23档步进电位器资料
- 格式:doc
- 大小:431.00 KB
- 文档页数:1
® 伟福Lab2000P 单片机仿真实验系统 目录 - i -目录第一章 概述 (1)第二章 伟福实验系统组成和结构 (3)第三章 板上仿真器使用方法 (12)第四章 MCS51系列单片机实验 (19)MCS96系列单片机实验 (20)8088/86系列CPU 实验 (21)软件实验1. 存储器块清零(51/96/88) (22)2. 二进制到BCD 码转换(51/96/88) (23)3. 二进制到ASCII 码转换(51/96/88) (24)4. 内存块移动(51/96/88) (25)5. 程序跳转表(51/96/88) (26)6. 数据排序(51/96/88) (27)硬件实验1. P1口输入输出(51/96) (28)2. 继电器控制(51/96) (30)3. 用74LS245读入数据(51/96/88) (31)4. 用74LS273输出数据(51/96/88) (32)5. PWM 转换电压实验(51/96) (33)6. 音频控制(51/96) (34)7. 用8255输入、输出(51/96/88) (35)8. 串行数转换并行数(51/96) (36)9. 并行数转换串行数(51/96) (38)10. 计数器实验(51) (40)11. 外部中断实验(51/96) (41)12. 定时器实验(51/96) (43)13. D/A 转换实验(51/96/88) (45)14. A/D 转换实验(51/96/88) (47)15. 外部中断实验(急救车与交通灯) (51/96) (49)16. 八段数码管显示(51/96/88) (51)17. 键盘扫描显示实验(51/96/88) (53)18. 电子时钟(51/96/88) (55)19. 单片机串行口通讯实验(51/96) (57)® 伟福Lab2000P 单片机仿真实验系统 目录 - ii -20. 打印机控制实验(51/96/88) (59)21. 直流电机控制实验(51/96/88) (61)22. 步进电机控制实验(51/96/88) (63)23. 温度传感器实验(51/96/88) (66)24. 液晶显示屏控制实验(51/96/88) (67)25. 电子琴(51/96/88) (69)26. 空调温度控制实验(51/96/88) (71)27. 计算器实验(51/96/88) (74)28. 用HSO 方式输出PWM 波形(96) (76)29. 用HSI 方式测量脉冲宽度(96) (77)30. 用HSI 中断方式统计脉冲个数(96) (78)31. 计数器实验(96) (80).... 32. 用片内A/D 做A/D 转换实验(96).. (81)33. PWM 转换电压实验(88) (82)34. 8253计数器实验(88) (83)35. 8259外部中断实验(88) (84)36. 8253定时器实验(88) (86)37. 8251A 串行口通讯实验(88) (88)第五章 逻辑分析工具 (90)本实验说明书包括8051,80C196,8088/86三种实验说明(8051单片机有6个软件实验、27个硬件实验,80C196单片机有6个软件实验、31个硬件实验,8088/86CPU 有6个软件实验、21个硬件实验)。
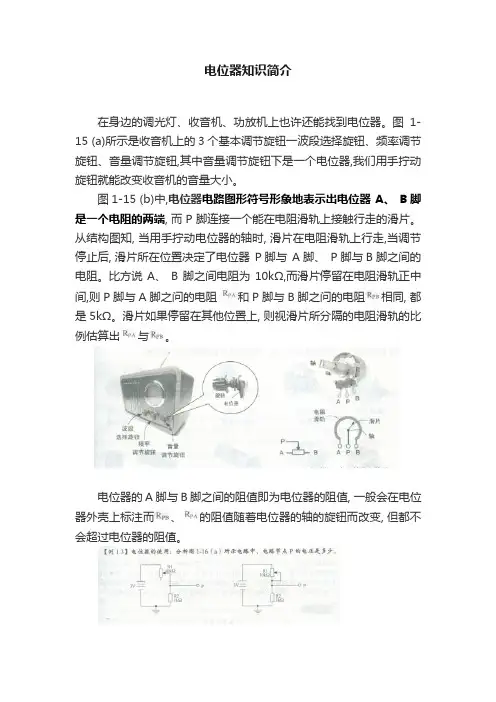
电位器知识简介在身边的调光灯、收音机、功放机上也许还能找到电位器。
图1-15 (a)所示是收音机上的3个基本调节旋钮一波段选择旋钮、频率调节旋钮、音量调节旋钮,其中音量调节旋钮下是一个电位器,我们用手拧动旋钮就能改变收音机的音量大小。
图1-15 (b)中,电位器电路图形符号形象地表示出电位器 A、 B脚是一个电阻的两端, 而P脚连接一个能在电阻滑轨上接触行走的滑片。
从结构图知, 当用手拧动电位器的轴时, 滑片在电阻滑轨上行走,当调节停止后, 滑片所在位置决定了电位器P脚与A脚、P脚与B脚之间的电阻。
比方说A、B脚之间电阻为10kΩ,而滑片停留在电阻滑轨正中间,则P脚与A脚之问的电阻和P脚与B脚之问的电阻相同, 都是5kΩ。
滑片如果停留在其他位置上, 则视滑片所分隔的电阻滑轨的比例估算出与。
电位器的A脚与B脚之间的阻值即为电位器的阻值, 一般会在电位器外壳上标注而、的阻值随着电位器的轴的旋钮而改变, 但都不会超过电位器的阻值。
在图1-16 (a)中,电位器R1与电阻R2 串联,则根据欧姆定律很容易得到P点的电压为从式(1-2)中可知P点电压取决于电位器R1,这说明只要我们调节电位器 R1的轴就可以改变。
由于电位器是一个带有机械结构的电阻可变器件, 其滑片及电阻滑轨之问有可能会因为寿命或质量问题而脱离,这会使和变为无穷大,也就是式(1-2)中,这就导致。
图1-16 (a)电路P点之后如果还有其他电路,则无法正常工作。
为了在电位器出现故障时降低灾难程度, 可以按图1-16 (b) 那样把P脚与电位器的任意一端相连, 这样不但可使电位器发挥相同作用, 还可保证当滑片与电阻滑轨脱离时, 电位器的接入电阻与其标称阻值相同, 电路不至出现太大的异常。
电位器和普通电阻一样, 除了有阻值参数外, 还有功率和种类之分。
常用的电位器有转轴式(rotary)和微调(trimmer)两种,其中各自又有一些不同类型的电位器,如图1-17 所示。
电位器基础知识资料
电位器(potentiometer)是一种电阻器。
具有一个可调节的旋钮或滑块,可以通过调整旋钮或滑块的位置来改变电路中的电阻值。
在电子电路中,电位器常用于精确地控制电压、电流或信号的变化。
电位器由一个固定电阻和一个可变电阻组成。
固定电阻一般是一个均匀的电阻片,可变电阻则是一个导电滑片或旋转电阻。
通过滑片或旋转电阻的位置,可以改变电阻器的有效电阻长度,进而控制电路中的电流和电压。
电位器有很多种不同的类型,常见的包括旋钮式电位器、滑动式电位器和多圈电位器等。
旋钮式电位器通过旋转旋钮来改变电阻值,滑动式电位器通过滑动滑块来改变电阻值,而多圈电位器则允许多圈旋转以获得更高的分辨率和精度。
在电路中,电位器被广泛应用于各种功能和应用中。
它们可以用作电压分压器,通过控制电位器的电阻值,可以调整输出电压的大小。
电位器还可以用作可变电阻,通过调整电位器的电阻值,可以控制电路中的电流大小。
此外,电位器还常用于调光器和音量控制器等应用。
电位器也常用于测量和调试电路。
通过将电位器连接到电路中,可以在电路中引入可变电阻,以研究电路的工作方式和性能。
此外,电位器还可用于校准仪器和设备,确保其输出与期望值匹配。
总之,电位器是一种常见的电子元件,用于调节电压、电流和信号的变化。
通过调整电位器的位置,可以改变电路中的电阻值,从而实现对电路的控制和调节。
电位器在领域广泛应用,具有重要的意义和价值。
电位器基础知识范文电位器是一种常用的电子元件,用于调节电路中的电压或电流。
本文将介绍电位器的基础知识,包括电位器的结构、原理、分类和应用。
第一部分:电位器的结构和原理电位器通常由一个可调式的电阻元件和一个滑动连接器组成。
电阻元件通常是一个长形条形或环形,由导电材料制成。
滑动连接器可以在电阻元件的表面滑动,从而改变电阻值。
电位器的原理是根据电阻的分压原理。
当在电路中连接电位器时,电位器的两端与电路的两个节点相连。
通过滑动连接器,可以选择电阻元件上不同位置的电阻来形成一个可调的电阻分压。
滑动连接器与电路的连接点之间的电压将取决于连接器所在的电阻位置。
第二部分:电位器的分类根据电位器的结构和用途,可以将电位器分为以下几类:1.可变电阻器:也称为旋钮电位器,通常由一个旋钮和一个旋转电阻元件组成。
旋钮可以以旋转的方式改变电阻的位置来改变电压或电流。
2.滑动电位器:滑动电位器由一个滑动电阻元件和一个滑动连接器组成。
滑动连接器可以在电阻元件上滑动改变电函数的值。
3.多圈电位器:多圈电位器由多个电阻元件和一个旋钮组成。
旋钮可以旋转多圈,从而改变电阻的位置。
4.双轨电位器:双轨电位器通常由两个电阻元件和一个滑动连接器组成。
它可以同时控制两个电路的电压或电流。
第三部分:电位器的应用电位器广泛应用于各种电路和电子设备中。
以下是电位器的一些常见应用:1.电流调节:电位器可以用来调节电路中的电流。
通过改变电阻的值,可以改变电路中的电流大小。
2.电压调节:电位器可以用来调节电路中的电压。
通过改变电阻的值,可以改变电路中的电压大小。
3.信号调节:电位器可以用来调节电子设备中的信号。
例如,它可以用来调节音响设备的音量或屏幕的亮度。
4.电路分压:电位器可以用来分压电路中的电压。
通过调整电阻的值,可以控制电路中一些节点的电压。
5.平衡调节:电位器可以用来调节电路中的平衡。
例如,它可以用来平衡音频设备中的左右声道。
总结:通过了解电位器的结构、原理、分类和应用,我们可以充分理解并正确应用电位器。
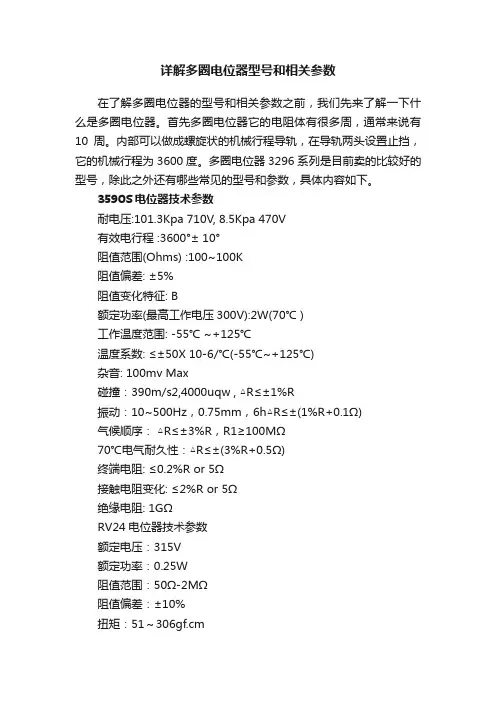
详解多圈电位器型号和相关参数在了解多圈电位器的型号和相关参数之前,我们先来了解一下什么是多圈电位器。
首先多圈电位器它的电阻体有很多周,通常来说有10周。
内部可以做成螺旋状的机械行程导轨,在导轨两头设置止挡,它的机械行程为3600度。
多圈电位器3296系列是目前卖的比较好的型号,除此之外还有哪些常见的型号和参数,具体内容如下。
3590S电位器技术参数耐电压:101.3Kpa 710V, 8.5Kpa 470V有效电行程:3600°± 10°阻值范围(Ohms) :100~100K阻值偏差: ±5%阻值变化特征: B额定功率(最高工作电压300V):2W(70℃ )工作温度范围: -55℃ ~+125℃温度系数: ≤±50X 10-6/℃(-55℃~+125℃)杂音: 100mv Max碰撞:390m/s2,4000uqw , △R≤±1%R振动:10~500Hz,0.75mm,6h△R≤±(1%R+0.1Ω)气候顺序:△R≤±3%R,R1≥100MΩ70℃电气耐久性:△R≤±(3%R+0.5Ω)终端电阻: ≤0.2%R or 5Ω接触电阻变化: ≤2%R or 5Ω绝缘电阻: 1GΩRV24电位器技术参数额定电压:315V额定功率:0.25W阻值范围:50Ω-2MΩ阻值偏差:±10%扭矩:51~306gf.cm机械寿命:15000次角度公差:280°±10°3540S电位器技术参数标称阻值范围:100Ω-100KΩ;阻值允许偏差:±5%;绝缘电阻:R1≥1GΩ;独立线性度:0.25%;有效电行程:≥3600° -10%;终端电阻:≤0.2%R或5Ω;转动噪音:≤3%R或3Ω;耐电压:101.3kPa 710V 8.5kPa 470V;以上就是多圈电位器的一部分型号和相关参数,如果您还需要其他电位器的型号参数,可拨打我们的电话进行咨询。
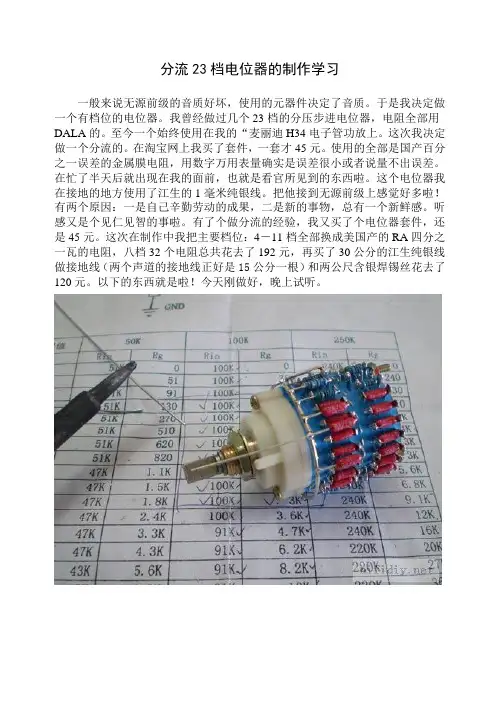
分流23档电位器的制作学习一般来说无源前级的音质好坏,使用的元器件决定了音质。
于是我决定做一个有档位的电位器。
我曾经做过几个23档的分压步进电位器,电阻全部用DALA的。
至今一个始终使用在我的“麦丽迪H34电子管功放上。
这次我决定做一个分流的。
在淘宝网上我买了套件,一套才45元。
使用的全部是国产百分之一误差的金属膜电阻,用数字万用表量确实是误差很小或者说量不出误差。
在忙了半天后就出现在我的面前,也就是看官所见到的东西啦。
这个电位器我在接地的地方使用了江生的1毫米纯银线。
把他接到无源前级上感觉好多啦!有两个原因:一是自己辛勤劳动的成果,二是新的事物,总有一个新鲜感。
听感又是个见仁见智的事啦。
有了个做分流的经验,我又买了个电位器套件,还是45元。
这次在制作中我把主要档位:4-11档全部换成美国产的RA四分之一瓦的电阻,八档32个电阻总共花去了192元,再买了30公分的江生纯银线做接地线(两个声道的接地线正好是15公分一根)和两公尺含银焊锡丝花去了120元。
以下的东西就是啦!今天刚做好,晚上试听。
这是个用普通电阻的,接地线用了铜线。
这是个学习用产品。
我用的是上海无线电九厂产的23档电位器,质量可以。
我早几年前焊的那个分压的一直很好用,接触很好。
我是上海的,所以我打过电话去询问厂里销售科要买档位开关,厂里也是肯卖给个人的,只是一个价钱问题了,你买少价钱也不是很便宜啦,而且光买来档位开关,再去配电阻也是个问题,一下子也很难到位。
所以我在淘宝网上邮购了套件。
这里我不妨卖老一下,说说我的焊接经验:我们现在一般用的都是先通后断的23-24档位开关,因此没有在更换档位的时候有“嘎达,嘎达”声。
有一个问题要注意,正因为开关是塑料的,焊接电阻的涂银接触片夹在塑料中间,在焊接的时候时间一定要短,而且电烙铁头子不能在接触片上过分用力。
否则接触片受热后接触片周围的塑料已有软化的现象再用力一压,接触片会发生里面翘起现象,严重的转不过去档位,轻的产生杂音。
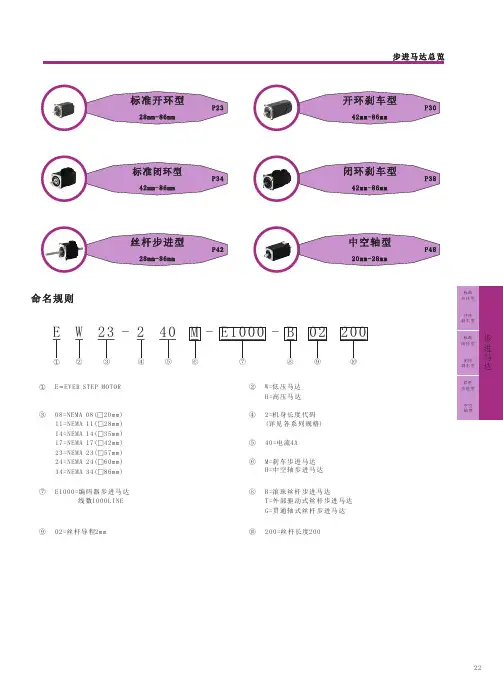
命名规则E W 23 - 2 40 M E1000 - B 02 200①②① E =EVER STEP MOTOR② W =低压马达③ 08=NEMA 08(□20mm)⑦ E1000=编码器步进马达线数1000LINE11=NEMA 11(□28mm)14=NEMA 14(□35mm)17=NEMA 17(□42mm)23=NEMA 23(□57mm)24=NEMA 24(□60mm)34=NEMA 34(□86mm)步进马达总览H =高压马达④ 2=机身长度代码⑧ B =滚珠丝杆步进马达(详见各系列规格)T =外部驱动式丝杆步进马达G =贯通轴式丝杆步进马达⑧⑤ 40=电流4A ⑥ M =刹车步进马达H =中空轴步进马达⑨ 02=丝杆导程2mm⑩ 200=丝杆长度200特点◆ RoHS 符合品◆ 法兰尺寸:□28mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 匹配驱动器:EPDO-02◆ 驱动器资料参考第12规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑绿红蓝型号:EW11-110 驱动电压:24VDC0.060.100.090.15Q Q U U E E ((N N ..m m ))001010202030304040000.030.05SPEED(RPS)SPEED(RPS)T T O O R R 5050两相直流28mm步进马达单/双轴力矩曲线接线图型号:EW11-310□ 驱动电压:24VDC特点◆ RoHS 符合品◆ 法兰尺寸:□35mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 匹配驱动器:EPDO-02◆ 驱动器资料参考第12规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑绿红蓝型号:EW14-210 驱动电压:24VDC0.140.21Q U E (N .m )01020304000.07SPEED(RPS)T O R 50两相直流35mm步进马达单/双轴力矩曲线接线图特点◆ RoHS 符合品◆ 法兰尺寸:□42mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 匹配驱动器:EPDO-02◆ 驱动器资料参考第12规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑绿红蓝型号:EW17-220 驱动电压:24VDC型号:EW17-320□ 驱动电压:24VDC型号:EW17-420□ 驱动电压:24VDC型号:EW17-520 驱动电压:24VDC0.300.300.400.600.450.450.600.90Q Q Q Q U U U U E E E E ((((N N N N ....m m m m ))))00001010101020202020303030304040404000.150.150.200.30SPEED(RPS)SPEED(RPS)SPEED(RPS)SPEED(RPS)T T T T O O O O R R R R 50505050两相直流42mm步进马达单/双轴力矩曲线接线图特点◆ RoHS 符合品◆ 法兰尺寸:□57mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 匹配驱动器:EPDO-04◆ 驱动器资料参考第14规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑橙红黄型号:EW23-140 驱动电压:24VDC0.601.00 1.400.901.502.10Q Q Q U U U E E E (((N N N ...m m m )))00010101020202030303040404000.300.500.70SPEED(RPS)SPEED(RPS)SPEED(RPS)T T T O O O R R R 505050两相直流57mm步进马达单/双轴力矩曲线接线图48VDC型号:EW23-240 驱动电压:24VDC□ 48VDC型号:EW23-340 驱动电压:24VDC□ 48VDC特点◆ RoHS 符合品◆ 法兰尺寸:□60mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 匹配驱动器:EPDO-04◆ 驱动器资料参考第14规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑橙红黄型号:EW24-240 驱动电压:24VDC1.001.50Q U E (N .m )01020304000.50SPEED(RPS)T O R 50两相直流60mm步进马达单/双轴力矩曲线接线图48VDC型号:EW24-440 驱动电压:24VDC2.003.00Q U E (N .m )0510152001.00SPEED(RPS)T O R 2548VDC特点◆ RoHS 符合品◆ 法兰尺寸:□86mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:60N◆ 径向容许负载:220N (轴末端)◆ 匹配驱动器:EPDO-08◆ 驱动器资料参考第16规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑橙红黄型号:EW34-260 驱动电压:24VDC 3.00 4.00 6.004.506.009.00Q Q Q U U U E E E (((N N N ...m m m )))000553101061515920201201.502.003.00SPEED(RPS)SPEED(RPS)SPEED(RPS)T T T O O O R R R 252515两相直流86mm步进马达单/双轴力矩曲线接线图48VDC 型号:EW34-360 驱动电压:24VDC 48VDC 型号:EW34-560 驱动电压:24VDC 48VDC 8.0012.0Q U E (N .m )03691204.00SPEED(RPS)T O R 15型号:EW34-660 驱动电压:24VDC48VDCC-C’ VIEW特点◆ RoHS 符合品◆ 法兰尺寸:□86mm ◆ 角度误差:±0.09°◆ 绝缘耐压:1500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:60N◆ 径向容许负载:220N (轴末端)◆ 匹配驱动器:EPAO-04◆ 驱动器资料参考第18规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑橙红黄型号:EH34-530 驱动电压:220VAC6.009.00Q U E (N .m )0510152003.00SPEED(RPS)T O R 25两相高压86mm步进马达单/双轴力矩曲线接线图C-C’ VIEW特点◆ RoHS 符合品◆ 法兰尺寸:□42mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 匹配驱动器:EPDO-02◆ 驱动器资料参考第12规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-绿黑红蓝型号:EW17-420M 驱动电压:24VDC型号:EW17-520M 驱动电压:24VDC0.400.600.600.90Q Q U U E E ((N N ..m m ))00101020203030404000.200.30SPEED(RPS)SPEED(RPS)T T O O R R 5050两相直流42mm刹车步进马达刹车力矩力矩曲线接线图N.m红 +黑 -24VDC马达接线刹车接线特点◆ RoHS 符合品◆ 法兰尺寸:□57mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 匹配驱动器:EPDO-04◆ 驱动器资料参考第14规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-绿黑红蓝1.00 1.401.502.10Q Q U U E E ((N N ..m m ))00101020203030404000.500.70SPEED(RPS)SPEED(RPS)T T O O R R 5050两相直流57mm刹车步进马达力矩曲线接线图型号:EW23-240 驱动电压:24VDCM 48VDC型号:EW23-350 驱动电压:24VDCM 48VDC刹车力矩N.m红 +黑 -24VDC马达接线刹车接线特点◆ RoHS 符合品◆ 法兰尺寸:□60mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 匹配驱动器:EPDO-04◆ 驱动器资料参考第14规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-绿黑红蓝两相直流60mm刹车步进马达力矩曲线接线图型号:EW24-450M 驱动电压:24VDC 2.003.00Q U E (N .m )0510152001.00SPEED(RPS)T O R 2548VDC刹车力矩 N.m红 +黑 -24VDC马达接线刹车接线特点◆ RoHS 符合品◆ 法兰尺寸:□86mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:60N◆ 径向容许负载:220N (轴末端)◆ 匹配驱动器:EPDO-08◆ 驱动器资料参考第16规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-绿黑红蓝6.009.00Q U E (N .m )03691203.00SPEED(RPS)T O R 15两相直流86mm刹车步进马达力矩曲线接线图型号:EW34-460M 驱动电压:24VDC48VDC刹车力矩 N.m红 +黑 -24VDC马达接线刹车接线C-C’ VIEW特点◆ RoHS 符合品◆ 法兰尺寸:□42mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号电流A/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-绿黑红蓝型号:EW17-420-E1000 驱动电压:24VDC型号:EW17-520-E1000 驱动电压:24VDC0.400.600.600.90Q Q U U E E ((N N ..m m ))00101020203030404000.200.30SPEED(RPS)SPEED(RPS)T T O O R R 5050两相直流42mm闭环步进马达编码器力矩曲线接线图步距角degCPR编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线特点◆ RoHS 符合品◆ 法兰尺寸:□57mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器1.00 1.401.502.10Q Q U U E E ((N N ..m m ))00101020203030404000.500.70SPEED(RPS)SPEED(RPS)T T O O R R 5050两相直流57mm闭环步进马达力矩曲线接线图型号:EW23-240 驱动电压:24VDC -E1000 48VDC型号:EW23-350驱动电压:24VDC -E1000 48VDC编码器CPRA+A-B+B-绿黑红蓝编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线特点◆ RoHS 符合品◆ 法兰尺寸:□60mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器两相直流60mm闭环步进马达力矩曲线接线图型号:EW24-450-E1000 驱动电压:24VDC2.003.00Q U E (N .m )0510152001.00SPEED(RPS)T O R 2548VDC编码器CPRA+A-B+B-绿黑红蓝编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线特点◆ RoHS 符合品◆ 法兰尺寸:□86mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:60N◆ 径向容许负载:220N (轴末端)◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器型号:EW34-260-E1000 驱动电压:24VDC 3.00 6.004.509.00Q Q U U E E ((N N ..m m ))0053106159201201.503.00SPEED(RPS)SPEED(RPS)T T O O R R 2515两相直流86mm闭环步进马达力矩曲线接线图48VDC 型号:EW34-460-E1000 驱动电压:24VDC48VDC编码器CPRC-C’ VIEWA+A-B+B-绿黑红蓝编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线特点◆ RoHS 符合品◆ 法兰尺寸:□42mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 刹车力矩0.5N .m◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号电流A/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm驱动器A+A-B+B-绿黑红蓝型号:EW17-420M-E1000 驱动电压:24VDC型号:EW17-520M-E1000 驱动电压:24VDC0.400.600.600.90Q Q U U E E ((N N ..m m ))00101020203030404000.200.30SPEED(RPS)SPEED(RPS)T T O O R R 5050两相直流42mm闭环刹车步进马达编码器力矩曲线接线图步距角degCPR编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线红 +黑 -24VDC刹车接线特点◆ RoHS 符合品◆ 法兰尺寸:□57mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 刹车力矩2N .m◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm驱动器1.00 1.401.502.10Q Q U U E E ((N N ..m m ))00101020203030404000.500.70SPEED(RPS)SPEED(RPS)T T O O R R 5050两相直流57mm闭环刹车步进马达力矩曲线接线图型号:EW23-240 驱动电压:24VDCM-E1000 48VDC型号:EW23-350 驱动电压:24VDC M-E1000 48VDC编码器CPRA+A-B+B-绿黑红蓝编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线红 +黑 -24VDC刹车接线特点◆ RoHS 符合品◆ 法兰尺寸:□60mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:15N◆ 径向容许负载:75N (轴末端)◆ 刹车力矩2N .m◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm驱动器两相直流60mm闭环刹车步进马达力矩曲线接线图型号:EW24-450M-E1000 驱动电压:24VDC2.003.00Q U E (N .m )0510152001.00SPEED(RPS)T O R 2548VDC编码器CPRA+A-B+B-绿黑红蓝编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线红 +黑 -24VDC刹车接线特点◆ RoHS 符合品◆ 法兰尺寸:□86mm ◆ 编码器:4000CPR◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:60N◆ 径向容许负载:220N (轴末端)◆ 刹车力矩5N .m◆ 匹配驱动器:EPDC-10◆ 驱动器资料参考第20规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器6.009.00Q U E (N .m )03691203.00SPEED(RPS)T O R 15两相直流86mm闭环刹车步进马达力矩曲线接线图型号:EW34-460M-E1000 驱动电压:24VDC48VDC编码器CPRA+A-B+B-绿黑红蓝编码器接线黑红蓝白蓝橙白橙GND +5V A /A B /B电机线编码器线1098765端子序号2431129101234马达接线编码器接线红 +黑 -24VDC刹车接线C-C’ VIEW特点◆ RoHS 符合品◆ 法兰尺寸:□28-86mm ◆ 导程:2mm-12mm◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 匹配驱动器:EPDO◆ 驱动器资料参考第12规格型号电流A/PHASE Ω/PHASE 电阻电感mH/PHASE导程 mm转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm驱动器外部驱动式丝杆步进马达电机尺寸步距角degmmEW11-110-T02150EW17-320-T08200外部驱动式丝杆步进马达EW23-240-T10300EW34-260-T12300型号:EW11-110-T02150 驱动电压:24VDC4060120609018000055510101015151********203060SPEED(RPS)SPEED(RPS)SPEED(RPS)252525力矩曲线型号:EW17-320-T08200 驱动电压:24VDC型号:EW23-240-T10300 驱动电压:24VDC 48VDC 4006000369120200SPEED(RPS)15型号:EW34-260-T12300 驱动电压:24VDC48VDCF O R C E (N )F O R C E (N )F O R C E (N )F O R C E (N )A+A-B+B-黑绿红蓝接线图特点◆ RoHS 符合品◆ 法兰尺寸:□28-86mm ◆ 导程:2mm-12mm◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 匹配驱动器:EPDO◆ 驱动器资料参考第12规格型号电流A/PHASE Ω/PHASE 电阻电感mH/PHASE导程 mm转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm驱动器贯通轴式丝杆步进马达电机尺寸步距角degmmEW11-110-G02200EW17-320-G04425EW23-240-G04425EW34-260-G12425型号:EW11-110-G02200 驱动电压:24VDC401002006015030000055510101015151520202002050100SPEED(RPS)SPEED(RPS)SPEED(RPS)252525力矩曲线型号:EW17-320-G04425 驱动电压:24VDC型号:EW23-240-G04425 驱动电压:24VDC 48VDC 4006000369120200SPEED(RPS)15型号:EW34-260-G12425 驱动电压:24VDC48VDCF O R C E (N )F O R C E (N )F O R C E (N )F O R C E (N)A+A-B+B-黑绿红蓝接线图贯通轴式丝杆步进马达特点◆ RoHS 符合品◆ 法兰尺寸:□28-57mm ◆ 导程:1mm-4mm◆ 长寿命:10倍于T 型丝杆◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 匹配驱动器:EPDO◆ 驱动器资料参考第12规格型号电流A/PHASE Ω/PHASE 电阻电感mH/PHASE导程 mm转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm驱动器滚珠丝杆步进马达电机尺寸步距角degmmEW11-110-B01100EW17-320-B02200EW23-240-B04200型号:EW11-110-B01100 驱动电压:24VDCSPEED(RPS)SPEED(RPS)SPEED(RPS)力矩曲线型号:EW17-320-B02200 驱动电压:24VDC 型号:EW23-240-B04200 驱动电压:24VDCF O R C E (N )F O R C E (N )F O R C E (N )A+A-B+B-黑绿红蓝接线图滚珠丝杆步进马达特点◆ RoHS 符合品◆ 法兰尺寸:□20mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 匹配驱动器:EPDO-02◆ 驱动器资料参考第12规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑绿红蓝型号:EW08-210H 驱动电压:24VDC0.020.03Q U E (N .m )01020304000.01SPEED(RPS)T O R 50两相直流20mm中空步进马达中空孔径力矩曲线接线图mm特点◆ RoHS 符合品◆ 法兰尺寸:□28mm ◆ 角度误差:±0.09°◆ 绝缘耐压:500V AC /1分钟◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH ◆ 轴向容许负载:10N◆ 径向容许负载:21N (轴末端)◆ 匹配驱动器:EPDO-02◆ 驱动器资料参考第12规格型号步距角电流degA/PHASE Ω/PHASE 电阻电感mH/PHASE保持力矩 N.m转子惯量质量kg马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-黑绿红蓝型号:EW11-110H 驱动电压:24VDC0.060.09Q U E (N .m )102030400.03SPEED(RPS)T O R 50两相直流28mm中空步进马达中空孔径力矩曲线接线图mm。
初三物理电位器知识点一、电位器的构造。
1. 电位器主要由电阻体和可移动的电刷组成。
- 电阻体是具有一定电阻值的元件,其材料通常为碳膜、金属膜等。
例如碳膜电位器,碳膜均匀地涂覆在基体上,它的电阻值是沿长度方向连续变化的。
- 电刷是与电阻体紧密接触的部分,它可以在电阻体上滑动,从而改变接入电路中的电阻值。
电刷一般由金属片或导电的弹性材料制成。
二、电位器的工作原理。
1. 电位器是通过改变接入电路中的电阻丝长度来改变电阻的。
- 当电刷在电阻体上滑动时,接入电路部分的电阻丝长度发生变化。
如果把电位器接入一个简单的串联电路,假设电源电压为U,电路中的电流I=(U)/(R_总),其中R_总=R_0 + R_pot(R_0为电路中其他电阻,R_pot为电位器接入电路的电阻)。
- 当电刷向电阻体一端滑动时,R_pot增大,根据I = (U)/(R_总),电路中的电流I减小;同时,根据U = IR,电位器两端的电压U_pot=I× R_pot,由于I减小,R_pot增大,所以U_pot的变化取决于两者的乘积。
- 反之,当电刷向电阻体另一端滑动时,R_pot减小,电路中的电流I增大,电位器两端的电压U_pot也会相应变化。
三、电位器的符号与电路图中的表示。
1. 电位器在电路图中的符号是一个长方形,在长方形的一端有一个箭头,箭头表示电刷的位置。
- 在实际的电路图中,电位器常用来调节电路中的电流、电压等物理量。
例如,在一个简单的调光电路中,电位器与灯泡串联,通过调节电位器的阻值来改变电路中的电流,从而调节灯泡的亮度。
- 当电位器与其他元件连接时,要注意连接的方式。
如果是串联,电位器阻值的变化会直接影响整个串联电路的总电阻、电流和电压分配;如果是并联,电位器阻值的变化会影响并联电路的总电阻、各支路的电流分配等。
四、电位器的应用。
1. 在音量调节中的应用。
- 在收音机、音响等设备中,电位器被广泛用于音量调节。
声音信号是一种电信号,通过改变电位器的阻值,可以改变音频放大电路的输入电压或电流,从而调节音量大小。

常用电阻阻值表精度为5%的碳膜电阻,以欧姆为单位的标称值:1.0 5.6 33 160 82 0 3.9K 20K 100K510K 2.7M1.1 6.2 36 180 91 0 4.3K 22K 110K560K 3M1.2 6.8 39 200 1K4.7K 24K 120K620K 3.3M1.3 7.5 43 220 1. 1K 5.1K 27K 130K 680K 3.6M1.5 8.2 47 240 1. 2K 5.6K 30K 150K 750K 3.9M1.6 9.1 51 270 1. 3K 6.2K 33K 160K 820K 4.3M1.8 10 56 300 1 .5K 6.6K 36K 180K 910K 4.7M2.0 11 62 330 1 .6K 7.5K 39K 200K 1M 5.1M2.2 12 68 360 1 .8K 8.2K 43K 220K1.1M 5.6M2.4 13 75 390 2 K 9.1K 47K 240K1.2M 6.2M2.7 15 82 430 2 .2K 10K 51K 270K1.3M 6.8M3.0 16 91 470 2 .4K 11K 56K 300K1.5M 7.5M3.3 18 100 510 2. 7K 12K 62K 330K1.6M 8.2M3.6 20 110 560 3K13K 68K 360K1.8M 9.1M3.9 22 120 620 3. 2K 15K 75K 390K 2M 10M4.3 24 130 680 3. 3K 16K 82K 430K2.2M 15M4.7 27 150 750 3. 6K 18K 91K 470K2.4M 22M5.1 30精度为1%的金属膜电阻,以欧姆为单位的标称值:10 33 100 3321K 3.32K 10.5K 34K 107K 357K10.2 33.2 102 340 1.0 2K 3.4K 10.7K 34.8K110K 360K10.5 34 105 348 1 .05K 3.48K 11K 35.7K 113K 365K10.7 34.8 107 350 1.0 7K 3.57K 11.3K 36K115K 374K11 35.7 110 357 1 .1K 3.6K 11.5K 36.5K 118K 383K11.3 36 113 360 1 .13K 3.65K 11.8K 37.4K120K 390K11.5 36.5 115 365 1.1 5K 3.74K 12K 38.3K121K 392K11.8 37.4 118 374 1.1 8K 3.83K 12.1K 39K124K 402K12 38.3 120 383 1 .2K 3.9K 12.4K 39.2K 127K 412K12.1 39 121 390 1 .21K 3.92K 12.7K 40.2K130K 422K12.4 39.2 124 392 1.2 4K 4.02K 13K 41.2K133K 430K12.7 40.2 127 402 1.2 7K 4.12K 13.3K 42.2K137K 432K13 41.2 130 412 1 .3K 4.22K 13.7K 43K 140K 442K13.3 42.2 133 422 1.3 3K 4.32K 14K 43.2K143K 453K13.7 43 137 430 1 .37K 4.42K 14.3K 44.2K147K 464K14 43.2 140 432 1 .4K 4.53K 14.7K 45.3K150K 470K14.3 44.2 143 442 1.4 3K 4.64K 15K 46.4K154K 475K14.7 45.3 147 453 1.4 7K 4.7K 15.4K 47K158K 487K15 46.4 150 464 1 .5K 4.75K 15.8K 47.5K160K 499K15.4 47 154 470 1 .54K 4.87K 16K 48.7K 162K 511K15.8 47.5 158 475 1.5 8K 4.99K 16.2K 49.9K165K 523K16 48.7 160 487 1 .6K 5.1K 16.5K 51K 169K 536K16.2 49.9 162 499 1.6 2K 5.11K 16.9K 51.1K174K 549K16.5 51 165 510 1 .65K 5.23K 17.4K 52.3K178K 560K16.9 51.1 169 511 1.69K 5.36K 17.8K 53.6K180K 562K17.4 52.3 174 523 1.7 4K 5.49K 18K 54.9K182K 576K17.8 53.6 178 536 1.7 8K 5.6K 18.2K 56K187K 590K18 54.9 180 549 1 .8K 5.62K 18.7K 56.2K191K 604K18.2 56 182 560 1 .82K 5.76K 19.1K 57.6K196K 619K18.7 56.2 187 562 1.8 7K 5.9K 19.6K 59K200K 620K19.1 57.6 191 565 1.9 1K 6.04K 20K 60.4K205K 634K19.6 59 196 578 1 .96K 6.19K 20.5K 61.9K210K 649K20 60.4 200 590 2 K 6.2K 21K 62K 215K 665K20.5 61.9 205 604 2.0 5K 6.34K 21.5K 63.4K220K 680K21 62 210 6192.1K 6.49K 22K 64.9K221K 681K21.5 63.4 215 620 2.1 5K 6.65K 22.1K 66.5K226K 698K22 64.9 220 634 2 .2K 6.8K 22.6K 68K 232K 715K22.1 66.5 221 649 2.2 1K 6.81K 23.2K 68.1K237K 732K22.6 68 226 665 2 .26K 6.98K 23.7K 69.8K240K 750K23.2 68.1 232 680 2.3 2K 7.15K 24K 71.5K243K 768K23.7 69.8 237 681 2.3 7 7.32K 24.3K 73.2K249K 787K24 71.5 240 698 2 .4K 7.5K 24.9K 75K 255K 806K24.3 73.2 243 715 2.4 3K 7.68K 25.5K 76.8K261K 820K24.7 75 249 732 2 .49K 7.87K 26.1K 78.7K267K 825K24.9 75.5 255 750 2.5 5K 8.06K 26.7K 80.6K270K 845K25.5 76.8 261 768 2.6 1K 8.2K 27K 82K 274K 866K26.1 78.7 267 787 2.6 7K 8.25K 27.4K 82.5K280K 887K26.7 80.6 270 806 2.7 K 8.45K 28K 84.5K287K 909K27 82 274 8202.74K 8.66K 28.7K 86.6K294K 910K27.4 82.5 280 825 2.8 K 8.8K 29.4K 88.7K300K 931K28 84.5 287 845 2 .87K 8.87K 30K 90.9K 301K 953K28.7 86.6 294 866 2.9 4K 9.09K 30.1K 91K309K 976K29.4 88.7 300 887 3.0 K 9.1K 30.9K 93.1K316K 1.0M30 90.9 301 909 3 .01K 9.31K 31.6K 95.3K324K 1.5M30.1 91 309 910 3 .09K 9.53K 32.4K 97.6K330K 2.2M30.9 93.1 316 931 3.1 6K 9.76K 33K 100K332K31.6 95.3 324 953 3.2 4K 10K 33.2K 102K340K电阻本身的阻值常用的有161种1,1.1,1.2,1.3,1.5,1.6,1.82,2.2,2.4,2.7,3,3.3,3.6,3.94.3,4.75.1,5.66.2,6.87.58.29.110,11,12,13,15,16,1820,22,24,2730,33,36,3943,4751,5662,687582,81100,110,120,130,150 ,160,180 200,220,240,270300,330,360,390430,470510,560620,6807508209101K,1.1K,1.2K,1.3K,1.5K,1.6K,1.8K 2K,2.2K,2.4K,2.7K3K,3.3K,3.6K,3.9K4.3K,4.7K5.1K,5.6K6.2K,6.8K,7.5K8.2K9.1K10K,11K,12K,13K,15K,16K,18K20K,22K,24K,27K30K,33K,36K,39K43K,47K51K,56K62K,68K75K82K91K100K,110K,120K,130K,150K,160K,180K200K,220K,240K,270K,300K,330K,360K,390K430K,470K510K,560K620K,680K750K,820K910K1M,1.1M,1.2M,1.3M,1.5M,1.6M,1.8M2M,2.2M,2.4M,2.7M3M,3.3M,3.6M,3.9M4.4M,4.7M几种常用电位器型号与规格1.有机实芯电位器由导电材料与有机填料、热固性树脂配制成电阻粉,经过热压,在基座上形成实芯电阻体。
电位器1、概论:用于分压的可变电阻器。
在裸露的电阻体上,紧压着一至两个可移金属触点。
触点位臵确定电阻体任一端与触点间的阻值。
按输出与输入电压比与旋转角度的关系分直线式电位器(呈线性关系)、函数电位器(呈曲线关系)。
主要参数为阻值、容差、额定功率。
2、用途:广泛用于电子设备,在音响和接收机中作音量控制用。
3、结构:电位器是一种可调的电子元件。
它是由一个电阻体和一个转动或滑动系统组成。
当电阻体的两个固定触电之间外加一个电压时,通过转动或滑动系统改变触点在电阻体上的位臵,在动触点与固定触点之间便可得到一个与动触点位臵成一定关系的电压。
它大多是用作分压器,这是电位器是一个四端元件。
电位器基本上就是滑动变阻器,有几种样式,一般用在音像音量开关和激光头/玩具/功率大小调节电位器是一种可调的电子元件。
它是由一个电阻体和一个转动或滑动系统组成。
当电阻体的两个固定触电之间外加一个电压时,通过转动或滑动系统改变触点在电阻体上的位臵,在动触点与固定触点之间便可得到一个与动触点位臵成一定关系的电压。
4、功能:电位器的作用——调节电压(含直流电压与信号电压)和电流的大小。
5、电位器的结构特点——电位器的电阻体有两个固定端,通过手动调节转轴或滑柄,改变动触点在电阻体上的位臵,则改变了动触点与任一个固定端之间的电阻值,从而改变了电压与电流的大小。
6、性能:6.1 电位器的电气性能:A、全阻值(行业俗称总阻) :通常是指电位器上标注的电阻值,它等于电阻体两个固定端之间的电阻值。
其单位有欧姆(Ω),千欧(KΩ),兆欧(MΩ),业内基本以欧姆为单位;表达方式:例B10K意为阻抗变化特性为B线型10000Ω(K代表千或000)。
规格承认书都有允许误差范围。
实测阻值与标称阻值误差范围根据不同精度要求可允许±20%。
±10%。
甚至±5%的误差(但会影响单价)。
精密电位器(如绕线式即多圈式)的精度可达±0.1%。
上海安浦鸣志自动化设备有限公司STM23R集成式步进电机用户手册目录1 产品介绍 (4)1.1 概述 (4)1.2 特性 (4)1.3 功能框图 (5)1.4 安全须知 (6)2 开始前的准备 (7)2.1 安装硬件 (7)2.2 选择合适的电源 (7)2.2.1 选择电源电压 (7)2.2.2 选择电源电流 (9)3 安装及接线 (12)3.1 连接电源 (12)3.2 连接输入 & 输出 (13)3.2.1 连接引脚图 (13)3.2.2 脉冲方向输入 (13)3.2.3 使能输入 (14)3.2.4 报警输出 (15)4 开关选择 (17)4.1 运行电流 (17)4.2 空闲电流 (17)4.3 自测模式 (18)4.4 数字信号滤波 (18)4.5 细分插补技术 (18)4.6 抗共振 (19)4.7 步进脉冲类型 (19)4.8 细分设置 (20)5 错误代码 (21)6 参考资料 (22)6.1 机械尺寸 (22)6.2 技术规格 (23)6.3 力矩曲线 (24)6.4 散热 (25)7 联系MOONS’ (27)本用户手册所述内容仅适用于以下机型:1 产品介绍感谢您选择鸣志STM23R集成式电机产品。
希望我们产品优越的性能、优异的质量和优秀的性价比可以帮助您成功的完成运动控制项目。
1.1 概述STM23R系列是基于PID电流控制算法设计的高性能、细分型步进电机和驱动器集成化产品,具有优越的性能表现,高速大力矩输出,低噪音,低振动,许多配置参数为拨码开关可选。
希望我们产品优越的性能、优异的质量和优秀的性价比可以帮助您成功的完成运动控制项目。
1.2 特性•供电电源 12 - 70V的直流电源•输出电流拨码开关设定,4种开关选择,最大5A•输出力矩 STM23R-2 最大可达 0.9 N.mSTM23R-3 最大可达 1.5 N.m•输入 & 输出 3 路光电隔离数字输入,5 -24V1 路光电隔离数字输出,30V 100mA•电流控制先进的数字电流控制提供卓越的高速力矩,4位开关选择设置分别为设定最大电流的50%,70%,90%,100%•速度范围最高可达60rps•空闲电流拨码开关选择,在电机停止运行后1.0秒电流会自动减为额定电流的 50%或90%•自测模式电机以1转每秒的速度做正反转往复运动,拨码开关选择,ON时启用,OFF时关闭•数字信号滤波有效滤出信号输入时的噪音。
常见元器件电位器的分类、参数及测量介绍电位器是可变电阻的一种,通常是由电阻体与转动或滑动系统组成,即靠一个动触点在电阻体上移动,获得部分电压输出。
下面小编为大家讲解一下关于电位器的一些常识。
电位器的分类按其电阻体所需的不同材料,电位器可以分为碳膜电位器、金属膜电位器、碳质实心电位器、有机实心电位器、线绕电位器、玻璃釉电位器等。
按其结构的不同,电位器可分为单圈、多圈电位器,单联、双联同轴电位器,带开关电位器,锁紧和非锁紧型电位器。
按调节方式又分为旋转式电位器、直滑式电位器。
常用电位器如图所示。
电位器的参数电位器的主要参数有标称阻值、额定功率、分辨率、滑动噪声、阻值变化特性、耐磨性、零位电阻及温度系数等。
除了与电阻器的参数相同外,还有以下一些参数。
1.阻值的变化形式电位器在调节时根据其阻值随触点变化的规律分为直线式电位器、指数式电位器、对数式电位器三种。
(1)直线式电位器的阻值随滑动端的运动作线性、均匀变化。
它一般用字符“X”表示,适用于分压、偏流的调整等。
(2)对数式电位器的阻值随滑动端的运动作对数规律变化。
它一般用字符“D”表示,适用于收音机、音响等的音调控制。
(3)指数式电位器的阻值随滑动端的运动作指数规律变化。
它一般用字符“Z”表示,适用于收音机、音响等的音量控制。
2.动态噪声由于电阻休阻值分布的不均匀性和滑动触点接触电阻的存在,电位器的滑动臂在电阻体移动时产生噪声。
这种噪声对电子设备将产生不良影响。
常用的电位器有,WT系列碳膜电位器、WH系列合成膜电位器、WS系列有机实芯电位器、WTH—1、2系列微调玻璃釉电位器、WH173小型直滑碳膜电阻器、WXD系列线绕电位器等。
电位器的测量1.电位器标称阻值测量电位器有3个引线片:两个端片和一个中心抽头触片。
测量其标称阻值时,选择万用表欧姆挡适当量程,将万用表两表笔搭在电位器两端片上,万用表指针所指的电阻数值即为电位器的标称阻值。
2.性能测量性能测量主要测量电位器的中心抽头触片与电阻体接触是否良好。
50k步进电位器设计制作(级进式电位器)假如,音量电位器的作用仅仅为调节音量,问题就简单多了。
但事实上,音量电位器是信号必经之路。
它的重要性往往被低估。
一直以来,音响科技都致力于创造零失真的元件,但在现实中这是个梦想。
我们所追求的,其实是最低程度的妥协。
音量电位器可选择一般的电位器,如ALPS.Noble等等。
或者买一个瑞士Elma架,加上0.1%Holco精密电阻组成级进式电位器(有钱人的选择,此电位器两千大洋一只),或者自己做一个级进式的音量开关.前者的优点是购买容易,但是一般数十元的市售产品, 音质都不是非常理想,两声道的误差通常也不小,似乎不合乎HI-FI的精神;若是购买高级品,价格则相当的高昂. 后者是以一个多段的波段开关(通常是25段以上),焊上不同阻值的电阻,摹拟电位器的动作,好处是两声道的误差非常小,且使用越高级的电阻时, 相对的,音质也就越好,缺点是多段的波段开关不容易买到,且品质好的,价格亦不便宜;用一段时间后,接点容易氧化,产生杂音。
最好是全密封的波段开关。
图1(单位是Ω,由上图可看出此电位器的电阻是串联的(简称为串阻级进式电位器),其噪声也是拥模以谛∫袅渴毙藕啪?5个电阻。
)图1中是一個25段的波段开关,若是买不到(或嫌太贵),可以用六段的波段开关代替,衰减电阻的计算请参考下图2中公式.图2最好的音量电位器是如下图3的级进式电位器所示的一样各位可以看出音频信号只须经过两枚电阻就可完成音量的调节,使信号的影响减至最少,它的输入输出阻抗为恒定的,但其缺点从图可以看出它要求要一个四刀的24位的波段开关。
..............共24个。
图3市售的碳膜、金属膜、金属氧化膜...等等的可变电阻(Variable Resistor,以下简称VR),如果用在控制两声道以上的音量时,必须使用双层以上的结构,然而,因VR制造及机械精度等种种因素而影响到每一层之间的误差,曾经用用市售10KA碳膜做过实验,在旋到其中一层的5K位置时,测量另一层的阻值却为4.2K,这种误差带来的就是两声道音量的不平衡,听感上可能导致乐器定位偏移、音像涣散等等后果。
50k步进电位器设计制作(级进式电位器)假如,音量电位器的作用仅仅为调节音量,问题就简单多了。
但事实上,音量电位器是信号必经之路。
它的重要性往往被低估。
一直以来,音响科技都致力于创造零失真的元件,但在现实中这是个梦想。
我们所追求的,其实是最低程度的妥协。
音量电位器可选择一般的电位器,如ALPS.Noble等等。
或者买一个瑞士Elma架,加上0.1%Holco精密电阻组成级进式电位器(有钱人的选择,此电位器两千大洋一只),或者自己做一个级进式的音量开关.前者的优点是购买容易,但是一般数十元的市售产品, 音质都不是非常理想,两声道的误差通常也不小,似乎不合乎HI-FI的精神;若是购买高级品,价格则相当的高昂. 后者是以一个多段的波段开关(通常是25段以上),焊上不同阻值的电阻,摹拟电位器的动作,好处是两声道的误差非常小,且使用越高级的电阻时, 相对的,音质也就越好,缺点是多段的波段开关不容易买到,且品质好的,价格亦不便宜;用一段时间后,接点容易氧化,产生杂音。
最好是全密封的波段开关。
图1(单位是Ω,由上图可看出此电位器的电阻是串联的(简称为串阻级进式电位器),其噪声也是拥模以谛∫袅渴毙藕啪?5个电阻。
)图1中是一個25段的波段开关,若是买不到(或嫌太贵),可以用六段的波段开关代替,衰减电阻的计算请参考下图2中公式.图2最好的音量电位器是如下图3的级进式电位器所示的一样各位可以看出音频信号只须经过两枚电阻就可完成音量的调节,使信号的影响减至最少,它的输入输出阻抗为恒定的,但其缺点从图可以看出它要求要一个四刀的24位的波段开关。
..............共24个。
图3市售的碳膜、金属膜、金属氧化膜...等等的可变电阻(Variable Resistor,以下简称VR),如果用在控制两声道以上的音量时,必须使用双层以上的结构,然而,因VR制造及机械精度等种种因素而影响到每一层之间的误差,曾经用用市售10KA碳膜做过实验,在旋到其中一层的5K位置时,测量另一层的阻值却为4.2K,这种误差带来的就是两声道音量的不平衡,听感上可能导致乐器定位偏移、音像涣散等等后果。
步进电位器原理
步进电位器是一种可调节电阻的元件,它的原理是通过改变接触点的位置来改变电阻的数值。
这种元件常用于电子电路中,用于调节电流或电压的大小。
步进电位器由一个可旋转的轴和一系列固定的导电材料组成。
轴上有一个或多个金属接触点,它们可以与固定的导电材料接触。
当轴旋转时,接触点会从一个固定导电材料跳跃到另一个固定导电材料上,从而改变电阻的数值。
步进电位器的工作原理可以理解为一个电阻器的多个部分串联在一起。
每个部分的电阻值是固定的,当接触点与某个部分接触时,这个部分的电阻就会起作用,而其他部分的电阻则不起作用。
通过旋转轴,可以使接触点依次与不同的部分接触,从而调节电阻的数值。
步进电位器的调节范围取决于其固定导电材料的数量和电阻值。
通常,步进电位器具有固定和可变两种类型。
固定型的步进电位器的固定导电材料的电阻值是固定的,而可变型的步进电位器可以通过旋转轴调节电阻的数值。
步进电位器在电子电路中有广泛的应用。
它可以用于调节电源的电压或电流,从而控制电路的工作状态。
此外,步进电位器还可以用于模拟信号处理、音量调节、温度控制等方面。
步进电位器是一种通过改变接触点位置来调节电阻数值的元件。
它
的工作原理是通过旋转轴使接触点与不同的固定导电材料接触,从而改变电阻的数值。
步进电位器在电子电路中有广泛的应用,可以用于调节电源的电压或电流,控制电路的工作状态。
关于2X23档步进音量开关(电位器)制作补充说明
1.将步进开关轴柄指向自己并逆时针方向旋转至终端,再将定位插杆置于上方,这时步进开关左边固定螺丝的右侧焊接片即为步进开关0端起始接点。
顺时针方向依次为1端、2端……22端。
(即步进开关左边固定螺丝的左侧焊接片为终端焊接片)
2.再将步进开关中两组多余动接点片按图所示依次按例或剪断(否则将影响衰耗电阻的安装),只保留与0端和23端相近的一接点焊片作为滑动臂引出端。
也可根据实际需要在一圈动接点中任意选择某一接点焊片作为滑动臂引出端。
3.按照《无线电与电视》96年第7期22页上的表1或表2中“每档阻值”所示各电阻值排列,从0端接点焊片开始,与1端接点焊片之间焊上第一个电阻;1端与2端接点焊片间焊上第二个电阻;……;依次类推,使两层各焊上22个电阻。
装焊时最好上、下层(左右)声道同一阻值同时焊接,焊完一组用万用表复测一下,由于步进式音量控制器的电阻值是串联总和,所以待全部焊完后再测0端到23端之间的总阻值是否符合要求。
4.可采用一字排列方式。
也可采用上、下位交错排列。
5.将电阻安装完毕的步进式音量控制器接入电路,先要确认区分出信号输入、输出、接地三个位置,由于是立体声双声道,自然就有六个接线端。
其中动接点是信号输出端,接小阻值末端是接地端,而接大阻值的终端是信号输入端。
2X23档步进开关配电阻阻值。