V90伺服111报文插入使用
- 格式:doc
- 大小:673.50 KB
- 文档页数:6

常问问题 04/2019S7-1500(T)对V90 PN进行位置控制的三种方法S7-1500、V90 PN、位置控制/CN/view/zh/109766641C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1概述 ................................................................................................................. 32V90 PN 配置要点.............................................................................................. 43方法一使用西门子报文105和工艺对象........................................................... 64方法二使用西门子报文111和FB284 (SINA_POS)....................................... 125方法三使用西门子报文111和FB38002 (Easy_SINA_Pos) .. (18)C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1概述S7-1500系列PLC 可以通过PROFINET 与V90 PN 伺服驱动器搭配进行位置控制,实现的方法主要有以下三种:·方法一、在PLC 中组态位置轴工艺对象,V90使用西门子报文105,通过MC_Power 、MC_MoveAbsolute 等PLC Open 标准程序块进行控制,这种控制方式属于中央控制方式(位置控制在PLC 中计算)。

【技成周报26期】S7-1500控制V90伺服详解及欧姆龙SPED指令问题汇总本周春节档直播课堂问题来源《S7-1500控制V90伺服实现三种位置控制详解》《欧姆龙脉冲输出SPED指令》技术问题汇总整理。
扫码二维码即可观看录播回放哦《S7-1500控制V90伺服实现三种位置控制详解》课堂资料下载,关注公众号:PLC发烧友,回复:V90问:这个既然不灵活,为啥不用GSD文件方式呀?答:这个根据实际的应用场合来说,一些简单的定位控制可以采用HSP方式实现,位置环直接做在PLC侧,伺服不需要做任何的操作设置,PLC编程比较简单,拖拽几下就基本搞定了。
问:我电脑已经装了博途和其他软件影响吗?答:如果是今天讲课所用到的功能块或者组态文件,那么不影响,这些都是另外添加进去的,需要注意下载时要对应软件版本,然后添加即可。
问:105 111报文各自的优缺点是?答:v90可通过组态HSP和GSD两种方式实现控制,其中HSP 文件用工艺对象组态,位置环直接做在PLC侧,报文改不了,就是105,编程简单拖拽几下就基本搞定了,不需要在伺服测进行任何配置;而GSD文件则比较灵活,既可以在把位置环做在驱动侧,也可做在PLC侧,并且报文的选择也多了;如果位置环做到了驱动侧,我们还要用V-assistance调试软件来设定V90一些参数,控制模式改为EPOS功能。
问:3个轴可以同时调用FB284做绝对定位控制吗?答:可以的,FB284功能块是根据设备视图中报文 111 的硬件标识符来判断对应哪个轴的。
问:多个伺服的情况下,FB284怎么区分控制的伺服?答:S7-1200、1500PLC是通过V90 设备视图中的 111 报文硬件标识符来判断控制的是哪台伺服;S7-300、400PLC是通过设定值符号名或硬件标识符来判断控制的是哪台伺服。
问:回原点模式选择3 的时候,Position管脚的定义原点位置值还起作用吗?答:起作用的,模式选择为3的时候,工艺对象定位轴/同步轴将根据组态执行回原点运动,完成该运动之后,轴被定位在参数“Position”的值指定的位置。
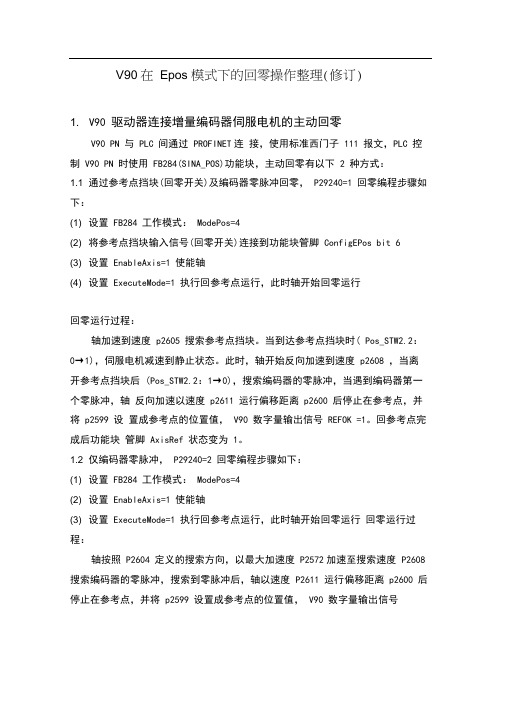
V90在Epos 模式下的回零操作整理(修订)1. V90 驱动器连接增量编码器伺服电机的主动回零V90 PN 与PLC 间通过PROFINET连接,使用标准西门子111 报文,PLC 控制V90 PN 时使用FB284(SINA_POS)功能块,主动回零有以下 2 种方式:1.1 通过参考点挡块(回零开关)及编码器零脉冲回零,P29240=1 回零编程步骤如下:(1) 设置FB284 工作模式:ModePos=4(2) 将参考点挡块输入信号(回零开关)连接到功能块管脚ConfigEPos bit 6(3) 设置EnableAxis=1 使能轴(4) 设置ExecuteMode=1 执行回参考点运行,此时轴开始回零运行回零运行过程:轴加速到速度p2605 搜索参考点挡块。
当到达参考点挡块时( Pos_STW2.2:0→1),伺服电机减速到静止状态。
此时,轴开始反向加速到速度p2608 ,当离开参考点挡块后 (Pos_STW2.2:1→0),搜索编码器的零脉冲,当遇到编码器第一个零脉冲,轴反向加速以速度p2611 运行偏移距离p2600 后停止在参考点,并将p2599 设置成参考点的位置值,V90 数字量输出信号REFOK =1。
回参考点完成后功能块管脚AxisRef 状态变为1。
1.2 仅编码器零脉冲,P29240=2 回零编程步骤如下:(1) 设置FB284 工作模式:ModePos=4(2) 设置EnableAxis=1 使能轴(3) 设置ExecuteMode=1 执行回参考点运行,此时轴开始回零运行回零运行过程:轴按照P2604 定义的搜索方向,以最大加速度P2572加速至搜索速度P2608 搜索编码器的零脉冲,搜索到零脉冲后,轴以速度P2611 运行偏移距离p2600 后停止在参考点,并将p2599 设置成参考点的位置值,V90 数字量输出信号REFOK =1。
回参考点完成后AxisRef 状态变为12. V90 驱动器连接绝对值编码器伺服电机的回零绝对值编码器回零有以下 3 种方式:2.1 通过V-ASSISTANT 软件设置操作步骤:(1) 设置参考点位置坐标值( P2599)(2) 执行设置回参考点( P2507)如图2-1 所示图2-1 通过V-Assist 实现绝对值电机回零(3) 执行保存参数到ROM中2.2 通过BOP面板可通过BOP 功能菜单"ABS" 来设置绝对值编码器的当前位置至零位。

V90伺服111报文插
入及使用
西门子V90伺服111报文
的插入及使用
软件版本:TIA V14 SP1 Professional
1、在硬件目录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW 设为报文标识符280。

V90基本定位器控制(EPOS)常问问题目录1:SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置?2:硬件限位开关怎么接,怎样激活硬件限位功能?3:运行命令给出后轴不运行?4:如何激活软件限位开关?5:excute触发定位动作时90 PN无响应?6:V90 PN 为什么找不到111报文?7:在博途中组态V90 PN时为什么找不到111报文?8:使用STEP7软件,如何实现S7-300/400控制V90PN位置控制?9:怎样设置机械结构、减速比、模态轴,模态范围怎么设置?10:EPOS 可以实现位置同步控制吗?11:FB284如何对ConfigEpos管脚进行配置?12:FB284中HWIDSTW/HWIDZSW怎么填写?13:绝对值编码器如何回零?14:SINA_POS 转速设置及实际值显示?15:绝对值编码器掉电后位置丢失怎么办?16:FB284怎样实现绝对定位控制?17:FB284怎样实现相对定位控制?18:FB284怎样实现连续运行模式控制?19:FB284怎样实现程序块运行控制?20:FB284怎样实现点动"Jog"控制?21:EPOS模式下机械参数如何设置?带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时,参考挡块回零开关接到哪里,怎样配置?回零开关连接到一个PLC的数字量输入点,PLC内编程将其状态关联到FB284功能块ConfigEPos输入引脚的bit6。
(1)将V90参数P29240设置为1(选择参考挡块+零脉冲方式回零);(2)将回零开关连接到一个PLC的数字量输入点;(3)在PLC内编程,将回零开关DI点的状态关联到FB284功能ConfigEPos输入引脚的bit6;(4)FB284功能块选择工作模式ModPos=4;(5)通过输入参数OverV、OverAcc、OverDec指定速度、加减速度的倍率(100%); (6)驱动的运行命令EnableAxis=1;(7)运行条件"CancelTransing" 及"IntermediateStop"必须设置为"1",Jog1 及Jog2 必须设置为"0"。
V90基本定位器控制(EPOS)常问问题目录1:SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置?2:硬件限位开关怎么接,怎样激活硬件限位功能?3:运行命令给出后轴不运行?4:如何激活软件限位开关?5:excute触发定位动作时90 PN无响应?6:V90 PN 为什么找不到111报文?7:在博途中组态V90 PN时为什么找不到111报文?8:使用STEP7软件,如何实现S7-300/400控制V90PN位置控制?9:怎样设置机械结构、减速比、模态轴,模态范围怎么设置?10:EPOS 可以实现位置同步控制吗?11:FB284如何对ConfigEpos管脚进行配置?12:FB284中HWIDSTW/HWIDZSW怎么填写?13:绝对值编码器如何回零?14:SINA_POS 转速设置及实际值显示?15:绝对值编码器掉电后位置丢失怎么办?16:FB284怎样实现绝对定位控制?17:FB284怎样实现相对定位控制?18:FB284怎样实现连续运行模式控制?19:FB284怎样实现程序块运行控制?20:FB284怎样实现点动"Jog"控制?21:EPOS模式下机械参数如何设置?带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时,参考挡块回零开关接到哪里,怎样配置?回零开关连接到一个PLC的数字量输入点,PLC内编程将其状态关联到FB284功能块ConfigEPos输入引脚的bit6。
(1)将V90参数P29240设置为1(选择参考挡块+零脉冲方式回零);(2)将回零开关连接到一个PLC的数字量输入点;(3)在PLC内编程,将回零开关DI点的状态关联到FB284功能ConfigEPos输入引脚的bit6;(4)FB284功能块选择工作模式ModPos=4;(5)通过输入参数OverV、OverAcc、OverDec指定速度、加减速度的倍率(100%); (6)驱动的运行命令EnableAxis=1;(7)运行条件"CancelTransing" 及"IntermediateStop"必须设置为"1",Jog1 及Jog2 必须设置为"0"。
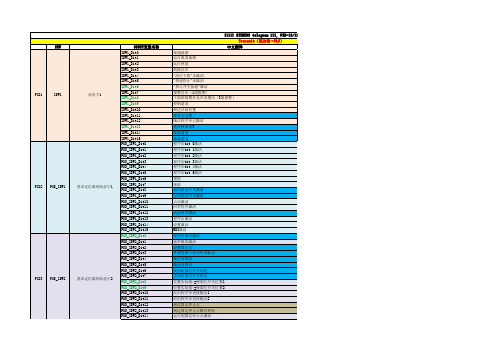
西门子111报文详解Drive01_STW1_BIT11BOOL FALSE Drive01_STW1_BIT12BOOL FALSE Drive01_STW1_BIT13BOOL FALSE Drive01_STW1_BIT14BOOL FALSE Drive01_STW1_BIT15BOOL FALSE Drive01_STW1_BIT0BOOL FALSE Drive01_STW1_BIT1BOOL TRUE Drive01_STW1_BIT2BOOL TRUE Drive01_STW1_BIT3BOOL TRUE Drive01_STW1_BIT4BOOL TRUE Drive01_STW1_BIT5BOOL TRUE Drive01_STW1_BIT6BOOL FALSE Drive01_STW1_BIT7BOOL FALSE Drive01_POS_STW1_BIT8BOOL FALSE Drive01_POS_STW1_BIT9BOOL FALSE Drive01_POS_STW1_BIT10BOOL FALSE Drive01_POS_STW1_BIT11BOOL FALSE Drive01_POS_STW1_BIT12BOOL FALSE Drive01_POS_STW1_BIT13BOOL FALSE Drive01_POS_STW1_BIT14BOOL FALSE Drive01_POS_STW1_BIT15BOOL FALSE Drive01_POS_STW1_BIT0BOOL FALSE Drive01_POS_STW1_BIT1BOOL FALSE Drive01_POS_STW1_BIT2BOOL FALSE Drive01_POS_STW1_BIT3BOOL FALSE Drive01_POS_STW1_BIT4BOOL FALSE Drive01_POS_STW1_BIT5BOOL FALSE Drive01_POS_STW1_BIT6BOOL FALSE Drive01_POS_STW1_BIT7BOOL FALSE Drive01_POS_STW2_BIT8BOOL FALSE Drive01_POS_STW2_BIT9BOOL FALSE Drive01_POS_STW2_BIT10BOOL FALSE Drive01_POS_STW2_BIT11BOOL FALSEDrive01_POS_STW2_BIT12BOOL FALSE Drive01_POS_STW2_BIT13BOOL FALSE Drive01_POS_STW2_BIT14BOOL FALSE Drive01_POS_STW2_BIT15BOOL FALSE Drive01_POS_STW2_BIT0BOOL FALSE Drive01_POS_STW2_BIT1BOOL FALSE Drive01_POS_STW2_BIT2BOOL FALSE Drive01_POS_STW2_BIT3BOOL FALSE Drive01_POS_STW2_BIT4BOOL FALSE Drive01_POS_STW2_BIT5BOOL FALSE Drive01_POS_STW2_BIT6BOOL FALSE Drive01_POS_STW2_BIT7BOOL FALSE Drive01_STW2_BIT8BOOL FALSE Drive01_STW2_BIT9BOOL FALSE Drive01_STW2_BIT10BOOL FALSE Drive01_STW2_BIT11BOOL FALSE Drive01_STW2_BIT12BOOL FALSE Drive01_STW2_BIT13BOOL FALSEDrive01_STW2_BIT1BOOL FALSE Drive01_STW2_BIT2BOOL FALSE Drive01_STW2_BIT3BOOL FALSE Drive01_STW2_BIT4BOOL FALSE Drive01_STW2_BIT5BOOL FALSE Drive01_STW2_BIT6BOOL FALSE Drive01_STW2_BIT7BOOL FALSE Drive01_OVERRIDE WORD W#16#100 Drive01_MDI_TARPOS DWORD DW#16#0 Drive01_MDI_VELOCITY DWORD DW#16#0 Drive01_MDI_ACC WORD W#16#0 Drive01_MDI_DEC WORD W#16#0 Drive01_FREE_W WORD W#16#0 Drive01_ZSW1WORD W#16#0 Drive01_POS_ZSW1WORD W#16#0 Drive01_POS_ZSW2WORD W#16#0 Drive01_ZSW2WORD W#16#0 MELDW WORD W#16#0 Drive01_XIST_A DWORD DW#16#0 Drive01_XIST_B DWORD DW#16#0 Drive01_FAULT_CODE WORD W#16#0 Drive01_WARN_CODE WORD W#16#0 Drive01_FREE_R WORD W#16#0//JOG1 点动命令 p2589=r2090.8//JOG2 点动命令 p2590=r2090.9control via plc; p0854=r2090.10;//启动回零 p2595=r2090.11reserved ;/ external block change P2632=1;P2633=r2090.13//p2613=r2090.14//p2614=r2090.15//启动变频器;p0840=r2090.0OFF2;P0844=r2090.1OFF3; P0848=r2090.2enable operation; p0852=r2090.3//P2641=r2090.4: 0: 停止当前任务,以最大减速度 p2573 停机//P2640=r2090.5: 0: 停止命令,以 P2645 的减速度停车//P2650=r2090.6: 数据输入开关,上升沿进行单步数据传输//激活 traversing block, P acknowledge fault; p2103=r2090.7 //p2648=r2091.8: 1: 绝对位置模式;0:相对位置模式//P2651=r2091.9: 速度模式正向运行//P2652=r2091.10: 速度模式反向运行reserved//p2649=r2091.12: 1: 连续数据传输; 0:单步运行reserved//MDI 模式选择, P2653=r2091.14 0:位置模式 1:速度模式//激活MDI, P2647=r2091.15//选择程序步 bit0: p2625=r2091.0//选择程序步 bit1: p2626=r2091.1//选择程序步 bit2: p2626=r2091.2//选择程序步 bit3: p2626=r2091.3//选择程序步 bit4: p2626=r2091.4//选择程序步 bit5: p2626=r2091.5reservedreserved//回零方式(0:Active homing;1: passive homing); p2597=r2092.8//回零启动时的方向(0:从正向开始回零;1:从反向开始回零);p2604=r2092.9//external block change p2632=0; p2510=r2092.10//external block change p2632=0; p2511=r2092.11reservedreserved//p2582=r2092.14 软限位开关激活//p2568=r2092.15 stop cam 激活//p2655[0]=r2092.0 激活 tracking mode//将当前位置直接设置成零点 p2596=r2092.1//CAM 信号 p2612=r2092.2reservedreserved//点动模式 p2591=r2092.5reservedreservedreservedreservedreserved//电机切换的反馈信号,p0828=r2093.11//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//p2045=r2050[3];profidrive 时钟同步信号//驱动数据组切换 p0820[0]=r2093.0//驱动数据组切换 p0821[0]=r2093.1//驱动数据组切换 p0822[0]=r2093.2//驱动数据组切换 p0823[0]=r2093.3//驱动数据组切换 p0824[0]=r2093.4reservedreserved//parking axis; p0897=r2093.7Drive01_OVERRIDE 对应r2050[4];p2646=r2050[4]; 需要设置一个值,//p2642=r2060[5] MDI 位置给定(单位:LU);//p2643=r2060[7] MDI 速度给定(单位:1000LU/min)//2644=r2050[9] MDI 加速度(4000h 对应100%)//2645=r2050[10] MDI 减速度(4000h 对应100%)//自由连接的过程数据字p2051[0]=r2089[0]=p2080[0...15]p2051[1]=r2089[3]=p2083[0...15]p2051[2]=r2089[4]=p2084[0...15]p2051[3]=r2089[1]=p2081[0...15]p2051[4]=r2089[2]=p2082[0...15]p2061[5]=r2521 位置实际值p2061[7]=r0063[0] 转速实际值p2051[9]=r2131p2051[10]r2132自由连接。
V90 EPOS控制相关参数设置
PLC通过PROFINET与V90 PN伺服驱动器搭配进行位置控制,使用V90 PN的其本定位功能(EPOS)时,需要使用调试软件V-Assistant对V90 PN进行项目配置。
1. 设置控制模式为"基本位置控制(EPOS)"
2. 配置通信报文为西门子报文111
3. 点击"设置PROFINET->配置网络",设置V90的IP地址及设备名称
注意:设置的设备名称一定要与S7-1500项目中配置的相同。
参数保存后需重启驱动器才能生效。
4. 设置机械结构相关参数
需要设置正确的齿轮比,以及设置负载转动一圈物体移动距离所对应的长度单位(LU)。
如果定义1LU对应0.001mm,负载转动一圈移动10mm,则此时负载转动一圈对应的长度单位为10000LU。
5. 设置基本定位功能的相关参数
可设置最大加减速度,运行程序段的参数、Jog点动参数和定位监控窗口参数。
6. 设置回零相关参数
7. 其他相关基本定位参数,在参数列表中设置。
西门子V90伺服111报文
的插入及使用
软件版本:TIA V14 SP1 Professional
1、在硬件目录依次找到“其他现场设备”、“PROFINET IO”、“Drives”、“SIEMENS AG”、“SINAMICS”
2、在“SINAMICS”中最后一个设备可以看到V90伺服,将其拖入网络视图中,如下图所示
3、进入伺服设备视图,选择“以太网址”,设置“子网”和“IP地址”
4、子网设置好,回到网络视图,点击伺服上的“未分配”,可以看见跳出两个选择,点击“PLC_1.PROFINET借口_1”
5、选择好后,就将该伺服控制器与PLC_1连接起来了,完成效果如下图所示,下面还需将该伺服组态与伺服控制指令块匹配
6、回到伺服设备视图,向左拉出右侧设备概览图,从右侧的子模块里选取“西门子报文111,PZD-12/12”,拖到伺服的设备概览图
7、报文拖进以后,查看报文属性,选择“硬件标识符”,可以看到该报文标识符为“280”,下面需要用到此标识符
8、在程序段里,插入FB284-“SINA_POS”伺服控制指令,该指令可以从右侧全局库里的“Drive_Lib_S7_1200_1500”,“主模板”,“03_SINAMCS”中找到
9、为了将该FB284指令块与上面的伺服设备匹配,将HWIDSTW,HWIDZSW设为报文标识符280。