S120控制单元cu320 调试纪录
- 格式:doc
- 大小:2.38 MB
- 文档页数:15

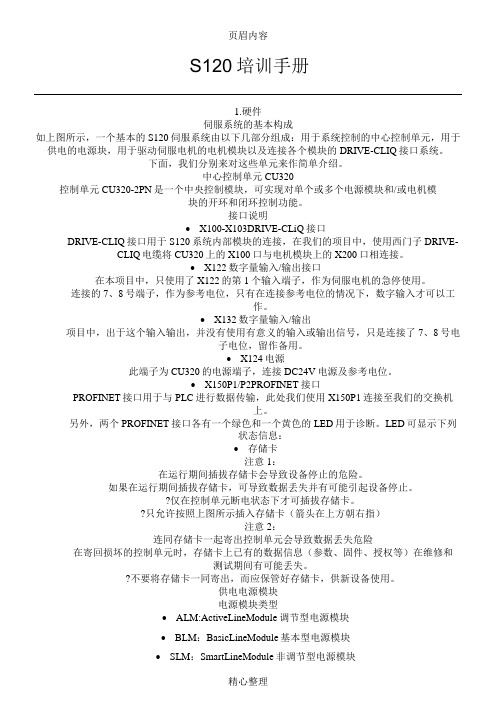
CU320-2DP CU310DP CU310PN名称外形订货号6SL3040-1MA00-0AA06SL3040-0LA00-0AA16SL3040-0LA01-0AA1功能特征无模拟量输出无模拟量输出无模拟量输出名称TB30 (端子插板)TM31(端子模块)BOP 20(简易操作面板)外形订货号6SL3055-0AA00-2TA06SL3055-0AA00-3AA16SL3055-0AA00-4BA0功能扩展I/O 模板扩展I/O 模板读写、监控、修改驱动参数特征(1) 直接插入Simotion D 或CU320 插槽中。
(2) 4 路数字量输入。
4 路数字量输出。
2 路模拟量输入。
2 路模拟量输出。
(1) 通过Drive-CLiQ 连接。
(2) 8 路数字量输入。
4 路双向 数字量输入/输出。
2 路数字量输出(继电器)。
2 路模拟量输入,2 路模拟量输出。
1 路温度传感器输入 PTC 或KTY。
2个 Drive-CLiQ 接口。
(1) 直接插到CU310DP 、CU310PN 或CU320 上。
(2) 能读写或监控参数相关参数。
CUA31CF 卡(CU320-2DP)(不带性能扩展)CF 卡(CU320-2DP)(带性能扩展)6SL3040-0PA00-0AA16SL3054-0ED00-1BA06SL3054-0ED01-1BA0AOP30高级操作面板SMC30(编码器转换模块)CBE20(CU320 ProfiNet 通讯板)6SL3055-0AA00-4CA36SL3055-0AA00-5CA26SL3055-0AA00-2EB0将TTL 或HTL 信号转换为Drive-CLiQ 信号CU320 Profinet 通讯接口板(1).通过Drive-CLiQ 连接。
(2).用于下列编码器HTL 双极信号)。
(3).15 针编码器接口,含有温度传感器信号。
(4)端子X521/X531 编码器接口信号(5).1 个DC 24V 电源连接器。
![S120调试个人记录[整理]](https://img.taocdn.com/s1/m/3df87411e97101f69e3143323968011ca300f785.png)
S120调试个人记录首先安装STA TR软件,(软件要在S7-5.5基础上安装)安装TOOLBO X,在plc硬件组态完成后,进入START软件1 清零:-----先在线--------再清零2 搜寻节点:--- 169.254.11.22选择S70NLINE或device根据情况而定。
PG/PC选择当前笔记本的网卡形式IP设置完成以后点击3 连接目标驱动:Project/connect to selected target device若出现这个警告说明没连接上,解决方法是点击选择Device方式尝试一下。
检查网线,检查IP设置。
(注:改变连接方式时要保证跟commiss interfac e 的一致)4 查看是否连接到伺服:点击5 把项目上传到PC,:点击Automatic configation create6 伺服轴配置:点击伺服轴部分,连续Next是否带包扎设置设置成1或设置成外部接线(目的是通知CU320Next选择110报文,然后点击完成各个伺服轴都按照以上6的步骤设置7 设置报文选择自由报文修改完成后点击进入控制字,状态字设置画面,根据PLC UDT999的定义设置就好。
问题1:当硬件地址设定与报文设定一致,但报文出现问号时,点击报文画面右下角的set up address ,但必须是硬件组态处于关闭状态,要不不能点击。
8 绝对值原点的设置:进入Basic positioner ,→homing9 加速度的设定:参数设置1120在跑MDI 方式时需要设定2644,2645这两个参数10 正反转设定:一旦电机方向反了,改正1821,变成0或1.改前先改p10改成3,然后再改过来。
控制字的个数。
(可以再硬件组态中改)想改就不能是对号的,要在叹号下才能改。
11 螺距改动:在Mechanics 中改12 限位的设置:硬极限的设定也可以改变开闭点。

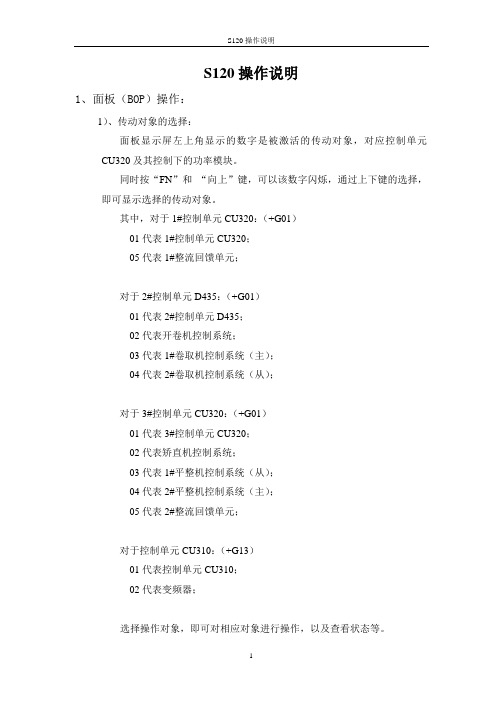
S120操作说明1、面板(BOP)操作:1)、传动对象的选择:面板显示屏左上角显示的数字是被激活的传动对象,对应控制单元CU320及其控制下的功率模块。
同时按“FN”和“向上”键,可以该数字闪烁,通过上下键的选择,即可显示选择的传动对象。
其中,对于1#控制单元CU320:(+G01)01代表1#控制单元CU320;05代表1#整流回馈单元;对于2#控制单元D435:(+G01)01代表2#控制单元D435;02代表开卷机控制系统;03代表1#卷取机控制系统(主);04代表2#卷取机控制系统(从);对于3#控制单元CU320:(+G01)01代表3#控制单元CU320;02代表矫直机控制系统;03代表1#平整机控制系统(从);04代表2#平整机控制系统(主);05代表2#整流回馈单元;对于控制单元CU310:(+G13)01代表控制单元CU310;02代表变频器;选择操作对象,即可对相应对象进行操作,以及查看状态等。
2)、参数的更改:在选择好传动对象后,可以进入想要查找的参数。
改变参数值,须先按动“FN”键,相应的参数位闪烁后方可通过上下键更改,按“P”键确认。
如果不能找到想要查看的参数,须回到传动对象为控制单元(即传动对象显示01),将参数P0003=3,可显示完全参数列表。
参数改动后,显示屏中“S”出现,说明参数存储区“RAM”和“ROM”不一致,此时须常按“P”键三秒钟,将参数写入ROM。
3)、故障复位:控制单元报故障,面板右上方红色故障灯点亮,需按“FN”键进行复位;D435控制单元的故障,可由控制柜(+G01)柜门按钮进线复位。
天津天传电气有限公司2012年3月20日。

博途软件怎么调试S120
基于博途V15的S120调试
从博途V15开始,Startdrive软件可⽤于配置和调试S120 产品(CU320-2PN )。
可以使⽤Startdrive执⾏以下任务,例如:可以把驱动器、PLC和HMI 创建在统⼀的项⽬中。
通过⾃动配置或者⼿动选择所使⽤的功率单元,电机和编码器来组态驱动器。
通过指定命令源,设定值源,为驱动器分配参数和控制类型。
使⽤向导界⾯来扩展参数分配功能块和技术控制器。
通过控制⾯板测试电机和观察状态。
发⽣错误时执⾏诊断,集成TRACE录波功能。
Startdrive的操作极其简便:
1)在⽹络视图添加S120:
2)在添加的控制单元上点击右键,选择“设备配置检测”:
3)⾃动识别DRIVE-CLiQ上的所有设备,可以创建伺服或者⽮量控制对象:
4)选择没有⾃动识别的电机(没有DRIVE-CLiQ接⼝):
5)配置通信报⽂:
6)优化并且测试电机,完成配置:
技成培训⽹整理发布
如果对您有帮助,请下载惠存。
S120变频器的调试方法及故障处理(工程师培训)结合STARTER软件进行S120的参数设置(调试过程和调试步骤)(一) 变频器的安装就位 (1)(二) 变频器的上电检查工作 (1)(三)变频器的上电 (2)(四)变频器的调试 (2)(一) 变频器的安装就位1、变频器柜体出厂前测试好,所有的说明书合格证以及需要到现场安装的设备或备件都装好,并出具详细的装箱清单。
2、运输过程中,注意防雨,防碰,防倾倒3、运到现场,先查验装箱清单,验货。
从车上把柜体运输到配电室注意防雨,防碰,防震动。
4、变频器就位,穿母排,注意把变频器上部用塑料布或其他封住,防止掉落进铜丝、电线、螺栓、垫片等(因为上部一般都用来散热,敞口)(二) 变频器的上电检查工作第1步:我们先看变频器有没有损坏或碰坏的痕迹,看电气元器件型号和设计原理图上是否一致,确保要一样。
要么是供货不对,要么是原理图不对。
总之“确保实物和设计原理图型号一致”。
第2步:把变频器柜内的干燥剂、塑料(减震防碰的材料)通通拿走;第3步:检查变频器的主回路连接包括变频器的进线,变频器的出线,制动单元,制动电阻,电机的接线。
做到:使用万用表欧姆档验证接线正确;使用螺丝刀验证接线端子紧固;确保变频器进线“相与相无短路”、“相与地无接地”情况发生。
“制动单元的进线极性正确”、“制动单元的出线没有接地,并且阻值和制动电阻一样。
使用万用表测量电机三相绕组无断路,正常值U2-V2、V2-W2、U2-W2在零点几欧姆。
第4步: 检查变频器的控制回路,做到接线紧固,正确,确保没有短路,接地发生。
第5步:检查电机接线,测量电机绝缘,保证电机能够转动。
确保无接地、断路、短路情况发生。
第6步:检查变频器的接地情况,电机的接地情况。
第7步:考虑到电机要做优化,提前通知甲方脱开负载,并现场亲自确认。
以上工作都要做到位,并填写上电前的工作内容和测量表。
(三)变频器的上电1 先测量变频器的进线断路器的进线电压相序正确,三相电压值正确(符合变频器的输入范围),三相电压平衡。
S120调试连接CU320-2DP的LAN口100与整流器400口连接,101与逆变器400口连接,102与编码器500口连接,插入CF卡后送电,等待CF卡及整流器、逆变器RDY指示灯闪烁后变常绿(扫描版本信息)即可开始调试。
硬件升级后要重上电调试CU320-2DP IP=169.254.11.22 DPH=0 DPL=0 p918=6(DP地址)打开STARTER软件1、新建一个项目并输入名字2、点击扫描节点在线扫描扫描到节点后勾选节点,点接受左侧菜单树出现装置DRIVE后关闭扫描窗口3、在线读取装置点connect to selected starget devices读出,LOAD TO PG 。
左侧装置前变绿后关闭4、选中左侧装置Drive unit变灰后点Restere factory settings 恢复工厂设定后点OK5、点左侧Automatic configuration 自动配置组态→First configuration→configuration start→选择Vector 矢量→create创造创建完成后点击离线GO OFFLINE离线修改参数6、配置控制单元1、选去控制单元CONTROL UNIT变灰,出现控制单元装置配置窗口,点WIZARD进行配置选择插件NO OPTION MODULE >NEXT>选择报文999自由报文NEXT>FINISH完成2、定义CU320输入输出端子及屏蔽报警信息选取IN/OUTPUTS定义启动整流器端子X132-1/DI4定义逆变器报警端子X122-9/DO8选取R2139 BIT3 FAULT 定义整流器报警端子X132-9/DO8选取R2139 BIT3 FAULT屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=37、选取整流单元INFEED/S INF02变灰,出现控装置配置窗口,点WIZARD进行配置选择型号选择电压选择报文NEXT>FINISH完成屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=38、选取逆变单元DRIVES/VECTOR 03变灰,出现控装置配置窗口,点CONGIGURE DDS进行配置1、选择有编码器矢量控制模式21 无编码器矢量20 V/F模式02、选择逆变器型号4、选择无滤波器选择无滤波器5、选择高负载矢量驱动6、选择电机类型为感应电动机7、输入电机铭牌数据,冷却方式为强制风冷(可用默认)8、默认计算数据9、电机不带抱闸10、选编码器无编码器有编码器点der配置编码器OK后变成自定义11、标准矢量控制及电机识别先不做以防报警后作12、逆变器报文13、修改加减速时间和最高速度NEXT>FINISH完成屏蔽通讯中断报警信息选取EXPERT LIST将P2118.0=1910 P2119.0=39、报文排序选取MESSAGE FRAM CONFIGUATION用下箭头将CONTROL/S INT报文下移到WITHOUT PZDS下P1200=1 转速跟踪P1110=1 禁止反转显示基准频率P2000=1000(6级电机)750(8级电机点击励磁时间P346=3 电机大时减至1 提高从0速启动时间10、以上配置完成后编译保存11、在线连接点击在线后进行下装load project totarget system 点击Yes12、在线下装完成保存至CF卡13、电机优化1、进入Drives目录下commissioning目录下stationary/turning,2、选择stationary→Activate对电机进行静态优化。
1、在PLC硬件组态里先配置好CU320:在Survey栏目配置好Control Unit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括Control Unit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS 和DRIVES配置CONFIGURATION(默认既可):5、然后根据实际项目需要可能需要更改INFEEDS和DRIVES中的一些参数EXPERT—-EXPERT LIST: INFEEDS: P10 –0 READY;1—QUICK COMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为0), P210 Drive unit line supply voltage驱动器实际供电电压可能和选型不一致。
DRIVES: Change parameter p1821 if need to change direction,p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust,p2585 jog speed如果采用手动方式,需要在Configure drive unit窗口中逐步配置,并修改以上的参数。
6、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
8、基本控制JOG方式:COMMISSIONING – CONTROL PANEL(必须在ONLINE)9、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCE POINT SET左边状态灯变成绿色。
10、原点设置完成后,再次下载(将原点设置保存到ROM中),断开PC控制,由PLC通过正确的报文来控制。
遇到的问题和解决方法:1、出现SMART MODE 和不支持同步方式的报警:需要在TOPOLOGY界面里将set和actual的树形结构变成一致(下面截图为离线状态,连线后会同时出现set 和actual的比较画面)。
2、出现p1248[0...n] DC link voltage threshold lower报警:需要对drive的configuration中进行逐步配置:3、出现control panel 中switch-on disable is active 的问题:infeeds中参数r898.6被置位了,检查程序。
(可以将fb13的NW10中的L 0.0 BYTE 2 更换为DB1.DBX0.0 BYTE 2,其中DB1为自己新建,内容和TEMP 区ZSWA结构一样。
)4、如果是online状态下修改参数,要使修改参数生效,应该先执行项目上传,然后再下载到ROM中。
5、下载过程如果出现错误,可能需要先按下急停,断开plc的控制。
6、FB86中代码说明:读/写参数号读/写数值将P2507参数写数值2,将当前位置置0,并将偏移值写入P2525。
下面指令是将变化写入到ROM中:参考点设置方法参考文档S120通过111报文实现基本定位功能.pdf(P9-15)绝对值编码器的回零方式有3种:1.主动回零2.直接设置参考点:激活定位功能,接通运行使能P840,激活设置参考点命令P2596,将当前位置设置为P2599中的数值(比如0)。
3.被动回零:启动寻零位,让伺服运动(JOG或MDI),当P488/489定义好的快速输入接通,将当前位置设为0。
以上3中方法,只有第一种方法可以掉电保存。
实际电流值(扭矩)的转换:PCD_RD.RD_PCD.Torque(通过报文读来的电流/扭矩数值,可设置)/4000H(4000H对应100%),这个比数代表着实际扭矩和设定的基值电流/扭矩(基值电流在P2002中设置,默认是100A;参考扭矩在P2003中设置,默认是1NM)的百分比。
S120的一些常用参数:实际速度,电流,扭矩显示值(平滑处理过,100ms),未处理的过程实际值为r63,r68,r80速度,电压,电流,扭矩,功率,角度和加速度的基值:PLC→S120的报文(telegram111):S120→PLC的报文(telegram111):安全停车功能:硬件上:由于111报文此处为预留地址,用户可在此自行指定报文内容两个端子必须同时动作,否则会产生错误。
相关参数:P9601,9602,P9501对于带抱闸的电机:1.P1215必须设置为1-3,如果设置为0,即使电机运行,抱闸将一直关闭,直到烧毁。
2.如果要使抱闸一直打开,可以将P855设为1.3.当P1215=1或者3,下面这些信号的丢失都会导致抱闸关闭:p0844, p0845 or p0852 or as a result of a fault withOFF2 response4.如果导入的配置中选了"no holding brake present",系统会自动识别抱闸的类型,如果检测到抱闸,将自动将配置改为"motor holding brake as for sequence control".5.如果使用的是电机内部抱闸,P1215不能设为3.6.如果使用的是外部抱闸,P1215=3,且必须指定给r0899.12一个外部信号。
7.When the function module "extended brake control" is activated (r0108.14 = 1), r1229.1 should be interconnectedas control signal.The parameter can only be set to zero when the pulses are inhibited.The parameterization "no motor holding brake available" and "Safe Brake Control" enabled (p1215 = 0, p9602 = 1, p9802 = 1) is not practical if there is no motor holding brake.The parameterization "motor holding brake the same as sequence control, connection via BICO" and "Safe Brake Control" enabled (p1215 = 3, p9602 = 1, p9802 = 1) is not practical.如果使用的是安全抱闸继电器,第二个选项必须设置为Brake control with diagnostics evaluation 。
如果使用的是普通抱闸继电器,第二个选项必须设置为Brake control without diagnostics evaluation 。
参考Adobe Acrobat 7.0Documentp2571 EPOS maximum velocityChangeable: U T Calculated: - Access level: 1 Data type: Unsigned32 Dynamic index: - Function diagram: 3630Object: SERVO (EPOS), VECTOR (EPOS) P group: Basic positioner Version: 2603900Group of units: - Unit selection: -Not for motor type: - Expert list: 1 MinMaxFactory setting 1 [1000 LU/min]40000000 [1000 LU/min] [0] 30000 [1000 LU/min] Description:Sets the maximum velocity for the function module "basic positioner" (r0108.4). Dependence:see also: r1084, r1087, p2503, p2504, p2505, p2506Note:The maximum velocity is active in all of the operating modes of the basic positioner. The maximum velocity for the basic positioner should be aligned with the maximum speed/velocity of the speed/velocity controller:Rotary encoders:p2571[1000 LU/min] = min(|r1084|, |r1087|)[1/min] x p2505/p2504 x p2506/1000Linear encoders:p2571[1000 LU/min] = min(|r1084|, |r1087|)[m/min] x p2503/10[m]P2571Y----15A,3000RPM 72000T----15A,3000RPM 72000X----8A,6000RPM 100000。