线性系统的状态空间描述
- 格式:docx
- 大小:112.77 KB
- 文档页数:19
第一章 线性系统的状态空间描述 1. 内容系统的状态空间描述化输入-输出描述为状态空间描述 由状态空间描述导出传递函数矩阵 线性系统的坐标转换组合系统的状态空间方程与传递函数矩阵2. 基本概念系统的状态和状态变量状态:完全描述系统时域行为的一个最小变量组。
状态变量:构成系统状态的变量。
状态向量设系统状态变量为)(,),(),(21t x t x t x n 写成向量形式称为状态向量,记为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()(21t x t x t x t x n状态空间状态空间:以状态变量为坐标轴构成的n 维空间。
状态轨迹:状态变量随时间推移而变化,在状态空间中形成的一条轨迹。
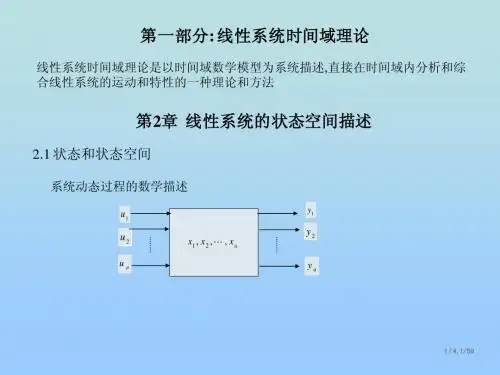
3. 状态空间表达式设系统r 个输入变量:)(,),(),(21t u t u t u r m 个输出:)(,),(),(21t y t y t y m n 个状态变量:)(,),(),(21t x t x t x n例:图示RLC 电路,建立状态空间描述。
电容C 和电感L 两个独立储能元件,有两个状态变量,如图中所注,方程为)()()()()()(t i dtt du C t u t u t Ri dtt di LL c c L L ==++ )()(),()(21t u t x t i t x c L ==状态方程)(01)()(0/1/1/)()()()()()()()(212112211t u t x t x C L L R t xt x t x t xC t u t x t Rx t x L ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⇔⎩⎨⎧==++⇔输出方程[]⎥⎦⎤⎢⎣⎡==)()(01)()(21t x t x t u t y c 一般定义状态方程:状态变量与输入变量之间的关系[][][]t t u t u t u t x t x t x f t xdt t dx t t u t u t u t x t x t x f t xdt t dx t t u t u t u t x t x t x f t xdt t dx r n n n n r n r n );(,),(),();(,),(),()()();(,),(),();(,),(),()()();(,),(),();(,),(),()()(212121212222121111======用向量表示,得到一阶的向量微分方程[]t t u t x f t x),(),()(= 其中n n r r n n f f f f t u t u t u t u t x t x t x t x R R R ∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∙∙∙=∙∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()(:)(,)()()(:)(,)()()(:)(212121输出方程:系统输出变量与状态变量、输入变量之间的关系,即[][][]t t u t u t u t x t x t x g t y t t u t u t u t x t x t x g t y t t u t u t u t x t x t x g t y r n m m r n r n );(,),(),();(,),(),()();(,),(),();(,),(),()();(,),(),();(,),(),()(2121212122212111=== 用向量表示为[]t t u t x g t y ),(),()(=4系统分类:1) 非线性时变系统[][]⎩⎨⎧==t t u t x g t y t t u t x f t x ),(),()(),(),()(2) 非线性定常系统[][]⎩⎨⎧==)(),()()(),()(t u t x g t y t u t x f t x3) 线性时变系统⎪⎩⎪⎨⎧+++++=+++++=rnr n n nn n n r r n n u t b u t b x t a x t a xu t b u t b x t a x t a x)()()()()()()()(1111111111111写成向量形式即为⎩⎨⎧+=+=)()()()()()()()()()(t u t D t x t C t y t u t B t x t A t x其中:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()()()()()()()(,)()()()()()()()()()(212222111211212222111211t b t b t b t b t b t b t b t b t b t B t a t a t a t a t a t a t a t a t a t A nr n n r r nn n n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()()()()()()()(,)()()()()()()()()()(212222111211212222111211t d t d t d t d t d t d t d t d t d t D t c t c t c t c t c t c t c t c t c t C mr m m r r mn m m n n4) 线性定常系统⎩⎨⎧+=+=)()()()()()(t Du t Cx t y t Bu t Ax t x5 状态空间表达式的系统结构图状态和输出方程可以用结构图表示,形象地表明系统中信号传递关系。



第二章 线性系统的状态空间描述§2-1 状态空间的基本概念1、状态:系统的状态,是指系统的过去、现在和将来的状况。
(如:一个质点作直线运动,它的状态就是它每个时刻的位置和速度)2、状态变量:能完全表征系统运行状态的最小数目的一组变量。
(如果用最少的n 个变量x 1(t), x 2(t),……, x n (t)就能完全描述系统的状态,那么这n 个变量就是一组状态变量。
)3、状态向量:设一个系统有n 个状态变量,即x 1(t),x 2(t),……,x n (t),用这n 个状态变量作为分量构成的向量x(t)称为该系统的状态向量。
记为Tn t x t x t x t x )](,),(),([)(21 =4、状态空间:由n 个状态变量作为坐标轴所构成的n 维空间,称为状态空间。
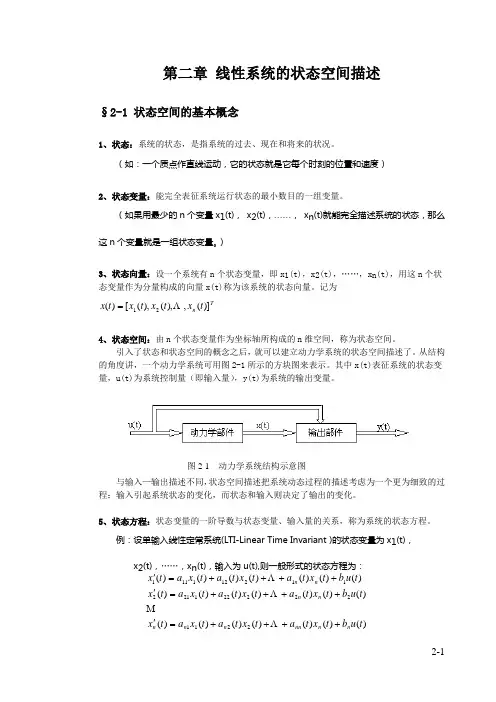
引入了状态和状态空间的概念之后,就可以建立动力学系统的状态空间描述了。
从结构的角度讲,一个动力学系统可用图2-1所示的方块图来表示。
其中x(t)表征系统的状态变量,u(t)为系统控制量(即输入量),y(t)为系统的输出变量。
与输入—输出描述不同,状态空间描述把系统动态过程的描述考虑为一个更为细致的过程:输入引起系统状态的变化,而状态和输入则决定了输出的变化。
5、状态方程:状态变量的一阶导数与状态变量、输入量的关系,称为系统的状态方程。
例:设单输入线性定常系统(LTI-Linear Time Invariant )的状态变量为x 1(t),x 2(t),……,x n (t),输入为u(t),则一般形式的状态方程为:)()()()()()()()()()()()()()()()()()()()()(2211222221212112121111t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x n n nn n n nn n n n ++++='++++='++++='图2-1 动力学系统结构示意图上式可写成向量—矩阵形式:其中:6、输出方程:在指定系统输出的情况下,该输出与状态变量、输入量之间的函数关系式,称为系统的输出方程。
第一章线性系统的状态空间描述1.内容系统的状态空间描述化输入—输出描述为状态空间描述由状态空间描述导出传递函数矩阵线性系统的坐标转换组合系统的状态空间方程与传递函数矩阵2.基本概念系统的状态和状态变量状态:完全描述系统时域行为的一个最小变量组状态变量:构成系统状态的变量状态向量设系统状态变量为X i(t),X2(t)厂,X n(t)写成向量形式称为状态向量,记为_X i(t)x(t)=_X n(t)状态空间状态空间:以状态变量为坐标轴构成的n维空间状态轨迹:状态变量随时间推移而变化,在状态空间中形成的一条轨迹。
3. 状态空间表达式设系统r 个输入变量:U i (t ),u 2(t )^ ,u r (t )m 个输出:yQM), ,y m (t)n 个状态变量:X i (t),X 2(t), ,X n (t)例:图示RLC 电路,建立状态空间描述i LC电容C 和电感L 两个独立储能元件,有两个状态变量, 方程为如图中所注,Ldi L (t)dtRi L (t) U c (t) =u(t)C 沁 “L (t)dtX i (t)二 L(t), X 2(t)二 U c (t)二 LX i (t) RX i (t) X 2(t)二 u(t)Cx (t)二 X (t) N(t) - R/L 殳⑴门1/C0 匚X 2(— Ou(t)U c输出方程一般定义状态方程:状态变量与输入变量之间的关系dX i (t) dt = X i (t)二 f i 〔X i (t),X 2(t), ,X n (t);U i (t),U 2(t), ,U r (t);tl dX 2(t) dt = X 2(t)二 f 2'X i (t),X 2(t)^ ,X n (t);U i (t),U 2(t), ,U r (t);t 】dX n (t) dt 二 X n (t)二 f n 〔X i (t),X 2(t), ^⑴小⑴心⑴,,U 「(t);t 】用向量表示,得到一阶的向量微分方程x(t)二 f 'X(t),u(t), t 1其中X i (t)U ](t)fQ) “、 X 2(t) -U 2(t) .f 2(・)・QnX(t) -c R ,u(t)戶;cR , f (•) ^^: cR N(t) 一JU r (t) 一-f n (叽输出方程:系统输出变量与状态变量、输入变量之间的关系,即%(t)二 g i X i (t),X 2(t),,X n (t);U i (t),U 2(t), ,U r (t);t ]y 2(t)二 g 2 X i (t), X 2(t), ,X n (t);U i (t),U 2(t),,U r (t);t 〔y(t)二 %(t)二 101 X i (t) 殳(t).y m(t)二g m X i(t),X2(t), ,X n(t);U i(t),U2(t),,U r(t);t】用向量表示为y(t)二gX(t),U(t),t]4系统分类:1) 非线性时变系统:x(t) = f〔x(t),u(t),t 】y(t)二 g〔x(t),u(t),t 〕2) 非线性定常系统x(t)二 f 〔x(t),u(t)】 y(t)二 g'x(t),u(t)]3) 线性时变系统‘X i =a“(t)X i + …+a in (t)X n +bn(t)u i + …+匕「住)山 jX n =a ni (t)X i + …+a nn (t)X n +b ni (t)U i + …+0「住)山写成向量形式即为:x(t) = A(t)x(t)+B(t)u(t) y(t)=C(t)x(t) + D(t)u(t)其中:4) 线性定常系统a ii (t) a i2(t)a 2i (t) a 22 (t) A(t)—: :a in (t) bn(t)b i2 (t) a2n ⑴,B(t)=b ⑴ b22(t) _a ni (t)a n2(t) a nn (t) 「Gi(t)C(t)二C 2i (t) cmi (t )G2(t) C 22(t )a_b ni (t) b n2(t)C in (t)〕"dn(t) d i2(t)C 2n (t) d 2i (t) d 22(t),D(t)=Cmn(t)_-dmi(t)dm2(t)d ir (t) d 2r (t )b ir (t) b 2r (t)ab nr (t)「x(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)5状态空间表达式的系统结构图状态和输出方程可以用结构图表示,形象地表明系统中信号传递关线性时变系统结构图6根据物理机理建立状态空间表达式对不同控制系统,根据其机理,即相应的物理或化学定律,可建立系统的状态空间表达式,步骤如下:1)确定系统输入、输出和状态变量;2)列出方程;3)消去中间变量;4)整理成标准的状态和输出方程。
7化输入-输出描述为状态空间描述设单输入—单数出线性定常连续系统的微分方程有下列一般形式X iX 2i 0丨0 i 00 ,Ac = a・.ai + I- ,bc = 90 i 0 0 (i)■1 —anL —an-2 一 ai _ ii 一yC)+a n 」yO+a n _2y d' + ai y+a o y= B n 」u O+B n/W)+…%u+B°u"S n」“s n」 ¥「0 N s s na n 』s n -1a n 2s n-2 a 〔s a 0= D s当选取不同的状态变量时,可以得到不同的状态空间形式1)能控规范性(P11)y = :2人 r「X 2:°X i写成向量形式x = Ax Bu选状态变量 X i = z, X 2二z(1),(n_2) (nJ),X nj = Z,X n = ZX i X 2X nd Xn=X n(n)二 z = —a n X i —anM-a i X n Uz (n)n』z ( nV)十•一 +a i ^«0^ U、、y = Pn/Z (n')十…+ 3忆 +-0 0Xn -AX n 0 i输出方程2)能观规范性 (P10)”xn = yx. = x i ^+a i y -^u i =1,…,n —1能控与能观两种规范型的系数矩阵存在下列关系A c = AObc = Ccc = b 0这种关系称为对偶原理。
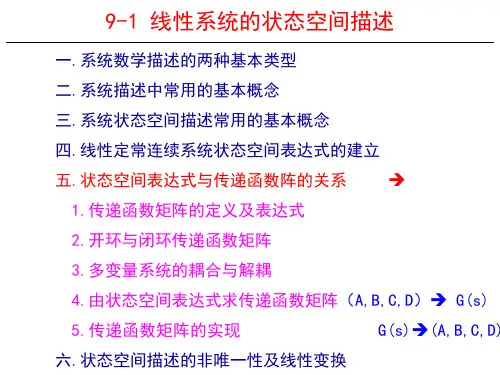
3)对角型只系统含相异实极点时,可化为 A 是对角型的状态空间方程C i 二 lim(s- i)G(s), i =1,2, ,n S T A*定义X i 二 i X iu { ny ='5X iy =:%Xi「1X2 •…-■ n J x^ 1-0 - 1n _1C c X0 0 1 0代=0 1a *■ a 00 - a-j 0 - a ?aa1b °=七0 T0 c °= 0r一1G(s)二N(s) D(s)n=送i =14)约当型 系统含重极点时c i lim (s - f ;i)G(s), i =k 1,r 2/ , n例:已知为传递函数C11. G2 . Q(s 1)2 s 1 s 2c 1^lim(s 1)2G(s) =5 C 12 “iqfts 1)2G(s)L-5 4d c^lim (s 2)G(s) -5A = 0 1_c j1c 2b =-c =和11S n _G(s)」(s)C12I T JC1kD(s) (s- if (s- 1)n亠i -k U 1S - ■■■■■ i‘1C 11C1kG(s)二5 (s 1)2(s 2)8从状态空间表达式求传递函数矩阵已知线性定常系统状态空间模型为x= Ax + Buy 二Cx DusX(s)- X(0) = AX(s) BU(s)Y(s) =CX(s) DU (s)令X(0)=0,则sX(s)二AX(s) BU(s)二X(s) = (si - A)・B U(S)二Y (s)二C(sl - A)—〔B D U (s)= G(s)U (s)G(s)二C(sl - A),B D 系统的传递函数矩阵。
9线性系统的线性变换1)概念介绍状态变量的不同选取,其实是状态向量的一种线性变换,为坐标变或者称换。
设有一个n阶控制系统,两组不同状态变量分别是X1,X2, ,X ~1,~2, ,X n;则两组变量间存在非奇异线性变换关系:X 二Px = X 二P X,P 二IL. P n1 P nn 1于是,有如下线性方程:X i 二P ii X i 山2~2 P ln~n』X2 = P21~1 * P22~2 +…*P2n~nI -Xn 二P ni~i P n2~2 P nn~n即一组状态变量是另一组的线性组合,且这种组合具有唯一的对应关系,均能完全描述同一系统的行为。
状态向量的这种变换称为状态的线性变换或等价变换。
状态的线性变换或等价变换,实质是状态空间的基底变换,也即坐标变换。
状态变换后,状态空间表达式发生变化:原系统: 线性变换:X = P~,~ = P_1x~ = P‘AP~ + P,Bu:= A~ + Bu n」〜y = CP〜Du :二(〜〜Du 由此,有A 二P_1AP,B 二P_1B,(〜-CP,〜-D变换前后系统矩阵相似,故具有相同的基本特性,如行列式相同、秩相同、迹相同、特征多项式相同和特征值相同等。
对于线性定常系统x 二Ax Buy = Cx系统的特征多项式为:丸I _ A = detgl _ A)=丸门+ a附-1+ a?切-?+…+ a n丿+ a n系统的特征方程为:det( I - A) = 0特征方程的根,称为系统的特征值。
系统特征值的不变性:线性变换后det(sl - A) = det(sl - P’AP)二detP'(sl - A)P】二det(P‘)det(sl - A)det(P)二det( si - A)2)化为对角线标准型对线性定常系统,若系统的特征值两两互异,则必存在非奇异变换,将状态方程化为对角线标准型。
实际上P =匕P2P」R n n, AR 二i P•P P2…巳】.0 03)化为Jordan标准型如果系统矩阵A有重根,且A的线性独立的特征向量数等于系统的阶数n,则可将其化为对角线标准型。
当A有重根时,经线性变换一般可将A化为约当标准型J,矩阵J是主对角线上均为约当块的准对角型矩阵,即P’AP 二J 二diag J「J2, ,J M J R“…*M 7 r是-的代数重数J i1. I *J i 二约当块具有形式「人110组合系统的状态空间方程与传递函数矩阵设有两个系统:八 Ax : + By . -i : , I =1y =C |X |D |U |它们的传递函数矩阵为G i (s)=C i (sl-A)‘B i D I1并联其状态空间模型和传递函数为B !I uB 一y =C i X iD 1 u ' C 2 X 2 ' D 2U = C 1 C 2 (D i ■ D 2) u_i“ si - A i 0 B i IG(s)二C(sl - A) BC i Cj(D i D 2)]0 si — A2」B 」y 2y i并联系统\x j +A2 X2二 G(sl - AJ’Br D i C2(sl - A)'B2 D2 = G i(s) G2(s)2串联串联系统其状态空间模型为%Ax 「B 1uA 1x 1B 1u =I=X 2 A 2x 2 + B 2y 〔A 2x 2 +B 2C 1 x^ B 2D 1uy = C 2x 2 D 2u 2 二 C 2x 2 D 2(C 1x< D 1u) -D 2C 1 C 2 lx D 2D 2u传递函数矩阵丫 (s)f(s) = G 2 ( S )U 2(S )9(S )Y 1(S ) g(s)G i (s)U i (s) =G 2(s)G i (s)U (s) G(s)g (s) G i (s)3反馈连接假设D 仁D2=0u反馈连接0 &B iA2 .l x? .]B 2 D ix 1= A 1x^ B 1u 1=A“B 〔u - B 1C 2x 2x 2 二 A 2x 2B 2u 2 二 A 2x 2B 2C 1x 1y 二 C i X i写成向量形式IA)X i ■ B 1U -■ B 1C 2X 2I x = I-A 2x 2 + B 2C 1X 1一y = C 1 0】x传递函数矩阵Y(s)二 Y(s)二 G(s)U i (s)二 G(S )U(S )-Y 2(S )1二 G(s)U(s)-G (S )G 2(S )Y(S )二 I G i (s)G 2(s)Y(s)=G i (s)U(s)从而,有'I G 1(S )G 2(S )Y(S ^G 1(S )U(S ) =G(s)二〔I G(S )G 2(S )F G (S )G(s)9(s)〔l G 2(S )G 1(S )1-1本章小结现代控制理论的数学工具:状态空间描述。