Stokes五阶波公式
- 格式:pdf
- 大小:277.19 KB
- 文档页数:3
第七章 波浪理论及其计算原理在自然界中;常可以观察到水面上各式各样的波动,这就是常讲的波浪运动,它造成海洋结构的疲劳破坏,也影响船的航行和停泊的安全。
波浪的动力作用也常引起近岸浅水地带的水底泥沙运动,致使岸滩崩塌,建筑物前水底发生淘刷,港口和航道发生淤积,水深减小,影响船舶的通航和停泊。
为了海洋结构物、驾驶船舶和船舶停靠码头的安全,必须对波浪理论有所了解。
一般讲,平衡水面因受外力干扰而变成不平衡状态,但表面张力、重力等作用力则使不平衡状态又趋于平衡,但由于惯性的作用。
这种平衡始终难以达到,于是,水体的自由表面出现周期性的有规律的起伏波动,而波动部位的水质点则作周期性的往复振荡运动。
这就是波浪现象的特性。
波浪可按所受外界的干扰不同进行分类。
由风力引起的波浪叫风成波。
由太阳、月亮以及其它天体引起的波浪叫潮汐波。
由水底地震引起的波浪叫地震水波由船舶航行引起的波浪叫船行波。
其中对海洋结构安全影响最大的是风成波。
风成波是在水表面上的波动,也称表面波。
风是产生波动的外界因素,而波动的内在因素是重力。
因此,从受力的来看;称为重力波。
视波浪的形式及运动的情况,波浪有各种类型。
它们可高可低,可长司短。
波可是静止的一一驻波(即两个同样波的相向运动所产生的波,也可以是移动的——推进波以一定的速度将波形不变地向一个方向传播的波),可以是单独的波,也可以是一个接一个的一系列波所组成的波群。
§7-1 液体波动理论一、流体力学基础1、速度场 描述海水质点的速度随空间位置和时间的变化规律的一个矢量。
),,,(t z y x V V =它的三个分量为:x 方向的量:),,,(t z y x u u =y 方向的量:),,,(t z y x v v =z 方向的量:),,,(t z y x w w =2、速度势 对于作无旋运动的液体,存在一个函数,它能反映出速度的变化,但仅仅是反映速度大小的变化,这个函数称为速度v的势函数,简称速度势: ),,,(t z y x φφ=3、速度与速度势的关系x u ∂∂=φ, y v ∂∂=φ, zw ∂∂=φ 二、海水运动的基本假设1、海水无粘性,只有重力是唯一的外力;2、液体自由液面上的压力为常数;3、液体波动振幅相对于波长为无限小;4、液体作无旋运动。
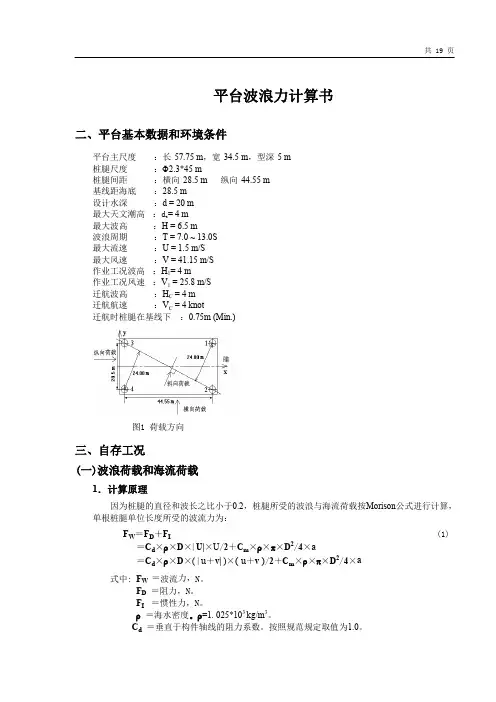
共 19 页平台波浪力计算书二、平台基本数据和环境条件平台主尺度:长57.75 m,宽34.5 m,型深5 m桩腿尺度:Φ2.3*45 m桩腿间距:横向28.5 m 纵向44.55 m基线距海底:28.5 m设计水深:d = 20 m最大天文潮高:d t= 4 m最大波高:H = 6.5 m波浪周期:T = 7.0 ~ 13.0S最大流速:U = 1.5 m/S最大风速:V = 41.15 m/S作业工况波高:H1= 4 m作业工况风速:V1 = 25.8 m/S迁航波高:H C = 4 m迁航航速:V C = 4 knot迁航时桩腿在基线下:0.75m (Min.)图1 荷载方向三、自存工况(一)波浪荷载和海流荷载1.计算原理因为桩腿的直径和波长之比小于0.2,桩腿所受的波浪与海流荷载按Morison公式进行计算,单根桩腿单位长度所受的波流力为:F W=F D+F I (1)=C d×ρ×D×| U|×U/2+C m×ρ×π×D2/4×a=C d×ρ×D×( | u+v| )×( u+v )/2+C m×ρ×π×D2/4×a式中: F W =波流力,N。
F D=阻力,N。
F I=惯性力,N。
ρ=海水密度。
ρ=1. 025*103 kg/m3。
C d=垂直于构件轴线的阻力系数。
按照规范规定取值为1.0。
C m =惯性力系数。
按照规范规定取值为2.0 。
D =构件的直径。
D =2.3m 。
U =垂直于构件轴线的水质点相对于构件的总速度分量,m/s 。
u =垂直于构件轴线的波浪引起的水质点相对于构件的速度分量,m/s 。
v =垂直于构件轴线的海流引起的水质点速度分量。
计算中海流的方 向取和波浪相同的方向,v = 1.5m/s 。
a =垂直于构件轴线的水质点相对于构件的加速度分量,m/s 2。

•Stokes波是用有限个简单的频率成比例的余弦波来逼近具有单一周期的规则的有限振幅波。
{3.1.1 STOKES 波理论的分析方法
尽管假定每一个Φn 都满足自由表面条件,但处理其平方及乘积非
线性项仍是一个困难问题。
自由表面总是在静水面附近。
将Φ在自由表面z=η处用Taylor级数展开为
将上式代入自由表面边界条件,可得
η
ηϕηηϕ
==∂∂∂∂+∂∂=∂∂z z x x t z 0)(21=η+ϕ∇⋅ϕ∇+∂ϕ∂η
=η=g t z z
)
(2cos )cos(21t kx a t kx a ωωη−+−=
{3.1.2 STOKES 二阶波
三、水质点的运动轨迹
净位移
波生流
kd
d z k c k H kd
d z k c L H U 2022202
2sinh )(2cosh 8sinh )(2cosh 21+=+⎟⎠⎞⎜⎝⎛=π
波剖面:公式(3.98)
c
H
d
c
H
d
3.4 几种波浪理论的适用范围 纵、横坐标
破碎界限
深水、极浅水界限
椭圆余弦波、
Stokes波界限。
波浪理论波浪理论⽬前被⼴泛应⽤的波浪理论的研究经历了从规则波到随机波的过渡,规则波理论的特点是将海浪运动看成确定的函数形式,通过流体⼒学分析研究各种情况下波浪的动⼒学性质和运动规律。
规则波理论的研究始于19世纪,⾄今为⽌,经历了由线性理论向⾮线性理论及湍流理论发展的过程。
其理论主要包括微幅波理论(Airy理论)、Stokes波理论、椭圆余弦波理论、孤⽴波理论等。
微幅波理论是应⽤势函数来研究波浪运动的⼀种线性波浪理论,是波浪理论中最基本、最重要的内容,也是近海⼯程中应⽤的最⼴泛的部分。
1887年英国流体⼒学家Stokes提出了Stokes波理论,在近海⼯程计算中,⼈们常采⽤⾼阶Stokes波应⽤于最⼤波的计算公式。
Stokes波没有考虑⽔深变化对结果的影响,只适⽤于⼀般⽔深的情况。
在浅⽔情况下,⽤Stokes波理论达不到所要求的精度,如果采⽤能反映决定波动性质的主要因素的椭圆余弦波理论描述波浪运动,可以获得较满意的结果。
椭圆余弦波理论最早是在1895年由Korteweg等提出的,其后由Keulegan等进⼀步研究并使之适⽤于⼯程实践。
各种波浪理论的⽐较⽬前虽有许多⼈对各种波浪理论的适⽤范围进⾏过研究,但由于采⽤的判据各不相同,得出的结果也差别较⼤,波浪理论的适⽤范围依然只能定性分析。
现在只能确定椭圆余弦波⼀般⽤于浅⽔区,孤⽴波⼀般适⽤于近岸浅⽔区且周期波的波峰能量占全波能量的90%以上的情况,微幅波⼀般适⽤于深⽔区,⽽对于有限⽔深区,情况则较为复杂,多种波浪理论的适⽤范围在此交叉,需要依照实际⼯况进⾏分析才能选取合适的波浪理论。
1. 波浪理论的选⽤⽬前,常⽤的波浪理论主要有艾利波(Airy)理论(⼜称线性波理论或正弦波理论)、斯托克斯(Stokes)⾼阶波理论、椭圆余弦波理论、孤⽴波理论。
各波浪理论都是通过假设与简化得到的,基于不同的假设与简化,理论计算结果有别,也各有适⽤范围。
为了确定各种波浪理论的适⽤范围,不少研究者进⾏了理论分析或试验观测。
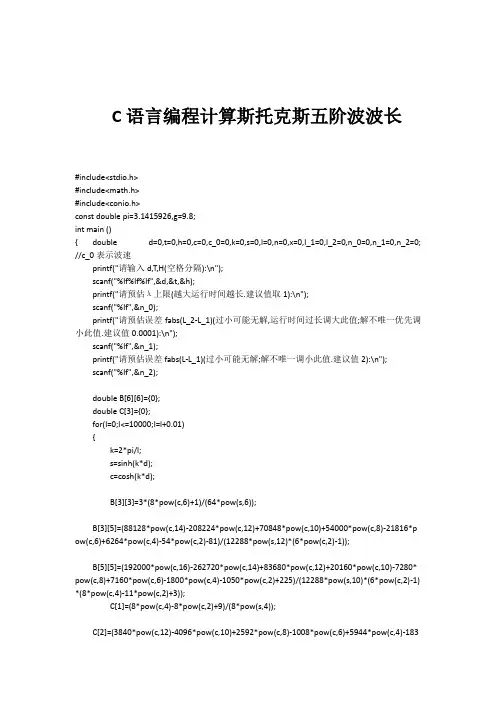
C语言编程计算斯托克斯五阶波波长#include<stdio.h>#include<math.h>#include<conio.h>const double pi=3.1415926,g=9.8;int main (){double d=0,t=0,h=0,c=0,c_0=0,k=0,s=0,l=0,n=0,x=0,l_1=0,l_2=0,n_0=0,n_1=0,n_2=0; //c_0表示波速printf("请输入d,T,H(空格分隔):\n");scanf("%lf%lf%lf",&d,&t,&h);printf("请预估λ上限(越大运行时间越长.建议值取1):\n");scanf("%lf",&n_0);printf("请预估误差fabs(L_2-L_1)(过小可能无解,运行时间过长调大此值;解不唯一优先调小此值.建议值0.0001):\n");scanf("%lf",&n_1);printf("请预估误差fabs(L-L_1)(过小可能无解;解不唯一调小此值.建议值2):\n");scanf("%lf",&n_2);double B[6][6]={0};double C[3]={0};for(l=0;l<=10000;l=l+0.01){k=2*pi/l;s=sinh(k*d);c=cosh(k*d);B[3][3]=3*(8*pow(c,6)+1)/(64*pow(s,6));B[3][5]=(88128*pow(c,14)-208224*pow(c,12)+70848*pow(c,10)+54000*pow(c,8)-21816*p ow(c,6)+6264*pow(c,4)-54*pow(c,2)-81)/(12288*pow(s,12)*(6*pow(c,2)-1));B[5][5]=(192000*pow(c,16)-262720*pow(c,14)+83680*pow(c,12)+20160*pow(c,10)-7280* pow(c,8)+7160*pow(c,6)-1800*pow(c,4)-1050*pow(c,2)+225)/(12288*pow(s,10)*(6*pow(c,2)-1) *(8*pow(c,4)-11*pow(c,2)+3));C[1]=(8*pow(c,4)-8*pow(c,2)+9)/(8*pow(s,4));C[2]=(3840*pow(c,12)-4096*pow(c,10)+2592*pow(c,8)-1008*pow(c,6)+5944*pow(c,4)-1830*pow(c,2)+147)/(512*pow(s,10)*(6*pow(c,2)-1));for(n=0;n<n_0;n=n+0.0001)//n的范围取得越大运行时间越久.n表示λ{l_1=(pi*h)/(n+pow(n,3)*B[3][3]+pow(n,5)*B[3][5]+pow(n,5)*B[5][5]);//超越方程l_2=(g*t*t*tanh(k*d)*(1+pow(n,2)*C[1]+pow(n,4)*C[2]))/(2*pi);if(fabs(l_2-l_1)<n_1&&fabs(l_1-l)<n_2&&fabs(l_2-l)<n_2){printf("波长L=%lf 系数λ=%lf\n",l_1,n);c_0=l_1/t;k=2*pi/l_1;printf("波速C=%lf 波数k=%lf\n\n",c_0,k);}}} getch();return 0;}运行效果如下:。

stokes定律公式以Stokes定律公式为标题的文章Stokes定律是描述细小颗粒在粘性流体中受到阻力的定律。
它是由爱尔兰物理学家乔治·斯托克斯于19世纪提出的,成为了流体力学中的重要定律之一。
Stokes定律可以用来计算细小颗粒在流体中的速度和阻力,对于研究微粒运动和沉降速度等现象具有重要意义。
根据Stokes定律,当细小颗粒在粘性流体中运动时,其受到的阻力与其速度成正比。
阻力的大小与颗粒的形状和大小、流体的黏性以及颗粒与流体之间的相对速度有关。
Stokes定律的数学表达式如下:F = 6πηrv其中,F代表颗粒受到的阻力,η代表流体的黏性系数,r代表颗粒的半径,v代表颗粒的速度。
根据Stokes定律,可以得出以下几个重要结论:1. 细小颗粒在粘性流体中的速度与颗粒的半径成反比。
即颗粒越小,其速度越大。
2. 细小颗粒在粘性流体中的速度与流体的黏性成反比。
即流体越黏稠,颗粒的速度越慢。
3. 细小颗粒在粘性流体中的速度与受到的阻力成正比。
即阻力越大,颗粒的速度越小。
4. 细小颗粒在粘性流体中的速度与颗粒与流体之间的相对速度成正比。
即相对速度越大,颗粒的速度越大。
Stokes定律的应用十分广泛。
在实际生活和科学研究中,我们可以利用Stokes定律来计算微小颗粒在流体中的沉降速度,从而研究颗粒的分离、过滤和沉淀等过程。
此外,Stokes定律还可以用来研究微小颗粒在空气中的扩散速度,对于理解空气污染和疾病传播等问题具有重要意义。
然而,需要注意的是,Stokes定律仅适用于低雷诺数的情况,即流体的粘性作用远大于惯性作用的情况。
在高雷诺数的情况下,惯性效应会显著影响颗粒的运动,Stokes定律就不再适用。
此外,Stokes定律也忽略了颗粒与颗粒之间的相互作用和颗粒与容器壁之间的摩擦力,因此在研究颗粒浓度较高或颗粒之间相互作用显著的情况下,需要考虑其他因素来进行精确计算。
Stokes定律是研究微小颗粒在粘性流体中受到阻力的重要定律。
基于高阶Rankine源法的波物相互作用完全非线性模拟孙雷;胡峰;姜胜超;蒋月;罗贤成;刘昌凤【摘要】采用开敝水域模拟技术和速度势分离技术,基于高阶Rankine源边界元法,在圆城内建立波浪与结构物相互作用的完全非线性数值模型.采用直接计算法求解柯西主值积分,解决速度势法向导数的奇异积分问题.采用混合欧拉-拉格朗日法追踪自由水面,采用跟随式网格技术和曲面网格重构技术捕捉并模拟瞬时自由水面和船体湿表面网格单元.利用该模型对直立圆柱的绕射问题以及具有复杂曲面的Wigley 型船的完全非线性水动力响应问题进行模拟.数值模拟与试验数据吻合良好,证明数值模型对非线性波浪与复杂曲面结构船体相互作用的适用性,可为完全非线性波物相互作用问题的相关研究提供参考.【期刊名称】《中国海洋平台》【年(卷),期】2018(033)005【总页数】8页(P22-28,37)【关键词】开敞水域;完全非线性;柯西积分;网格重构【作者】孙雷;胡峰;姜胜超;蒋月;罗贤成;刘昌凤【作者单位】大连理工大学船舶工程学院,辽宁大连,116024;大连理工大学船舶工程学院,辽宁大连,116024;大连理工大学船舶工程学院,辽宁大连,116024;大连理工大学船舶工程学院,辽宁大连,116024;大连理工大学船舶工程学院,辽宁大连,116024;大连海洋大学海洋与土木工程学院,辽宁大连,116023【正文语种】中文【中图分类】TV139.20 引言海洋结构物是海洋资源开发长期作业的依托平台,开发过程中往往伴随着恶劣的海洋环境条件,引起结构物的不利荷载和剧烈运动[1],在极端情况下,甚至会引起结构物整体倾覆,导致重大的工程事故。
但是,传统水动力软件如AQWA[2]、SESAM等都采用线性波浪假定,忽略了波浪的非线性影响,无法满足极限波浪情况下海洋结构的设计需要。
因此,有必要对非线性波浪与结构物的作用问题做进一步研究,在设计阶段准确地预测出海洋结构物在服役期间可能受到海洋环境的最大冲击,避免海洋工程事故的发生。
Stokes漂流近似公式对海洋表层流场估算的影响柏川棋;宋金宝;陈辉【摘要】本文采用波浪订正的Ekman模型,研究分析了三种Stokes漂流近似公式(单波公式、e指数公式、Phillips谱近似公式)对海洋表层流场估算的影响.海表总流场由海表面高度(SSH)数据计算的地转流和海浪模式WAVEWATCH Ⅲ输出结果计算的非地转流组成,并采用拉格朗日浮标观测数据对计算结果进行了验证.研究表明,随着Stokes漂流近似公式精度的提高,其计算的拉格朗日流速更接近于谱积分公式的计算结果,更贴近拉格朗日浮标观测数据.与谱积分公式计算的海表拉格朗日流速相比,单波公式的平均相对偏差为0.0834,e指数公式的平均相对偏差为0.0392,Phillips谱近似公式的平均相对偏差为0.0101,说明Phillips谱近似公式在不同风速下均能对谱积分公式有良好的近似效果.在低风速条件下,由Stokes漂流近似公式精度引起的海洋表层流场估算误差可以忽略不计,但随着风速增加,由近似公式精度引起的偏差逐渐变大,此时应该选择Phillips谱近似公式计算Stokes漂流,来减小误差.【期刊名称】《海洋与湖沼》【年(卷),期】2019(050)001【总页数】12页(P12-23)【关键词】波浪订正的Ekman模型;WAVEWATCH Ⅲ;Stokes漂流近似公式;海洋表层流场【作者】柏川棋;宋金宝;陈辉【作者单位】浙江大学海洋学院舟山 316000;浙江大学海洋学院舟山 316000;浙江大学海洋学院舟山 316000【正文语种】中文【中图分类】P731海洋表层是海气动量、热量、水汽交换的主界面, 在气候变化、环境污染等研究中具有重要的地位。
Ekman (1905)从理论上解释了由恒定风场驱动的海表洋流偏向主风向右侧这一现象(北半球), 由此开启了对于海洋表层流场的研究。
但传统Ekman理论与实际观测数据存在不小的偏差, Huang(1979)认为Ekman流场与风应力的夹角在10°到20°之间, 但Cushman-Roisin(1994)得到的偏角在5°到10°之间, 为了解决传统Ekman理论与观测资料的差异, 后来的研究者对传统的Ekman模型进行了修正。