带降维观测器的状态反馈系统
- 格式:doc
- 大小:107.00 KB
- 文档页数:6

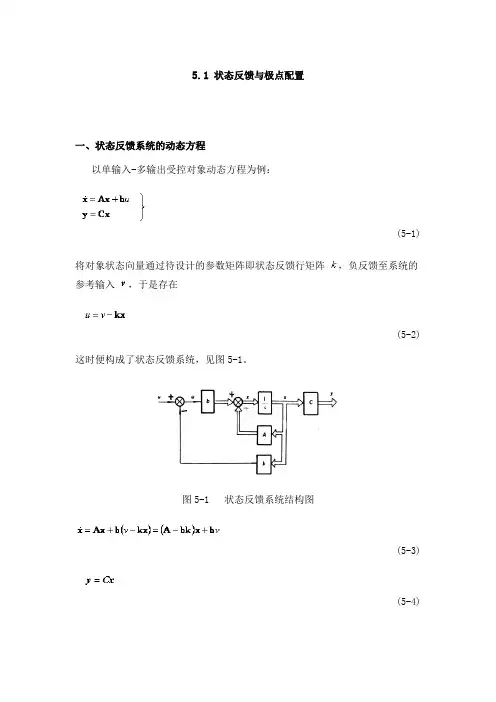
5.1状态反馈与极点配置一、状态反馈系统的动态方程以单输入-多输出受控对象动态方程为例:(5-1)将对象状态向量通过待设计的参数矩阵即状态反馈行矩阵,负反馈至系统的参考输入,于是存在(5-2)这时便构成了状态反馈系统,见图5-1。
图5-1 状态反馈系统结构图(5-3)(5-4)式中v为纯量,为维向量,为维矩阵,为维向量,为维行矩阵,为维向量,为维矩阵。
为闭环状态阵,为闭环特征多项式。
二、用状态反馈使闭环极点配置在任意位置上的充要条件是:受控对象能控证明若式(5-1)所示对象可控,定可通过变换化为能控标准形,有若在变换后的状态空间内引维状态反馈矩阵:(5-5)其中分别为由状态变量引出的反馈系数,则变换后的状态反馈系统动态方程为:(5-6)(5-7)式中(5-8)该式与仍为能控标准形,故引入状态反馈后,系统能控性不变。
特征方程为:(5-9)显见,任意选择阵的个元素,可使特征方程的个系数满足规定要求,能保证特征值(即闭环极点)任意配置。
将逆变换代入式(5-6),可求出原状态空间内的状态反馈系统状态方程:(5-10)与式(5-3)相比,式(5-10)所示对象应引入状态反馈阵为:(5-11)需指出,当受控对象可控时,若不具有能控标准形形式,并不必象如上证明那样去化为能控标准形,只要直接计算状态反馈系统闭环特征多项式,这时,其系数为的函数,与给定极点的特征多项式系数相比较,便可确定。
能控的多输入-多输出系统,经如上类似分析可知,实现闭环极点任意配置的状态反馈阵K为维。
若受控对象不稳定,只要有能控性,完全可由状态反馈配置极点使系统稳定。
状态变量受控情况下,引入状态反馈表示增加一条反馈通路,它能改变反馈所包围环节的传递特性,即通过改变局部回路的极点来改变闭环极点配置。
不能控状态变量与控制量无关,即使引入状态反馈,对闭环极点位置也不会产生任何影响,这是因为传递函数只与系统能控、能观测部分有关的缘故。
若不能控状态变量是稳定的状态变量,那么系统还是能稳定的,否则,系统不稳定。
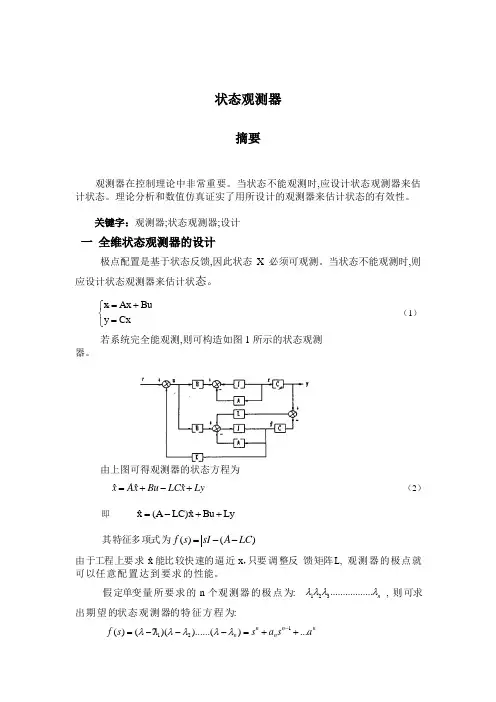
状态观测器摘要观测器在控制理论中非常重要。
当状态不能观测时,应设计状态观测器来估计状态。
理论分析和数值仿真证实了用所设计的观测器来估计状态的有效性。
关键字:观测器;状态观测器;设计一 全维状态观测器的设计极点配置是基于状态反馈,因此状态X 必须可观测。
当状态不能观测时,则应设计状态观测器来估计状态。
x A x B u y C x =+⎧⎨=⎩(1) 若系统完全能观测,则可构造如图1所示的状态观测器。
由上图可得观测器的状态方程为ˆˆˆxA xB u LC x L y =+-+ (2) 即 ˆˆ x (A L C )x B u L y =-++ 其特征多项式为()()f s sI A L C =--由于工程上要求ˆ x能比较快速的逼近 x ,只要调整反 馈矩阵 L, 观测器的极点就可以 任意配置达到要求的性能。
假定单变量所要求的 n 个 观测器的极点为:123.................n λλλλ , 则可求出期望的状态观测器的特征方程为:112()( n n nn n f s s a s a λλλλλλ-=---=++这时可求得反馈矩阵 L 为:10()...1o o L f A V -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ (3) 式中1...o n C C A V C A -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦是将系统期望的观测器特征方程中 S 换成系统矩阵 A后的矩阵多项式。
利用对偶原则, 可使设计问题大为简化, 求解过程如下:( 1)构造系统式( 1)的对偶系统T TT z A z C B z ηω⎧=+⎪⎨=⎪⎩ (4) ( 2)用MATLAB 的函数 p l ace ( )及 acker ( ), 根据下式可求得状态观测器的反馈矩阵Lk e r(,,)T T T L a c A C P =或(,,)T T TL p la c e A C P = (5) 其中, P 为给定的极点, L 为状态观测器的反馈矩阵。
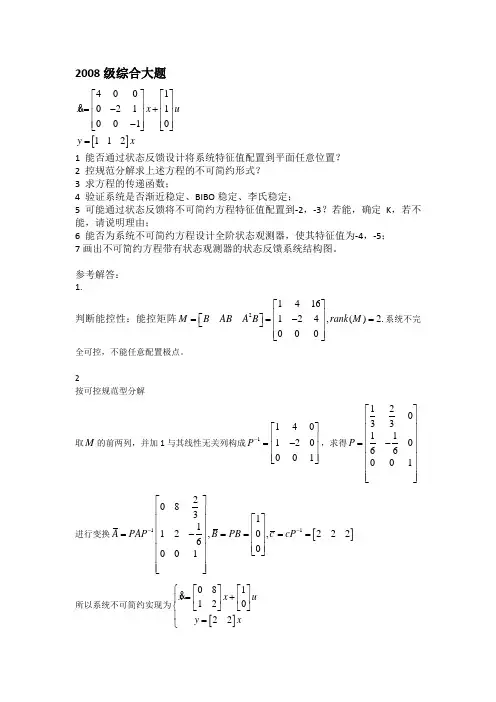
2008级综合大题[]400102110010112x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=1 能否通过状态反馈设计将系统特征值配置到平面任意位置?2 控规范分解求上述方程的不可简约形式?3 求方程的传递函数;4 验证系统是否渐近稳定、BIBO 稳定、李氏稳定;5 可能通过状态反馈将不可简约方程特征值配置到-2,-3?若能,确定K ,若不能,请说明理由;6 能否为系统不可简约方程设计全阶状态观测器,使其特征值为-4,-5; 7画出不可简约方程带有状态观测器的状态反馈系统结构图。
参考解答: 1.判断能控性:能控矩阵21416124,() 2.000M BABA B rank M ⎡⎤⎢⎥⎡⎤==-=⎣⎦⎢⎥⎢⎥⎣⎦系统不完全可控,不能任意配置极点。
2按可控规范型分解取M 的前两列,并加1与其线性无关列构成1140120001P -⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦,求得1203311066001P ⎡⎤⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦进行变换[]1120831112,0,22260001A PAP B PB c cP --⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥=-====⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦ 所以系统不可简约实现为[]08112022x x u y x ⎧⎡⎤⎡⎤=+⎪⎢⎥⎢⎥⎨⎣⎦⎣⎦⎪=⎩3.12(1)(1)2(1)()()(4)(2)(1)(4)(2)s s s G s c sI A B s s s s s --+-=-==-++-+ 4.det()(4)(2)(1)sI A s s s -=-++,系统有一极点4,位于复平面的右部,故不是渐近稳定。
12(1)()()(4)(2)s G s c sI A B s s --=-=-+,极点为4,-2,存在位于右半平面的极点,故系统不是BIBO 稳定。
系统发散,不是李氏稳定。
5.可以。
令11228,12Tk k k k A Bk k +⎡⎤⎡⎤=+=⎢⎥⎢⎥⎣⎦⎣⎦则特征方程[]2112()det ()(2)28f s sI A Bk s k s k k =-+=-++--期望特征方程*2()(2)(3)56f s s s s s =++=++比较上两式求得:728Tk -⎡⎤=⎢⎥-⎣⎦6.可以。

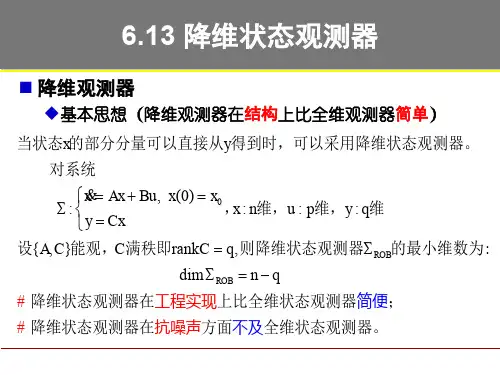
线性系统理论的实验作业:1.找一个3阶单输入单输出系统;2.设计降维观测器(极点自己选);3.设计带降维观测器的状态反馈系统;4.讨论降维观测器极点配置和状态反馈极点的关系;5.画出状态变量及观测误差曲线。
一.给定系统u x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=011131413121211444x .[]x y 111=1.设计一个降维观测器使其极点为-3,-4.2.设计带观测器的状态反馈系统,使其极点为-1+j2,-1. 3.讨论降维观测器的极点和状态反馈极点的关系。
4.画出状态变量及观测误差随时间变化的曲线。
解:(1)构造坐标变换矩阵。
P=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡100010111L C [] 100010111 2 11Q Q Q P =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--==-用线性变换PX =x —将系统变换成∑⎪⎪⎭⎫⎝⎛C BA ___,其中 []001C 010 01131111106 =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----==-B P PA A 对于本例而言,降维观测器的的维数为n-p=2降维观测器期望特征多项式为127)4)(3()(f 2++=++=λλλλλ。
引入反馈阵⎥⎥⎦⎤⎢⎢⎣⎡=g gG 21__—得到降维观测器的特征多项式为g g 21211-1g --++λλ)(—比较两个多项式得:6g2 51-=-=g 可以得到降维观测方程:y6-5- 2u01-y 5460 6-16-1- ^^.^^⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=ωωωx 。
(为可以测量的,因为这里的的观测值或者是估计值为x1x2 2^x )执行以下的m 文件 >> A11=6;A22=[-1,-1;1,0]; A12=[0,-1]; A21=[-11;-13]; B1=0; B2=[-1;0]; V=[-3,-4];G=(acker(A22',A12',V))' Ahat=A22-L*A12Bhat=Ahat*G+A21-G*A11 Fhat=B2-G*B1 G =-5 -6Ahat =-1 -6 1 -6Bhat =60 54Fhat =-1 0因此降解观测器的增益矩阵G=⎥⎦⎤⎢⎣⎡--65,具有期望极点的降阶观测器为 y6-5- 2u01-y 5460 6-16-1- ^^.^^⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=ωωωx 。
状态反馈与状态观测器实验状态反馈与状态观测器一、实验目的1.自学全系列状态意见反馈布局极点的方法。
2.自学降维状态观测器的设计方法。
3.学习带有状态观测器的状态反馈系统的设计方法。
二、实验仪器1.el-at-ii型自动控制系统实验箱一台2.计算机一台三、实验建议1.1)用全状态反馈配置极点的方法,按给定的性能指标进行综合设计。
2)检验极点布局理论的正确性。
2.设计一个带有状态观测器的状态反馈系统。
四、实验前分析排序和设计已知被控系统如图所示:u10.05s+1x210.1sx1y图5-1被控系统结构图1、设计一个全状态反馈系统,闭环系统性能要求为ξ=0.707,ts≤0.2s.设计k阵,并图画出来尖萼电路图挑选适当元件参数。
2、假设x2不能直接测量,设计一个降维状态观测器将x2进行估计得到估计值,然后用2形成全系列状态意见反馈,并使闭环系统ξ=0.707,ts≤0.2s,并图画出来尖萼电路图挑选x1和x独以适当元件参数。
100k50k1uf1ufda1100k25k2-out650k2-out63100k+3+x2100k2-out6x1ad131k100k0-6out+321k0+1k100k01k0图5-2状态反馈系统演示电路图图5-3带有状态观测器的状态反馈系统模拟电路图五、实验步骤1.连接被测量典型环节的模拟电路。
电路的输入u1接a/d、d/a卡的da1输出,电路的输入u2接a/d、d/a卡的ad1输出。
检查有误后拨打电源。
2.启动计算机,在桌面双击图标[自动控制实验系统]运转软件。
3.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
4.在实验课题下拉菜单中挑选实验二[二阶系统阶跃积极响应],具有状态观测器的状态反馈系统挑选实验五[状态意见反馈与状态观测器],鼠标单击该选项弹头出来实验课题参数窗口。
5.观测表明的波形记录最小市场汇率量mp和调节时间ts的数值和积极响应动态曲线,并与理论值比较。
线性系统理论的实验作业:
1.找一个3阶单输入单输出系统;
2.设计降维观测器(极点自己选);
3.设计带降维观测器的状态反馈系统;
4.讨论降维观测器极点配置和状态反馈极点的关系;
5.画出状态变量及观测误差曲线。
一.给定系统
u x ⎥⎥
⎥⎦
⎤
⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=011131413121211444x .
[]x y 111=
1.设计一个降维观测器使其极点为-3,-4.
2.设计带观测器的状态反馈系统,使其极点为-1+
j2,-1. 3.讨论降维观测器的极点和状态反馈极点的关系。
4.画出状态变量及观测误差随时间变化的曲线。
解:(1)构造坐标变换矩阵。
P=⎥
⎥⎥⎦
⎤⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡100010111L C [] 100010111 2 1
1Q Q Q P =⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡--==-
用线性变换PX =x —
将系统变换成∑⎪⎪⎭
⎫
⎝
⎛C B
A _
_
_
,其中 []001C 010 01131111106 =⎥⎥⎥⎦
⎤
⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----==-B P PA A 对于本例而言,降维观测器的的维数为n-p=2
降维观测器期望特征多项式为
127)4)(3()(f 2
++=++=λλλλλ。
引入反馈阵⎥⎥⎦
⎤
⎢⎢⎣
⎡=g g
G 21_
_
—
得到降维观测器的特征多项式为g g 212
11-1g --++λλ)(—
比较两个多项式得:6g2 51-=-=g 可以得到降维观测方程:
y
6-5- 2u
01-y 5460 6-16-1- ^^.
^^⎥⎦
⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=ωωωx 。
(为可以测量的,因为这里的的观测值或者是估计值为x1
x2 2^
x )
执行以下的m 文件 >> A11=6;
A22=[-1,-1;1,0]; A12=[0,-1]; A21=[-11;-13]; B1=0; B2=[-1;0]; V=[-3,-4];
G=(acker(A22',A12',V))' Ahat=A22-L*A12
Bhat=Ahat*G+A21-G*A11 Fhat=B2-G*B1 G =
-5 -6
Ahat =
-1 -6 1 -6
Bhat =
60 54
Fhat =
-1 0
因此降解观测器的增益矩阵G=⎥⎦
⎤
⎢
⎣⎡--65,具有期望极点的降阶观测器为 y
6-5- 2u
01-y 5460 6-16-1- ^^.
^^⎥⎦
⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=ωωωx 。
(2)设计带此降维观测器的状态反馈系统
由传递函数知道系统能控且能观,因此存在状态反馈和状态观测器,根据分离特性可以分别进行设计,观测器已经设计完毕,现在来求状态反馈阵K ,令K=
[]321k k k 得到闭环系统矩阵为A+BK=⎥⎥
⎥⎦
⎤⎢⎢⎢⎣⎡------+++13141331221211134241
4k k k k k k 以及闭环
特征
多项式
f (λ)
=36213184)153268()512(1
2
3
k k k k k k k k -+--++-+--+λλλ 与期望特征多项式比较:k1=-1305,k2=-1286,k3=-1099.
执行如下m 文件:
A=[4,4,4;-11,-12,-12;13,14,13]; B=[1;-1;0]; C=[1,1,1];
J=[-1+j*2,-1-j*2,-1]; K=acker(A,B,J)
其解果如下截图: K =
187 179 140 (加个负号与我们计算值相等)
(3)讨论降维观测器极点和状态反馈极点的关系,二者独立,相互分离。
答:设状态估计误差为
,引入等效变换:
,
令变换矩阵为
经线性变换后的系统
为:
或者展开为:
由于线性变换不改变系统的极点,因此有:
式子表明:由观测器构成状态反馈的闭环系统,其特征多项式等于矩阵(A+BK)与矩阵(A-HC)的特征多项式的乘积,即闭环系统的极点等于直接状态反馈(A+BK)的极点和状态观测期(A-HC)的极点的总合,而且二者独立,相互分离。
(4) 状态变量及观测误差随时间变化的曲线
执行以下m文件可确定基于观测器的控制器传递函数(系统整体闭环传递函数) A=[4,4,4;-11,-12,-12;13,14,13];
B=[1;-1;0];
A11=6;
A22=[-1,-1;1,0];
A12=[0,-1];
A21=[-11;-13];
B1=0;
B2=[-1;0];
Ka=187;Kb=[179,140];
G=[-5;-6];
Ahat=A22-G*A12
Bhat=Ahat*G+A21-G*A11
Fhat=B2-G*B1
Atilde=Ahat-Fhat*Kb;
Btilde=Bhat-Fhat*(Ka+Kb*G);
Ctilde=-Kb;
Dtilde=-(Ka+Kb*G);
[num,den]=ss2tf(Atilde,Btilde,-Ctilde,-Dtilde)
f=tf(num,den)
执行结果如下图所示:
num =
1.0e+003 *
-1.5480 7.4640 3.8280
den =
1 -17
2 -1202
Transfer function:
-1548 s^2 + 7464 s + 3828 ------------------------- s^2 - 172 s – 1202
因此控制系统的闭环传递函数为1202
-172s -s^23828
7464s s^2 -1548 x c ++=)(G
已知闭环系统的初始条件为
=状态变量的初值,及观测误差的初值,三路状态变量,两路状态误差
基于闭环系统模型,编写并执行以下程序 A=[4,4,4;-11,-12,-12;13,14,13]; B=[1;-1;0];
K=[187,179,140]; Kb=[179,140]; G=[-5;-6];
A22=[-1,-1;1,0]; A12=[0,-1];
AA=[A-B*K,B*Kb;zeros(2,3),A22-G*A12]; sys=ss(AA,eye(5),eye(5),eye(5)); t=[0:0.01:8];
x=initial(sys,[1;0;0;1;0],t); x1=[1,0,0,0,0]*x'; x2=[0,1,0,0,0]*x'; x3=[0,0,1,0,0]*x'; e1=[0,0,0,1,0]*x'; e2=[0,0,0,0,1]*x';
subplot(321)
plot(t,x1)
grid on
ylabel('x1')
subplot(322)
plot(t,x2)
grid on
ylabel('x2')
subplot(323)
plot(t,x3)
grid on
ylabel('x3')
subplot(324);
plot(t,e1)
grid on
xlabel('t(sec)')
ylabel('e1')
subplot(325)
plot(t,e2)
grid on
xlabel('t(sec)');
ylabel('e2');
程序执行后所产生的的闭环系统的响应曲线如下。