超大型船舶靠离泊操纵中拖轮助操
- 格式:pdf
- 大小:666.86 KB
- 文档页数:5


摘 要:本文分析了超大集装箱船舶靠泊时易受到的三种力(风动力、水动力和沉深横向力),并根据三种受力时的操作难点从速度、距离、角度三个方面详细论述超大集装箱船舶靠泊实操的具体注意事项,以供业界参考和讨论。
关键词:超大集装箱船 靠泊 受力分析1.超大型集装箱船的特征和特点业界普遍认为超大集装箱船应该具有以下特征:船舶总长大于 250米;型宽大于30 米;吃水大于11米,载重量超过10万吨。
超大集装箱船较其他集装箱船舶的主要特点:长宽比较其他集装箱船显著减小,单位质量获得的主机马力有所减小,舵面积比减小;旋回性能相对较差,航向稳定性较好,倒车性能较好;满载时船舶方形系数在 0.7左右;受风面积大,首尾线型尺度大,大多配置了侧推器。
2.超大集装箱船靠泊受力分析超大集装箱船靠泊一般受风动力、水动力和沉深横向力三种力的综合作用,直接影响靠泊的角度、余速和横距这靠泊三要素的具体操作。
(1)风动力风对船舶的影响可以分解为纵向力和横向力,纵向力助推船舶前进或后退,横向力Fa则使船舶发生横移位移。
风动力对集装箱船特别是满载超大集装箱船的影响较大,因此准确计算风动力对于引航安全十分重要。
根据经验值,纵向顶风4到5级时,风对船的作用力是基本阻力的10%至15%;纵向风8到9级时,风对船的作用力为基本阻力的30%至40%。
因此当有纵向顶风时,只需要操纵主机的进退,简单易行。
靠泊时,如有正横风力使船舶产生位移,一般通过拖轮和船舶自有的侧推器来克服。
横风为拢风时需要根据具体情况制定修改引航方案,甚至放弃靠泊;横风为开风时适量增加顶推力。
在靠泊前提前估算横风的大小,根据具体情况安排足够马力的拖轮。
横向风力计算公式如下:Fα=21ραCαV2αAFα: 正横风压力(N)ρα:空气密度(1.226㎏/)Cα:风动压力系数Vα:横向速度(m/s)A :船舶侧面受风面积(m2);以“天康河”超大集装箱船(长船舶类型船长L作业状态拖轮数量单船最低马力250米≤ L < 300 米靠、移、离泊3条5000马力300米≤L< 350米靠、移、离泊4条5000马力350米≤L< 370米靠、移、离泊5条5000马力L≥370米靠、移、离泊6条5000马力表1 超大型集装箱船拖轮配置表40/ 珠江水运·2018·09第一否则危害安全作业。
第20卷 第10期 中 国 水 运 Vol.20 No.10 2020年 10月 China Water Transport October 2020收稿日期:2020-09-09作者简介:杨 柏(1975-)男,上海港引航站,海港一级引航员。
浅析靠离泊中船舶与拖轮的协作杨 柏(上海港引航站,上海 200023)摘 要:船舶自身的体型与吨位大小,风向、风速和水流的方向、流速等环境因素,以及其他船舶的运行情况等,都对船舶的靠离泊产生着直接或间接影响。
一般来说,绝大多数船舶难以实现完全自主的靠离泊操作,因此,拖轮的协作往往必不可少。
靠离泊中,拖轮对船舶的基本协作方式主要有两种,一是顶推,二是横向吊拖。
根据实际情况的不同,拖轮与船舶的具体协作方式也多种多样,没有固定的模式,应当随时进行相应的选择与调整。
关键词:靠离泊;拖轮;协作;基本原理中图分类号:U666 文献标识码:A 文章编号:1006-7973(2020)10-0001-03一、在靠离泊过程中船舶需要拖轮进行协作的条件 (1)当船舶的吨位较小,且风向、风速,水流方向、水流速度等相关条件都比较平缓时,船舶可通过自身航行能力以及船首向的简单调整,在相关人员的配合下,进行自主靠离泊,无需借助拖轮的协作。
(2)在船舶的吨位较大,或者处于空载状态,或者风向、风速、水流方向、水流速度、水湾的深浅状况、天气状况等外界条件比较恶劣,或者船舶自身的性能出现问题,难以自主航行等情况下,船舶需要拖轮来进行协作,帮助船舶顺利安全地完成靠离泊的相关操作。
(3)在无拖轮靠泊的过程中,可能因为对当时潮流、风向、风力估计不充分,如果发现自行靠离泊存在困难或者风险,应当适时果断中止靠离泊操作,并寻求拖轮协作。
二、在靠离泊过程中船舶与拖轮进行协作的基本原理 1.拖轮的基本情况与工作原理现阶段的港作拖轮,按照其推进装置的区分,主要有ZP 型拖轮(ZP 传动推进器拖轮)和VSP 型拖轮(平旋推进器拖轮)。

拖轮协助大型船舶靠泊燃油控制优化◎ 李国洲 广州港股份有限公司拖轮分公司摘 要:拖轮协助大型船舶进港靠码头时,针对大船靠泊港口不同码头泊位,拖轮调度员对大船在航道的位置以及大船航速进行合理分析判断,适时备车及时到达大船带缆点进行带缆,减少拖轮空跑时间和等待时间,既节能减排又能达到拖轮燃油控制优化,降低拖轮燃油成本的效果,所以拖轮驾驶员、大船船长、引航员以及拖轮调度员等人员的高效配合尤为关键。
关键词:港口;拖轮调度;带缆点;燃油控制;优化管理1.前言目前,随着国内油价不断攀升,如何做到低碳环保节能减排,降低燃油成本,提升燃油的利用效率成为社会关注的话题,合理的拖轮调派,先进的轮机技术应用,能够采取的节能方法基本上都落实在日常的管理工作中。
新技术新装备的研发对节油只是其中一个途径,优化拖轮管理方案,制定科学合理的拖轮调派章程,减少空跑和等待时间,同时优化拖轮布局,依靠公司调度员、大船船长、拖轮驾驶员与轮机员的协同配合,合理挖掘降低拖船燃油成本的能力[1]。
公司调度应统筹整个港区的生产情况,及时掌握拖轮动态,制定其精细化调派方案,使拖轮驾驶员能保证在安全生产的情况下,依照公司的操作章程规范化操船,全过程控制拖轮燃油使用[2]。
以南沙港为例分析拖轮燃油控制优化方案,供同仁参考。
2.南沙港区拖轮协助大船进港的过程船舶进出南沙港口一、二、三、四期码头及粮食码头共有两个航道,一个是从伶仃航道36-38#浮进入南沙港的支航道;另一个是从40-42#进出南沙港池的主航道。
受南沙港池口与伶仃航道及附近水流的影响,进港大船从伶仃航道航行至港池入口时,如果进港航速过低舵效变差,风流压差影响比较明显,航向不容易把定,容易被水流压到浅滩,所以大船进港速度一般会控制在6-12节。
大船驶入港池口门后开始逐步降速,拖轮应在大船抵达港池口位置时与之相汇,协助大船稳定航向,如图2是拖轮与进港大船相汇图。
待大船船速降至6-7节后,拖轮抵达大船船舷位置准备带缆进港,拖轮在大船右舷带缆进港图(见图3),协助进港大船靠泊。

引航研究随着经济的发展及沿江港口开放,进出长江的海轮数量猛增,尺度增大,引航员对拖轮的使用日益频繁。
对于如何更好地使用拖轮,让拖轮驾驶员操纵简单易行,又有利于引航员靠离码头,现将全回转拖轮操纵特点及如何更好的利用它来协助靠离码头作如下分析。
全回转拖轮的操纵特点全回转拖轮非常灵活,现从几个方面加以说明:1.船体结构船体上层建筑较小,驾驶台较低,除空载的集箱船及汽车滚装船外靠在海轮首尾尖部桅杆及驾驶台碰不到海轮。
一般前吃水偏小,中后部吃水偏大,而螺旋桨在舵机房的下部,其沉深较小。
在船坞里整个船前倾,非常有利于泥沙底的海轮脱浅。
因为拖轮在浅区即使搭浅其螺旋桨不受影响。
舭部左右各一片减摇鲚,以减少横摇。
在船中减摇鲚的下方有海底门,内有大小冷却水阀门。
在浅区应防止海底阀吸入泥沙及杂物而影响机器的冷却。
在拖轮横摇及协助海轮靠离时,如海轮进速较快而要求拖轮丁起来时,拖轮向海轮前进方向横倾,如倾角太大海底门会露出水面而吸空,使机器排温升高。
所以靠离泊时海轮进速太快对拖轮不利,且拖轮丁起来时消耗主机功率增大,而拉顶时功率也就相应减少。
2.全回转推进器Z型推进器:因主机输出推力轴、舵机输出轴、螺旋桨轴成Z形而俗称之。
导流管和在垂面转动的螺旋桨一起在水平面上可360度的回转运动而无舵叶,能在任意方向上发出推力。
排出流向后为进车、向前为倒车、向左右两边为停车。
可通过单双车、进倒车、调整两螺旋桨角度和转速而让船做前进、后退、原地回转、横移、顶推、倒拖等各种动作。
推进效率高,同车速时后退拉力达前进推力的90%以上。
平面旋回推进器:垂直插入水中的5片流线型桨叶绕圆心在水平面上作定速旋转运动,通过调整某片桨叶的攻角而使船前进、后退、平移。
其兴浪较大,推进效率较Z型推进器差。
3.操纵手柄最常用的为双柄,一个柄控制一部推进器的推力方向及主机转速,老式拖轮为方向、转速分柄控制。
也有单柄的,舵由一个柄控制,通过电脑程序前推即前进、后拉即后退、左(右)推即横移以达到驾驶员要求的操纵效果。
第20卷 第12期 中 国 水 运 Vol.20 No.12 2020年 12月 China Water Transport December 2020收稿日期:2020-05-18作者简介:林宏品,海南省船舶引航站,一级引航员。
大型集装箱船靠离洋浦小铲滩码头操纵要点林宏品,林 山(海南省引航站,海南 海口 570100)摘 要:文本介绍洋浦港小铲滩码头通航环境,自然条件,以及大型集装箱船靠离洋浦港小铲滩码头的操纵方法和注意事项。
关键词:大型集装箱船;靠泊操纵;拖轮辅助操纵中图分类号:U675.9 文献标识码:A 文章编号:1006-7973(2020)12-0012-02洋浦港是海南核心港口,2018年底成为“国际陆海贸易新通道”新支点。
2020年6月1日,中共中央、国务院印发《海南自由贸易港建设总体方案》,根据方案大量优惠政策中涉及洋浦港。
洋浦港区小铲滩集装箱码头于2016年初开港,随着海南自由贸易港的逐步推进,洋浦小铲滩集装箱码头承载着更多的集装箱运输功能。
随着岛内贸易量增加,靠泊洋浦的集装箱船数量增加,船舶吨位也越来越大,靠离泊操纵难度越来越大,本文通过介绍小铲滩码头靠离泊方法,分析相关注意事项,供驾引人员参考。
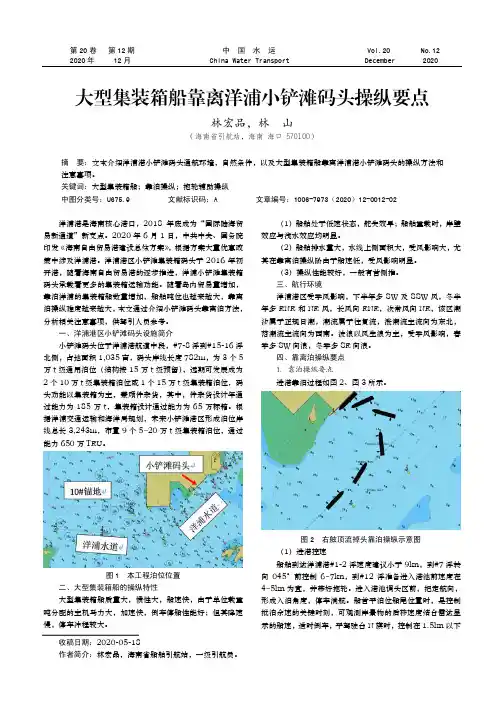
一、洋浦港区小铲滩码头设施简介小铲滩码头位于洋浦港航道中段,#7-8浮到#15-16浮北侧,占地面积1,035亩,码头岸线长度782m,为3个5万t 级通用泊位(结构按15万t 级预留),远期可发展成为2个10万t 级集装箱泊位或1个15万t 级集装箱泊位,码头功能以集装箱为主,兼顾件杂货,其中,件杂货设计年通过能力为185万t,集装箱设计通过能力为65万标箱。
根据洋浦交通运输和海洋局规划,未来小铲滩港区形成泊位岸线总长3,243m,布置9个5~20万t 级集装箱泊位,通过能力650万TEU。
图1 本工程泊位位置二、大型集装箱船的操纵特性大型集装箱船质量大,惯性大,船速快,由于单位载重吨分配的主机马力大,加速快,倒车停船性能好;但其降速慢,停车冲程较大。
⏹船在狭窄航道转向前,如果不在本船的新航向距离前转舵,就无法顺利进入新航向。
⏹船舶旋回中出现的外倾角较大而危及船舶安全时,应逐步降速,逐步减小所用舵角。
⏹旋回初径可用来估算掉头水域,⏹按规范规定,主、辅操舵装置的布置应满足当其中一套发生故障时应不致引起另一套也失效。
⏹自一舷35°转至另一舷30°的时间不超过28S.⏹按照规定,当舵杆直径大于120mm 时,其主操舵装置应为动力操纵。
⏹主操舵装置和舵杆应设计成在最大后退速度时不致损坏。
⏹辅助操舵装置应有足够强度和足以在可驾驶的航速下操纵船舶,并能在紧急时迅速投入工作。
⏹辅助操舵装置自一舷15°转至另一舷15°,所需时间不超过60S.⏹辅助操舵装置在满足操舵要求情况下,当舵柄处的舵杆直径大于230mm时,操舵装置应为动力操作。
⏹人力操舵装置只有当其操作力在正常情况下不超过160N 时方允许装船使用。
⏹主、辅操舵装置出现故障应能在驾驶台发出声光警报。
⏹主、辅操舵装置动力设备的布置应能满足能从驾驶室使其投入工作。
⏹船舶可不设辅助操舵装置的条件是主操舵装置必须具有两台或几台相同的动力设备。
⏹一万总吨以上七万总吨以下主操舵装置应设置两台或者两台以上相同的动力设备。
⏹发生单项故障导致丧失操舵能力时,应能在45S内重新获得操舵能力。
⏹若舵机制造厂欲使其符合国际海事组织相应的验收准则,则应提供相应的资料经CCs认可。
⏹手柄控制系统与随动控制系统的主要区别是无舵角反馈装置。
⏹应急舵的特点是1,无舵角反馈装置。
2手柄直接控制舵机。
⏹应急舵的基本工作原理是用控制开关直接控制继电器或其他相应装置来起动舵机工作。
⏹应急舵的操作地点是在1,驾驶台2舵机房。
⏹自动操舵仪一般都有随动操舵、自动操舵、应急操舵三种操舵方式。
⏹舵设备的试验首先进行的是系泊试验,然后是航行试验。
在这期间进行转舵周期试验。
⏹舵机每套电动机组至少连续工作30min.⏹舵叶空气气密试验,在满足压力条件下最长保持15分钟,并外涂肥皂水进行渗漏检查。
拖轮协助下的船舶操纵拖轮协助下的船舶操纵锦州港引航站姚宝明随着船舶的大型化,拖轮已经成为大船靠离泊时不可分割的一部分.本文就拖轮配合大船作业时对大船的影响.大船如何利用好拖轮,如何采取措施避免拖轮可能带来的不利因素做简要阐述.l拖轮的操纵性目前.大多数港口采用全回转拖轮.全回转拖轮是指在原地可以360o自由旋转的拖轮,一般都采用双Z型导流管式螺旋桨和中高速柴油机,又称Z型拖轮.全回转拖轮与单车船相比.其操作更方便,更灵活,适宜在有限水域操纵.该型拖轮是无舵双桨,螺旋桨叶可在360.范围内自由转动,转向灵活,旋回圈小.从进车改为倒车,只要调节螺旋桨叶方向即可,只需12s,控制性能好,可在较短时间内把船停住.在缓流无船速的情况下可横移.对本船靠离泊操纵十分有用.该船马力大,船身短,方型系数大,操纵时拖轮若想船艏先离码头或先离开有前进速度的大船时,因拖轮是以本船船尾为支点,螺旋桨距船尾很近,其推力所产生的转船力矩很有限,所以艏离比较困难;一般采取以其船头为支点,让船尾先离,待离开大船一定角度后再倒车,便可安全离开.从发挥拖轮效率的角度来讲,拖轮顶推大船比吊拖大船更能发挥效率.因为吊拖时拖轮会考虑拖缆的强度,同时拖轮倒车排出流打在大船上会使拖轮的功效降低,尤其拖缆很短时.2拖轮配备的位置大船在靠离码头时需要拖轮的协助,拖轮位置的选择很重要.如果仅从对大船的助转效果来看,拖轮配置在船舶运动方向的后端好于配置在船舶运动的前端.假如低速前进的大船旋回,受水的阻尼力矩和舵压力转船力矩的共同作用,船舶围绕转心旋转.转心位于重心之前,首柱之后.船上所有的点都围绕转心旋转(带好的拖轮也相当于船上的一个点,但它能提供动力).因船尾的拖轮距转心的距离明显大于船首拖轮距转心的距离.所以船尾拖轮产生的转船力矩明显大于船首拖轮的转船力矩.但实际操作中拖轮所带的位置不能单纯考虑获得最大转船力矩,还应考虑大船的减速,帮助大船调整靠泊角度等.如使用一条拖轮进港,在风流都不大的情况下,最好带在船头,船头拖轮的顶拖可以很好的控制船舶位置,调整靠泊角度,既方便又灵活.如果大船是空船且强吹拢风,拖轮应带在船尾,防止船尾向下风漂移太快,这样前面有锚拉船头,后面有拖轮拖船尾,利于靠泊的顺利完成.一十一+-十一+-+一+-+-+n+-+"+一+一+-+"+一—?-+低航行速度,而后视船舶平衡状态,采用舵角慢慢增大或车舵配合来达到安全转向的效果.6异常的紧急停船性能常规的各种冲程指标与一般船舶大体相同,如在空载情况下的停车冲程,倒车冲程等.值得注意的是, 在货载情况下其冲程指标就不尽相同,要看具体货载情况而论了.因半潜船货载超高超大超宽的特点,可使船舶的受风面积成倍的增加,对其冲程的影响就可想而知了.所以,船长,驾驶员在操纵船舶时,必须充分考虑具体货载使船舶受风面积剧增对船舶操纵的影响. 然而.新型半潜船"泰安口"轮拥有先进的悬挂式电动螺旋桨推进系统,两台SSP推进器,功率各为4700kW, 正车可0~155rpm无级调速,倒车在0—90rpm无级变速,360.全回转,所以在船舶需要紧急停船时,可利用船舶的反向正车(0—155rpm无级变速)来替代倒车(0~90rpm无级变速)以达到迅速停船的目的.具体操作为:如两台SSP原是处于TANDER模式全速(145rpm)航行状态,则先把转速减至50~60rpm,再把左右两SSP置于SINGLE模式(即可单独操作模式), 而后两SSP同时各转180.(左SSP顺时针转,右SSP 逆时针转以避免两SSP排出流对冲产生剧烈震动).两SSP旋转时的角速度基本保持一致,方向呈对称状态, 以防止转头现象.当两SSP分别转过180.后,重新置于TANDER模式(合并使用),可根据剩余功率,电流,电压等相关参数和速度情况,视情加减速(0—155rpm), 以及时停车停船.7结束语新型半潜船在操纵上的优越性显而易见,如果驾驶人员已能熟练掌握其操纵性能,在上述的靠离泊等操作中,没有必要把船艉两SSP的使用处于SINGLE 模式,分开使用:也可将两SSP的使用处于TANDER 模式,合并使用,因其是360.旋回,0—155rpm无级变速,在操纵上应该可以很好发挥作用了.当然,作为一名半潜船的船长和驾驶员,要充分考虑发生突发事件的可能性并对此有足够的警惕和戒备,做好相应的应急预案,以便紧急情况下能从容应对,以策安全作者:申屠启伟.中远航运股份有限公司船长《航海技术》2011年第3期如果大船使用两条拖轮靠离泊.应船头船尾各一条,船头拖轮带在艏楼或主甲板部位(空船一般带在主甲板部位,若带在艏楼部位,因空船船头艏楼位置凹陷很大,拖轮为防止驾驶台碰撞大船,采取以一定角度靠在大船上,大船很难把定,影响大船操作);船尾拖轮一般带在驾驶台下或船尾导缆孔.如大型重载船舶进港需控制速度.船尾的拖轮一般带在船尾正中间,起减速作用,待大船接近码头船速可控时,解掉船尾拖轮并移到驾驶台下带缆.如果大船靠泊时用三条拖轮,配带拖轮有两种方法:一种是大船非靠泊舷的船头船尾各一条拖轮,船尾正中间带一条拖轮;另一种是船首两舷各一条拖轮,船尾非靠泊舷带一条拖轮.待大船船速可控或接近码头时,船尾或靠泊舷拖轮移出,协助靠泊.3所需拖轮的总功率和数量计算所需拖轮总功率的方法很多,下面介绍两种估算所需拖轮总功率的经验公式:(1)风速<15m/s,流速<0.5kn时DWT万吨级船舶:(DWT)×7.4%(kW);(GT)×11%(kW);(DWT)×10%(HP);VLCC满载时:(DWT)X5.15%(kW);(DWT)×7% (HP);VLCC空载时:(DWT)X3.68%(kW);(DWT)X5% (HP).(2)所需拖轮总功率的简易算法是:依据每10000载重吨所需功率735kW(1000HP)计算而得.需要协助的拖轮数量.既要考虑大船的载态及风流情况,又要考虑是靠泊还是离泊.一般载重量万吨级及以上大船需2条拖轮,载重量10万吨级船舶需3条及以上拖轮,大船靠离泊所需拖轮最多不超过6条,不然对指挥拖轮是个考验.4拖轮的配备对船舶操纵性的影响4.1对船舶直线运动的影响(1)船舶的动航向稳定性.船舶的动航向稳定性是指当外界干扰过去之后.船舶的转头运动在不用舵纠正的情况下,尽可能稳定于新航向的性能;此时,船舶航向的稳定仅依靠水对其的阻尼力矩作用.一般方型系数较小.长宽比较大的船舶具有较好的航向稳定性,如杂货船,小型集装箱船等;方型系数较大,长宽比较小的肥大型船舶.其航向稳定性在小舵角范围内总带有不稳定性.大船向前航进,若拖轮带在大船一侧时,拖轮和大船是一体,当外界干扰过去之后,由于船舶左右舷不对称,水对船的两舷压力也不同,造成船舶容易向一侧偏转.动航向稳定性变差;当拖轮带在大船的两侧时,相当于大船的宽度增加,船舶的方型系数变大,动航向稳定性变差;当拖轮吊拖在大船船尾时.相当于增加大船的长度,则大船方型系数变小,动航向稳定性变好. (2)船舶的保向性.保向性是指船舶在外力干扰下产生船艏摇摆,通过操舵加以抑制或纠正,使船舶驶于预定航向的能力.保向性与航向稳定性密切相关,而且还受操舵人员的操舵技能,自动舵的控制能力和舵的性能等因素影响.影响保向性的主要因素还有:①方型系数:方型系数小的度削型船舶.回转阻尼力矩大,保向性好:②水线下船体侧面积形状:水线下船体侧面积在船尾分布较多,回转阻尼力矩大,保向性好;③船速:对同一艘船舶而言,提高船速,保向性也提高.船舶的保向性随着拖轮所带位置的不同而不同.在拖轮不提供动力的情况下:①当拖轮带在一侧时,由于船舶的流线型和对称性被破坏,动航向稳定性变差,在相同的船速情况下, 保向性变差:②当拖轮吊拖大船船尾时,相当于方型系数变小,保向性好:③当拖轮带在船舶左右舷对称位置,固定在大船的拖轮使大船的宽度增加.大船的方型系数变大.所以保向性变差:在拖轮提供动力的情况下(航行中一般提供首尾方向向前或向后的拉力):①如果拖轮在大船的一侧,拖轮所在位置与大船首尾中心线有一定的距离.所以拖轮提供的首尾方向的拉力所产生的转船力矩.造成大船易向拖轮方向偏转,保向性变差.②如果拖轮在大船的两侧且对称,两拖轮产生的转船力矩相互抵消,且大船因拖轮的拉力而降速,大船如维持相同船速需提高螺旋桨转速.船舶的滑失变大, 舵效变好,保向性变好.③如果拖轮带在船尾正中间,等同方型系数变小,大船维持原速度,船舶的滑失变大,舵效变好,保向性变好.4.2对船舶旋回运动的影响大船在接近掉头区前,低速航行(以船首拖轮拖大船船艏为例)如果需要掉头,此时拖轮可以采取吊拖措施帮助大船调整角度和位置.大船的旋回圈要素发生变化:(1)旋回初径:向有拖轮一侧旋转,旋回初径变小;向另一侧旋转,旋回初径变大.(2)进距:向有拖轮一侧旋转容易,航向改变90.时重心所移动的纵向距离变小;反方向旋转,进距变大. 拖轮协助下的船舶操纵——姚宝明(3)飘角:向有拖轮一侧旋转,飘角变大,反之变小;(4)船速:无论向哪一侧旋转,船速均下降,小船,空船下降更明显.4-3大船前进中拖轮协助转头时的极限航速拖轮协助大船转头时,仅能提供克服自身阻力后的剩余推力或拉力.而且剩余推力或拉力随着其航速的增加而递减.如将拖轮配置在船尾,剩余的拖力与舵力并用还是有效的:如将拖轮配置在船首,因拖轮的拖力或推力与大船舵力共同作用而使大船斜航,由斜航而产生的水动力对大船的转船力矩与大船舵力转船力矩和拖轮转船力矩方向相反,当大船航速达到一定值时.船体斜航的转船力矩超过拖力转船力矩和舵力转船力矩之和时.大船将向拖轮顶拖的相反方向转向.实践证明:前进中大船在拖轮协助转头时的极限航速一般为5~6kn:后退中顶尾时,类似情况也会出现,而且出现该情况的航速会变得更低.因此,大船在前进中拖轮协助转头时.船速越慢越有利.5协助船舶操纵时使用拖轮的注意事项(1)带拖轮时大船的速度不能太快.根据船舶间效应,船间作用力与船速的平方成正比,船速越快兴波越厉害,船舶间相互作用力越大,且小船受的影响更大.如果大船船速过快易造成拖轮与大船碰撞的危险, 所以大船带拖轮的速度应控制在7kn以下.(2)合理选择拖轮配置位置和拖力作用点.根据使用拖轮助操的目的,需合理选择拖力作用点.欲使被拖船取得最大转船力矩.拖轮应配置在船舶首尾远离重心处;欲使被拖船横移,拖轮应尽量配置在船舶重心附近.一般情况下,当拖轮协助前进中的大船回转或顶流中掉头时,将拖轮配置在船尾顶推较合理.因为这时作用于大船船体的旋转力矩即舵力转船力矩,斜航水动力转船力矩和拖力转船力矩的方向是一致的.有利于大船回转和掉头.(3)拖缆长度的选择.为了充分利用拖轮的有效拖力和操纵灵活性,应使拖缆水平俯角越小越好.离泊时一般情况俯角小于15.,即拖缆长度应大于被拖船拖缆出口至水面高度的4倍,如果高度很低.拖缆长度不应小于45m.特别是在吹拢风情况下,拖缆应放得更长,以防止拖缆受顿力而断缆.重载船离泊时拖缆也应放长些,防止拖轮排出流打到大船上,使大船离泊变得缓慢.但大船在风流较弱的情况下靠泊,拖轮缆绳可缩短到15~20m,这样可充分利用拖轮的灵活性,便于大船靠泊.(4)操纵大船时,要考虑拖轮的安全.在操纵过程中,不但要考虑大船的安全,还要考虑拖轮的安全.严防横拖与倒拖.解掉拖轮的时机最好选择在大船不动车的情况下,防止因大船动车而绞进拖轮缆绳.靠离泊时,要充分考虑拖轮的长度和宽度,给有拖轮一侧留出宽敞水域,尤其是吹开风,注意抢上风,防止拖轮不能垂直顶推大船而使大船加速向下风漂移.(5)大船要注意拖轮对大船的影响.低速前进的大船需要拖轮提供垂直推力.但拖轮总是先有角度的顶在大船上.然后慢慢调整到垂直,拖轮的有角度的顶推会引起大船加速前冲;又如两条拖轮协助大船离码头,或在大船掉头过程中,如拖轮的缆绳不能和大船保持垂直,拖缆向前或向后的分力会使大船前冲后缩,造成大船斜航,不利于大船旋转,在此情况下,大船应及时进倒车,降低船速,才能取得良好的转头效果.大船在带拖轮时要控制好自己的船速,防止拖轮碰撞大船.如果拖轮不得不带在大船的凹陷处,拖轮带好后,让拖轮放长缆绳使其贴在大船相对平坦的地方.如进港船速较快,可令舷侧拖轮平行大船向后拖,但大船要提前施舵,防止大船向拖轮一侧偏转.在操纵过程中,重载大船长时间倒车产生的偏转力是很大的,有时单凭船头拖轮的顶推是控制不住的,所以在倒车前要先让拖轮做准备,提前抑制大船偏转.还要注意由拖轮引起的前冲和后缩,需要大船及时倒车和进车,以控制船速.在靠泊过程中拖轮缆绳不宜过长以免影响拖轮顶拖的及时性,拖轮长时间顶推产生的靠拢惯性要提前抑制,以平顺地靠在码头上.6结语船长和驾引人员不仅应该掌握本船的操纵性能.还要了解拖轮的操纵性能及其使用方法,充分考虑到拖轮给本船带来的影响,做到提前防范,合理使用,才能圆满完成靠离泊任务.作者:姚宝明.锦州港引航站一级引航员参考文献1龚雪根等编.船舶操纵.北京:人民交通出版社,2005年.2吴兆麟等编.船舶避碰与值班.大连:大连海事大学出版社,2000年.3刘贵亮.船舶操纵中拖轮的运用.航海技术.2008年第2期.4熊振南.翁跃宗,张寿桂等.超大型船舶靠离泊操纵中拖轮助操的应用.集美大学(自然科学版),2009年第3期.5胡云平.船舶操纵中各种制动效果的比较.中国航海.2007年第3 期.6王涛.拖轮协助大型船舶操纵.天津航海.2004年第1期.7蒋才富.利用杠杆原理巧用拖轮助操.航海技术.2006年第5期.^一£:£f£一f一,c£f一£c,,f'E,_,,',,c,E,"两会"代表/委员关注海员群体2011年"两会"上,来自交通水运系统的代表,委员关注海员群体.他们认为,建设一支数量多,质量高,结构合理的海员队伍.是建设海运强国的基本保证.但当前我国海员社会地位下降,劳动强度增加.福利待遇不高,职业优势淡化,导致海员转到陆地工作,阻碍海运业发展.他们呼吁:提高海员社会地位,改善海员福利待遇,保障海员权益.扩大海员外派.转摘自《中国水运报》《航海技术》2011年第3期。

靠/离泊时操船注意事项一、靠泊前搜集各方面的信息,制定完善的靠/离泊操纵计划:熟知本轮在各种装载状态下的操纵特性,以及各种操纵设备的可靠性是安全靠离码头的基本保证,这些信息有些可从船舶资料中查找,但有的却需在日常船舶操纵中通过观测积累而成。
通过代理和查阅有关的图书资料,获取包括港口、航道、码头的信息,泊位附近的风、流、水深的信息,以及港内和泊位附近的船舶交通信息。
根据所搜集到的信息,制定靠/离泊操纵计划,对进出港准备、港外和港内航道航行操纵、靠离泊操纵等各阶段内的船舶操纵环节做出总体安排。
二、做好靠离泊的部署,做到人员到位和设备准备到位。
三、船舶操纵事项:1、因航道两侧水深的限制,大型船舶一旦进入航道,尤其是主航道,要想驶出就很困难,几乎是不可能,所以大型船舶进入航道前要特别谨慎,切不可盲目进入。
大型船舶在进入航道前应注意:(1) 航道是否清爽。
进入航道前应向VTS中心报告,得到允许后方可进入。
(2) 航道水深。
潮水潮高要满足船舶在航道上行驶,龙骨以下留有一定的富余水深。
注意水深变浅对船舶操纵性能的影响:①对操纵性有较明显影响,并达到易发现程度的水深则应以水深/吃水<1.5来界定。
②船体下沉、首倾增加,但船舶具有较大初始纵倾驶于浅水域时,船舶未必首倾,只不过是首吃水增加量大于尾吃水增加量,特别是船舶驶入H/d<1.2的水域时,若船舶预先有0.3L%的初始尾倾,则不会自然形成平吃水状态;反而会因保持并增加尾倾状态而造成尾触底的危险;③船速下降,船尾伴流增强将出现较深水更为明显的船体振动;④大型船舶在浅水中的冲程比深水中略有减少,还会产生较大的偏航距,因此,在浅水中航行应警惕因紧急倒车极可能使船舶存在偏离深水航道而造成搁浅的危险;⑤由于船体在浅水的阻力增加,船舶旋回性变差,船舶的旋回初径和进距相应增加,而航向稳定性变好。
(3 ) 泊位情况。
泊位有否它船靠泊,泊位的水深、长度是否满足本船的需要,掉头区域的大小。
强吹拢风单拖轮协助靠泊的操纵2009年11月5日内容提要:强吹拢风条件下单拖轮协助靠泊,是驾引人员必然会遇到的题目。
笔者以多年的引航工作经验,针对强吹拢风条件下单拖轮协助靠泊的操纵方法进行探讨,并提出不同阶段的操纵注意事项。
关键词:强吹拢风靠泊单拖轮协助注意事项船舶在航行中经常会遇到大风等恶劣天气,给船舶靠、离泊操纵带来困难,尤其是强吹拢风条件下的靠泊,使得靠泊风险陡然增加。
此时如有两艘拖轮协助靠泊,当然能使靠泊风险大大降低,但问题是拖轮的紧缺或强吹拢风的突发性,临时申请拖轮变得很困难。
本文以笔者多年的引航工作经验,针对强吹拢风条件下单拖轮协助靠泊的方法做一探讨,并提出注意事项,希望能给同仁带来帮助。
1船遇正横吹拢风时风压力的估算以一菲律宾籍船舶“Cherokee Princess”轮(以下简称C轮)为例,该船为空载杂货船,船长164.33m,吃水5.5m.平均干舷高度为8.7m,计划初落水时靠泊。
假设该船受正横吹拢风时,风对该船产生的风压力:Fa=1/2×ra×Ca(Aacos2θ+Basin2θ)×V2a×10-3式中:Fa为风压力;ra为空气密度(0.125kg·sec2/m4);Ca为风力系数,结合装载状态和风舷角取1.1;θ为相对风舷角,θ取最大值90°;Va为相对风速m/s;Aa为水线以上船体正面投影面积m2;Ba为水线以上船体侧面投影面积m2;Ba=164.33×8.7×1.6=2287.4736m2(1.6是水线以上船体侧面面积系数)。
那么:Fa=112×0.125×1.1×2287.4736×ya2×10-3Fa0.157V2a(t)相对风速取6级风的上限13m/s,则:Fa0.157V2a26.58(t)根据每100匹马力全回转拖轮所能提供的拖力为1.5t。
船舶操纵与避碰真题三()1. 能见度不良的水域中,一从事旁拖作业的拖轮船舶在航,应以不超过2min的间隔鸣放:①对水移动时一长声;②不对水移动时两长声;③对水移动时一长声接两短声,不对水移动时两长声接两短声;④无论是否对水移动均为一长声接两短声A.①②B.③C.①③D.④2. 船舶在分道通航水域端部附近行驶时应特别谨慎,其原因有:①、在此区域会遇时,直航船解除保向保速的义务②、端部附近船舶可能进行较大幅度的转向③、航线与通航分道交叉的船舶为避免穿越通航分道,可能在此区域通过A.①B.①、②C.②、③D.①、②、③3.互见中,两艘限于吃水的船舶相遇构成碰撞危险,则:A.两船互为让路船B.两船负有同等的避让责任和义务C.根据两船的会遇局面确定两船间的避让责任和义务D.两船互不应妨碍4. IMO船舶操纵性衡准指标包括下列哪些内容A.旋回性、航向稳定性、抑制偏转性、追随性和停船性能B.旋回性、初始回转性、抑制偏转性、保向性和停船性能C.旋回性、初始回转性、航向稳定性、保向性和停船性能D.旋回性、航向稳定性、抑制偏转性、保向性和停船性能5. 本船在能见度不良的水域航行,仅凭雷达发现左正横前来船方位不变并构成碰撞危险,已知本船位于来船右正横前,两船若采取转向避碰措施,下列说法正确的是:①本船只能向右转向②来船不应向左转向③本船不应向右转向④本船可以向左转向A.①②B.③④C.②③D.②④6.关于渔区以及渔区内渔船捕鱼作业特点,下列说法正确的是:①渔船使用的VHF 的频率与商船所使用的VHF的频率不同;②渔船的渔具伸出方向和长度难以确定;③除了《规则》规定的号灯号型之外,渔船不应当显示其他的号灯号型;④渔区内的渔船避碰行动不受《规则》约束A.①②B.①③④C.①②③D.②③④7.在海面平静的情况下应尽快释放救生艇或救助艇抢救落水人员,放艇时大船的余速不应超过______。
kn kn kn kn8.下列哪些局面中存在让路船和直航船①、显示两个尖端对接圆锥体号型的甲船互见中追越显示一个菱形体号型的乙船;②、垂直显示两个球体的甲船在互见中追越垂直显示球、菱形体和球三个号型的乙船;③、显示两个尖端对接圆锥体号型的甲船与显示尖端向下圆锥体号型的乙船互见中航向相反相互驶近构成碰撞危险。
大型船舶进出港安全操纵作者:陆朝勇来源:《中国水运》2021年第03期摘要:随着航运经济的快速发展,码头吞吐量逐年增加,大型船舶的通航安全问题应引起高度重视。
为保障大型船舶航行和靠离泊安全,本文以金润码头为例,介绍进出港航道和码头水域及该区域的潮汐潮流,提出安全地进出港和靠离泊方法及安全要素控制,确保船舶航行和靠离泊安全。
关键词:码头;进出港;安全操纵中图分类号:U675.98 文献标识码:A 文章编号:1006—7973(2021)03-0115-02近年来船舶趋向大型化发展,且进出港船舶的数量和通航密度也呈逐渐增加的趋势。
通航环境日渐繁忙和复杂,这给水上交通安全带来诸多的通航风险。
因此,总结安全地进出港和靠离泊方法及注意事项,具有十分重要的作用。
本文以金润码头为例,凝练技术要点,确保船舶航行和靠离泊安全。
1港区基本情况舟山市金润码头属于宁波舟山港南部六横港区,码头位于六横岛西北涨起岸段,界于大外湾至北岐山之间。
靠泊金润码头船舶通常经虾峙门航道进港。
进港航道分为三段,总航程约18.8n miles。
如图1所示。
六横港区的潮汐属非正规半日潮,属中低潮差区,平均潮差2.37m;该码头前沿及掉头区域以往复流为主,潮流流向主要为南北向,涨潮主流集中在NNE(11.26°~33.75°)向,实测码头前沿涨潮流流速最大为0.9m/s,流向17°。
落潮流主流集中于S~SSW(168.75°~213.75°)向,实测码头前沿最大落潮流流速为1.04m/s,流向200°,码头走向与涨落流方向夹角较小,且自港池向码头方向流速有减小趋势。
急涨和急落一般发生在高、低潮前后0.5~1.5h,实测最大流速均出现在低潮位附近,码头前沿急落流流速较大,水深较浅,应避免靠离泊作业。
转流发生在中潮位附近,尽管流速较小,但流向变化较大,所以也应避免在中潮位前后0.5h内进行靠泊作业。
集化的局面。
在拖轮的灵活操纵性和马力方面也面临着更严格的要求。
所以全回转拖轮就被作为最受广泛运用的首要选择。
本文对拖轮的使用方法,如何简单易行地进行各项操作,做出了分析和探讨。
关键词:码头 拖轮 码头靠离 操纵1.引言目前对于港口的开放力度目前加大,进出港的船舶的数量也越来越多,船舶的吨位也越来越高,对于港口的各项服务也提出了更多的要求,拖轮的简单易行、可靠、安全的操作方式,就变得尤为重要。
同时伴随而来的问题就是大型化和高速化发展的船舶行业,以及不断增加的港口船舶密度,造成事故的几率也越来越高,这也要求操作拖轮时有着更高的技术能力。
2.拖轮特点(1)定义与特点拖轮可在原地360度范围内,螺旋浆能够自由地旋转,不仅施回圈小,而且转向灵活。
只需12秒左右就能通过180度地调节螺旋桨的方向,实现和完成进车改倒车的操作,并在较短的时间内完成和实现停船。
在缓慢流速而无船速的情况下,靠离泊的操作通过船舶横向移动会起到非常大的作用,而且通过调整桨叶的角度实现倒车将比进车更为灵活和方便。
(2)推进器Z型推进器是因舵机输出轴、推力轴和螺旋桨轴之前形成了一个Z字形结构而得名。
该类型推进器可以将推力应用到各个方向,采用无舵叶的,在同个水平面上从垂直方向自由地转运螺旋桨和导流管,并且360度地进行运动。
船舶可以执行后退、前进、顶推、横移、原地回转和倒拖等操作,只需要通过调整螺旋桨角度和转速,以及排出流的流向来进行控制。
3.操作方法(1)大型船舶的操作协助大型船舶离靠泊是拖轮重要的日常工作之一。
在作业前,需要对大船船型、吃水等基本情况及作业泊位附近风向、风力、潮汐等进行掌握;大船在靠泊的时候,由引水员或是大船船长进行指挥,一般会提前进行减速操作,拖轮在接近大船时,禁止横越大船船首,避免碰撞事故的发生;贴靠大船前,要对大船的船型、弧度大小做出充分的估计,不能与本船的驾驶台、桅杆等上层建筑发生碰撞,贴靠时需根据大船的导缆孔位置,将两船的速度调整一致,并保持一定的横距,频繁运用小舵角,使船舶进行横向移动,以此来靠近大船;在即将靠上时,本船船头的推力和船尾的吸力会使拖轮船首外偏,两船接触时的反作用力也会使两船离开,这时候应该向大船侧压稍大一些舵角来克服船头外偏;需要注意的是,当大船首尾弧度较大,平贴可能发生大船船体与拖轮上层建筑碰撞时,拖轮应选择大船船体相对平直区域先靠近,再对缆孔位置进行调整,如位置出现不合适的情况,必须向引水员或是大船船长立即提出更改;当协助集装箱船舶时,由于集装箱船舶船体弧度较大,采取平贴方式,可能会造成拖轮的上层建筑与大船碰撞,这时需要控制好拖轮与大船之间的相对速度和位置,采取伴航的形式进行带缆,待缆绳带好后,调整船位至安全的部位顶靠。
1超大型船舶的操纵性随着船舶大型化的趋势,到秦皇岛港超大型船舶的比例在持续增加,对引航员的操纵技能提出了越来越高的要求。
由于超大型船舶质量大、惯性大,与一般船舶相比有其不同的操纵特点:(1)航向稳定性差。
考虑到内海及沿海水深限制,超大型船舶的吃水一般不会同比增加,但船宽和船长增加明显,尤其是船宽,即方型系数大,所谓肥大型船舶,对船舶的操纵性影响较大。
超大型船舶航向稳定性差,停船性能差。
空载时受风的影响较大,满载时受流的影响较大。
港内操纵中,控制超大型船舶的船首向和船速,包括加减速、制动、旋回、横向运动等许多任务需要靠拖轮协助才能完成。
除非特殊情况,尽量不使用本身倒车,因为慢速驶近泊位时,频繁用倒车容易使船首偏转加剧,无法摆正船位,使操纵更加困难。
航向稳定性差,旋回滞距较大,维持舵效就需要较高的速度,一般船舶为2kn,超大型船舶为3~4kn;停车冲程一般船舶为8~23L,超大型船舶为23L;倒车冲程万吨级为6~8L,超大型船舶为13~16L。
这就在操纵上存在一对矛盾,超大型船舶为维持舵效需要较高的余速,但它的惯性大、冲程大,重载靠泊时不易控制。
(2)应舵性差。
在港内短时用车提高船速的目的主要是为提高舵速。
舵速=船速-舵处的伴流速度+螺旋桨排出流速度。
所以在航道内停车淌航,船速降低后,突然加大主机转速是提高舵效的有效途径,既能控制余速,又能提高舵效。
另外还应特别注意紧急情况下操舵旋回舵效的迟钝性,也就是说,从下达舵令至应舵时间内,需要前冲一段距离才开始旋回。
这主要与舵面积比有关。
超大型船舶的舵面积比较小,在1/65~1/80,而一般船舶约在1/60以上。
因此,在操纵超大型船舶时,就应充分考虑到这种惯性大、舵效迟钝、制动马力小的特征。
在允许的情况下,在船尾安排一艘拖轮减速是解决上述矛盾的好方法。
(3)超大型船舶的每排水量分配的主机功率较小。
3~4万吨级船舶其主机功率约为1万匹,但排水量增大8倍多的20多万吨的船,主机功率才增加2倍多。
拖轮在协助靠离泊操作中的运用作者:孙永泽来源:《中国水运》2020年第11期摘要:船舶的日益大型化,使拖轮的协助变得越来越常态化。
通过拖轮协助操作的深入探讨,使船舶靠离泊作业变得更加安全、高效。
关键词:拖轮协助;靠离泊码头中图分类号:U675 文献标识码:A 文章编号:1006—7973(2020)11-0119-02纵观拖轮的发展历程,从单车、单舵的FPP型到CPP型,再到后来360度旋转推进的VSP型和ZP型,最終以综合性能占优的ZP型拖轮在我国各大港口得到广泛的应用。
为了保证靠离泊操作的安全性与高效性,拖轮的深入运用成为每个驾引人员的必修课。
下面根据不同的靠离泊情况对拖轮的协助操作进行分类探讨。
1单拖轮协助离泊时以常见的单拖轮拖首离泊为例,如图1所示。
图中,G为被协助船船舶重心,P为被协助船船舶转心,C为拖轮作用点。
GP与GC的关系可表示为:GP≈(0.35L)2/GC。
由公式可知:当C点在G点附近时,P点在船尾的无穷远处,船舶只有横移而无旋转。
要使船舶旋转,就应使C点尽量远离G点。
计算可知当CG=1/6L,即C点距离船头位置约1/3L 时,GP=1/2L即转心P点正好在船尾。
所以当C点在距离船头位置1/3L-1/2L时,转心P点在船尾和船尾方向的延长线上,在离泊过程中船舶上任一点的横移方向是远离码头的,能够保证船舶的安全离泊。
在实际的单拖轮首离泊操作中,除了拖轮作用点位置的正确应用,驾引人员还应根据当时风、流情况,适时地合理运用被协助船的车舵来保证船尾与码头的安全距离。
控制好转头速率是安全离泊的关键,过快的转头速率会导致拖轮无法保持拖力方向始终与被协助船保持垂直,而产生船舶首尾方向的分力,导致被协助船发生前冲或后缩的现象。
2双拖轮协助离泊时常规操作中,驾引人员会先使被协助船舶横移出安全的横距后,再进行首离泊操作。
但有的泊位区域受限,需直接采用首离法,如图2所示。
T1 为首拖力,A为作用点;T2为尾拖力,B为作用点;T合为合力,C为合力作用点。
第14卷 第3期集美大学学报(自然科学版)Vol .14 No .3 2009年7月Journal of J i m ei University (Natural Science )Jul .2009 [收稿日期]2008-06-30 [修回日期]2008-11-10[作者简介]熊振南(1965—),男,副教授,从事航海技术研究.[文章编号]1007-7405(2009)03-0260-05超大型船舶靠离泊操纵中拖轮助操的应用熊振南,翁跃宗,张寿桂(集美大学航海学院,福建厦门361021)[摘要]在码头工程通航环境安全评估的专题研究中,应用日本MMG 分离建模方法,建立超大型船舶操纵运动的仿真模型;根据超大型船舶操纵运动的特性,给出了超大型船舶靠离泊操纵中所需拖轮数量、配备要求和具体的助操方法.在此基础上,运用大型船舶操纵模拟器,对3×105t 级超大型油轮靠离泊操纵中拖轮的应用进行了仿真试验,仿真结果为超大型船舶在靠离泊过程中拖轮的协调应用提供了科学依据.[关键词]超大型船舶;靠离泊操纵;拖轮助操;船舶操纵模拟器[中图分类号]U 661133[文献标志码]A0 引言在超大型船舶靠离泊过程中,由于码头前沿水域平面条件和水深条件的限制以及超大型船舶载质量大、吃水深、尺度大、惯性大、冲程大,受风流的影响大、运动状态不易控制等特点,使得超大型船舶在靠离泊操纵时必须配备足够数量或功率的拖轮协助船舶操纵,并且操作方法必须合理有效,以确保码头以及超大型船舶靠离泊操纵的安全.但是,目前国内各港口对于超大型船舶拖轮的配备和协调联系方法没有统一的规定,各自都是按照自己的习惯做法配备和联系拖轮.本文结合“天津港南一泊位3×105t 级油轮减载通航安全模拟试验”课题项目,运用大型船舶操纵模拟器对超大型船舶靠离泊操纵作业中拖轮的配备数量和功率进行了分析,并且对驾引人员和拖轮的联系方法等问题进行了探讨.1 船舶操纵数学模型船舶运动数学模型是船舶操纵模拟器的核心部分,也直接关系到仿真结果的可信度.在描述船舶操纵运动时,一般取图1所示的两种平面直角坐标系,即空间固定坐标系X 0O Y 0和随船运动坐标系xGy (G 为船舶重心).在图1中,X,Y 为作用于船体上的外力,N 为作用于船体上的外力矩;u,v 分别为船舶运动的速度分量,r为船舶运动的转首角速度;φ为航向角;δ为舵角;u a 、v a 分别为绝对风速和相对风速;φa ,αa 分别为绝对风弦角和相对风舷角;u c 、φc 分别为流速角和流向角;β为漂角.本数学模型主要考虑船舶的平面运动,忽略船舶横摇、纵摇及垂荡对操纵运动的影响.并假设船舶的操纵运动是准定常的,认为水动力与频率无关,不考虑波浪 第3期熊振南,等:超大型船舶靠离泊操纵中拖轮助操的应用的影响,水的自由表面作刚性壁处理,采用下列操纵运动方程式:(m +m x ) u -(m +m y )vr =X P +X R +X A +X H +X O ,(m +m y ) v +(m +m x )u r =X P +X R +X A +X H +X O ,(I zz +J zz ) r =N H -X G Y H +N P +N R +N A +N O ,2π(I PP +J PP ) n =Q E +Q P +Q F ,T E δ+δ=δE ,(1)其中:m 为船舶质量;m x 和m y 为X 向、Y 向船体附连质量;I zz 为船体自身绕Z 轴的转动惯性矩,J zz 为附加惯性矩;I PP 、J PP 分为桨及轴系的转动惯性矩和附加惯性矩;Q E 为主机发出的转矩;Q P 为螺旋桨消耗的转矩;Q F 为轴系摩擦消耗的转矩;δE 为命令舵角;T E 为舵机时间常数;X G 为船重心坐标,在船中前为正,船中后为负.式(1)中各量下标含义为:H 表示船体;P 为螺旋桨;R 表示舵;A 为风;O 为船体.对于舵机,通常还有δ≤35°, δ≤3°/s 的限制.由于模型试验求取船体的水动力导数是取船中心作为坐标原点的,所以式(1)将把对船中的力矩转换为对船重心的力矩.按照作用在船体上各水动力的不同属性,船舶操纵运动模型可以由船体水动力模型、外界水动力模型、操纵设备力模型及其他力学模型组成[1].2 超大型船舶靠离泊操纵拖轮助操的应用211 超大型船舶靠离泊操纵所需拖轮的总功率港作拖轮所需的总功率,可以根据进出港船舶的载质量吨位按下列经验公式计算:BHP =kQ,式中:BHP —所需港作拖船总功率(k W );Q —进出港设计船型的载质量吨(t );k —系数.当D W T (Dead W eight T onnage,载质量吨)≤20000t 时,k 取01075;当20000t <DW T ≤50000t 时,k 取01060;当D W T >50000t 时,k 取01050.为控制3×105t 油船,需要拖轮的总功率为:BHP =01050×300000=15000(k W ).212 超大型船舶靠离泊操纵拖轮数量的估算表1 拖船功率与拖力换算Ta b .1 Co nve rsi o n o f tug πs pow e r a nd f o rce 类型进车/k N 倒车/k N CPP 型17.69.50VSP 型12.711.20Z 型20.018.20船舶匀速横向靠泊过程中拖船推力的总和等于风动力与水动力的总和,港作拖船的推力(或拖力)与拖船的类型有关,拖船每100k W 功率发出的拖力如表1所示.船舶横向移动的水动力和风动力的估算公式为:Y w =1/2ρw L dv 2y ,Y a =73.6×10-5A y v 2a ξ,C w y =6.06-2.8H /d,(2)其中:Y w 为水动力;Y a 为风动力;C w y 为船舶横向移动水动力系数;ρw 为水的密度;L 为船长;v y 为船舶横移速度;A y 为船体水面以上横向受风面积;ξ为风压不均匀折减系数和相对风速;v a 为相对风速;d 为船舶吃水;H 为水深.按文献[2]的标准,大型船舶横向入泊速度不可超过0110m /s,按文献[3]的标准,1×105t 船舶横向入泊速度有掩护泊位时为0106~0108m /s,开敞式泊位时为0108~0115m /s .风压不均匀折减系数一般取1,油船的满、压载船体水面以上横向受风面积可按下式估算[3]:lg A y =0.485+0.5741lg DW ,lg A y =0.618+0.621lg DW ,(3)其中:DW (Dead W eight )为油船总载质量;A y 为控制3×105t 油船在风流中的横移.按Z 型推进器拖船计算所需的拖船功率见表2.・162・集美大学学报(自然科学版)第14卷表2 Z 型拖船功率估算表Tab.2 Pow e r e s ti m a te o f Z 2tug 风级风动力/N 流速/kn 水动力/N 拖轮功率/k W 61056.200.5119.995765.724285.950.227.641537.27238.880.227.64326.13213 超大型船舶靠离泊操纵拖轮助操的应用3×105t 级船舶惯性大,船舶操纵性能相对较差,因而拖轮的运用方式就十分重要,而且对于引航员来说,较好地同时控制5艘以上拖轮的作业也是新的课题.港内拖轮作业常用方法有吊拖、顶推2种.1)吊拖引航员根据港口码头前沿水域平面、水文气象和水深等条件,在使用拖轮协助大型船舶操纵时,一般由拖轮出缆系于大型船舶缆桩上进行助操.考虑到拖轮的有效拖力和操纵灵活性,一般拖缆的水平俯角不超过15°,即拖缆长度应大于被拖船拖缆出口至水面高度的4倍,如果该高度很低,拖缆长度也不应小于45m ,一般取拖轮长的2倍左右,但还需视实际操纵水域来确定.吊拖助操方式在港内作业使用较多,主要是协助大型船舶离泊.具体操作方法如图2所示.有时大型船舶进靠速度过快时,为发挥出拖轮的最大有效拖力,也采用这种方式减缓进靠速度,甚至把大型船舶拉停,重新调整进泊角度和船位.有时因水域限制,协助大型船舶掉头时也采用拖首顶尾或拖尾顶首的方式.有时,由于水域限制和过往船只过多,出缆长度无法达到上述要求时,只能采用带缆后拖轮紧贴大船船身拖拽的助操方法.吊拖具有能减少两船间的水阻力,充分发挥拖船的牵引力,可使用于长距离拖带和港内作业等优点.但其缺点是:若被拖船无动力,则很难准确控制停船;船队较长,往往在河道上影响其他船舶的航行;被拖船容易发生左右偏荡.2)顶推顶推方式主要是在拖轮助操时拖轮力作用点位置及方向处于经常变换的情况下使用.带缆方式有单首缆、双首缆和紧绑3种.港内拖船作业时一般都是由拖轮从船艏出单缆,顶推助操一般是靠泊时采用.两条拖轮时采用分别顶首顶尾的方法,带上缆绳主要是为了有利于在进泊过快时控制进靠速度,摆好船位和调整进靠角度.操作方法如图3所示.顶推不但可使大型船舶横移,还可使大型船舶转向,顶推位置离重心远时,大型船舶转动最为明显.除靠泊外,该法也适用于江河水上运输.把拖船的船头用缆索或专用装置系固于船驳的船尾来推动船驳前进,其航速较吊拖法提高10%~20%.3)驾驶人员与拖轮的联系驾引人员指令的下达与拖轮执行情况是否到位,直接关系到靠离泊的安全.尤其是在控制4艘以上拖轮助操的时候,驾引人员与拖轮之间需要密切配合.建议在助操过程中统一口令,以12点钟的・262・ 第3期熊振南,等:超大型船舶靠离泊操纵中拖轮助操的应用方向控制拖轮的顶推与吊拖的方向.以船舶首尾方向为0点和6点;正横方向为3点和9点.方向统一后易于下达口令控制拖轮在12点钟方向内顶推或吊拖船舶(如图4所示).3 应用实例受天津港石油化工码头公司委托,集美大学航海学院课题组运用大型船舶操纵模拟器进行了“天津港南一泊位3×105t 级油轮减载通航安全模拟试验”的专题研究工作.其研究成果可作为天津港南一泊位3×105t 级油轮减载通航安全模拟试验码头工程和航道规划工程的依据.同时,该研究有助于当地海事主管机关、码头经营人对码头水域的通航安全有较全面的了解,为在该水域实施海上交通安全管理提供决策支持,规范航行秩序,确保船舶航行和码头营运的安全.课题组对3×105t 油轮靠离泊拖轮应用进行分析.模拟试验船型为VLCC (Very Large Crude Carrier,超大型油轮),排水量33583815m 3,船舶长度334m,船舶宽度58m,船舶满载吃水2016m,方型系数C b 为01850.模拟试验海区风、流设定如下,试验风速取值:极限风速6级(1515m /s ),风向045°和225°;试验潮流流速取极大值,即急涨潮流速115kn,流向281°,急落潮流速115kn,流向101°.在3位天津港高级引航员的亲自操纵和指导下共完成10次船舶顺靠作业(涨落流速115kn 、风力5~6级),其航迹分布如图5所示.试验表明,本工程3×105t 级油轮减载进港,入东突堤航速控制在5~6kn,在船尾适时带上3600k W 拖轮,和左右各2艘3600k W 拖轮(如图2所示),在距离泊位1n m ile 处利用船尾3600k W 拖轮制动,可以在南四泊位处将船舶余速控制在2kn 以内,但船尾拖轮的制动将占用较大的水域,根据模拟试验,建议南二泊位应保持清爽,不得停靠他船.若进东突堤船舶余速控制不力,或船舶受顺风、顺流的影响前冲速度过快,可以利用船尾左右两艘拖轮一起制动,以保证船舶和码头的安全.4 结论港口持续稳定的发展是沿海地区经济繁荣的基本保证.当前,各沿海城市的港口建设规模正日益扩大,新建了许多大型船舶靠泊码头,本文根据超大型船舶操纵运动的特性,给出了超大型船舶靠离泊操纵中所需拖轮数量、配备要求和具体的助操作方法.在此基础上,运用大型船舶操纵模拟器,根据码头所在地理位置、水文气象条件,利用拖轮协助操纵,对3×105t 级超大型油轮靠离泊操纵中拖轮应用进行多次实时动态仿真试验,并在对仿真试验的结果进行优化分析的基础上,得出所需的可行性方案,该方案对船长、引航员实际操船具有参考价值,为港口建设和超大型船舶的靠离泊问题的解决提供了科学的依据.・362・集美大学学报(自然科学版)第14卷[参考文献][1]史国友.船舶操纵安全综合评价系统[D ].大连:大连海事大学航海学院,1996.[2]日本海难防止协会.超大型船操船手引[M ].[出版地不详]:成山堂书店,1972.[3]中华人民共和国交通部.JTJ215-98 港口工程载荷规范[S].北京:人民交通出版社,1998.Appli ca ti on of Tug 2a ssisti n g i n Super 2si zed Sh i p πs Berth i n g and Unberth i n gX IONG Zhen 2nan,W ENG Yue 2z ong,ZHANG Shou 2gui(Navigati on I nstitute,J i m ei University,Xiamen 361021,China )Abstract:A mathe matical model of the super 2sized shi p maneuvering was set up based on the separate model building method of MMG and app lied t o the study of navigating safety evaluati on at harbor .The tug nu mber,required equi pment and assisting method were given for the super 2sized shi p πs berthing and un 2berthing,according t o its handling characteristic .Based on the above,the tug assisting method in berthing and unberthing si m ulati on test on the crude carrier of 3×105t was i m p le mented on shi p handling si m ulat or p latfor m.The results may p r ovide a scientific f oundati on f or tug unis onous assisting in the super 2sized shi p πs berthing and unberthing .Key words:super 2sized shi p;berthing and unberthing;tug 2assisting;shi p handling si m ulat or(责任编辑 陈 敏)・462・。