。
二、根轨迹的绘制方法1. 绘制根轨迹的步骤a) 通过给定系统的传递函数,确定系统的极点和零点。
b) 根据系统的极点和零点的数量和位置,确定根轨迹的起点和终点。
c) 确定根轨迹在实轴和虚轴上的对称性。
d) 确定根轨迹的趋近线和远离线。
e) 根据根轨迹的特性进行绘制。
2. 根轨迹的特性a) 以实负轴和虚轴上的极点、零点为轴心的圆形称为拐点圆。
b) 根轨迹在实轴上的起点和终点分别由零点和极点所决定。
c) 根轨迹不可交叉,且对称于实轴。
d) 根轨迹的趋近线和远离线的夹角决定了系统的快速响应性能。
三、根轨迹的性质1. 根轨迹的边界a) 根轨迹上的极点和零点均在左半平面时,根轨迹边界为实轴。
b) 根轨迹上存在部分极点或零点位于虚轴上时,根轨迹边界沿离心线和连接极点的径线绘制。
2. 根轨迹与系统稳定性和动态性能的关系a) 系统稳定性:若根轨迹上的极点都在左半平面,则系统是稳定的。
b) 系统动态性能:可通过根轨迹的形状和位置来评估系统的超调量、上升时间、稳态误差等指标。
四、根轨迹的应用根轨迹广泛应用于自动控制系统的分析与设计中。
在系统分析方面,可以通过根轨迹来判断系统的稳定性和动态响应特性。
在系统设计方面,可以根据根轨迹的要求和设计指标进行参数调整和优化,以满足系统的性能需求。
结语:本文对自动控制原理中的根轨迹规划知识进行了总结。