2简谐振动的合成
- 格式:doc
- 大小:102.50 KB
- 文档页数:2
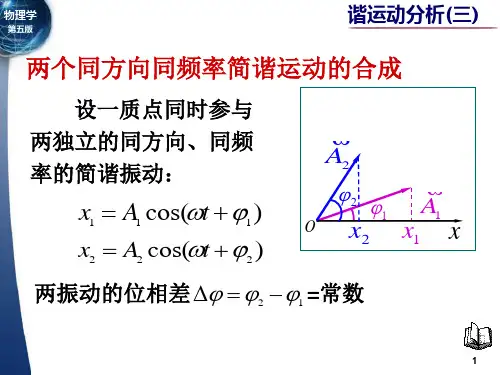
第4章 机械振动4.1基本要求1.掌握描述简谐振动的振幅、周期、频率、相位和初相位的物理意义及之间的相互关系2.掌握描述简谐振动的解析法、旋转矢量法和图线表示法,并会用于简谐振动规律的讨论和分析3.掌握简谐振动的基本特征,能建立一维简谐振动的微分方程,能根据给定的初始条件写出一维简谐振动的运动方程,并理解其物理意义4.理解同方向、同频率简谐振动的合成规律,了解拍和相互垂直简谐振动合成的特点4.2基本概念1.简谐振动 离开平衡位置的位移按余弦函数(或正弦函数)规律随时间变化的运动称为简谐振动。
简谐振动的运动方程 cos()x A t ωϕ=+2.振幅A 作简谐振动的物体的最大位置坐标的绝对值。
3.周期T 作简谐振动的物体完成一次全振动所需的时间。
4.频率ν 单位时间内完成的振动次数,周期与频率互为倒数,即1T ν=5.圆频率ω 作简谐振动的物体在2π秒内完成振动的次数,它与频率的关系为22Tπωπν==6.相位和初相位 简谐振动的运动方程中t ωϕ+项称为相位,它决定着作简谐振动的物体状态;t=0时的相位称为初相位ϕ7.简谐振动的能量 作简谐振动的系统具有动能和势能。
弹性势能222p 11cos ()22E kx kA t ωϕ==+ 动能[]22222k 111sin()sin ()222E m m A t m A t ωωϕωωϕ==-+=+v弹簧振子系统的机械能为222k p 1122E E E m A kA ω=+==8.阻尼振动 振动系统因受阻尼力作用,振幅不断减小。
9.受迫振动 系统在周期性外力作用下的振动。
周期性外力称为驱动力。
10.共振 驱动力的角频率为某一值时,受迫振动的振幅达到极大值的现象。
4.3基本规律1.一个孤立的简谐振动系统的能量是守恒的物体做简谐振动时,其动能和势能都随时间做周期性变化,位移最大时,势能达到最大值,动能为零;物体通过平衡位置时,势能为零,动能达到最大值,但其总机械能却保持不变,且机械能与振幅的平方成正比。
第4章 机械振动4.1基本要求1.掌握描述简谐振动的振幅、周期、频率、相位和初相位的物理意义及之间的相互关系2.掌握描述简谐振动的解析法、旋转矢量法和图线表示法,并会用于简谐振动规律的讨论和分析3.掌握简谐振动的基本特征,能建立一维简谐振动的微分方程,能根据给定的初始条件写出一维简谐振动的运动方程,并理解其物理意义4.理解同方向、同频率简谐振动的合成规律,了解拍和相互垂直简谐振动合成的特点4.2基本概念1.简谐振动 离开平衡位置的位移按余弦函数(或正弦函数)规律随时间变化的运动称为简谐振动。
简谐振动的运动方程 cos()x A t ωϕ=+2.振幅A 作简谐振动的物体的最大位置坐标的绝对值。
3.周期T 作简谐振动的物体完成一次全振动所需的时间。
4.频率ν 单位时间内完成的振动次数,周期与频率互为倒数,即1T ν=5.圆频率ω 作简谐振动的物体在2π秒内完成振动的次数,它与频率的关系为22Tπωπν== 6.相位和初相位 简谐振动的运动方程中t ωϕ+项称为相位,它决定着作简谐振动的物体状态;t=0时的相位称为初相位ϕ7.简谐振动的能量 作简谐振动的系统具有动能和势能。
弹性势能222p 11cos ()22E kx kA t ωϕ==+ 动能[]22222k 111sin()sin ()222E m m A t m A t ωωϕωωϕ==-+=+v弹簧振子系统的机械能为222k p 1122E E E m A kA ω=+== 8.阻尼振动 振动系统因受阻尼力作用,振幅不断减小。
9.受迫振动 系统在周期性外力作用下的振动。
周期性外力称为驱动力。
10.共振 驱动力的角频率为某一值时,受迫振动的振幅达到极大值的现象。
4.3基本规律1.一个孤立的简谐振动系统的能量是守恒的物体做简谐振动时,其动能和势能都随时间做周期性变化,位移最大时,势能达到最大值,动能为零;物体通过平衡位置时,势能为零,动能达到最大值,但其总机械能却保持不变,且机械能与振幅的平方成正比。

简谐振动的合成实验一、实验目的1.掌握谐振动的表达与合振动的分析2.掌握信号的相位、幅度、频率等参数的物理含义3.掌握用示波器观察波形以及测量电压、周期和频率的方法。
4.掌握使用信号发生器。
5.利用李萨茹图分析待测信号的相位频率等信息二、实验仪器Waveace1012型数字示波器1台、DG4062型数字信号发生器一台、传输线2条等。
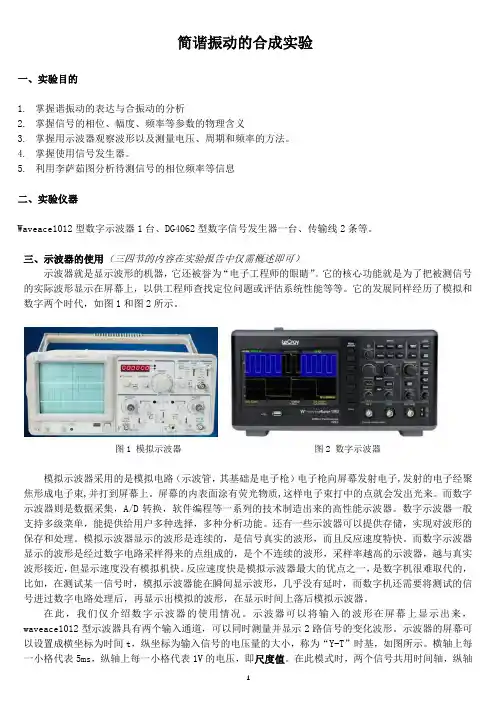
三、示波器的使用(三四节的内容在实验报告中仅需概述即可)示波器就是显示波形的机器,它还被誉为“电子工程师的眼睛”。
它的核心功能就是为了把被测信号的实际波形显示在屏幕上,以供工程师查找定位问题或评估系统性能等等。
它的发展同样经历了模拟和数字两个时代,如图1和图2所示。
图1 模拟示波器图2 数字示波器模拟示波器采用的是模拟电路(示波管,其基础是电子枪)电子枪向屏幕发射电子,发射的电子经聚焦形成电子束,并打到屏幕上。
屏幕的内表面涂有荧光物质,这样电子束打中的点就会发出光来。
而数字示波器则是数据采集,A/D转换,软件编程等一系列的技术制造出来的高性能示波器。
数字示波器一般支持多级菜单,能提供给用户多种选择,多种分析功能。
还有一些示波器可以提供存储,实现对波形的保存和处理。
模拟示波器显示的波形是连续的,是信号真实的波形,而且反应速度特快。
而数字示波器显示的波形是经过数字电路采样得来的点组成的,是个不连续的波形,采样率越高的示波器,越与真实波形接近,但显示速度没有模拟机快。
反应速度快是模拟示波器最大的优点之一,是数字机很难取代的,比如,在测试某一信号时,模拟示波器能在瞬间显示波形,几乎没有延时,而数字机还需要将测试的信号进过数字电路处理后,再显示出模拟的波形,在显示时间上落后模拟示波器。
在此,我们仅介绍数字示波器的使用情况。
示波器可以将输入的波形在屏幕上显示出来,waveace1012型示波器具有两个输入通道,可以同时测量并显示2路信号的变化波形。
示波器的屏幕可以设置成横坐标为时间t,纵坐标为输入信号的电压量的大小,称为“Y-T”时基,如图所示。


合振幅公式推导合振幅公式是描述两个简谐振动合成后振幅大小的公式。
在推导合振幅公式时,需要使用复数和欧拉公式等数学知识。
首先,假设有两个简谐振动,其振幅分别为A1和A2,角频率分别为ω1和ω2,相位角分别为φ1和φ2。
则两个振动的位移函数可以表示为:y1 = A1sin(ω1t + φ1)y2 = A2sin(ω2t + φ2)将上式转化为复数形式,则有:y1 = A1e^(i(ω1t+φ1))y2 = A2e^(i(ω2t+φ2))其中,i为虚数单位。
由欧拉公式可得:e^(ix) = cos(x) + i sin(x)将上式带入前面两个式子中,得到:y1 = A1(cos(ω1t+φ1) + i sin(ω1t+φ1))y2 = A2(cos(ω2t+φ2) + i sin(ω2t+φ2))将上式相加,得到合振动的位移函数:y = y1 + y2= A1(cos(ω1t+φ1) + i sin(ω1t+φ1)) + A2(cos(ω2t+φ2) + i sin(ω2t+φ2))= (A1cos(ω1t+φ1) + A2cos(ω2t+φ2)) + i(A1sin(ω1t+φ1) + A2sin(ω2t+φ2))根据三角函数的和差公式,可以将上式化简为:y = Acos(ωt + φ)其中,A为合振动的振幅,ω为角频率,φ为相位角,具体表达式为:A = sqrt(A1^2 + A2^2 + 2A1A2cos(φ1-φ2))ω = (ω1 + ω2) / 2φ = arctan((A1sinφ1 + A2sinφ2) / (A1cosφ1 + A2cosφ2))因此,上述公式即为合振幅公式的推导过程及结果。
简谐振动的合成
1. 两个不同的轻质弹簧分别挂上质量相同的物体1和
2, 若它们的振幅之比A 2 /A 1=2, 周期之比T 2 / T 1=2, 则它们的总振动能量之比E 2 / E 1 是( A )
(A) 1 (B) 1/4 (C) 4/1 (D) 2/1
解:振动能量22
2
22221T
A m A m E E E p
k πω==+= 即 2
12
1
212T A m E π= 2222222T A m E π=
121222222112222
121222
2
222212
12
2
1=⎪⎭⎫ ⎝⎛⨯=⎪⎪⎭⎫ ⎝⎛⋅=⋅==∴T T A A T T A A T A m T A m E E ππ 2.有两个同方向的谐振动分别为X 1=4COS(3t+π/4)cm ,
X 2 =3COS(3t -3π/4)cm, 则合振动的振幅为A=1cm, 初周相为φ=π/4.
∵φ2-φ1=-π ∴A=|A 1-A 2|=|4-3|=1cm φ=φ1=π/4
3. 一质点同时参与两个两个同方向, 同频率的谐振动,
已知其中一个分振动的方程为X 1=4COS3t cm, 其合振动的方程为 X=4COS (3t+π/3)cm, 则另一个分振动的振幅为A 2 =4cm , 初位相φ=2π/3.
3 , 0 ,411π
ϕϕ=
===cm A A
解:根据题意作旋转矢量图
21A A A 及平行四边形中和
4. 一质点同时参与了三个简谐振动, 它们的振动方程分别为X 1=A COS(ω
t+π/3), X 2 =A COS (ωt+5π/3), X 3 =A COS(ωt+π), 其合成运动的运动方程为X=0.
解: 作旋转矢量图 已知A 1=A 2=A 3=A,
A 3 且 A A A A =+='21
A 合=0 ∴ x = 0
5. 频率为v 1和v 2的两个音叉同时振动时,可以听到拍
音,若v 1>v 2,则拍的频率是( B )
(A)v 1+v 2 (B)v 1-v 2 (C)(v 1+v 2)/2 (D)(v 1-v 2)/2
O
1
A :
形的对边组成一个正三角
m
A A A 4c 12===∴ππ
π
π
ϕϕ3
2
3
3
32=
+
=
+
=20
)(321=++=∴A A A A
合。