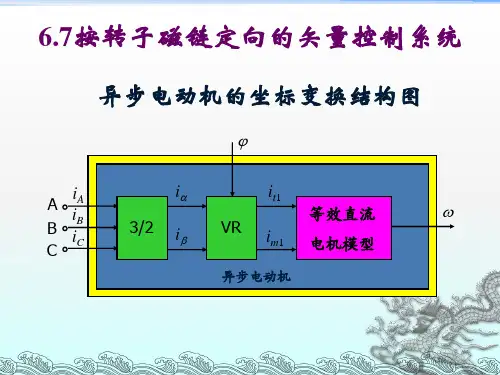
电力拖动自动控制系统陈伯时6-6异步电动机动态数学模型
- 格式:ppt
- 大小:975.00 KB
- 文档页数:60
电力拖动自动控制系统-运动控制系统〔阮毅伯时〕课后答案包括思考题和课后习题第2章2-1 直流电动机有哪几种调速方法?各有哪些特点?答:调压调速,弱磁调速,转子回路串电阻调速,变频调速。
特点略。
2-2 简述直流 PWM 变换器电路的根本构造。
答:直流 PWM 变换器根本构造如图,包括 IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流 PWM 变换器,通过改变直流 PWM 变换器中 IGBT 的控制脉冲占空比,来调节直流 PWM 变换器输出电压大小,二极管起续流作用。
2-3 直流 PWM 变换器输出电压的特征是什么?答:脉动直流电压。
2=4 为什么直流 PWM 变换器-电动机系统比 V-M 系统能够获得更好的动态性能?答:直流 PWM 变换器和晶闸管整流装置均可看作是一阶惯性环节。
其中直流 PWM 变换器的时间常数 Ts 等于其 IGBT 控制脉冲周期〔1/fc〕,而晶闸管整流装置的时间常数 Ts 通常取其最大失控时间的一半〔1/〔2mf〕。
因 fc 通常为 kHz 级,而 f 通常为工频〔50 或 60Hz〕为一周〕,m 整流电压的脉波数,通常也不会超过 20,故直流 PWM 变换器时间常数通常比晶闸管整流装置时间常数更小,从而响应更快,动态性能更好。
2=5 在直流脉宽调速系统中,当电动机停顿不动时,电枢两端是否还有电压?电路中是否还有电流?为什么?答:电枢两端还有电压,因为在直流脉宽调速系统中,电动机电枢两端电压仅取决于直流 PWM 变换器的输出。
电枢回路中还有电流,因为电枢电压和电枢电阻的存在。
2-6 直流 PWM 变换器主电路中反并联二极管有何作用?如果二极管断路会产生什么后果?答:为电动机提供续流通道。
假设二极管断路则会使电动机在电枢电压瞬时值为零时产生过电压。
2-7 直流 PWM 变换器的开关频率是否越高越好?为什么?答:不是。
因为假设开关频率非常高,当给直流电动机供电时,有可能导致电枢电流还未上升至负载电流时,就已经开场下降了,从而导致平均电流总小于负载电流,电机无法运转。

电力拖动自动控制系统电力拖动自动控制系统简介电力拖动自动控制系统包括:直流调速系统和交流调速系统。
直流调速系统包括:直流调速方法、直流调速电源和直流调速控制。
交流调速系统包括:交流调速系统的主要类型、交流变压调速系统、交流变频调速系统、绕线转子异步电机双馈调速系统——转差功率馈送型调速系统和同步电动机变压变频调速系统。
电力拖动自动控制系统课程内容介绍第一篇直流调速系统闭环反馈直流调速系统1.1 直流调速系统用的可控直流电源根据前面分析,调压调速是直流调速系统的主要方法,而调节电枢电压需要有专门向电动机供电的可控直流电源。
常用的可控直流电源有以下三种:旋转变流机组——用交流电动机和直流发电机组成机组,以获得可调的直流电压。
静止式可控整流器——用静止式的可控整流器,以获得可调的直流电压。
直流斩波器或脉宽调制变换器——用恒定直流电源或不控整流电源供电,利用电力电子开关器件斩波或进行脉宽调制,以产生可变的平均电压。
1.2 晶闸管-电动机系统(V-M系统)的主要问题本节讨论V-M系统的几个主要问题:(1)触发脉冲相位控制;(2)电流脉动及其波形的连续与断续;(3)抑制电流脉动的措施;(4)晶闸管-电动机系统的机械特性;(5)晶闸管触发和整流装置的放大系数和传递函数。
1.3 直流脉宽调速系统的主要问题自从全控型电力电子器件问世以后,就出现了采用脉冲宽度调制(PWM)的高频开关控制方式形成的脉宽调制变换器-直流电动机调速系统,简称直流脉宽调速系统,即直流PWM 调速系统。
(1)PWM变换器的工作状态和波形;(2)直流PWM调速系统的机械特性;(3)PWM 控制与变换器的数学模型;(4)电能回馈与泵升电压的限制。
1.4反馈控制闭环直流调速系统的稳态分析和设计本节提要:转速控制的要求和调速指标;开环调速系统及其存在的问题;闭环调速系统的组成及其静特性;开环系统特性和闭环系统特性的关系;反馈控制规律;限流保护——电流截止负反馈1.5 反馈控制闭环直流调速系统的动态分析和设计反馈控制闭环直流调速系统的动态数学模型;反馈控制闭环直流调速系统的稳定条件; 动态校正——PI调节器的设计;系统设计举例与参数计算转速、电流双闭环直流调速系统和调节器的工程设计方法内容提要:转速、电流双闭环控制的直流调速系统是应用最广性能很好的直流调速系统。
《电力拖动自动控制系统》课程设计指导书直流电机双闭环调速控制系统设计目录1 设计任务1.1 技术数据 (1)1.2 要求完成的任务 (2)2 直流电机双闭环系统的组成…………………………………………………..2.1 双闭环系统总体原理结构方案设计…………………………………….2.2 双闭环系统各组成部分电路方案设计…………………………………2.2.1 晶闸管整流电路及保护电路………………………………………….2.2.2 触发控制电路………………………………………………………2.2.3 系统给定…………………………………………………………….2.2.4 检测电路…………………………………………………………….2.2.5 调节器的选择…………………………………………………………2.2.6 电气控制…………………………………………………………..3 转速、电流调节器的设计计算……………………………………………..3.1 电流调节器的设计计算…………………………………………………3.2 转速调节器的设计计算………………………………………………..4 参考文献……………………………………………………………………….5 附录附录1 直流电机双闭环系统设计图纸附录2 直流电机转速、电流双闭环调速控制系统实验附件一:设计说明书书格式要求:1 设计任务:1.1 技术数据(1)用线性集成电路运算放大器作为调节器的转速、电流无静差直流控制系统,主电路由晶闸管可控整流电路供电的V-M系统电动机:额定数据 40KW,220V,210A,1000r/min,电枢电阻Ra=0.5Ω,Rrec=0.8,Ks=40 飞轮转矩:Kgm*m=7.0, 过载倍数1.5晶闸管可控整流电路:三相桥式整流电路,整流变压器Y/Y连接,二次测线电压U2l=230VV-M系统电枢回路总电阻:R=1Ω测速发电机:永磁式,额定数据23.1W,110V,0.21A,1900r/min(2)稳态性能指标生产机械要求调速范围: D=10;静态率: s%≤5%(3)动态性能指标起动超调量:σn %≤15% σi %≤5%扰动产生的动态偏差:(n max-n min)/n min *100%≤10% ;恢复时间: t f≤0.5s(4)对起动、停车的快速性无特别要求1.2 要求完成的任务(1)完成直流转速、电流双闭环系统整体设计(2)按性能系统调节器的设计及相关计算(3)在实验室完成转速、电流双闭环系统的实验(4)呈交一份不少于5000字课程设计说明书,一套设计图纸, 一份实验报告2 直流电机双闭环系统的组成2.1 双闭环系统总体原理结构方案设计…………………………………….直流电机双闭环系统原理图及其描述图2-1 直流电机双闭环系统原理图转速电流双闭环控制的直流调速系统是最典型的直流调速系统,其原理结构如图2-1所示。
第5章5-1 对于恒转矩负载,为什么调压调速的调速范围不大?电机机械特性越软调速范围越大吗?答:带恒转矩负载工作时,普通笼型异步电动机降压调速时的稳定工作范围为0<s<sm,sm 本来就不大,因此调速范围也不大。
降压调速时,机械特性变软,但 sm 不变,故调速范围不变。
5-2 异步电动机变频调速时,为何要电压协调控制?在整个调速范围内,保持电压恒定是否可行?为何在基频以下时,采用恒压频比控制,而在基频以上保持电压恒定?答:因为定子电压频率变化时,将导致气隙磁通变化,影响电动机工作。
在整个调速范围内,若保持电压恒定,则在基频以上时,气隙磁通将减少,电动机将出力不足;而在基频以下时,气隙磁通将增加,由于磁路饱和,励磁电流将过大,电动机将遭到破坏。
因此保持电压恒定不可行。
在基频以下时,若保持电压不变,则气隙磁通增加,由于磁路饱和,将使励磁电流过大,破坏电动机,故应保持气隙磁通不变,即保持压频比不变,即采用恒压频比控制;而在基频以上时,受绕组绝缘耐压和磁路饱和的限制,电压不能随之升高,故保持电压恒定。
5-3 异步电动机变频调速时,基频以下和基频以上分别属于恒功率还是恒转矩调速方式?为什么?所谓恒功率或恒转矩调速方式,是否指输出功率或转矩恒定?若不是,那么恒功率和恒转矩调速究竟是指什么?答:在基频以下调速,采用恒压频比控制,则磁通保持恒定,又额定电流不变,故允许输出转矩恒定,因此属于恒转矩调速方式。
在基频以下调速,采用恒电压控制,则在基频以上随转速的升高,磁通将减少,又额定电流不变,故允许输出转矩减小,因此允许输出功率基本保持不变,属于恒功率调速方式。
恒功率或恒转矩调速方式并不是指输出功率或输出转矩恒定,而是额定电流下允许输出的功率或允许输出的转矩恒定。
5-4 基频以下调速可以是恒压频比控制,恒定子磁通φms、恒气隙磁通φm 和恒转子磁通φmr 的控制方式,从机械特性和系统实现两个方面分析与比较四种控制方法的优缺点。
直流电动机有调速方法:调节电枢供电电压U、减弱励磁磁通 、改变电枢回路电阻R。
自动控制系统的直流调速系统往往以变压调速为主。
可控直流电源有两类:相控整流器、直流脉宽变换器。
脉动的电流波形V-M系统主电路可能出现电流连续和断续2种情况。
抑制电流脉动的措施:1、增加整流电路相数,或采用多重化技术。
2、设置电感量足够大的平波电抗器。
V-M机械特性:在电流连续区,特性比较硬;在电流断续区,机械特性很软,呈显著的非线性,使理想空载转速翘得很高。
晶闸管触发与整流装置看成是一个纯滞后环节,滞后作用是由晶闸管整流装置的失控时间引起的。
与V-M系统相比,直流PWM调速系统的优越性:1、主电路简单,需要的电力电子器件少。
2、开关频率高,电流容易连续,谐波少,电动机损耗及发热都较小。
3、低速性能好,稳速精度高,调速范围宽。
4、若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗干扰能力强。
5、电力电子开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也不大,因而装置效率较高。
6、直流电源采用不控整流时,电网功率因数比相控整流器高。
脉宽调制变换器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电动机转速。
PWM变换器电路有多种形式,总体上可分为不可逆与可逆两大类。
不可逆PWM变换器-直流电动机系统不允许电流反向,续流二极管VD的作用只是为i d提供一个续流的通道。
如果要实现电动机的制动,必须为其提供反向电流通道。
当开关频率为10kHz时,T=01ms,可以近似看成一个一阶惯性环节。
事实上PWM是具有继电特性的非线性环节。
泵升电压:对滤波电容充电的结果造成直流侧电压升高,称作“泵升电压”。
系统在制动时释放的动能将表现为电容储能的增加,要适当地选择电容的电容量,或采取其它措施,以保护电力电子开关器件不被泵升电压击穿。
稳态调速性能指标:1、调速——在一定的最高转速和最低转速范围内调节转速;2、稳速——以一定的精度在所需转速上稳定运行,在各种干扰下不允许有过大的转速波动;3、加、减速——频繁起、制动的设备要求加、减速尽量快;不宜经受剧烈速度变化的机械则要求起、制动尽量平稳。