状态反馈极点配置基本理论与方法
- 格式:docx
- 大小:252.97 KB
- 文档页数:6
第2章 状态反馈极点配置设计基本理论引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
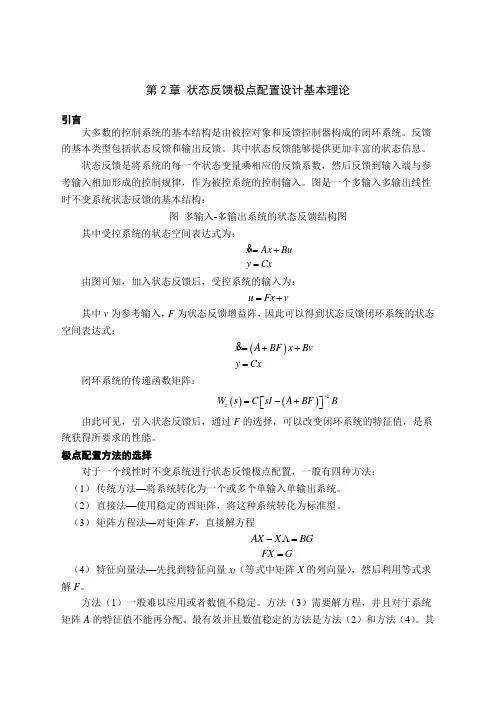
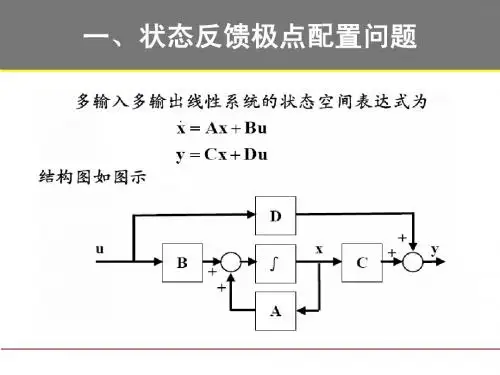
图是一个多输入多输出线性时不变系统状态反馈的基本结构:图 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:xAx Bu y Cx=+=&由图可知,加入状态反馈后,受控系统的输入为:u Fx v =+其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++=&闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3) 矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ=FX G =(4) 特征向量法—先找到特征向量x j (等式中矩阵X 的列向量),然后利用等式求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
本文结合以上方法提出了一种新的设计方法:首先通过酉变换将状态方程化为一种控制规范形,然后利用最小二乘法解方程的得到最佳的状态反馈矩阵。

状态反馈极点配置基本理论与方法IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】第2章 状态反馈极点配置设计基本理论引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
图是一个多输入多输出线性时不变系统状态反馈的基本结构:图 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:x Ax Buy Cx=+=由图可知,加入状态反馈后,受控系统的输入为:u Fx v =+其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++=闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3)矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ=FX G =(4)特征向量法—先找到特征向量x j (等式中矩阵X 的列向量),然后利用等式求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
本文结合以上方法提出了一种新的设计方法:首先通过酉变换将状态方程化为一种控制规范形,然后利用最小二乘法解方程的得到最佳的状态反馈矩阵。
东南大学自动化学院实验报告课程名称:自动控制基础实验名称:控制系统极点的任意配置院(系):自动化学院专业:自动化姓名:吴静学号:08008419实验室:实验组别:同组人员:实验时间:2011年4月29日评定成绩:审阅教师:一、实验目的1. 掌握用状态反馈的设计方法实现控制系统极点的任意配置;2. 用电路模拟的方法,研究参数的变化对系统性二、实验原理内容用全状态反馈实现二阶系统极点的任意配置,并用电路模拟的方法予予以实现; 理论证明,通过状态反馈的系统,其动态性能一定会优于只有输出反馈的系统。
设系统受控系统的动态方程为bu Ax x+= cx y =图6-1为其状态变量图。
图6-1 状态变量图令Kx r u -=,其中]...[21n k k k K =,r 为系统的给定量,x 为1⨯n 系统状态变量,u 为11⨯控制量。
则引入状态反馈后系统的状态方程变为bu x bK A x+-=)( 相应的特征多项式为)](det[bK A SI --,调节状态反馈阵K 的元素]...[21n k k k ,就能实现闭环系统极点的任意配置。
图6-2为引入状态反馈后系统的方框图。
图6-2 引入状态变量后系统的方框图实验时,二阶系统方框图如6-3所示。
图6-3 二阶系统的方框图引入状态反馈后系统的方框图如图6-4所示。
根据状态反馈后的性能指标:20.0≤p δ,s 5.0T p ≤,试确定状态反馈系数K1和K2图6-4 引入状态反馈后的二阶系统方框图三、实验步骤1.引入状态反馈前根据图6-3二阶系统的方框图,设计并组建该系统相应的模拟电路,如图6-9所示。
图6-9 引入状态反馈前的二阶系统模拟电路图在系统输入端加单位阶跃信号,用上位机软件观测c(t)输出点并记录相应的实验曲线,测量其超调量和过渡时间。
2.引入状态反馈后请预先根据前面给出的指标计算出状态反馈系数K1、K2。
根据图6-4引入状态反馈后的二阶系统的方框图,设计并组建该系统相应的模拟电路,如图6-10所示。

现代控制理论实验(一)线性系统的状态反馈及极点配置——09级自动化本科一.实验目的1.了解和掌握状态反馈及极点配置的原理。
2.了解和掌握利用矩阵法及传递函数法计算状态反馈及极点配置的原理与方法。
3.掌握在被控系统中如何进行状态反馈及极点配置,构建一个性能满足指标要求的新系统的方法。
二.实验原理及说明一个控制系统的性能是否满足要求,要通过解的特征来评价,也就是说,当传递函数是有理函数时,它的全部信息几乎都集中表现为它的极点、零点及传递函数。
因此若被控系统完全能控,则可以通过状态反馈任意配置极点,使被控系统达到期望的时域性能指标。
若有被控系统如图3-3-61所示,它是一个Ⅰ型二阶闭环系统。
图3-3-61 被控系统如图3-3-61所示的被控系统的传递函数为:12021S 11)1(1)(a S a S b T TS T TS S T S i i i ++=++=++=φ (3-3-51) 采用零极点表达式为:))(()(210λλφ--=S S b S (3-3-52)进行状态反馈后,如图3-3-62所示,图中“输入增益阵”L 是用来满足静态要求。
图3-3-62 状态反馈后被控系统设状态反馈后零极点表达式为:))(()(21**--=λλφS S b S (3-3-53)1.矩阵法计算状态反馈及极点配置1)被控系统被控系统状态系统变量图见图3-3-63。
图3-3-63 被控系统状态系统变量状态反馈后的被控系统状态系统变量图见图3-3-64。
图3-3-64 状态反馈后的被控系统状态系统变量图图3-3-61的被控系统的状态方程和输出方程为:状态方程:⎪⎪⎪⎩⎪⎪⎪⎨⎧=+-=+-=••1i 1i 2211X Y u T 1X T 1X X T 1X T 1X (3-3-54)⎪⎩⎪⎨⎧=+==•∑CxY u Ax X B C B A 0),,(式中[]01,T 10B 0T 1T 1T 1A ,i i 21=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡=C x x x , 被控系统的特征多项式和传递函数分别为:12010a a b S b )(+++=S S S φB A)C(SI 1--=)(A -SI det a a )(f 0120=++=S S S 可通过如下变换(设P 为能控标准型变换矩阵): —x P X =将∑0C B A ),,(化为能控标准型 ),,(————C B A ∑,即: ⎪⎩⎪⎨⎧=+=•——————x C Y u x A B X 式中 ⎥⎦⎤⎢⎣⎡-==-101a -a 10AP P A — , ⎥⎦⎤⎢⎣⎡==-10B P B 1— , []10b b CP C ==— 2)被控系统针对能控标准型),,(————C B A ∑引入状态反馈:⎥⎦⎤⎢⎣⎡=-=—————式中10k k k xk u ν (3-3-55)可求得对—x 的闭环系统),,—————C B k B A (-∑的状态空间表达式: 仍为能控标准型,即: ⎪⎩⎪⎨⎧=+-=•————————)(x C Y u x B k B A X 式中 ⎥⎦⎤⎢⎣⎡+-+-=-)()(—————1100k a k a 10k B A则闭环系统),,(——————C B k B A -∑的特征多项式和传递函数分别为: )()(—————00112k k a k a k)B (A SI det )(f ++++=⎥⎦⎤⎢⎣⎡--=S S S )k a (k a b S b B )k B A (SI C )(00112011k ———————)(+++++=⎥⎦⎤⎢⎣⎡--=-S S S φ3)被控系统如图3-3-61所示:其中:05.01==T T i则其被控系统的状态方程和输出方程为:[]XY uX X 0110012020=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=期望性能指标为:超调量M P ≤20%;峰值时间t P ≤0.5秒。
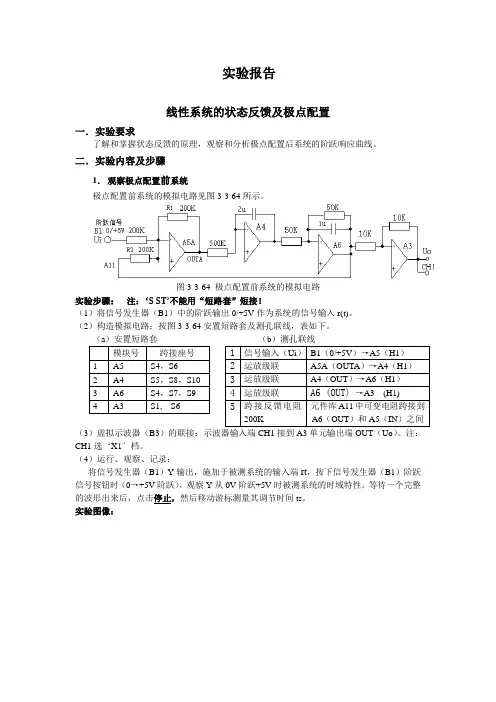
实验报告线性系统的状态反馈及极点配置一.实验要求了解和掌握状态反馈的原理,观察和分析极点配置后系统的阶跃响应曲线。
二.实验内容及步骤1.观察极点配置前系统极点配置前系统的模拟电路见图3-3-64所示。
图3-3-64 极点配置前系统的模拟电路实验步骤:注:‘S ST’不能用“短路套”短接!(1)将信号发生器(B1)中的阶跃输出0/+5V作为系统的信号输入r(t)。
(2)构造模拟电路:按图3-3-64安置短路套及测孔联线,表如下。
(3)虚拟示波器(B3)的联接:示波器输入端CH1接到A3单元输出端OUT(Uo)。
注:CH1选‘X1’档。
(4)运行、观察、记录:将信号发生器(B1)Y输出,施加于被测系统的输入端rt,按下信号发生器(B1)阶跃信号按钮时(0→+5V阶跃),观察Y从0V阶跃+5V时被测系统的时域特性。
等待一个完整的波形出来后,点击停止,然后移动游标测量其调节时间ts。
实验图像:由图得ts=3.880s 2.观察极点配置后系统 极点的计算:受控系统如图所示,若受控系统完全可控,则通过状态反馈可以任意配置极点。
受控系统设期望性能指标为:超调量M P ≤5%;峰值时间t P ≤0.5秒。
由1095.01t 707.0%5eM n n 2n p 1/p 2=≥⇒≤-==⇒≤=--ωωζωπζζζπ取因此,根据性能指标确定系统希望极点为:⎪⎩⎪⎨⎧--=+-=07.707.707.707.7*2*1j j λλ受控系统的状态方程和输出方程为:⎪⎩⎪⎨⎧=+=-----⋅-xC y b x A x μ式中][01,10,020120,21=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡=----C b A x x x系统的传递函数为:202020a S a S βS β)(2012010++=+++=S S S G受控制系统的可控规范形为:[][]020T C C b T b a a T A T A X T X X C Y U b X A X K K i o K K KK k K K K ===⎥⎦⎤⎢⎣⎡==⎥⎦⎤-⎢⎣⎡-=⎥⎦⎤-⎢⎣⎡-===⎩⎨⎧=+=---10111,1020120010T ββ为变换阵),(式中当引入状态反馈阵K K =[K 0K 1]后,闭环系统()K K K K K C b K b A ,,-的传递函数为:()()()01201120120)20(20)(K S K S K a S K a S S S G o ++++=+++++=ββ而希望的闭环系统特征多项为:1001.14))(()(2*2*1**12*++=--=++=S S S S a S a S S f oλλ 令G K (S)的分母等于F #(S),则得到K K 为:[][]9.58010-==K K K k最后确定原受控系统的状态反馈阵K :由于 1-=T K K k求得和===---111,T C b T b T A T A K k K求得 ⎥⎥⎦⎤⎢⎢⎣⎡-=-1102011T所以状态反馈阵为: [][]9.59.91102019.580-=⎥⎥⎦⎤⎢⎢⎣⎡--=K极点配置系统如图所示:极点配置后系统根据极点配置后系统设计的模拟电路见下图所示。
线性系统的状态反馈及极点配置1.前言随着现代控制理论的不断发展和成熟,线性系统的状态反馈控制在控制理论中得到了广泛的应用,并成为了控制领域中重要的一种控制方法。
状态反馈控制能够将系统的状态进行反馈,并利用反馈得到的信息对系统进行控制,从而达到使系统达到预期控制目标的目的。
本文将从状态反馈控制的原理和实现方法两方面介绍线性系统的状态反馈及极点配置。
2.状态反馈控制的原理状态反馈控制是建立在现代控制理论的基础上的一种高级控制方法。
状态反馈控制的基本思想是在系统中引入反馈环节,设计一个反馈控制器,将系统的状态量反馈给控制器,控制器再根据反馈信号输出控制量,以期望控制系统按照预期的运动轨迹运行。
因此,状态反馈控制要实现以下两个步骤:- 系统状态量的测量:首先要在系统中安装测量传感器,实时地测量系统状态量,使得状态量可以被反馈到控制器中。
- 反馈控制器的设计:设计一个反馈控制器,将系统的状态量反馈给控制器,控制器再根据反馈信号输出控制量,实现对系统的精确控制。
因此,状态反馈控制的基本原理就是将系统状态量反馈到控制器中,以期望控制系统按照预期的运动轨迹运行。
2.2 状态空间模型与状态反馈控制状态空间模型是状态反馈控制的基础。
状态空间模型是一种方便描述线性系统动态行为和控制器的模型。
对于线性时不变系统,我们可以用如下的状态变量描述:x(t) = [x1(t),x2(t),...,xn(t)]T其中,x(t) 是系统在时刻 t 的状态量,n 是状态量的数量,x1(t),x2(t),...,xn(t) 分别是系统的每个状态量。
状态空间模型可以用一组线性常微分方程描述:dx/dt = Ax + Bu其中,A 是系统的状态方程矩阵,B 是输入矩阵,C 是输出矩阵,D 是直接耦合矩阵。
系统的状态反馈控制可以表示为:u(t) = -Kx(t)其中,K 是状态反馈矩阵。
将状态反馈控制引入到状态空间模型中,可以得到控制器的状态空间模型为:y = Cx上述控制器的状态空间模型就是一个闭环系统,通过反馈控制器将系统状态返回到系统,形成了一个反馈环。
实验报告课程线性系统理论基础实验日期2016 年月日专业班级姓名学号同组人实验名称状态反馈极点配制方法的研究评分批阅教师签字一、实验目的1.掌握状态反馈系统的极点配置;2.研究不同配置对系统动态特性的影响。
二、实验内容原系统如图3—2所示。
图中,X1和X2是可以测量的状态变量.图3-2 系统结构图试设计状态反馈矩阵,使系统加入状态反馈后其动态性能指标满足给定的要求:(1) 已知:K=10,T=1秒,要求加入状态反馈后系统的动态性能指标为:σ%≤20%,ts≤1秒.(12) 已知:K=1,T=0。
05秒,要求加入状态反馈后系统的动态性能指标为:σ%≤5%,ts≤0.5秒。
状态反馈后的系统,如图3-3所示:图3—3 状态反馈后系统结构图分别观测状态反馈前后两个系统的阶跃响应曲线,并检验系统的动态性能指标是否满足设计要求。
三、实验环境 MATLAB R2015B四、实验原理(或程序框图)及步骤 (1)实验原理一个受控系统只要其状态是完全能控的,则闭环系统的极点可以任意配置。
极点配置有两种方法:①采用变换矩阵T ,将状态方程转换成可控标准型,然后将期望的特征方程和加入状态反馈增益矩阵K 后的特征方程比较,令对应项的系数相等,从而决定状态反馈增益矩阵K;②基于Carlay-Hamilton 理论,它指出矩阵状态矩阵A 满足自身的特征方程,改变矩阵特征多项式)(A 的值,可以推出增益矩阵K ,这种方法推出增益矩阵K 的方程式叫Ackermann 公式。
五、程序源代码(1)num=[10];den=[1 1 10];[A,B,C,D]=tf2ss(num,den);p=eig(A)'P=[-3+sqrt(—142)/2;-3—sqrt(—142)/2;] K=place(A,B,P)p=eig(A—B*K)'sysnew=ss(A-B*K,B,C,D)step(sysnew/dcgain(sysnew))title('极点配置后系统阶跃响应’)num=[10];den=[1 1 10];[A,B,C,D]=tf2ss(num,den);step(A,B,C,D)title('极点配置前系统的阶跃响应’)(2)num=[1];den=[1 1 0.5];[A,B,C,D]=tf2ss(num,den);p=eig(A)’P=[—6+sqrt(-36);-6-sqrt(—36);]K=place(A,B,P)p=eig(A-B*K)'sysnew=ss(A—B*K,B,C,D)step(sysnew/dcgain(sysnew))title('极点配置后系统的阶跃响应’)num=[1];den=[1 1 0。
第2章 状态反馈极点配置设计基本理论2.1引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
图2.1是一个多输入多输出线性时不变系统状态反馈的基本结构:图2.1 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:x Ax Buy Cx=+= (2.1)由图2.1可知,加入状态反馈后,受控系统的输入为:u Fx v =+ (2.2)其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++= (2.3)闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦ (2.4)由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
2.2极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3) 矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ= (2.5a) FX G = (2.5b)(4) 特征向量法—先找到特征向量x j (等式(2.5)中矩阵X 的列向量),然后利用等式(2.5b)求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解(2.5a)方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
第2章 状态反馈极点配置设计基本理论2.1引言大多数的控制系统的基本结构是由被控对象和反馈控制器构成的闭环系统。
反馈的基本类型包括状态反馈和输出反馈。
其中状态反馈能够提供更加丰富的状态信息。
状态反馈是将系统的每一个状态变量乘相应的反馈系数,然后反馈到输入端与参考输入相加形成的控制规律,作为被控系统的控制输入。
图2.1是一个多输入多输出线性时不变系统状态反馈的基本结构:图2.1 多输入-多输出系统的状态反馈结构图其中受控系统的状态空间表达式为:x Ax Buy Cx=+= (2.1)由图2.1可知,加入状态反馈后,受控系统的输入为:u Fx v =+ (2.2)其中v 为参考输入,F 为状态反馈增益阵,因此可以得到状态反馈闭环系统的状态空间表达式:()x A BF x Bv y Cx=++= (2.3)闭环系统的传递函数矩阵:()()1s W s C sI A BF B -=-+⎡⎤⎣⎦ (2.4)由此可见,引入状态反馈后,通过F 的选择,可以改变闭环系统的特征值,是系统获得所要求的性能。
2.2极点配置方法的选择对于一个线性时不变系统进行状态反馈极点配置,一般有四种方法: (1) 传统方法—将系统转化为一个或多个单输入单输出系统。
(2) 直接法—使用稳定的酉矩阵,将这种系统转化为标准型。
(3) 矩阵方程法—对矩阵F ,直接解方程AX X BG -Λ= (2.5a)FX G = (2.5b)(4) 特征向量法—先找到特征向量x j (等式(2.5)中矩阵X 的列向量),然后利用等式(2.5b)求解F 。
方法(1)一般难以应用或者数值不稳定。
方法(3)需要解(2.5a)方程,并且对于系统矩阵A 的特征值不能再分配。
最有效并且数值稳定的方法是方法(2)和方法(4)。
其中方法(4)通过使用一系列的迭代算法找到最优解,所以比较复杂。
对于方法(2),当系统的输入多于一个信号输入时,不能确定系统的鲁棒性。
本文结合以上方法提出了一种新的设计方法:首先通过酉变换将状态方程化为一种控制规范形,然后利用最小二乘法解方程(2.5)的得到最佳的状态反馈矩阵。
2.3状态方程的规范形将线性时不变多变量完全能控系统记为:x Ax Bu =+ (2.6)其中x 和u 分别是n 维和m 维的实向量,A 和B 是合适阶次的恒定实矩阵。
极点配置是要求找到一个实反馈矩阵F ,使闭环系统矩阵A+BF 的特征值等于L ={λ1,…,λn },L 是一个复共轭的集合。
已知如果方程(2.6)定义的系统是完全能控的,就可以进行极点配置。
极点配置问题转化为寻找矩阵X 和G ,使等式(2.5a)中的矩阵Λ满足ρ(Λ)=L 。
如果X 是可逆的,根据方程(2.5b)求解F 。
方程(2.5a)可以转化为等价的形式:T T T T T P AP P XQ P XQ Q Q P B GQ ⋅-⋅Λ=⋅ (2.7)其中P 和Q 是正交矩阵,(⋅)T 表示转置,使用正交矩阵可以保证方程(2.5a)的数值稳定性不变。
选择P 使(A ,B)可以转换为:()11121,11,21,11,,1,2,1,00000T Tk k k k k k k k k k k kk A A P AP P B A A A A A A A A B ------⎛⎫ ⎪⎪⎪=⎪ ⎪ ⎪⎝⎭(2.8) 此外,非对角线上的块A i,i+1选择满秩的下三角型:(),10000*00*****00i i A +⨯⎛⎫⎪⨯ ⎪⎪⨯=⎪ ⎪ ⎪ ⎪ ⎪⨯⎝⎭(2.9) 假定方程(2.6)表示的系统为完全能控型,×表示非零的数,∗表示任意值。
对于任意给定矩阵Λ,找到Q 使它转化成Schur 型,在上三角矩阵Q T ΛQ 的对角线上存在2*2的块,表示L 的特征值中复共轭的部分。
如果L 中所有的特征值都是实数,Q T ΛQ 将是严格的上三角矩阵,而且特征值λi 都在对角线上。
因此如果期望的特征值全为实数,那么Λ是实Schur 矩阵,就不需要寻找矩阵Q 。
已知在方程(2.7)中的T X P X =和G ,特征向量矩阵X 可以从下面式子得到:X PX = (2.10)F 可以由(2.5b)得到,或者:FPX G = (2.11)2.4实数极点的配置对于方程(2.5),如果假设矩阵A 和B 已经转换成为标准形式,并且期望的闭环特征值全为实数,即Λ是实Schur 矩阵。
需要寻找非奇异矩阵X ,使方程(2.5a)满足矩阵G 。
假设X 的形式如下:100*1*1****1X ⎛⎫ ⎪ ⎪ ⎪=⎪ ⎪ ⎪ ⎪ ⎪⎝⎭(2.12) 显然矩阵X 满秩,而且满足下三角是标准的最小化。
假设所有的特征值λi 都是实数,将第j 列的X 、Λ、G 表示为:01,,0j j j j z g x λ⎛⎫⎛⎫⎪ ⎪⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭ (2.13) M j1:j2表示矩阵M 的第j 1到j 2列,M j 表示M 的第j 列。
利用(2.13)可以证明,存在矩阵X 满足等式(2.12)。
j 为不同值时,等式(2.5a)可以表示为不同形式: 当1j =时:()()1112:11nx A B A g λλ⎛⎫⎡⎤-=- ⎪⎣⎦⎝⎭(2.14a) 当1j n <<时:()()1:112:j j j j nj j z X A B x A g λλ-⎛⎫⎪⎡⎤-=- ⎪⎣⎦ ⎪⎝⎭(2.14b) 当j n =时:[]()1:1n n n n n z X B A g λ-⎛⎫=- ⎪⎝⎭(2.14c) 等式(2.14)左端的矩阵M(j),是()1n n m ⨯+-维。
如果矩阵M(j)是行满秩的,方程(2.14)有解,因此矩阵是右可逆的。
如果精确的选择矩阵A 、B 、X ,可以实现矩阵M(j)是行满秩阶梯矩阵。
对于给定闭环期望特征值{}j λ,X 的列X j 按照1,,j n =⋯的顺序递推得到。
方程(2.14)可以用常规的最小二乘法得到。
最后结果z j 、x j 、g j 是最小的2-范数或者最小的F-范数。
在方程(2.7)、(2.10)和(2.11)中正交矩阵P 的范数将不影响最小范数。
以上算法证明了,对于完全能控系统,任意给定的一组实数闭环特征值L ,都可以进行极点配置。
2.5混合极点的配置假定矩阵A 和B 已经化为阶梯控制型标准型。
当闭环的期望特征值中包含共轭复数时,将矩阵Λ化为Schur 型,共轭的闭环特征值在对角线上是2*2的块,其余的实数闭环特征值在对角线上。
假设特征值j λ和1j j λλ+=是一组共轭复极点,复共轭部分可以表示为2*2的块:jj j jj a b b a -⎛⎫Λ=⎪⎝⎭(2.15) 假设:1:100jj j j j j j j z z a b b a ++⎛⎫ ⎪- ⎪Λ= ⎪ ⎪ ⎪⎝⎭(2.16) 对于方程(2.5a)中第j 和j+1列,当11j n <<-时:():1:1:11:11,j j j j j j j j j j AX X BG X z z +++-+-Λ=+ (2.17)使用Kronecker 乘积⊗,将等式(2.13)和等式(2.16)带入(2.17)中得到:()()(),1,1,1M j j v j j r j j ++=+ (2.18)矩阵()()1:1222,1,,j M j j X I M B I -+=⊗⊗是()()2223n n m ⨯+-维的。
()()()()()()()()()()()()()()111111111112211,1,,,,;,,,,,;,,,,j j j j j j Tj j jj j j j j j j j j n n m m v j j z z z z x x x x x g g g g ++-++++++++⎡+=⋯⎣⎤⋯⋯⎦并且2n 维向量()1,1r j j M +=,其中:()()21221222:20,,0j j n n j j j n j b M a I A I I M M M M M b ++⎡⎤-⎛⎫=-⊗+⊗=-+=⎢⎥⎪⎢⎥⎝⎭⎣⎦当1j =和1j n =-,容易得到(2.16a)和(2.16c)相似的等式,等式(2.18)中矩阵和向量中不重要的部分省略。
在等式(2.18)中,矩阵(),1M j j +也是行满秩形式。
等式(2.18)可以被递推得到,对于j 的增加值,并且可以得到最小范数解。
以上算法证明了,对于完全能控系统,任意给定的一组混合闭环特征值L ,都可以进行极点配置。
2.6镇定不可控系统的极点配置为了保证当等式(2.6)表示的矩阵是不能控系统时,以上计算方法仍然成立,使用不可控再分配。
对于镇定的不可控系统,其所有的不可控的部分都是稳定,镇定部分不需要进行极点配置。
因此,镇定的不可控系统可以将等式(2.8)可以记做:()112122200TTA P AP PB AA B ⎛⎫= ⎪⎝⎭(2.19) 这种阶梯标准型本质上将系统矩阵A 和B 分为两部分:A 22是能控的部分,A 11是不能控的部分,A 21是耦合的部分。
()12,F F F =矩阵为反馈矩阵,那么闭环系统矩阵将是下面的表示形式:11212122220A AB F A B F ⎛⎫ ⎪⎪++⎝⎭因此任何反馈将不影响不能控部分的值。
此外,由A 22和B 2组成的系统是能控的。
假设矩阵A 和B 已经化为等式(2.19)中的形式,同时假设等式(2.5a)中的矩阵X 和Λ形式为:11112122212200,XX X X Λ⎛⎫⎛⎫=Λ= ⎪ ⎪ΛΛ⎝⎭⎝⎭(2.20) 那么等式(2.5)可以被分成三部分,第四个等式简化为0=0。
111111110A X X -Λ= (2.21a)()11222222220A B F X X +-Λ= (2.21b)()()()2121222121112221212111T X A B F X X X A B F X +-Λ=Λ-+ (2.21c)等式(2.21a)表示不可控子系统,并且只要矩阵Λ11的余项等于不可控矩阵A 11的余项,就容易选择矩阵X 11。
其中最简单的方法是用X 11Λ11X 11-1作为A 11的Schur 分解。
等式(2.21b)表示能控子系统的极点配置问题,此时的子系统的状态反馈极点配置的方法与能控系统极点配置的方法相同,因此可以容易确定矩阵X 22和Λ22,最后得出反馈矩阵F 2。
对于任何一个任意矩阵F 1和Λ21,可以选择满足等式(2.21c)的矩阵X 21去修改不可控模型的特征向量。
如果Λ11和Λ22的余项有交集,那么等式(2.21c)左侧的T 变换是可逆的。
在这种情况下,矩阵Λ21可以由下面等式得出:()1212221212111X T X A B F X -=Λ-+⎡⎤⎣⎦ (2.22)如果T 变换是不可逆的,对于期望的矩阵Λ21,当X 22是非奇异的时候,等式(2.21c)右端是T 变换的一种方式。