控制系统的动态数学模型共205页
- 格式:ppt
- 大小:14.71 MB
- 文档页数:205


控制系统的数学模型控制系统的数学模型在控制系统的分析和设计中,首先要建立系统的数学模型。
自动控制系统的组成可以是电气的、机械的、液压的或气动的,然而描述这些系统的数学模型却可以是相同的。
因此,通过数学模型来研究自动控制系统,可以摆脱各种不同类型的外部特征,研究其内在的共性运动规律。
通过本章的学习,我们要掌握三种数学模型:微分方程、传递函数、动态结构图的建立方法。
熟练掌握自动控制系统传递函数的求取方法。
§2—1 列写微分方程的一般方法微分方程是描述控制系统动态性能的一种数学模型。
建立系统或元件微分方程的一般步骤如下:(1)根据实际工作情况,确定系统和各元件的输入量和输出量;(2)根据物理或化学定律,列写系统各组成元件的原始方程;(3)在可能条件下,对各元件的原始方程进行适当简化,略去一些次要因素或进行线性化处理;(4)消去中间变量,得出描述输出量和输入量(包括干扰)关系的微分方程,即元件的微分方程;(5)对求出的系统微分方程标准化。
即将与输出有关的各项放在等号左侧;而将与输入有关的各项置于等号右侧,等号左右侧各项均按降幂形式排列。
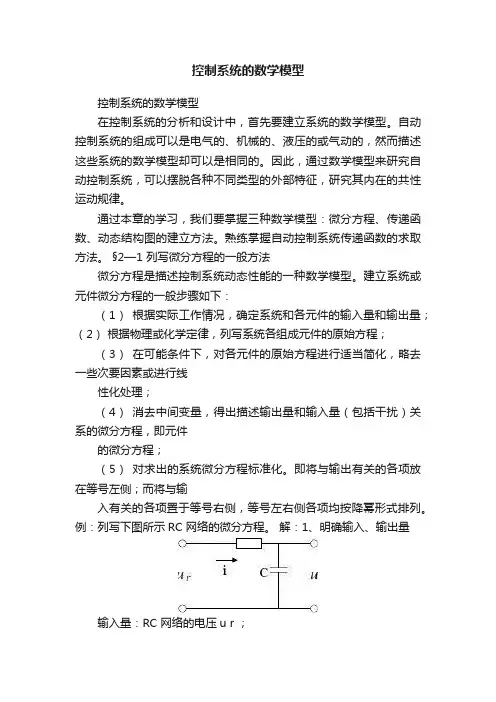
例:列写下图所示RC 网络的微分方程。
解:1、明确输入、输出量输入量:RC 网络的电压u r ;输出量:u c2、建立输入、输出量的动态联系根据电路理论的基尔霍夫电压定律,任意时刻,网络的输入电压等于各支路的电压降和,即u u c r Ri += (1)dtd Ci u c= ………(2)(i 为网络电流,是一个中间变量) 3、消除中间变量-+-将(2)式代入(1)式得u u u c cr dtd RC+= 4、系统的微分方程的标准化 u u u r c cdtd RC=+ 例2:列写下图所示RLC 网络的微分方程。
(零初始条件)解:1、明确输入、输出量输入量:u i ;输出量:u c 2、列写个组件的原始方程==++=)3()2()1( dt d C i dt di L iR u u u u u c Lc L i (i 为网络电流,是一个中间变量) 3、消除中间变量将(3)分别代入(1)、(2)则得=++=)5()4(22 t u d u u u u u d LC dt d RC cL c L c i将(5)代入(4)则得u t u d u u cc c id LC dt d RC++=224、系统的微分方程的标准化u u u t u d i c c c dt dRC d LC =+++22即为所求的微分方程例3:列写下图所示RL 网络的微分方程。
控制系统的数学模型
控制系统是一种能够自动实现某种规律性动态过程的机电设备,具有广泛的应用和重要的意义。
为了更好地理解和设计控制系统,我们需要学习控制系统的数学模型。
控制系统的数学模型是对系统动态行为的精确描述,通常用微分方程或差分方程来表示。
这个模型是由系统的结构和性质所决定的,因此在设计控制系统时需要考虑到不同方面的因素。
在实际应用中,通常采用系统的状态空间描述法来建立数学模型,其基本形式是:x(t+1) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
其中,x(t)为系统的状态向量,表示系统各输出量之间的关系;u(t)为输入量向量,表示系统受控的变量;y(t)为输出量向量,表示系统运行时的响应状态;A、B、C、D是系统常数矩阵,分别表示状态转移矩阵、输入特性矩阵、输出矩阵和直流通道矩阵。
这个模型允许我们对控制系统的状态、输入、输出之间的关系进行全面的分析和掌握。
控制系统的数学模型建立好之后,我们需要对其进行仿真和实验验证。
通过模拟相应的输入和输出,可以检验数学模型的可靠性和精度,并找出有误差的地方进行调整和改进。
同时,也能够为控制系统的设计和优化提供有力的指导和参考。
综上所述,控制系统的数学模型是其设计和优化的基础和关键,
建立好数学模型能够更全面地分析和预测系统的运行状态,并为进一
步进行仿真和实验提供必要的基础。
因此,在学习和设计控制系统时,需要注重数学模型的学习和应用,以提高系统的可靠性和实用性。