主机遥控系统故障分析与模拟仿真
- 格式:pdf
- 大小:155.21 KB
- 文档页数:2
Auto Chief O Ⅳ主机遥控系统调试故障分析与处理查辅江(江苏海事职业技术学院,江苏南京210011)提 要 Auto Chief O Ⅳ主机遥控系统,安装调试难度大、发生故障多,本文介绍调试过程出现的一些常见故障,以及对这些故障的分析与处理。
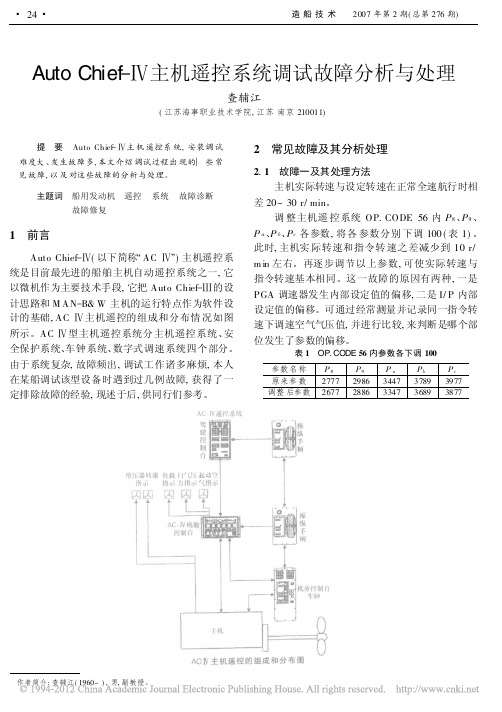
主题词 船用发动机 遥控 系统 故障诊断故障修复1 前言Auto Chief O Ⅳ(以下简称/AC Ⅳ0)主机遥控系统是目前最先进的船舶主机自动遥控系统之一,它以微机作为主要技术手段,它把Auto Chief O Ⅲ的设计思路和M AN O B&W 主机的运行特点作为软件设计的基础,AC Ⅳ主机遥控的组成和分布情况如图所示。
AC Ⅳ型主机遥控系统分主机遥控系统、安全保护系统、车钟系统、数字式调速系统四个部分。
由于系统复杂,故障频出,调试工作诸多麻烦,本人在某船调试该型设备时遇到过几例故障,获得了一定排除故障的经验,现述于后,供同行们参考。
2 常见故障及其分析处理2.1 故障一及其处理方法主机实际转速与设定转速在正常全速航行时相差20~30r/min 。
调整主机遥控系统OP.CODE 56内P 8、P 9、P a 、P b 、P c 各参数,将各参数分别下调100(表1)。
此时,主机实际转速和指令转速之差减少到10r/m in 左右。
再逐步调节以上参数,可使实际转速与指令转速基本相同。
这一故障的原因有两种,一是PGA 调速器发生内部设定值的偏移,二是I/P 内部设定值的偏移。
可通过经常测量并记录同一指令转速下调速空气气压值,并进行比较,来判断是哪个部位发生了参数的偏移。
表1 OP.CODE 56内参数各下调100参数名称P 8P 9P a P b P c 原来参数27772986344737893977调整后参数26772886334736893877作者简介:查辅江(1960-),男,副教授。
#24# 造船技术 2007年第2期(总第276期)2.2故障二及其处理方法主机突然失控,转速达164r/min主机遥控、集控室等对其均不起作用。

控制系统模拟仿真控制系统模拟仿真是一种运用计算机技术对实际系统进行仿真、建模和分析的方法。
它可以通过模拟不同的控制算法和策略,预测系统的响应和行为。
控制系统模拟仿真在工程领域中有着广泛的应用,能够提高系统的稳定性、性能和安全性。
本文将从仿真原理、模拟建模、仿真软件以及应用案例等方面进行探讨。
一、仿真原理控制系统模拟仿真的基本原理是通过将实际系统的数学模型转化为计算机可以理解和处理的形式,使用计算机对其进行模拟和计算。
这样可以预测实际系统在不同条件下的动态行为和响应,为系统的设计和优化提供依据。
1. 数学建模在控制系统仿真中,首先需要对实际系统进行数学建模。
这包括建立系统的各个组成部分的方程和关系,如动力学方程、控制算法等。
通过数学建模,可以描述系统的行为和特性,为仿真提供基础。
2. 运算和计算利用计算机对模型进行仿真时,需要进行相应的数值计算和运算。
根据系统的数学模型,通过数值方法对模型进行离散化和求解,得到模拟结果。
其中,常用的数值方法包括欧拉法、龙格-库塔法等。
3. 参数调节和优化通过对仿真结果的观察和分析,可以对系统的参数进行调节和优化。
根据系统的性能指标和设计要求,通过改变参数的数值,可以改善系统的性能和响应。
二、模拟建模模拟建模是控制系统仿真的关键步骤之一。
在建立模型时,需要考虑系统的结构和性能要求,选择适当的建模方法和技术。
1. 系统结构建模对于复杂的控制系统,可以采用层次化的建模方法。
将整个系统分解为若干个子系统、部件或模块,分别进行建模。
这样可以降低建模的难度和复杂度,提高仿真的效率和准确性。
2. 物理建模与网络建模根据系统的物理特性和网络结构,选择合适的建模方法。
物理建模主要是基于物理方程和物理变量进行建模,而网络建模则关注于系统的拓扑结构和网络通信。
3. 离散事件建模和连续时间建模针对不同类型的系统,可以选择离散事件建模或连续时间建模方法。
离散事件建模主要适用于具有离散状态和离散事件的系统,而连续时间建模适用于连续变量和状态的系统。
船舶柴油主机遥控系统虚拟仿真软件功能介绍与使用说明书单位:大连海事大学船舶电气工程学院联系人:***联系方式:134****7961电子邮箱:*****************.cn目录一、软件介绍 (1)1.1软件简介 (1)1.2软件组成 (2)二、软件功能 (3)2.1模拟柴油机备车、起动、停止、换向等功能 (3)2.2模拟操作部位切换功能 (4)2.3应急操作功能 (4)2.4含船舶柴油机数字调速器功能模块 (5)2.5含气动逻辑单元操纵和气路控制功能模块 (7)2.6含柴油机运行三维显示功能模块 (8)2.7具有报警功能 (8)2.8含主机安全保护控制功能模块 (8)2.9支持远程网络控制功能 (9)2.10支持多终端实时操作硬件的功能 (9)2.11支持硬件数据采集的功能 (9)三、软件界面 (10)3.1登录界面 (10)3.2主界面 (10)3.3驾驶台界面 (11)3.4集控室界面 (13)3.5集控车钟界面 (14)3.6安保系统界面 (16)3.7警报界面 (19)3.8调速器界面 (20)3.9机旁控制界面 (21)3.10气动操纵界面 (24)3.11状态曲线界面 (25)3.12主机模型界面 (26)四、软件使用说明 (27)4.1登录的操作 (27)4.2操作部件的使用 (28)4.2.1车钟的操作 (28)4.2.2阀门的操作 (29)4.2.3手柄的操作 (29)4.2.4其他元器件的操作 (30)五、操作实训参考试题 (32)5.1题目——主机备车操作 (32)5.2题目——主机操纵位置切换操作(驾驶台切换到集控室) (32)5.3题目——驾驶台遥控操作(主机启停) (33)5.4题目——集控室遥控操作(主机启停) (33)5.5题目——机旁应急操作(主机启停) (34)5.6题目——紧急停车操作 (34)5.7题目——设置轮机长最大转速限制 (35)5.8题目——故障排除 (35)5.9题目——设置故障以及安全保护系统的使用 (35)一、软件介绍1.1软件简介大连海事大学自动化专业是辽宁省普通高等学校一流本科教育示范专业,辽宁省本科工程人才培养模式改革试点专业,辽宁省普通高等学校创新创业教育试点专业,依托专业建设的自动化实验教学中心为辽宁省本科实验教学示范中心。

业务交流丨浅谈主机遥控系统的故障分析主机遥控系统是有关船舶主机操纵的重要组成部分,搞懂其工作原理以及保持其良好的工作性能,才能在发生故障时能迅速地判断出故障部位,进行修理。
以下通过某轮一典型故障分析查找解决以及最近在校学习培训浅谈以下自己对主机遥控系统的维护保养与故障排除的一点认识和总结,不足之处还请各位同仁指正。
某轮准备离港,驾驶台通知值班轮员主机备车,随后主机冲车,并让驾驶台正倒车试验,但是在驾控操车时,主机第一次起动失败,接着主机遥控系统按程序自动进行第二、第三次起动,仍然起动失败,遥控控制面板和机舱集中监视都发出声光报警。
警报复位并电告驾驶台,让驾驶台的车钟放到停车位置,再次起动主机还是失败,将主机操纵方式转到机舱集控室操纵,集控室操纵正常。
由于驾控不正常,集控室控制正常,分析遥控气动图,我们首先怀疑的是84号和85号阀,因为当主机遥控系统在驾控位置,且主机是停车状态时,84号阀停车电磁阀有电,工作位置在左位,控制空气经84、85号阀作用至气控阀38,使38号阀工作在下位,此时另一路控制空气经38号阀和23号阀作用于气控阀25,使25号阀工作在下位,因此控制空气可以经25号阀和128号阀到达主机高压油泵顶部作用于击穿阀(PUNCTURE VALVE),使高压油泵停止向气缸喷油,主机从而停止运转。
当驾控操纵主机时,启动至供油区时,停车电磁阀84号阀应失电工作在右块,作用于气控阀38号阀的控制空气得以经85号阀和84号阀放入大气,使38号阀工作在上位,因此作用于气控阀25的控制空气可以经23号阀和38号阀放入大气,使25号阀工作在上位,同样作用于主机高压油泵顶部的击穿阀(PUNCTURE VALVE)的控制空气可以经128号阀和25号阀放入大气,驾控状态下可能对遥控系统起作用(起动时主机从正车换向至倒车,正常)的就是84号阀和85号阀。
(点击查看大图)所以我们对84号和85号阀进行拆检,电磁线圈检查测量。

⽡锡兰电喷机主机遥控故障分析⽡锡兰电喷机主机遥控故障分析⼀、故障现象在去澳⼤利亚主机驾控正常航⾏中,主机突然主起动空⽓压⼒报警,电脑警报显⽰SENS FAIL(电脑主机界⾯显⽰压⼒46bar,实际只有26bar)。
随后驾驶台及集控室车钟报警,操车控制⾯板上的车钟对应转速波动,驾控和机控车钟操车失效,随后⼿动停车,操车控制⾯板显⽰车钟对应值均显⽰“?”,电脑报警显⽰的也是SENS FAIL.。
驾驶台与机控室车钟传令、主机安保功能、⼿动操车系统检查均正常,随即集控室⼿动操车继续航⾏。
⼆、处理过程根据故障反馈的情况看认为有如下可能性:AEM402模块问题,⾃动电站转为⼿动,将AEM402模块和报警箱对换⼀下试试。
对换前⼀定记录各⾃模块上的跳线位置,更换后按原来要求⼀⼀设定。
根据建议,船舶再次将监测控制系统与主机操作系统中的AEM402模块带电操作对换试验。
1.监测系统的模块装到主机操作系统2个⼩时后,主机操作系统警报消除,参数显⽰正常,分别在集控室和驾驶台车钟对主机进⾏正倒车试验均正常,驾控操作正常。
2.主机操作系统的模块装到监测控制系统后,警报⽆法消除,关联的参数值显⽰混乱。
3.船上没有备⽤AEM402模块,由于监测系统的AEM402模块缺失,将直接影响到NO.1付机的功率及频率监控,与之关联的MXM402模块上的各油舱油柜温度也⽆法正常显⽰。
三、原因分析及注意事项AEM402(A4001)主机遥控PLC模拟量输⼊模块,输⼊量有主起动空⽓压⼒传感器,驾驶台和机控室操车电位器,由于该模块硬件本⾝故障,致使驾驶台和机控室遥控失控,只能机控室⼿动操作,需要换新模块。
如果船上没有该模块,为了主机系统能够正常操作,可寻找信号采集箱中的同型号模块来替代。
林索PLC更换模块,⼚家要求断电更换,更换之后系统重新加载参数到新更换的硬件上,⼤约10分钟左右整套PLC启动完成。
⼚家提醒⽡锡兰电喷机主机,不断电⼦调速器电源,在机控室⼿动操车情况下,主机不会停机。
《基于PLC的轮机模拟器主机遥控系统的设计与实现分析》摘要:基于此,本文将轮机模拟器的主机遥控系统为研究对象,从设计要求、硬件、软件三方面入手,分析基于PLC的轮机模拟器主机遥控系统的设计与实现方法,为轮机模拟器的有效应用提供帮助,文献标识码:A 文章编号:1006-4311(2020)11-0262-02,轮机模拟器的主机遥控系统设计阶段,首先必然是提高控制系统的控制精度,PLC控制系统本身具有较高的精度控制水平,然而考虑到轮机系统的复杂性和高安全运行要求性,要建成PLC控制系统的定制化系统,其可以广泛收集当前的设备运行信息和可获取的反馈性信息,代入到控制系统之中后,系统的数据分析结构找到目前的运行缺陷,并把该信息上传给遥控系统,并根据实际运行状态发出遥控新号,同时发出的遥控新号也要具备高响应性,需要考虑对信号的分析效率和分析精确度,防止发出的控制指令无法被控制系统接收曾洛军摘要:在轮机模拟器中,主机遥控系统的应用可提高船员操作动力设备的能力,保障船舶的正常运行,避免海上交通事故的出现。
基于此,本文将轮机模拟器的主机遥控系统为研究对象,从设计要求、硬件、软件三方面入手,分析基于PLC的轮机模拟器主机遥控系统的设计与实现方法,为轮机模拟器的有效应用提供帮助。
Abstract: In the marine engine simulator, the application of the host remote control system can improve the crew"s ability to operate power equipment, ensure the normal operation of the ship and avoid the occurrence of marine traffic accidents. Based on this, this paper takes the host remote control system of the marine engine simulator as the research object, and analyzes the design and implementation methods of the PLC-based host remote control system of the marine engine simulator from the aspects of design requirements, hardware and software, to provide help for the effective application of the marine engine simulator.关键词:PLC;轮机模拟器;主机遥控系统Key words: PLC;marine engine simulator;host remote control system中图分类号:U664.82 文献标识码:A 文章编号:1006-4311(2020)11-0262-020 引言主机遥控系统是实现船舶自动化的关键,可为船舶的无人值班机舱落实提供技术支持。
现代的船舶基本上都已经实现了现代化,船舶的主机系统也实现了高科技,而且发展较快,在其主机系统发展的历程最早是气动式的控制系统,再到电动式发展,如今已经发展为电子集成气动式,甚至很多船舶已经使用了微机气动式的控制系统。
主机遥控系统是现代化船舶的核心技术,此系统是微机控制的,集控室等于主机之间的信号交流,系统控制的内容多且繁杂,其逻辑关系是人脑所不能理清楚的。
正是因为控制系统的复杂性,一旦船舶的主机发生了故障,一时间很难找到故障部位。
而主机系统出现了故障,将会使主机不能正常启动,进而威胁到船舶的正常运行。
船舶轮机管理人员只有掌握了各种现代化的科学技术和原理,能对船舶主机遥控系统有全面的专业知识,才能比较快速,准确的做出分析与判断,并且找到故障原因。
船舶现代化的发展,要求能够快速准确的找出船舶主机遥控系统的故障原因。
一、船舶主机遥控系统概述主机遥控是指远离机旁在驾驶台( 或集控室)通过自动控制装置对船舶柴油机主机进行操纵。
如同所有的控制系统一样,主机遥控系统是由控制器和控制对象( 主机 )二部份组成的。
控制器的任务在于不断地采集来自驾驶台的操纵命令和来自主机的运行状态信息,做出判断,自动地根据系统的控制要求,向被控对象发出控制信号,以达到控制目标。
随着船舶自动化技术的发展, 装设主机遥控系统的船舶逐年增多。
比较完善的主机遥控系统通常设有如下功能(或环节):(1)逻辑程序控制,它包括操纵转换位置判断、自动换向、自动起动、重复起动、重起动、制动的逻辑控制;(2)转速与负荷控制,它包括转速信号发送速率限制和负荷程序等;(3)安全保护与应急操作;(4)系统功能模拟试验;(5)系统故障自检等。
组成自动控制系统的元件有气动、机械、液压、继电器----接触器、半导体分立元件、小规模集成电路等不同种类, 在技术发展的不同阶段,主机遥控系统的类型随采用的控制元件不同也有气动式、电动式、电-气式、电-液式等不同。
随着微型计算机在控制领域的广泛应用, 自上世纪八十年代远洋船舶主机遥控系统普遍采用了微型机做为控制器的核心,使系统的设计、生产、使用和维修都更为简单, 可靠性也大大提高。