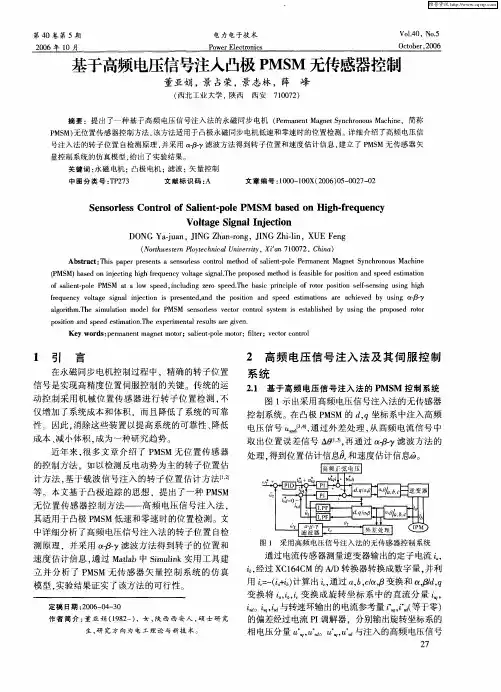
基于高频信号注入的EPS用SPMSM无传感器控制
- 格式:pdf
- 大小:405.48 KB
- 文档页数:5
摘要:介绍了一种基于电机空间凸极追踪转子位置无传感器自检测方法。
该方法采用高频电压载波注入法,采用外差法转子位置跟踪观测器完成了转子位置信息提取,实现无机械位置传感器电机转子位置检测。
并仿真证明了这种方法可行性。
自20世纪80年代以来,现代电机技术、现代电力电子技术、微电子技术、控制技术及计算机技术等支撑技术快速发展,交流伺服控制技术发展以极大迈进,使先前困扰着交流伺服系统电机控制复杂、调速性能差等问题取了突破性发展,交流伺服系统性能日渐提高,价格趋于合理,使交流伺服系统取代直流伺服系统尤其是高精度、高性能要求伺服驱动领域成了现代电伺服驱动系统一个发展趋势。
满足高性能系统技术要求.以永磁同步电机电力传动系统为例,实现高精度、高动态性能速度和位置控制,一般应采用磁场定向矢量控制或直接转矩控制.采取哪种控制方案,都需要测量转子速度和位置,一般是机械式传感器(编码器、解算器和测速发电机)来实现.,这类传感器有安装、电缆连接、故障等问题,并影响系统可靠性和限制系统使用范围,不符合集成应用系统要求。
解决机械传感器给调速系统带来各种缺陷,许多学者开展了无机械传感器交流调速系统研究.无机械传感器交流调速系统是指利用电机绕组中有关电信号,适当方法估计出转子位置和转速,实现转子位置自检测.曾有很多文章提出了各种转子位置和速度检测方法,其中大多数都是检测基波反电势来获转子位置信息.这种基于基波激励方法实施简单,但零速或低速时因反电势过小而根本无法检测,只适用于高转速运行.另外,这些方法要利用基波电压和电流信号计算转子位置和速度,它们对电机参数变化很敏感,鲁棒性差。
包括零速内任何速度下都能够获精确转子位置信息,一些文献提出了一种新转子位置自检测方法,即转子凸极追踪法.这种方法要求电机具有一定程度凸极性,需要有持续高频激励,可以实现电机全速度范围内转子位置检测.这种方法追踪是电机转子空间凸极效应,对电机参数变化不敏感,鲁棒性好.可以看出,这种转子位置无传感器自检测方法学术思想新颖,其研究具有重要理论意义和工程实用价值。
摘要永磁同步电机(PMSM)因其体积小、效率高、能量密度高等特点,已经在工业生产、日常生活、新能源汽车等领域中得到了广泛的应用。
常用的永磁同步电机控制策略都需要实时获知转子的位置,目前一般是通过角度传感器来获得转子位置,但与此同时,带有角度传感器的控制系统往往需要控制系统提供额外的接口电路,而且需要考虑传感器的稳定性和成本等问题,一些工作情况比较恶劣的情况下甚至不允许系统加装传感器。
鉴于这些原因,无位置传感器的PMSM控制成为当前需要解决的一个问题。
本文针对这一问题,研究了基于高频信号注入法的PMSM无位置传感器的控制策略。
本文首先分析了PMSM的基本结构以及数学模型,然后介绍了空间矢量脉冲宽度调制(SVPWM)的理论。
在SVPWM的基础上,介绍了PMSM的矢量控制,即通过坐标变换解耦,把控制系统的励磁分量和转矩分量单独控制。
在矢量控制系统的大框架下,介绍了高频信号注入法的基本工作原理,即在电机的基波电压中注入幅值远低于直流总线电压、频率远高于转子电角度频率的正弦信号,然后对高频信号激励下的定子电流进行采样,通过滤波器获得含有转子位置的高频信号,再通过一系列数学运算解算出转子位置。
在这些理论基础上,建立了旋转高频注入法和脉振高频注入法的MATLAB/Simulink模型,仿真结果表明两种高频注入法都能较好的跟踪转子位置。
设计了以MKV46F256VLH16为核心的PMSM无位置传感器控制系统,并在图形化上位机FreeMASTER平台运行了基于脉振高频注入法的实验,得到了详细的实验波形和数据。
论文最后通过仿真和实验结果,得出结论。
关键词:永磁同步电机 无位置传感器 矢量控制 高频注入法AbstractPermanent Magnet Synchronous Motor(PMSM) has been widely used in the field of industrial production, daily life, new energy vehicles and so on due to its small volume, high efficiency, high energy density, etc. In general, common control strategy for PMSM needs real-time rotor position, which is usually obtained by rotor position sensor. Meanwhile, control system with position sensor should offer additional interface electric circuit, and the stability and cost of position sensor should be taken into consideration. In addition, position sensor could not be installed in harsh situation. In consideration of these reasons, sensorless control system for PMSM need to be proposed. This paper aims at this issue and studies strategy of sensorless control on PMSM based on high frequency signal injection.This paper analyzes the basic structure and mathematic model of PMSM, and introduces the theory of Space Vector Pulse Width Modulation(SVPWM). B ased on SVPWM, vector control system of PMSM is introduced, which decouples excitation and torque variable using coordinates transform, so two variables could be controlled alone. Basic principle of high frequency signal injection is introduced based on the frame of vector control. Sinusoidal signal is injected into motor basic voltage, whose amplitude is far below dc bus voltage and frequency is far higher than rotor electrical frequency. After sampling stator current which is generated by high frequency injection, high frequency signal with rotor position information could be obtained by filter. Rotor position could be solved with mathematic operation by high frequency signal. Based on these theoretical analysis, MATLAB/Simulink model of rotating high frequency signal injection and fluctuating high signal frequency injection are built, which have superior performance on rotor position trace. At last, a sensorless PMSM control system experiment platform is designed, which uses the MKV46F256VLH16 chip as the core component, and experiment of high frequency signal injection is operated on graphic upper-computer FreeMASTER, and detailed experimental waveforms and data are obtained.Finally, this paper draw a conclusion based on simulation and experiment.Keywords:PMSM; Sensorless; Vector Control; High Frequency Signal Injection目录摘要 (I)Abstract ................................................................................................................................................... I I 目录. (III)第一章绪论 (1)1.1研究背景 (1)1.2国内外发展现状及分析 (3)1.3本文主要研究内容 (5)第二章PMSM的数学模型与控制 (7)2.1永磁同步电机的基本结构 (7)2.2 PMSM的数学模型 (8)2.3 SVPWM算法的原理与实现 (12)2.4 PMSM的矢量控制 (15)2.5本章小结 (17)第三章高频信号注入法的PMSM无位置传感器控制 (18)3.1 高频激励下的PMSM数学模型 (18)3.2 旋转高频电压注入法的PMSM无传感器控制 (20)3.3 脉振高频电压注入法的PMSM无传感器控制 (23)3.3.1 脉振高频电压注入法的基本原理 (23)3.3.2 基于跟踪观测器的转子位置估计方法 (25)3.3.3 基于PLL转子位置估计方法 (26)3.4 转子极性判断 (28)3.5 本章小结 (30)第四章高频注入法的Simulink仿真 (32)4.1 基于SVPWM的FOC控制算法仿真 (32)4.1.1 SVPWM算法仿真模块 (32)4.1.2 基于SVPWM的FOC控制算法仿真 (35)4.2旋转高频电压注入法系统仿真 (37)4.3脉振高频电压注入法系统仿真 (41)4.4 两种高频注入法的比较 (43)4.5 本章小结 (43)第五章PMSM无传感器矢量控制系统设计 (45)5.1 系统硬件结构 (45)5.1.1 主控制芯片 (46)5.1.2 电源电路 (46)5.1.3 IPM功率电路 (48)5.1.4 信号采集电路 (49)5.1.5 通信电路 (51)5.2 系统软件结构 (51)5.2.1 主程序设计 (52)5.2.2 中断子程序设计 (52)5.2.3 SVPWM程序设计 (53)5.2.4 PID程序设计 (54)5.2.5 脉振高频注入法检测转子位置程序设计 (55)5.3 基于高频注入法的无位置传感器永磁同步电机矢量控制系统试验 (56)5.4本章小结 (60)结论与展望 (61)参考文献 (63)攻读硕士学位期间取得的研究成果 (67)致谢 (68)第一章绪论第一章绪论1.1研究背景能源一向是人类生活、工业生产必不可缺的物质根本。
基于无滤波器高频方波注入的IPMSM无传感器控制策略傅睿潇;黄守道;王海龙;王家堡【摘要】本文提出了一种基于静止坐标系的高频方波电压注入方法.该方法是通过在α∞静止坐标轴系中注入高频方波电压,从而得到高频电流响应来估算永磁同步电机的转子位置.该方法采用高注入频率,从而可以减少转子电阻的影响,提高估计精度.其次,该方法在信号处理过程中无需滤波器的使用,因此控制系统的带宽得到了提升.此外,为准确地估计转子位置,本文采用了比传统PI观测器的估计精度更高、抗扰动能力更强的扩张状态观测器(Extended State Observer,ESO).最后,在一台1.5kW的内置式永磁同步电机上进行了实验,实验结果证明了在低速情况下本文提出的无传感器控制方法能取得优异的结果.【期刊名称】《大电机技术》【年(卷),期】2018(000)006【总页数】6页(P6-11)【关键词】内置式永磁同步电机;无位置传感器;高频注入;低速;ESO【作者】傅睿潇;黄守道;王海龙;王家堡【作者单位】湖南大学,长沙410000;湖南大学,长沙410000;湖南大学,长沙410000;湖南大学,长沙410000【正文语种】中文【中图分类】TM351永磁同步电机因其转矩密度大、效率高而在电动车驱动、舰船推进、数控系统及家用电器等领域得到广泛应用。
高性能的永磁同步电机控制技术如矢量控制需要转子精确的位置信息。
通常转子位置信息由机械式位置传感器获得,然而该传感器的安装会增加系统的成本和尺寸,并降低系统的可靠性,且在特殊环境中无法使用机械式传感器,为了解决以上问题,国内外学者提出了无位置传感器控制技术[1-3]。
永磁同步电机无传感器策略主要有滑模观测器、扩展卡尔曼滤波器、模型参考自适应控制[4-6]。
这些方法都是通过检测反电动势再利用电机模型得出转子位置,然而在低速甚至零速的情况下,反电动势幅值太小,信噪比太低,因而无法准确提取来估计转子位置。
基于高频旋转电压信号注入的IPMSM无位置传感器控制寿利宾;袁登科【摘要】A sensorless IPMSM control method using high frequency injection technique was investigated. Through injecting high frequency rotating voltages in the static coordinates, a new position detection method which uses signal processing technology to deal with high frequency current to estimate the rotor position was investigated. The simulation results demonstrate that the rotor position can be detected correctly, and the motor can run reliably.%分析了采用高频信号注入技术的无位置传感器控制算法。
该新型估算方法在静止坐标系下注入高频旋转电压,通过信号处理技术,对高频响应电流进行处理,进而得出转子的位置信息。
仿真结果表明,该方法能够准确检测出IPMSM的转子位置,实现电机的可靠运行。
【期刊名称】《电机与控制应用》【年(卷),期】2014(000)012【总页数】5页(P10-14)【关键词】内置式永磁同步电机;无位置传感器控制;高频旋转电压【作者】寿利宾;袁登科【作者单位】同济大学电气工程系,上海 201804;同济大学电气工程系,上海201804【正文语种】中文【中图分类】TM302.10 引言永磁同步电机(Permanent Magnet Synchro-nous Motor, PMSM)由于高效率、高功率密度和更好的动态响应等优点在现代电力传动系统应用越来越广泛[1]。
基于高频注入法的PMSM无位置传感器控制策略研究基于高频注入法的PMSM无位置传感器控制策略研究摘要:随着现代工业的快速发展,对电机的精确控制需求越来越高,传统的感应电机通常需要使用位置传感器来获取电机的转子位置信息,但由于位置传感器成本较高且易受环境影响,因此研究无位置传感器的电机控制策略显得尤为重要。
本文针对永磁同步电机(PMSM)无位置传感器控制策略进行研究,提出了基于高频注入法的控制策略,并通过实验验证了该策略的有效性。
1.引言永磁同步电机作为一种具有高效率和高功率密度的电机,被广泛应用于伺服驱动和工业自动化领域。
然而,传统的PMSM控制通常需要使用位置传感器来获得转子位置信息,这不仅增加了系统成本,而且容易受到环境干扰。
因此,研究无位置传感器的PMSM控制策略对提高系统可靠性和降低成本具有重要意义。
2.基于高频注入法的PMSM无位置传感器控制策略高频注入法是一种通过在电机定子上注入高频信号来获得转子位置信息的方法。
传统的高频注入法基于转子磁阻调制的转移函数,然而,在PMSM控制中,这种方法难以实现。
因此,本文提出了一种改进的高频注入法,该方法基于电流误差最小化原理来估计转子位置。
3.控制策略设计首先,建立PMSM的数学模型,并基于电流误差最小化原理推导出位置估计公式。
然后,设计了控制器来实现位置估计和电流控制。
控制器分为两个部分:位置估计模块和电流控制模块。
位置估计模块通过高频注入法估计转子位置,而电流控制模块通过比例积分控制算法调节电流以实现期望转矩。
4.实验验证和结果分析通过搭建实验平台,采集电机的电流和位置信息,并与基于位置传感器的控制方法进行对比。
实验结果表明,基于高频注入法的无位置传感器控制策略能够实现较高的位置估计精度和稳定性,与传统的位置传感器控制方法相比,具有更好的性能。
5.性能评估和讨论本文通过对控制策略的性能进行评估和讨论,分析了高频注入法在PMSM无位置传感器控制中的优势和不足。
基于高频旋转电压注入的永磁同步电机无位置传感器矢量控制张伯泽;阮毅【摘要】对基于高频旋转电压注入的内置式永磁同步电机(IPMSM)无位置传感器矢量控制策略进行了研究.向IPMSM注入高频旋转电压矢量,应用IPMSM的高频模型,推导出高频电流响应.提出了一种高频电流信号提取方案,从高频电流响应中估算出IPMSM的位置.提出的控制策略可以实现IPMSM从极低速0.5 Hz到高速的宽范围工作.大量的仿真结果表明:提出的控制策略有良好的动态响应和稳态响应,位置和转速估算有较高的精度,系统有较强的鲁棒性,IPMSM在极低速下运行良好.【期刊名称】《电机与控制应用》【年(卷),期】2016(043)007【总页数】5页(P12-15,20)【关键词】内置式永磁同步电机;高频旋转电压注入;矢量控制;无位置传感器控制【作者】张伯泽;阮毅【作者单位】上海大学,上海200072;上海大学,上海200072【正文语种】中文【中图分类】TM351永磁同步电机因其体积小、重量轻、响应快、损耗小、功率密度大和效率高等优点获得了广泛应用[1-2]。
通常情况下,对永磁同步电机转速和转矩的精确控制,是用位置或速度传感器实现的。
然而,位置和速度传感器的安装需要额外的空间,且有位置或速度传感器的系统成本高、可靠性低、不易维护。
为了替代位置和速度传感器,提出了各种控制策略,总体上可分为两大类:基波模型法[3-8]和高频信号注入法[9-17]。
基波模型法直接或间接地从反电动势中提取位置信号,实施起来简单。
但是基波模型法对电机的参数变化敏感;在低速和零速时,反电动势很小甚至为零、难以提取,此时该类方法不能正常工作。
高频信号注入法在电机出线端注入高频电压(或电流)信号,通过检测产生的高频电流(或电压)响应来获得转子位置信息。
高频信号注入法能够解决永磁同步电机低速和零速下的转子位置估算,对电机的参数变化不敏感,鲁棒性好。
近年来出现了人工智能法[18-19],这类方法硬件复杂、实现困难,目前多停留在理论研究阶段。
基于高频信号注入的永磁同步电动机的无传感器控制及位置估计误差补偿张志锋;刘晓东【摘要】本文所分析的脉振高频电流注入法,是只在估计转子坐标系的d轴上注入高频电流信号,通过检测高频电压的幅值,获取转子位置误差信号,经过信号处理来提取转子位置信息.同时,从理论上分析了转子位置的估计误差,推导了转子位置估计误差的表达式.为了减小转子位置观测器及电流环PI调节器对转子位置估计误差的影响,提出了转子位置误差补偿策略.通过Matlab/Simulink对系统进行了仿真分析,结果证明改进后的电流调节器和转子位置信号提取过程的有效性,提高了转子位置估计的精度,实现了在全转速范围内对转子位置和速度的估计.即使参数变化较大,也可以很好的跟踪转子的位置,使得永磁同步电动机无传感器控制系统的精确性和稳定性得到提高.【期刊名称】《电气技术》【年(卷),期】2017(000)005【总页数】7页(P12-18)【关键词】永磁同步电动机;脉振高频信号注入;转子位置观测器;转子位置误差补偿【作者】张志锋;刘晓东【作者单位】沈阳工业大学,沈阳 110870;沈阳工业大学,沈阳 110870【正文语种】中文传统的永磁同步电动机由于使用了位置传感器,使得电动机的机械结构变得复杂,同时也使可靠性降低[1]。
而无位置传感器控制技术不仅能提高永磁同步电动机控制系统的可靠性,同时还可以降低对运行环境的要求和电动机系统的成本。
永磁同步电动机的无传感器控制技术是在电动机运行时利用其自身的物理量来估算转子的位置和速度,实现对电动机转速和转矩的控制。
目前使用较多的是反电动势法、估计坐标系法[2-3]、扩展卡尔曼滤波算法[4]等。
反电动势法方法在电动机起动或低速的情况下,由于反电动势特别小甚至为零,导致无法检测出电压。
同时,反电动势法忽略了电枢反应,得到的转子位置相比实际的位置会有较大误差,降低了系统的控制精度。
扩展卡尔曼滤波算法不仅算法复杂,耗费时间,受各种因素的的影响,导致转子实际位置与计算得到的位置有较大误差。
基于脉振高频电流注入SPMSM低速无位置传感器控制刘颖;周波;冯瑛;赵承亮【期刊名称】《电工技术学报》【年(卷),期】2012(027)007【摘要】针对转子磁钢表贴式永磁同步电动机(SPMSM),提出了一种基于脉振高频电流注入的低速无位置传感器控制的新方法。
其原理是在估计的同步旋转坐标系直轴上注入高频正弦电流,通过检测交轴电流环PI调节器的输出电压量,获得含有转子位置估计误差的信号,对此进行适当的信号处理得到估计转子位置角,从而实现无位置传感器控制。
对该方法进行了理论分析、仿真与实验验证,结果表明该方法在低速和零速下均能准确地检测电动机转子的位置和速度,相较于脉振高频电压信号注入法,所提出的方法结构更简单,且稳定性更高。
【总页数】7页(P139-145)【作者】刘颖;周波;冯瑛;赵承亮【作者单位】南京航空航天大学江苏省新能源发电与电能变换重点实验室,南京210016;南京航空航天大学江苏省新能源发电与电能变换重点实验室,南京210016;南京航空航天大学江苏省新能源发电与电能变换重点实验室,南京210016;南京航空航天大学江苏省新能源发电与电能变换重点实验室,南京210016【正文语种】中文【中图分类】TM351【相关文献】1.基于脉振高频电流注入法的SPMSM初始位置检测方法 [J], 陈建松;柏文杰;周融;刘丽东;刘兵;魏佳丹2.基于脉振高频注入的永磁同步压缩机无位置传感器控制 [J], 黄翰3.基于脉振高频注入法的零低速永磁直线同步电机无位置传感器控制 [J], 宋同月;颜建虎;应展烽;池松;周怡4.基于脉振高频电流注入法的SPMSM初始位置检测方法 [J], 陈建松[1];柏文杰[1];周融[1];刘丽东[2];刘兵[3];魏佳丹[3]5.基于高频电流注入法的SPMSM初始位置检测 [J], 李成飞;沈博文因版权原因,仅展示原文概要,查看原文内容请购买。
收稿日期:2023-06-16基金项目:(22CX51)作者简介:(1996-),,,,。
doi:10.3969/j.issn.1005-2798.2023.11.006基于高频注入的带式输送机SPMSM 无传感器控制研究杨京东,李大伟,杜贤弈,吴 康,任丽霜(山西大同大学煤炭工程学院,山西大同 037003)摘 要:(PMSM),。
,(Luenberger)。
Matlab /Simulink ,,。
关键词:带式输送机;永磁同步电机;无速度传感器;高频注入法;龙伯格观测器中图分类号:TP273;TM341 文献标识码:A 文章编号:1005-2798(2023)11-0024-04Research on SPMSM Sensorless Control of Belt Conveyorbased on High Frequency InjectionYANG Jingdong,LI Dawei,DU Xianyi,WU Kang,REN Lishuang(College of Coal Engineering ,Shanxi Datong University ,Datong 037003,China )Abstract :In order to improve the problem that the rotor information of permanent magnet synchronous motor(PMSM)of mine belt con⁃veyor is difficult to be recognized at low speed,a control scheme based on high frequency pulse injection method is studied.In this scheme,the high frequency signal carrying rotor information is extracted and processed by filter,and the stability of the system is im⁃proved by Luenberger Observer.The results of MATLAB /Simulink simulation show that the scheme can get rotor information accuratelyand the model is robust when the belt conveyor is running at low speed.Key words :belt conveyor;permanent magnet synchronous motor;speed sensorless;high frequency injection;Luenberger Observer 、,+,,,[1-2]。
电子产品世界基于高频信号注入的永磁同步电机无传感器控制策略研究*杨 艳1,李长云2,徐 曦2 (1.国网湖北省电力有限公司检修公司,武汉 430000;2.湖南工业大学 智能信息感知及处理技术湖南省重点实验室,湖南 株洲 412000)摘 要:永磁同步电机无传感器控制方法由于具有降低成本、减小系统体积和提高可靠性等优势,广泛应用于军工和民用等各个领域。
本文介绍了用于零和低速下的永磁同步电机无传感器控制技术。
针对传统的脉振高频信号注入法转子初始位置估计不准确的问题,提出一种基于磁极饱和凸机性的方法来正确判断磁极极性。
并通过数学算法将滤波环节进行简化,减少低通滤波器的使用。
通过仿真分析,验证了所设计的脉振高频电压注入法在零和低速段的可行性。
关键词:永磁同步电机;无传感器控制;高频信号注入法;锁相环*湖南省教育厅创新平台开放基金项目(19K026)0 引言永磁同步电机(Permanent magnet synchronous motor, PMSM)具有转矩密度大、动态性能好、可靠性高等竞争优势,已广泛应用于交通、制造设备、家电等行 业[1-3]。
同时,无传感器控制在永磁同步电机中具有成本降低、系统小型化和可靠性提高等优点。
零和低速下的PMSM无传感器控制方法主要是高频信号注入。
高频信号注入法是基于电机凸极性的,其主要思想是:将高频电压信号注入电机定子端,定子电流中会出现一个响应电流信号,此响应信号就包含了转子的位置相关信息,可凭借软件处理获取转子的实际位置。
高频信号注入法主要有以下两种:基于旋转高频信号注入法[4-6]和基于脉振高频信号注入法[7-9]。
高频信号注入法可保证电机低速下稳定运行,此方法在理论上具有很高的精度,但无论是在高频响应电流、控制电流的提取,还是绕组、永磁体、以及开关损耗,都对算法和硬件电路提出了很高的要求。
而过往的研究中脉振高频正弦注入证明了其良好的鲁棒性及估计精度,且控制方法简单,故本文选择脉振高频电压注入法作为PMSM零和低速范围下的无传感器控制策略进行研究。
基于高频信号注入的永磁同步电机无传感器控制策略研究引言在现代工业中,永磁同步电机因其高效率、高功率密度和潜在的节能优势而受到广泛应用。
传统的永磁同步电机控制策略通常需要使用传感器进行转子位置和速度的反馈,然而传感器的使用增加了系统成本和复杂性。
为了克服这些问题,一种新型的无传感器控制策略基于高频信号注入技术应运而生。
本文旨在介绍基于高频信号注入的永磁同步电机无传感器控制策略的研究。
1.高频信号注入原理高频信号注入技术是一种通过在永磁同步电机中注入高频信号来实现转子位置和速度估计的方法。
该技术利用了电机自身的电磁特性,通过对电机绕组施加高频信号,产生与转子位置和速度相关的电信号响应。
这些电信号经过数字信号处理,可以用来估计转子位置和速度,从而实现无传感器的控制。
2.高频信号注入方法为了实现高频信号注入的永磁同步电机无传感器控制,需要考虑以下几个关键步骤:2.1高频信号注入电路设计高频信号注入电路用于在电机绕组中注入高频信号。
该电路需要提供稳定、高频率的信号,并通过滤波器来阻止高频信号对电机正常运行的干扰。
设计合适的高频信号注入电路能够保证信号注入的可靠性和稳定性。
2.2高频信号注入参数选择在进行高频信号注入之前,需要选择合适的注入参数,包括注入频率、注入信号幅值和相位。
这些参数的选择对于估计转子位置和速度的准确性和稳定性具有重要影响。
通过实验和仿真,可以确定最佳的注入参数。
2.3数字信号处理算法设计高频信号注入产生的电信号需要进行数字信号处理,以获得对转子位置和速度的估计。
数字信号处理算法可以利用离散傅里叶变换、角度解缠算法等方法,通过对信号进行滤波、解缠和运算,得到准确的转子位置和速度估计。
3.实验结果与分析为了验证基于高频信号注入的永磁同步电机无传感器控制策略的有效性,进行了一系列实验。
实验结果表明,该控制策略能够准确估计永磁同步电机的转子位置和速度,并实现闭环控制。
相比传统的传感器控制策略,基于高频信号注入的无传感器控制策略能够大幅降低系统成本和复杂性,并提高控制性能。