S120控制单元cu320 调试纪录
- 格式:doc
- 大小:1.65 MB
- 文档页数:8

西门子S120(5#桥)调试总结整理人:韦同旺一..Drive-CLIQ电缆连接方式:如图1中为CU320与主起1#,主起2#,小车的Motor Module的Drive-CLiQ的连接方式如图2 中为CU320与大车变频器的连接方式Drive-CLiQ连接方式有两种:一种是串联方式(站点比较多的时候运用,但一个网口最多能够串联8个部件),一种为并联方式(上图使用的就是并联方式)备注:ALM的Drive-CLiQ以连接完成。
二.编码器的接线1.编码器采用的是HID100H Incremental编码器端接线方式为: Brown----------------Vcc DC24V正极White-----------------0V DC 负极Green-----------------A+ 信号线A+Yellow----------------B+ 信号线B+SMC30端接线方式为: X521端子号1 -----------A+ 信号线A+X521端子号3-----------B+ 信号线B+X531端子号1------------Vcc DC24V正极X531端子号2------------0V DC 负极三.ALM接线1.检查ALM接线若内部没有给预充电K4供电时,需外供AC 220V电源若内部没有风机供电电源时,需外供AC 220V电源若内部没有供DC 24V电源时,需外供DC 24V电源四.通讯及逆变器是否正常1.硬件组态下载到PLC中,打开STARTER软件,新建一个项目,首先使用网线使CU320与电脑进行连接。
在组态中,点击自动搜索后,会自动完成对CU320的搜索,完成后把项目上传到电脑中。
根据硬件组态中的地址进行设置并对CU320上的地址进行设置(STARTER 中会显示设置的方式)。
在硬件组态中查看通讯是否正常,正常时各CU320上DP指示灯常亮。
2.当DC24V送电后,检查各逆变器模块的指示灯,若显示红灯时则模块不正常。

S120变频器的调试方法及故障处理(工程师培训)结合STARTER软件进行S120的参数设置(调试过程和调试步骤)(一) 变频器的安装就位 (1)(二) 变频器的上电检查工作 (1)(三)变频器的上电 (2)(四)变频器的调试 (2)(一) 变频器的安装就位1、变频器柜体出厂前测试好,所有的说明书合格证以及需要到现场安装的设备或备件都装好,并出具详细的装箱清单。
2、运输过程中,注意防雨,防碰,防倾倒3、运到现场,先查验装箱清单,验货。
从车上把柜体运输到配电室注意防雨,防碰,防震动。
4、变频器就位,穿母排,注意把变频器上部用塑料布或其他封住,防止掉落进铜丝、电线、螺栓、垫片等(因为上部一般都用来散热,敞口)(二) 变频器的上电检查工作第1步:我们先看变频器有没有损坏或碰坏的痕迹,看电气元器件型号和设计原理图上是否一致,确保要一样。
要么是供货不对,要么是原理图不对。
总之“确保实物和设计原理图型号一致”。
第2步:把变频器柜内的干燥剂、塑料(减震防碰的材料)通通拿走;第3步:检查变频器的主回路连接包括变频器的进线,变频器的出线,制动单元,制动电阻,电机的接线。
做到:使用万用表欧姆档验证接线正确;使用螺丝刀验证接线端子紧固;确保变频器进线“相与相无短路”、“相与地无接地”情况发生。
“制动单元的进线极性正确”、“制动单元的出线没有接地,并且阻值和制动电阻一样。
使用万用表测量电机三相绕组无断路,正常值U2-V2、V2-W2、U2-W2在零点几欧姆。
第4步: 检查变频器的控制回路,做到接线紧固,正确,确保没有短路,接地发生。
第5步:检查电机接线,测量电机绝缘,保证电机能够转动。
确保无接地、断路、短路情况发生。
第6步:检查变频器的接地情况,电机的接地情况。
第7步:考虑到电机要做优化,提前通知甲方脱开负载,并现场亲自确认。
以上工作都要做到位,并填写上电前的工作内容和测量表。
(三)变频器的上电1 先测量变频器的进线断路器的进线电压相序正确,三相电压值正确(符合变频器的输入范围),三相电压平衡。
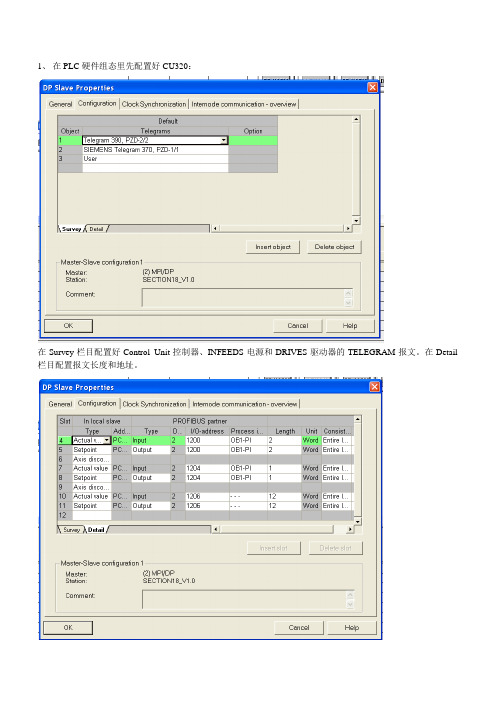
1、在PLC硬件组态里先配置好CU320:在Survey栏目配置好Control Unit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括Control Unit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS 和DRIVES配置CONFIGURATION(默认既可):5、然后根据实际项目需要可能需要更改INFEEDS和DRIVES中的一些参数EXPERT—-EXPERT LIST: INFEEDS: P10 –0 READY;1—QUICK COMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为0), P210 Drive unit line supply voltage驱动器实际供电电压可能和选型不一致。
DRIVES: Change parameter p1821 if need to change direction,p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust,p2585 jog speed如果采用手动方式,需要在Configure drive unit窗口中逐步配置,并修改以上的参数。
6、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
8、基本控制JOG方式:COMMISSIONING – CONTROL PANEL(必须在ONLINE)9、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCE POINT SET左边状态灯变成绿色。

通过S120变频器实现高炉探尺的精准控制1 背景机械探尺是高炉冶炼时用来检测高炉内部物料料面深度的关键设备,探尺的可靠运行是高炉顺利运行的前提和保障。
它是炼铁高炉上料系统的重要组成部分,主要用于检测炉内物料的深度,当下完一批料,探尺自零位自动下放,下放至炉内料面后,探尺被物料支撑,其速度减至零,但不能出现倒尺或埋尺,然后在冶炼进程中要跟随料面下降,当探尺下放到设定深度时,自动提升到零位。
如此往复,检测深度,以供操作人员设定矿石与焦炭等物料的布料角度、以及圈数。
2 机械探尺的工作原理机械探尺设备装置多为链条式结构,主要由电机、卷筒、链条、重锤及电气控制系统组成,将链条固定于卷筒上,链条下端挂上重锤,链条和重锤深入高炉内部,通过电机驱动控制重锤的上升的下降。
在实际工作中它有三种工作方式:提尺、放尺、料面跟随,根据工艺必须满足以下要求:1)提尺快速、稳定,在达到零位时必须可靠、准确停尺。
2)放尺要匀速,不能出现卡顿和惯性冲尺现象。
3)料面跟随要灵活,不能出现卡尺、倒尺、埋尺,造成链条断和重锤烧损。
2.1 提尺的力矩关系探尺向上提尺时,变频器为纯速度控制控模式,此时电机的运行方向和重锤的运行方向相同,但是电机的力矩Md与探尺重锤的重量Mg探尺链条的重量M1摩擦力矩Mz的力矩相反如图1 所示,电机力矩关系为:2.2 探尺放尺的力矩关系探尺放尺是利用重锤与链条的自身重量来进行一定的传动,此时变频器处于速度闭环控制状态,在Md的调节下,重锤以恒速V 下落,此时电机驱动力矩与探尺重锤及链条的重力力矩方向相反,运行方向与重锤运动方向相同,力矩关系为:2.3 探尺料面跟随的力矩关系探尺在匀速下放的过程中,当重锤触及料面时,电机转矩会突然变小。
变频器自动切换到力矩控制。
跟尺时探尺锤头受到料面的支撑,重锤的重量Mg消失,在料面下降。
支撑力消失时重锤的重量Mg出现,为保证测量料面的准确性,要求重锤立于料面而不倒,电机要产生保持向上的张力Md拉住重锤而不出现倒锤。

SINAMICS S120 调试手册目录SINAMICS S120 调试手册 (1)第一章 S120产品介绍 (4)第二章项目组态与调试 (10)2.1调试软件介绍 (10)2.2S120硬件组态 (10)2.3S TARTER项目列表 (18)第三章电机优化 (33)3.1S120驱动感应电机的优化 (33)3.2S120驱动第三方伺服电机时的优化 (36)第四章 S120的基本定位 (37)4.1激活基本定位功能 (38)4.2基本定位_点动(JOG) (40)4.3基本定位_回零(H OMING /R EFERENCE) (41)4.4基本定位_限位(L IMIT) (46)4.5基本定位_程序步(T RAVERSING B LOCKS) (47)4.6手动数据输入(MDI) (48)第五章通讯 (51)5.1S120与PG/PC的串口 (51)5.2S120与TP170 (52)5.3S120、TP170B与S7200的联接 (56)5.4通过DP总线实现S7-300与SINAMICS S120通讯 (61)5.5用DP总线对电机起、停及速度控制 (76)5.6驱动器参数的读取及写入 (78)5.7S120的“从对从”方式(S LAVE - TO -S LAVE) (86)5.7.1通过Slave to Slave 方式实现各从站之间通讯 (86)5.7.2 Slave-to-slave 功能配置: (87)5.7.3 从站参数配置 (88)5.7.4激活Slave to Slave 功能 (89)第六章 S120 DCC功能 (90)第七章自由功能块 (97)第八章 SINAMICS S120 参数简介 (98)第九章 S120的故障与报警 (101)相关参考手册 (102)IA&DT Service & Support Page 3-104第一章 S120产品介绍Sinamics S120集矢量控制与伺服控制于一身,分为DC-AC与AC-AC两种类型,所谓DC-AC,是指控制单元、整流、逆变都为独立模块,目前DC-AC类型功率范围从0.9kw到1200kw,AC-AC模块由控制单元和功率模块组成,功率范围从0.12到250kw。
基于博途V15的S120调试
从博途V15开始,Startdrive软件可用于配置和调试S120 产品(CU320-2PN )。
可以使用Startdrive执行以下任务,例如:
✧可以把驱动器、PLC和HMI 创建在统一的项目中。
✧通过自动配置或者手动选择所使用的功率单元,电机和编码器来组态驱动器。
✧通过指定命令源,设定值源,为驱动器分配参数和控制类型。
✧使用向导界面来扩展参数分配功能块和技术控制器。
✧通过控制面板测试电机和观察状态。
✧发生错误时执行诊断,集成TRACE录波功能。
Startdrive的操作极其简便:
1)在网络视图添加S120:
2)在添加的控制单元上点击右键,选择“设备配置检测”:
3)自动识别DRIVE-CLiQ上的所有设备,可以创建伺服或者矢量控制对象:
4)选择没有自动识别的电机(没有DRIVE-CLiQ接口):
5)配置通信报文:
6)优化并且测试电机,完成配置:
技成培训网整理发布
如果对您有帮助,请下载惠存。
西门子S120(5#桥)调试总结整理人:韦同旺一..Drive-CLIQ电缆连接方式:如图1中为CU320与主起1#,主起2#,小车的Motor Module的Drive-CLiQ的连接方式如图2 中为CU320与大车变频器的连接方式Drive-CLiQ连接方式有两种:一种是串联方式(站点比较多的时候运用,但一个网口最多能够串联8个部件),一种为并联方式(上图使用的就是并联方式)备注:ALM的Drive-CLiQ以连接完成。
二.编码器的接线1.编码器采用的是HID100H Incremental编码器端接线方式为: Brown----------------Vcc DC24V正极White-----------------0V DC 负极Green-----------------A+ 信号线A+Yellow----------------B+ 信号线B+SMC30端接线方式为: X521端子号1 -----------A+ 信号线A+X521端子号3-----------B+ 信号线B+X531端子号1------------Vcc DC24V正极X531端子号2------------0V DC 负极三.ALM接线1.检查ALM接线若内部没有给预充电K4供电时,需外供AC 220V电源若内部没有风机供电电源时,需外供AC 220V电源若内部没有供DC 24V电源时,需外供DC 24V电源四.通讯及逆变器是否正常1.硬件组态下载到PLC中,打开STARTER软件,新建一个项目,首先使用网线使CU320与电脑进行连接。
在组态中,点击自动搜索后,会自动完成对CU320的搜索,完成后把项目上传到电脑中。
根据硬件组态中的地址进行设置并对CU320上的地址进行设置(STARTER 中会显示设置的方式)。
在硬件组态中查看通讯是否正常,正常时各CU320上DP指示灯常亮。
2.当DC24V送电后,检查各逆变器模块的指示灯,若显示红灯时则模块不正常。
关于S120转矩控制的问题?楼主2012-12-18 22:02:02给位大侠,请问S120中转矩控制的话,怎么控制转速?我看功能图转速限幅在速度控制器之前,转矩给定的话(P1503),速度会不会飞车?就像如果是速度控制转矩限幅,完全可以实现转矩限幅起到作用,达到想要的转矩,可是转矩控制我不是很理解引用收藏(2)“点赞”也能得经验值啦!1更多Zane至圣经验值: 19150发帖数: 11597精华帖: 151回复:关于S120转矩控制的问题?1楼2012-12-18 23:06:31这就是力的平衡关系,输出转矩大于阻力矩就加速,小于阻力矩就减速,等于就匀速或静止。
Zane 注册自动化系统工程师Always save before download引用收藏飞华侠士经验值: 1846发帖数: 444精华帖: 2回复:关于S120转矩控制的问题?2楼2012-12-31 23:25:19quote:以下是引用Zane在2012-12-18 23:06:31的发言:这就是力的平衡关系,输出转矩大于阻力矩就加速,小于阻力矩就减速,等于就匀速或静止。
转矩控制时速度无法控制,它时以转矩控制为第一目标,有可能是飞车.它有辅助的速度限制.防止飞车.引用收藏李文华侠圣经验值: 2554发帖数: 654精华帖: 17回复:关于S120转矩控制的问题?3楼2013-01-02 13:37:20quote:以下是引用飞华在2012-12-31 23:25:19的发言:quote:以下是引用Zane在2012-12-18 23:06:31的发言:这就是力的平衡关系,输出转矩大于阻力矩就加速,小于阻力矩就减速,等于就匀速或静止。
转矩控制时速度无法控制,它时以转矩控制为第一目标,有可能是飞车.它有辅助的速度限制.防止飞车.如果转矩设定大于负载转矩,电机的速度将一直上升到接近同步转速(转子不切割磁力线就不会有转矩),那能否在转矩模式下将最大速度或频率限制在额定转速以下的某个值?如何限制?引用收藏李文华侠圣经验值: 2554发帖数: 654精华帖: 17回复:关于S120转矩控制的问题?4楼2013-01-02 13:59:18我现在的理解是:如果将变频器输出的最高频率(如MM440的P1082)限制在30Hz,那么此时电机的同步转速就是30Hz对应的那个值,虽然给定转矩大于负载转矩,由于是异步电动机,这时的电机速度不可能超过30Hz对应的这个同步转速值(激活滑差补偿功能除外),但不能调速。
1、在PLC硬件组态里先配置好CU320:
在Survey栏目配置好ControlUnit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:
3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义
的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括
ControlUnit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS和DRIVES 配置CONFIGURATION(默认既可):
5、
6和DRIVES中的一些参数EXPERT—-EXPERTLIST:
7、INFEEDS:P10–0READY;1—QUICKCOMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为
0),P210Driveunitlinesupplyvoltage驱动器实际供电电压可能和选型不一致。
8、DRIVES:Changeparameterp1821ifneedtochangedirection,
p2571formaxspeed,p2572foraccelerationadjust,p2573fordecelerationadjust,p2585jogspeed
如果采用手动方式,需要在Configuredriveunit窗口中逐步配置,并修改以上的参数。
9、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS
10、
11、配置结束后再执行一次DOWNLOAD到PG和ROM。
12、基本控制JOG方式:COMMISSIONING–CONTROLPANEL(必须在ONLINE)
13、
14、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCEPOINTSET左边
状态灯变成绿色。
15、原点设置完成后,再次下载(将原点设置保存到ROM中),断开PC控制,由PLC通过正确的报文来控制。
遇到的问题和解决方法:
1、出现SMARTMODE和不支持同步方式的报警:
需要在TOPOLOGY界面里将set和actual的树形结构变成一致(下面截图为离线状态,连线后会同时出现set 和actual的比较画面)。
2、出现
3、出现controlpanel中(可
以将fb13的NW10中的L0.0BYTE2结构
4
5
6
7、
将P2507参数写数值2,将当前位置置0,并将偏移值写入P2525。
8、
下面指令是将变化写入到ROM 中: 参考点设置方法参考文档S120通过111报文实
现基本定位功能.pdf (P9-15)
绝对值编码器的回零方式有3种:
1. 主动回零
2. 直接设置参考点:激活定位功能,接通运行使能P840,激活设置参考点命令P2596,将当前位置设置为
P2599中的数值(比如0)。
3. 被动回零:启动寻零位,让伺服运动(JOG 或MDI ),当P488/489定义好的快速输入接通,将当前位置
设为0。
以上3中方法,只有第一种方法可以掉电保存。
实际电流值(扭矩)的转换:
PCD_RD.RD_PCD.Torque (通过报文读来的电流/扭矩数值,可设置)/4000H (4000H 对应100%),这个比数代表着实际扭矩和设定的基值电流/扭矩(基值电流在P2002中设置,默认是100A ;参考扭矩在P2003中设置,默认是1NM )的百分比。
S120的一些常用参数:
实际速度,电流,扭矩显示值(平滑处理过,100ms ),未处理的过程实际值为r63,r68,r80
速度,电压,电流,扭矩,功率,角度和加速度的基值:
PLC ✍S120的报文(telegram111):
S120✍PLC 的报文(telegram111):
1.
2. 1.
3. 当P1215=1或者3,下面这些信号的丢失都会导致抱闸关闭:
p0844,p0845orp0852orasaresultofafaultwithOFF2response
4. 如果导入的配置中选了"noholdingbrakepresent",系统会自动识别抱闸的类型,如果检测到抱闸,将自动
将配置改为"motorholdingbrakeasforsequencecontrol".
5. 如果使用的是电机内部抱闸,P1215不能设为3.
6. 如果使用的是外部抱闸,P1215=3,且必须指定给r0899.12一个外部信号。
7. Whenthefunctionmodule"extendedbrakecontrol"isactivated(r0108.14=1),r1229.1shouldbeinterconnec
tedascontrolsignal.
8. Theparametercanonlybesettozerowhenthepulsesareinhibited.
9. Theparameterization"nomotorholdingbrakeavailable"and"SafeBrakeControl"enabled(p1215=0,p9602=1
,p9802=1)isnotpracticalifthereisnomotorholdingbrake.
10. Theparameterization"motorholdingbrakethesameassequencecontrol,connectionviaBICO"and"SafeBrake
Control"enabled(p1215=3,p9602=1,p9802=1)isnotpractical.
如果使用的是安全抱闸继电器,第二个选项必须设置为Brakecontrolwithdiagnosticsevaluation 。
如果使用的是普通抱闸继电器,第二个选项必须设置为Brakecontrolwithoutdiagnosticsevaluation 。
户可在此自
行指定报文
内容
参考Adobe Acrobat 7.0 Document
p2571EPOSmaximumvelocity
Changeable:UT
Calculated:- Accesslevel:1 Datatype:Unsigned32
Dynamicindex:- Functiondiagram:3630 Object:SERVO(EPOS),VECTOR(EPOS) Pgroup:Basicpositioner Version:2603900 Groupofunits:-
Unitselection:- Notformotortype:-
Expertlist:1 Min
Max Factorysetting
1[1000LU/min]
Description:
Dependence:
Themaximumvelocityforthebasicpositionershouldbealignedwiththemaximumspeed/velocityoft hespeed/velocitycontroller:
Rotaryencoders:
p2571[1000LU/min]=min(|r1084|,|r1087|)[1/min]xp2505/p2504xp2506/1000
Linearencoders:
p2571[1000LU/min]=min(|r1084|,|r1087|)[m/min]xp2503/10[m]
P2571
Y----15A,3000RPM72000
T----15A,3000RPM72000
X----8A,6000RPM100000。