机器视觉工业镜头计算方法
- 格式:docx
- 大小:134.87 KB
- 文档页数:5
内参、外参、畸变参数三种参数与工业相机的标定方法与相机坐标系的理解“内参、外参、畸变参数三种参数与相机的标定方法与相机坐标系的理解1、 相机参数是三种不同的参数。
相机的内参数是六个分别为:1/dx、1/dy、r、u0、v0、f。
opencv1里的说内参数是4个其为fx、fy、u0、v0。
实际其fx=F*Sx,其中的F就是焦距上面的f,Sx是像素/没毫米即上面的dx,其是最后面图里的后两个矩阵进行先相乘,得出的,则把它看成整体,就相当于4个内参。
其是把r等于零,实际上也是六个。
dx和dy表示:x方向和y方向的一个像素分别占多少长度单位,即一个像素代表的实际物理值的大小,其是实现图像物理坐标系与像素坐标系转换的关键。
u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数。
相机的外参数是6个:三个轴的旋转参数分别为(ω、δ、 θ),然后把每个轴的3*3旋转矩阵进行组合(即先矩阵之间相乘),得到集合三个轴旋转信息的R,其大小还是3*3;T的三个轴的平移参数(Tx、Ty、Tz)。
R、T组合成成的3*4的矩阵,其是转换到标定纸坐标的关键。
其中绕X轴旋转θ,则其如图:注意:在每个视场无论我们能提取多少个角点,我们只能得到四个有用的角点信息,这四个点可以产生8个方程,6个用于求外参,这样每个视场就还赚两个方程来求内参,则其在多一个视场即可求出4个内参。
因为六个外参,这就是为什么要消耗三个点用于求外参。
畸变参数是:k1,k2,k3径向畸变系数,p1,p2是切向畸变系数。
径向畸变发生在相机坐标系转图像物理坐标系的过程中。
而切向畸变是发生在相机制作过程,其是由于感光元平面跟透镜不平行。
其如下:1.径向畸变:产生原因是光线在远离透镜中心的地方比靠近中心的地方更加弯曲径向畸变主要包含桶形畸变和枕形畸变两种。
下面两幅图是这两种畸变的示意:它们在真实照片中是这样的:2.切向畸变:产生的原因透镜不完全平行于图像平面,这种现象发生于成像仪被粘贴在摄像机的时候。

工业镜头相关参数工业镜头是一种用于工业应用的专用光学镜头,广泛应用于机器视觉系统、工业自动化设备、医疗设备等领域。
在选择和使用工业镜头时,了解相关参数是非常重要的。
本文将介绍一些常见的工业镜头相关参数,帮助读者更好地理解和选择适合自己需求的工业镜头。
1. 焦距 (Focal Length)焦距是工业镜头最基本的参数之一,它决定了镜头的放大倍率和视场角。
焦距越长,所拍摄的场景越小,放大倍率越大;焦距越短,所拍摄的场景越大,放大倍率越小。
一般来说,焦距越长的镜头适用于需要放大细节的应用,焦距越短的镜头适用于需要拍摄大范围场景的应用。
2. 对焦范围 (Focus Range)对焦范围是指工业镜头能够清晰对焦的距离范围。
在工业应用中,对焦范围通常需要根据实际需求来选择。
对焦范围较小的镜头适合需要对焦于近距离物体的应用,对焦范围较大的镜头适合对焦于远距离物体的应用。
3. 光学口径 (Optical Aperture)光学口径是指工业镜头镜片的直径大小,决定了镜头能够通过的光线量。
光学口径越大,镜头能够通过的光线越多,适用于低光条件下的拍摄。
光学口径对应的F值也是评估镜头透光能力的指标,F值越小,透光能力越强。
4. 图像传感器尺寸 (Image Sensor Size)图像传感器尺寸是指工业相机所使用的图像传感器的尺寸大小。
工业镜头的图像传感器尺寸需要与相机的图像传感器尺寸相匹配才能获得最佳的成像效果。
常见的图像传感器尺寸有1/3英寸、1/2英寸、2/3英寸等。
5. 解析度 (Resolution)解析度是指工业镜头能够捕捉和呈现的图像细节数量和清晰度。
解析度通常以水平线对应的图像细节数量来表示,单位为线对每毫米。
较高的解析度意味着镜头能够捕捉更多的细节并提供更清晰的图像。
6. 失真率 (Distortion)失真率是评估工业镜头图像形变程度的指标。
镜头失真会使图像形状发生扭曲或拉伸,影响成像的准确性。
低失真率的工业镜头能够提供更真实、更准确的图像。
工业相机镜头地全参数与选型工业相机镜头是工业自动化领域中重要的设备之一,广泛应用于机器视觉、智能检测、无损检测等领域。
在选购工业相机镜头时,需要考虑到相机的应用环境、被测物体的特性以及相机镜头的参数。
本文将介绍工业相机镜头的全参数并进行选型分析。
一、工业相机镜头的全参数1.焦距(Focal Length):焦距是镜头将光线聚焦的能力。
不同的焦距会影响镜头的视角和放大倍数。
一般来说,较长焦距的镜头具有较大的放大倍数和较小的视角,适合远距离拍摄;较短焦距的镜头具有较小的放大倍数和较大的视角,适合近距离大范围拍摄。
2.镜头结构(Lens Structure):镜头的结构包括透镜的数量和排列方式。
常见的结构有单透镜结构、双透镜结构、复合透镜结构等。
不同的结构会影响成像质量、畸变程度和成本。
3.光圈(Aperture):光圈控制着进入相机的光线量,它是一个由多个薄片组成的机械装置。
可以通过调节光圈的大小来控制曝光量和景深。
较大的光圈适合拍摄光线较暗的场景,提高曝光量;较小的光圈适合拍摄光线较亮的场景,提高景深。
4.最小对焦距离(Minimum Focus Distance):最小对焦距离是指物体与镜头的最小距离,也是相机能够聚焦的最小距离。
镜头的最小对焦距离直接影响镜头的应用范围,较小的最小对焦距离适合拍摄微小物体,较大的最小对焦距离适合拍摄大型物体。
5.最大光学放大倍率(Maximum Optical Magnification):最大光学放大倍率是镜头能够放大物体的倍数。
较大的光学放大倍率可以提高图像的清晰度和细节,适合拍摄对细节要求较高的场景。
6.视场角(Field of View):视场角是指从相机镜头看到的场景范围。
它受到镜头焦距、相机感光元件尺寸和被测物体距离的影响。
一般来说,较长焦距的镜头具有较小的视场角,较短焦距的镜头具有较大的视场角。
7.图像传感器尺寸(Image Sensor Size): 图像传感器尺寸是指相机感光元件的尺寸。
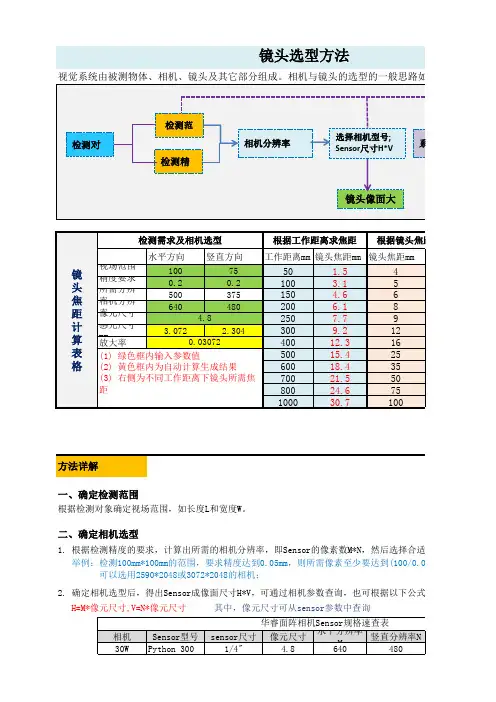
镜头选型方法一、确定检测范围根据检测对象确定视场范围,如长度L和宽度W。
二、确定相机选型1. 根据检测精度的要求,计算出所需的相机分辨率,即Sensor的像素数M*N,然后选择合适的 举例:检测100mm*100mm的范围,要求精度达到0.05mm,则所需像素至少要达到(100/0.05) 可以选用2590*2048或3072*2048的相机;2. 确定相机选型后,得出Sensor成像面尺寸H*V,可通过相机参数查询,也可根据以下公式计H=M*像元尺寸,V=N*像元尺寸 其中,像元尺寸可从sensor参数中查询3. 确定相机选型后,计算成像系统的放大率β=目标成像尺寸/目标实际尺寸=Sensor尺寸/对应视场大小举例:采用200W相机,Sensor水平尺寸H=9.216mm,对应检测长度L=100mm,则系统放大率 β=H/L=0.092三、镜头选刑1. 确定镜头像面规格及分辨率:(1) 镜头成像面应不小于Sensor成像面尺寸,否则可能会出现黑边或暗角。
如搭配1/1.8"相机(2) 镜头成像面不宜大于Sensor尺寸太多,否则可能会导致镜头清晰度不高或价格过高或外形(3) 镜头分辨力一般不低于Sensor分辨率要求,如1/1.8" 600W相机搭配2/3" 2MP镜头时清晰度2. 根据视场范围、Sensor尺寸和工作距离估算镜头焦距f:若工作距离为D,则镜头焦距可按以下公式进行估算:f=β*D举例:若系统成像放大率β=0.092,工作距离D=200mm,则镜头焦距约为f=0.092*200mm=19.4mm;此时选择1 则实际放大率β=f/D=0.08;若要保证原来0.092mm的放大率,可将工作距离调整为D=16/0.092=173m合适的相机型号0.05)*(100/0.05)=2000*2000,公式计算:92*200mm=19.4mm;此时选择16mm镜头,作距离调整为D=16/0.092=173mm清晰度可能较差;nsor尺寸/对应视场大小则系统放大率 β=H/L=0.092"相机可选用1/1.8"或2/3"的镜头;或外形尺寸过大等问题;。
机器视觉中用工业镜头与工业相机CCD选型指导手册道镜头的参数指标光学镜头一般称为摄像镜头或摄影镜头,简称镜头,其功能就是光学成像。
在机器视觉系统中,镜头的主要作用是将成像目标聚焦在图像传感器的光敏面上。
镜头的质量直接影响到机器视觉系统的整体性能;合理选择并安装光学镜头,是机器视觉系统设计的重要环节。
1.镜头的相关参数1焦距焦距是光学镜头的重要参数,通常用 f 来表示。
焦距的大小决定着视场角的大小,焦距数值小,视场角大,所观察的范围也大,但距离远的物体分辨不很清楚;焦距数值大,视场角小,观察范围小,只要焦距选择合适,即便距离很远的物体也可以看得清清楚楚。
由于焦距和视场角是一一对应的,一个确定的焦距就意味着一个确定的视场角,所以在选择镜头焦距时,应该充分考虑是观测细节重要,还是有一个大的观测范围重要,如果要看细节,就选择长焦距镜头;如果看近距离大场面,就选择小焦距的广角镜头。
2光阑系数即光通量,用 F 表示,以镜头焦距 f 和通光孔径 D 的比值来衡量。
每个镜头上都标有最大 F 值,例如6mm/F1.4 代表最大孔径为 4.29 毫米。
光通量与 F 值的平方成反比关系,F 值越小,光通量越大。
镜头上光圈指数序列的标值为 1.4,2,2.8,4,5.6,8,11,16,22 等,其规律是前一个标值时的曝光量正好是后一个标值对应曝光量的 2 倍。
也就是说镜头的通光孔径分别是 1/1.4,1/2,1/2.8,1/4,1/5.6,1/8,1/11,1/16,1/22,前一数值是后一数值的根号 2 倍,因此光圈指数越小,则通光孔径越大,成像靶面上的照度也就越大。
3景深摄影时向某景物调焦,在该景物的前后形成一个清晰区,这个清晰区称为全景深,简称景深。
决定景深的三个基本因素: 光圈光圈大小与景深成反比,光圈越大,景深越小。
焦距焦距长短与景深成反比,焦距越大,景深越小。
物距物距大小与景深成正比,物距越大,景深越大。
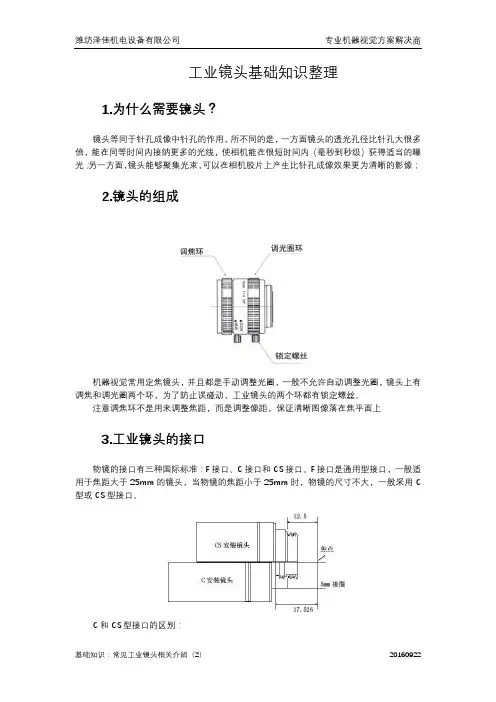
工业镜头基础知识整理1.为什么需要镜头?镜头等同于针孔成像中针孔的作用,所不同的是,一方面镜头的透光孔径比针孔大很多倍,能在同等时间内接纳更多的光线,使相机能在很短时间内(毫秒到秒级)获得适当的曝光;另一方面,镜头能够聚集光束,可以在相机胶片上产生比针孔成像效果更为清晰的影像;2.镜头的组成机器视觉常用定焦镜头,并且都是手动调整光圈,一般不允许自动调整光圈,镜头上有调焦和调光圈两个环,为了防止误碰动,工业镜头的两个环都有锁定螺丝。
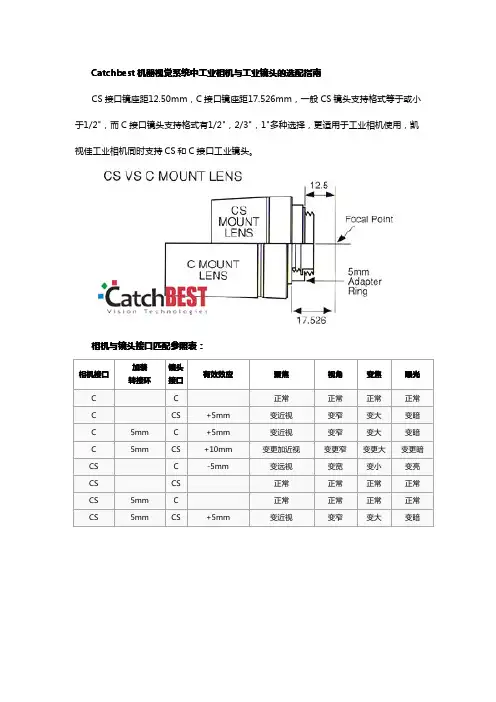
注意调焦环不是用来调整焦距,而是调整像距,保证清晰图像落在焦平面上3.工业镜头的接口物镜的接口有三种国际标准:F接口、C接口和CS接口。
F接口是通用型接口,一般适用于焦距大于25mm的镜头,当物镜的焦距小于25mm时,物镜的尺寸不大,一般采用C 型或CS型接口。
C和CS型接口的区别:C与CS型接口的区别在于镜头与相机接触面(基准面)至相机焦平面(摄像机CCD光电感应器所处位置)的距离,即法兰距不同,C型接口法兰距为17,562mm,CS型接口法兰距为12.5mm。
C型接口镜头与CS型相机之间增加一个5mm的C/CS转接环可以配合使用,CS型接口与C型接口相机无法配合使用。
4.工业镜头的基本参数视场:Field of View,即FOV,也叫视野范围,指可以观测到的物体的可视范围。
工作距离:Working Distance,即WD,指从镜头前部到受检物体表面的距离,在该距离下镜头可以清晰成像。
分辨率:Resolution,指镜头可清晰分辨被拍摄物体细节的能力,在像平面1mm内可以分辨开的黑白相间的线条对数,分辨率的单位是“线对/毫米”(lp/mm)。
一般说的百万象素级的镜头,分辨率为100线对/mm。
景深:Depth of View,在景物空间中,位于调焦平面前后一定距离内还能够清晰成像的纵深距离,也就是在实际像平面上获得相对清晰影像的景物精简深度范围。
焦距:Focal Length,焦距是从镜头的中心点到焦平面上所形成的清晰影像之间的距离,焦距数值小,视角大,所观察到的范围也大,但距离远的物体成像不是很清晰,焦距数值大,视角小,观察范围小,但距离较远的物体也可以清晰成像,有定焦和变焦两种镜头型号。
ccd定位补偿算法一、CCD定位补偿算法简介CCD(Charge Coupled Device,电荷耦合器件)定位补偿算法是一种基于图像处理的定位方法。
在工业自动化、机器视觉等领域,CCD定位技术得到了广泛的应用。
然而,由于外界环境、设备自身等因素的影响,CCD定位精度会受到影响,此时需要采用补偿算法来提高定位精度。
二、CCD定位补偿算法原理CCD定位补偿算法主要通过以下几个步骤实现:1.采集图像:首先,利用CCD摄像头捕捉目标物体的图像。
2.图像预处理:对采集到的图像进行去噪、灰度化、边缘检测等预处理操作,为后续定位提供清晰、准确的图像信息。
3.特征提取:从预处理后的图像中提取目标物体的特征,如边缘、角点等。
4.建立数学模型:根据提取的特征,建立目标物体的数学模型,如几何形状、尺寸等。
5.定位计算:利用数学模型,计算目标物体在图像中的位置,从而实现定位。
6.误差补偿:分析定位过程中可能出现的误差来源,如镜头畸变、光照影响等,对定位结果进行误差补偿,提高定位精度。
三、应用场景及优势CCD定位补偿算法在以下场景中具有广泛的应用:1.工业自动化:如机器人在生产线上的精确控制、自动化装配等。
2.机器视觉:如无人驾驶汽车的感知与决策、智能交通监控等。
3.生物医学:如内窥镜手术、病理切片分析等。
4.航空航天:如卫星遥感图像处理、无人机导航控制等。
CCD定位补偿算法的优势主要体现在:1.高效性:算法运行速度快,适用于实时控制场景。
2.高精度:通过误差补偿,提高定位精度。
3.抗干扰能力强:算法对光照、镜头畸变等干扰因素具有较强的抗干扰能力。
四、算法实现与实例分析CCD定位补偿算法的具体实现可以参考以下步骤:1.初始化参数:设置图像采集设备、图像处理方法、数学模型等参数。
2.图像采集与预处理:按照设定的参数,进行图像采集和预处理。
3.特征提取与数学模型建立:对预处理后的图像进行特征提取,建立目标物体的数学模型。
内容简介一、面阵相机和镜头选型 (2)二、针对速度和曝光时间的影响,产品是否有拖影 (2)三、线阵相机和镜头选型 (2)四、图像采集卡、相机接口、PCI、PCI-E插槽的选型 (3)五、线阵相机、镜头、光源的选型详解 (4)六、图像采集卡的选型详解 (9)七、线阵摄像机与面阵摄像机的区别 (14)八、图像采集卡选型详解 (18)一、面阵相机和镜头选型已知:被检测物体大小为A*B,要求能够分辨小于C,工作距离为D解答:1.计算短边对应的像素数E=B/C,相机长边和短边的像素数都要大于E。
2.像元尺寸=产品短边尺寸B/所选相机的短边像素数3.放大倍率=所选相机芯片短边尺寸/相机短边的视野范围4.可分辨的产品精度=像元尺寸/放大倍率(判断是否小于C)5.物镜的焦距=工作距离/(1+1/放大倍率)单位:mm6.像面的分辨率要大于1/(2*0.1*放大倍率)单位:lp/mm以上只针对镜头的主要参数进行计算选择,其他如畸变、景深、环境等,可根据实际要求进行选择。
二、针对速度和曝光时间的影响,产品是否有拖影已知:确定每一次检测的范围为80mm*60mm,200万像素CCD相机(1600*1200),相机或产品运动速度为12m/min = 200mm/s。
曝光时间计算:曝光时间< 长边视野范围/(长边像素值*产品运动速度)曝光时间< 80mm/(1600*250mm/s)曝光时间< 0.00025s = 1/4000 s总结:故曝光时间要小于1/4000 s ,图像才不会产生拖影。
三、线阵相机和镜头选型相机选型:已知:幅宽为1600mm、检测精度1mm/pixel、运动速度22000mm/s、物距1300mm相机像素数=幅宽/检测精度=1600mm / 1mm/pixel = 1600pixel最少2000个像素,选定为2k相机实际检测精度=幅宽/实际像素=1600mm/2048pixel=0.8mm/pixel扫描行频=运动速度/实际检测精度=22000mm/0.8mm=27.5KHz应选定相机为2048像素28kHz相机,像元尺寸10um选用一个VT-FAGL2015线阵相机或两个103k-1k线阵相机拼接镜头选型:sensor长度=像素宽度×像素数=0.01mm×2048=20.48mm镜头焦距= sensor长度×物距/幅宽=20.48×1300/1600=16mm四、图像采集卡、相机接口、PCI、PCI-E插槽的选型图像采集卡的数据率(又称点频)>= 1.2 x相机数据率相机数据率(又称像素时钟)=相机分辨率x相机帧频相机接口的带宽要大于图像采集卡的数据率插槽的带宽> 图像采集卡的数据率> 相机接口的带宽> 1.2 x相机数据率PCI插槽有PCI 32bit和PCI 64bit的区别。
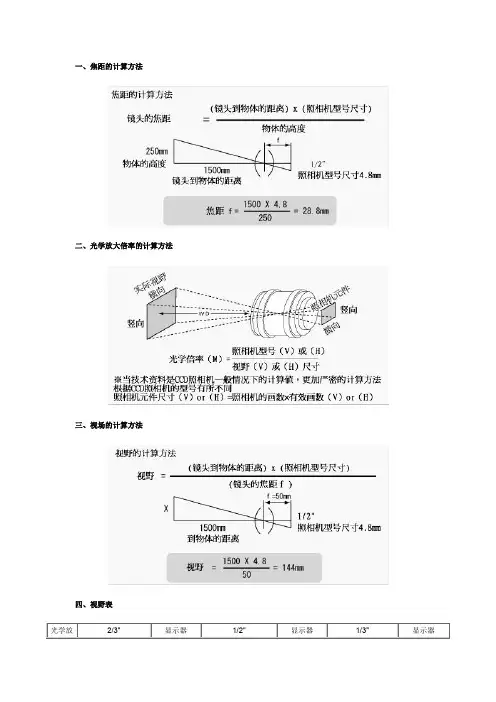
一、焦距的计算方法
二、光学放大倍率的计算方法
三、视场的计算方法
四、视野表
五、机器视觉中工业镜头的计算方式
1、WD 物距工作距离(Work
Distance,WD)。
2、FOV 视场视野(Field of View,FOV)
3、DOV 景深(Depth of Field)。
4、Ho:视野的高度
5、Hi:摄像机有效成像面的高度(Hi来代表传感器像面的大小)
6、PMAG:镜头的放大倍数
7、f:镜头的焦距
8、LE:镜头像平面的扩充距离
六、相机和镜头选择技巧
1、相机的主要参数:
感光面积SS(Sensor Size)
2、镜头的主要参数:
焦距FL(Focal Length)
最小物距Dmin(minimum Focal Distance)
3、其他参数:
视野FOV(Field of View)
像素pixel
FOVmin=SS(Dmin/FL)
如:SS=6.4mm,Dmin=8in,FL=12mm pixel=640*480
则:FOVmin=6.4(8/12)=4.23mm
4.23/640=0.007mm
如果精度要求为0.01mm,
1pixels=0.007mm<0.01mm
结论:可以达到设想的精度七、工业相机传感器尺寸大小:
1/4″:(3.2mm×2.4mm);1/3″:(4.8mm×3.6mm);1/2″:(6.4mm×4.8mm);2/3″:(8.8mm×6.6mm);
1″:(12.8mm×9.6mm);
八、光学放大率。
1/2 〃: (6.4mm x 4.8mm);、机器视觉中工业镜头的计算方式1、 WD 物距工作距离(Work Distance , WD 。
2、 FOV 视场视野(Field of View ,FOV3、 DOV 景深(Depth of Field )。
4、 Ho:视野的高度5、 Hi:摄像机有效成像面的高度(Hi 来代表传感器像面的大小)6、 PMAG 镜头的放大倍数7、 f:镜头的焦距8、 LE:镜头像平面的扩充距离LE=Di-f=PMAG»f、相机和镜头选择技巧1、相机的主要参数:感光面积 SS (Sensor Size )2、 镜头的主要参数:焦距 FL (Focal Length )最小物距 Dmin ( minimum Focal Distance )3、 其他参数:视野 FOV( Field of View ) 像素pixelFOVmi n=SS(Dmi n/FL )工业相机传感器尺寸大小:(单位: mm2.4mm);6.6mm);1/3 ": (4.8mm X 3.6mm); T: (12.8mm X 9.6mm);2012年8月1日艾菲特光电I 配、DOV 4机器视觉工业镜头计算方法(一)3-X.Sonsor Site (m)Field of View (u)IWMAGf+FMAG女口: SS=6.4mm Dmin=8in , FL=12mm pixel=640*480 则:FOVmin=6.4 (8/12)=4.23mm 4.23/640=0.007mm 如果精度要求为 0.01mm 1pixels=0.007mm<0.01mm 结论:可以达到设想的精度FL 31 =1 总D n imm四、CCD相机元件的尺寸五、线阵传感器尺寸(单位:mm<820miX750hit/7uX5000bit <409M20.48x tow;| 10|j10.24六、公式:分辨率(卩m)=0.61 (固定值)X0.55 (设计波长)* NA有效F No=放大倍率/2NA景深(mm)=2(可接受的模糊圆直径x有效F No*放大倍率2)光通量直径(© )=2NAx物体的高度+视野尺寸(角度)七、显示器倍率及综合倍率的求法:显示器倍率=显示器英寸数X25.4 (1英寸)* CCD目机对角尺寸综合倍率=显示器倍率x光学倍率例:2x光学倍率镜头和1/2“ CCD相机的组合,在14“显示器上的影像综合倍率H 一on 14X23,4显不器倍率二——-——=004址45综合倍率=44.45x2=88.9八、光学放大率2009年3月25日艾菲特光电工业镜头相当于人眼的晶状体,如果没有晶状体,人眼看不到任何物体;如果没有镜头,那么摄像头所输出的图像;就是白茫茫的一片,没有清晰的图像输出,这与我们家用摄像机和照相机的原理是一致的。
工业CCD相机的功能及参数设置工业CCD相机的功能及参数设置1、同步方式的选择对单台工业CCD相机而言,主要的同步方式有:内同步、外同步、电源同步及等。
其具体功能如下:内同步:利用相机内置的同步信号发生电路产生的同步信号来完成同步信号控制;外同步:通过外置同步信号发生器将特定的同步信号送入相机的外同步输入端,完成满足对相机的特殊控制需要;电源同步(线性锁定,line lock):用相机的AC电源完成垂直同步。
对于由多个CCD相机构成的图像采集系统,希望所有的视频输入信号是垂直同步的,以避免变换相机输出时出现的图像失真。
此时,可利用同一个外同步信号发生器产生的同步信号驱动多台相机,以实现多相机的同步图像采集。
2.自动增益控制CCD相机通常具有一个对CCD的信号进行放大的视频放大器,其放大倍数称为增益。
若放大器的增益保持不变,则在高亮度环境下将使视频信号饱合。
利用相机的自动增益控制(AGC)电路可以随着环境内外照度的变化自动的调整放大器的增益,从而可以使相机能够在较大的光照范围内工作。
3.背光补偿通常,CCD相机的AGC工作点是以通过对整个视场的信号的平均值来确定的。
当视场中包含一个很亮的背景区域和一个很暗的前景目标时,所确定的AGC工作点并不完全适合于前景目标。
当启动背景光补偿时,CCD相机仅对前景目标所在的子区域求平均来确定其AGC工作点,从而提高了成像质量。
4.电子快门CCD相机一般都具备电子快门特性,电子快门不需任何机械部件。
CCD相机采用电子快门控制CCD 的累积时间。
当开启电子快门时,CCD相机输出的仅是电子快门开启时的光电荷信号,其余光电荷信号则被泄放。
目前,CCD相机的最短电子快门时间一般为1/10000秒;当电子快门关闭时,对NTSC制式相机,其CCD累积时间为1/60秒;对于PAL制式相机,则为1/50秒。
较高的快门速度对于观察运动图像会产生一个“停顿动作”效应,从而大大地增加了相机的动态分辨率。
工业相机标定方法工业相机是用于机器视觉系统的一种高精度成像设备,其中照相机需要对场景进行校准,以确保图像的准确性。
这一过程被称为相机标定。
相机标定是机器视觉应用中最基本和必要的步骤之一,因此它的重要性不言而喻。
相机校准的目的是确定相机的内部参数和外部参数。
内部参数包括焦距、畸变、像素大小等,并且是相机固有属性。
外部参数是相机在空间中的位置和姿态,即相机的位置和方向。
在进行相机标定之前,必须先准备好以下设备和工具:1. 相机:标定之前一定要保证相机没有损坏或变形,这会影响标定的结果。
2. 标定板:在相机标定过程中需要用到一个标准的标定板。
标定板是一个标准的图像,在标定过程中,相机拍摄这个图像,然后根据这个图像计算相机的内外参数。
3. 计算机:标定过程需要使用一台计算机,运行标定程序,并实时显示标定结果。
下面是相机标定的具体步骤:1. 放置标定板:将标定板放置在被测场景中,距离相机足够近,以便相机能够拍摄到全部标定板等信息。
2. 相机调整:在将标定板放好后,需要根据相机拍摄的实际视野来调整相机的参数,包括焦距、曝光时间等,以确保拍摄效果更佳。
3. 拍摄标定图象:设计好标定板的要求,进行标定板的拍摄。
拍摄一系列标定图像(至少10幅),每幅都保持相机角度,距离和镜头等参数相同,仅仅变换标定板的平移和旋转。
4. 制作图样并提取标志:将标定图像逐一输入标定程序,并对相应的角点位置进行提取和保存。
对点的提取可以使用OpenCV中的detectcorner 或calibratedCamera5. 参数计算:根据提取的角点信息,计算相机的内部和外部参数。
使用OpenCV或MATLAB中的CameraCalibration工具箱来计算相机的参数。
6. 校正结果:实时显示相机的结果,并进行调整。
7. 存储结果:将计算出的参数保存到相机固件中,以方便日后的使用。
通过以上步骤,我们可以准确地获得相机的内部和外部参数,保证了机器视觉的应用准确性。
远心镜头计算公式远心镜头计算公式::光学倍率=相机芯片尺寸相机芯片尺寸((长、宽)/视野视野((长、宽)镜头支持靶面镜头支持靶面尺寸尺寸尺寸≥≥相机靶面尺寸相机芯片尺寸2/3 长8.45mm 宽 7.07mm1/2 长6.4mm 宽 4.8mm1/3 长4.8mm 宽 3.6mm1/4 长3.2mm 宽 2.4mm1/2.5 长5.12mm 宽3.84mm1/1.8 长7.13mm 宽 5.37mm1/2.3 长6.16mm 宽 4.62mm机器视觉系统中,工业镜头相当于人的眼睛,其主要作用是将目标的光学图像聚焦在图像传感器(相机)的光敏面阵上。
视觉系统处理的所有图像信息均通过工业镜头得到,工业镜头的质量直接影响到视觉系统的整体性能。
下面对机器视觉工业镜头的相关专业术语做以详解。
一、远心光学系统远心光学系统::指主光线平行于工业镜头光学轴的光学系统。
而光从物体朝向镜头发出,与光学轴保持平行,甚至在轴外同样如此,则称为物体侧远心光学系统。
:二、远心镜头远心镜头:远心镜头指主光线与镜头光源平行的工业镜头。
有物方远心,像方远心,双侧远心。
普通工业镜头主光线与镜头光轴有角度,因此工件上下移动时,像的大小有变化。
双侧远心境头主物方,像方均为主光线与光轴平行光圈可变,可以得到高的景深,比物方远心境头更能得到稳定的像最适合于测量用图像处理光学系统,但是大型化成本高物方远心境头只是物方主光线与镜头主轴平行工件上下变化,图像的大小基本不会变化使用同轴落射照明时的必要条件,小型化亦可对应像方远心境头只是像方主光线与镜头光轴平行相机侧即使有安装个体差,也可以吸收摄影倍率的变化用于色偏移补偿,摄像机本应都采用这种镜头三、远心光学系统的特色远心光学系统的特色::优点优点::更小的尺寸。
减少镜头数量,可降低成本。
缺点缺点::上下移动物体表面时,会改变物体尺寸或位置。
优点优点::上下移动物体表面时,不会改变物体尺寸或位置。
使用同轴照明时。