高等机构学第三章 机构结构理论(张)
- 格式:ppt
- 大小:3.80 MB
- 文档页数:116
第三章 机构的结构理论本章介绍机构的组成理论,空间开链与空间闭链机构的自由度计算方法,平面机构的结构分析,运用图论讨论平面运动链的结构综合,介绍空间运动链的型综合,为机构类型的创新设计提供理论基础。
3-1机构的组成理论机构是表示机器组成情况和运动特征的数学模型。
机器中的运动部件转化为机构中的构 件,机器中各运动部件的可动连接转化为机构中的运动副。
这种表明机器组成和运动情况的 数学模型以机构运动简图的方式出现。
这样大大简化了机械的设计与分析的步骤,也促进了 机构学的迅猛发展。
机械种类繁多,结构复杂,特别是机械装置与电子装置、机械技术与液压技术、气动技术、传感技术、光电技术、控制技术的互相渗透结合,已形成机电一体化的高科技的系列化机械产品c 传统机械中的刚性运动部件有时可以被流体、弹性体、挠性体、磁场、电场等取代,所以,构件已不单纯为刚性体。
但本书的研究范围仍把构件局限在刚性体范畴之内。
无论科学技术如何发展,机械是水存的。
机械运动实现的主要手段仍以机械装置为主,所以,本书仍以刚性构件组成的机构为研究对象。
1.运动副的自由度如图3—1所示,一个构件在三维空间中有6个自由度,分别是绕3个坐标轴的转动和沿3个坐标轴的移动。
当用运动副把两构件连接时,构件的运动就会受到运动副的约束作用。
运动副的种类不同,所提供的约束数目不同。
如果运动副提供6个约束,则被连接的构件将失去可动性,连接件与被连接件成为一个刚体。
如果运动副提供0个约束,则被连接件仍保留运动的自由性,从而失去了连接作用。
因此运动副所能提供的最小约束为min 1C =,最大约束为max 5C =。
而运动副的自由度数为6减去运动副提供的约束数。
即 6f C =-式中 f 为运动副的自由度;c 为运动副提供的约束数。
运动副的自由度在1~ 5之间。
2.运动副的分类可以根据运动副提供的约束数日分类,也可以根据运动副的自由度数分类。
两种分类方法行有特色,本书按运动副的自由度分类。

研究生课程教学大纲课程编号:00212727课程名称:高等机构学英文名称:Advanced Kinematics and Dynamics of Mechanisms学时:40学分:2.5适用学科:机械设计及理论课程性质:选修课(作为必修课条件不成熟)先修课程:机械原理一、课程的性质及教学目标课程的性质:高等机构学是机械设计及理论学科研究生的主要学位课程之一,是在机械原理的基础上发展起来的,是机械原理课程内容的发展与深化。
其研究内容仍然是围绕机构的组成与结构、机构的运动分析与综合以及机械系统动力学等内容。
但在机构种类方面,已从平面低副机构扩展到空间低副机构,高副机构的基本理论远远超过机械原理内容。
教学目标:培养学生在机械原理课程的基础上继续深入研究机构结构、机构运动分析和机构综合。
通过学习,使学生能从平面机构的分析与综合扩展到空间机构的分析与综合;从转子惯性力的平衡扩展到机构惯性力的平衡;从刚性构件扩展到弹性构件;从单自由度机构扩展到多自由度机构;从简单的高副机构扩展到瞬心线高副机构和共轭曲线高副机构等。
学会以计算机为工具,以高等数学中的坐标变换与矩阵运算为主的解析法的研究问题方法。
二、课程的教学内容及基本要求机构的结构理论是高等机构学中的重要组成部分,也是对机构学的基础理论进行深入研究的内容。
主要掌握空间闭链机构和开链机构的组成原理,机构的自由度计算,图论的基本知识,机构的型综合和数综合。
该部分内容也是机构创新设计的重要途径。
机构的运动分析是研究机构工作性能的主要依据之一。
求解机构运动构件的运动轨迹,位移、速度、加速度是运动分析的目的。
掌握用坐标变换原理和矩阵方程为数学工具,把平面机构和空间机构运动分析的数学方法统一起来,节省建模时间。
低副机构的综合是机构学中主体部分。
掌握刚体导引机构的综合,轨迹发生机构的综合,函数发生机构的综合构成了连杆机构综合的三大内容。
按运动轨迹综合连杆机构是当代机构综合中发展较快的内容。
读书报告阅读书目:高等机构学姓名:学号:指导老师:二〇一一年十一月高等机构学读书报告1.学科及图书概况1.1学科概述机构学是随着蒸气机的使用而形成和逐步发展起来的一门学科,已有一百多年的发展历史。
在当前世界性新技术革命的形势下,这一学科焕发了青春活力,发展极为迅速。
主要体现在以下一些方面:(1)由于新技术领域(如机器人、仿生机械)的发展,促使机构学迅速发展,并使机构学与其它学科融合而形成了一些新的分支。
(2)由于机械、仪器不断向高速、高精度,小型化发展,对其动力性能提出了愈来愈高的要求,因而研究机构的动力性能时,需要考虑机构中构件的变形、制造误差,运动间隙等的影响,促使机构的弹性动力学、振动、噪声和平街理论,机构的动力分析和综合等方面有了很大的发展。
(3)由于工业生产不断向机械化和自动化方向发展以及人们在日常生活中机械的应用也日渐广泛,要求提供适当的机构,以实现某些复杂,精巧的运动,因而推动机构综合方法的发展。
(4)由于电子计算机和一些新的数学工具的应用,使机构学的分析与设计方法大为改观。
当前机构的分析与综合方法其考虑问题的深度、复杂性,全面性和方法的有效性,在六十年代以前是难以想象的。
(5)由于机构学在生产和科学技术上的重要性,许多国家都很重视这一学科的发展,已经形成了较强的科研力量和一些研究中心。
迄今,已建立起世界性的机构学学术机构并创办了学术刊物。
在改革开放之后,我国机构学的研究恢复和发展较快。
当前每年有一次全国性的机构学学术会议,交流这一领域的研究成果。
此外,近年来我国不少从事机构学研究的同志在国内外发表了不少引人注目的研究成果。
在这样的形势下,机构学每年都有大量的论文、报告、专著发表。
从事机械设计,机械制造工作的工程技术人员以及从事教学和科研共作的广大科技工作者,为了能创造性地进行工作,都应该善于利用这些科研成果,使之转化为生产力,或者启迪自己的思维,在生产、教学和科研工作中进一步发展和创新。
第三章 机构的结构理论本章介绍机构的组成理论,空间开链与空间闭链机构的自由度计算方法,平面机构的结构分析,运用图论讨论平面运动链的结构综合,介绍空间运动链的型综合,为机构类型的创新设计提供理论基础。
3-1机构的组成理论机构是表示机器组成情况和运动特征的数学模型。
机器中的运动部件转化为机构中的构 件,机器中各运动部件的可动连接转化为机构中的运动副。
这种表明机器组成和运动情况的 数学模型以机构运动简图的方式出现。
这样大大简化了机械的设计与分析的步骤,也促进了 机构学的迅猛发展。
机械种类繁多,结构复杂,特别是机械装置与电子装置、机械技术与液压技术、气动技术、传感技术、光电技术、控制技术的互相渗透结合,已形成机电一体化的高科技的系列化机械产品c 传统机械中的刚性运动部件有时可以被流体、弹性体、挠性体、磁场、电场等取代,所以,构件已不单纯为刚性体。
但本书的研究范围仍把构件局限在刚性体范畴之内。
无论科学技术如何发展,机械是水存的。
机械运动实现的主要手段仍以机械装置为主,所以,本书仍以刚性构件组成的机构为研究对象。
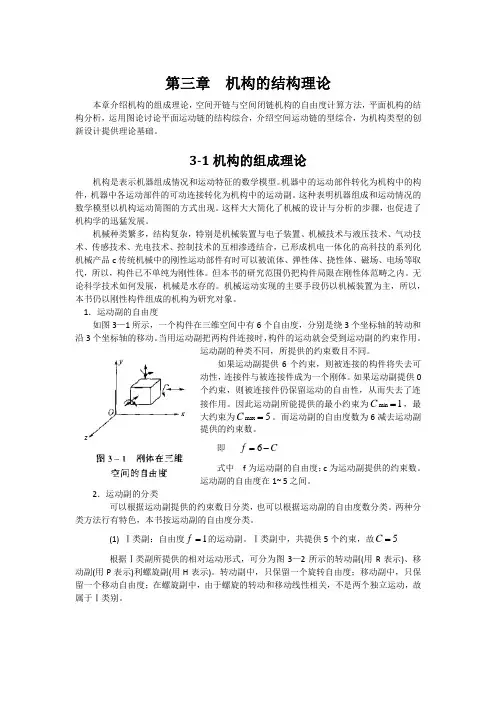
1.运动副的自由度如图3—1所示,一个构件在三维空间中有6个自由度,分别是绕3个坐标轴的转动和沿3个坐标轴的移动。
当用运动副把两构件连接时,构件的运动就会受到运动副的约束作用。
运动副的种类不同,所提供的约束数目不同。
如果运动副提供6个约束,则被连接的构件将失去可动性,连接件与被连接件成为一个刚体。
如果运动副提供0个约束,则被连接件仍保留运动的自由性,从而失去了连接作用。
因此运动副所能提供的最小约束为min 1C =,最大约束为max 5C =。
而运动副的自由度数为6减去运动副提供的约束数。
即 6f C =-式中 f 为运动副的自由度;c 为运动副提供的约束数。
运动副的自由度在1~ 5之间。
2.运动副的分类可以根据运动副提供的约束数日分类,也可以根据运动副的自由度数分类。
两种分类方法行有特色,本书按运动副的自由度分类。