simulink动态系统建模仿真_第1章
- 格式:ppt
- 大小:8.00 MB
- 文档页数:114
Simulink动态仿真仿真Simulink简介:Simulink是MATLAB的重要组成部分,提供建立系统模型、选择仿真参数和数值算法、启动仿真程序对该系统进行仿真、设置不同的输出方式来观察仿真结果等功能。
1、启动方法:单击图标或在窗口输入simulink在启动Simulink模块库浏览器后再单击其工具栏中的New model 命令按钮,会弹出名字为untitled的模型编辑窗口。
在MATLAB主菜单中,选择File菜单中New菜单项的Model命令,也可打开模型编辑窗口。
利用模型编辑窗口,可以通过鼠标的拖放操作创建一个模型。
2、Simulink的退出为了退出Simulink,只要关闭所有模型编辑窗口和Simulink模块库浏览器窗口即可。
3、Simulink的基本模块4、掌握模块的编辑:添加,选取,复制删除。
5、掌握模块的连接举例:建立系统仿真x1=x2*tX2=x2*e(-0.5*t)操作步骤1) 在MATLAB主菜单中,选择File菜单中New菜单项的Model命令,打开一个模型编辑窗口。
(2) 将所需模块添加到模型中。
(3) 设置模块参数并连接各个模块组成仿真模型。
设置模块参数后,用连线将各个模块连接起来组成系统仿真模型。
模型建好后,从模型编辑窗口的File 菜单中选择Save 或Save as 命令将它存盘。
举例2:使用simlink 仿真下列曲线,取w=2*pix(wt)=sin(wt)+1/3*sin(3wt)+1/5*sin(5wt)+1/7*sin(7wt)+1/9*sin(9wt) 步骤:(1) 启动Simulink 并打开模型编辑窗口。
(2) 将所需模块添加到模型中。
(3) 设置模块参数并连接各个模块组成仿真模型。
设置模块参数后,用连线将各个模块连接起来组成仿真模型。
(4) 设置系统仿真参数。
(5) 开始系统仿真。
(6) 观察仿真结果。
作业:完成相关习题:1、使用simlink 仿真下列曲线,取w=2*pix(wt)=1/3*sin(5*wt)+ sin(wt)+sin(1/8*wt)2、使用simlink 仿真i=⎰+10)1ln(*dx x x。



如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
目录第一章Simulink基础知识 (2)1.1 仿真运行相关问题 (2)1.2 输出仿真数据 (3)1.3 配置参数 (3)1.4 输出仿真数据诊断仿真错误 (5)1.5 输出仿真数据分析仿真结果 (6)第二章Communication Blockset应用 (7)2.1 Communication Blockset的模块库的功能介绍 (7)2.2 通信系统建模 (9)2.2.1 运行一个Simulink 模型 (9)2.2.2 搭建一个简单模型 (13)2.3 基础通信系统建模 (19)2.3.1 模拟调制系统建模 (19)2.3.2 搭建信道噪声模型 (22)2.3.3 搭建汉明码模型 (24)2.3.4 搭建模拟调制信道 (27)2.3.5 搭建循环码模型 (29)2.3.6 搭建数字调制模型 (29)2.3.7 用眼图、散点图看已调信号 (31)2.3.8 发送数据到MATLAB工作空间 (35)2.3.9 从MATLAB工作空间输入数据 (37)第一章Simulink基础知识Simulink 是一个用于建模、仿真、分析动态系统的软件包。
它支持线性和非线性系统,也可以是多速率系统,也就是该系统有着不同采样速率的部分组成。
它也是一种基于模块的设计工具。
Simulink的特点在于:•Simulink 鼓励你去尝试任何事,你可以很容易地用草图来搭建模块,也可对现有的模型进行添加来搭建一个新模型,你可以看到仿真结果的图形,也可通过MA TLAB中的所有分析工具来分析结果。
•Simulink的目的是通过鼓励你提出一个问题,模拟它,然后看发生了什么这么一种过程让你觉得建模和仿真是一件有趣的事。
•Simulink也很实用,全世界成千上百的工程师正用它来模拟和解决实际问题,对这个工具的了解将对你的整个职业生涯都很有帮助。
1.1 仿真运行相关问题当仿真正在运行时,你可以交互地完成以下操作:1.修改一些配置参数,包括仿真停止时间和最大仿真步长2.用浮动示波器或显示模块来观察连线上传输的信号3.修改模块参数,只要不改变以下参数♦状态变量,输入,输出的个数♦采样时间♦过零点数♦任何模块参数的向量长度♦外部模块工作向量的长度在仿真过程中,你不可以改变模型结构如:添加删除连线或模块,除非你停止目前的仿真。
simulink建模及动态仿真的一些实验步骤Simulink是MATLAB中的一种可视化仿真工具,可以用于动态系统建模、仿真和分析。
以下是一些Simulink建模及动态仿真的实验步骤:启动Simulink:首先,需要打开MATLAB,然后在MATLAB 的命令窗口中输入“simulink”命令,或者点击工具栏中的Simulink 图标来启动Simulink。
新建模型:在Simulink的启动界面中,可以选择“Blank Model”来新建一个空白的模型。
也可以选择其他预设的模型模板来开始建模。
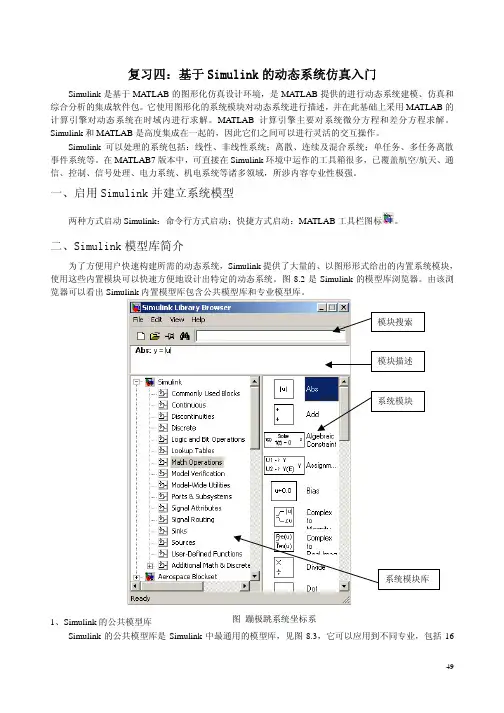
构建系统模型:在新建的模型窗口中,可以通过从Simulink 的模块库中拖拽模块到模型窗口中来构建系统模型。
模块库中包含了各种类型的模块,如源模块、接收模块、处理模块等。
将这些模块按照系统的结构和功能连接起来,形成一个完整的系统模型。
设置模块参数:对于模型中的每个模块,都可以双击打开其参数设置对话框,设置其参数和初始条件。
这些参数和初始条件将决定模块在仿真中的行为。
设置仿真参数:在模型窗口的工具栏中,可以点击“Simulation”->“Model Configuration Parameters”来打开仿真参数设置对话框。
在这个对话框中,可以设置仿真的起始和结束时间、仿真步长、求解器类型等参数。
开始仿真:完成以上步骤后,可以点击模型窗口工具栏中的“Run”按钮来开始仿真。
在仿真过程中,可以实时观察模型中各个模块的状态和输出。
分析结果:仿真结束后,可以使用Simulink提供的各种分析工具来分析仿真结果。
例如,可以使用示波器模块来显示仿真过程中某个模块的输出波形,也可以使用MATLAB的工作空间来查看和处理仿真数据。
以上步骤是一个基本的Simulink建模和动态仿真的过程。
在实际使用中,可能还需要根据具体的需求和系统特点进行一些额外的设置和调整。