状态空间描述
- 格式:ppt
- 大小:3.52 MB
- 文档页数:79
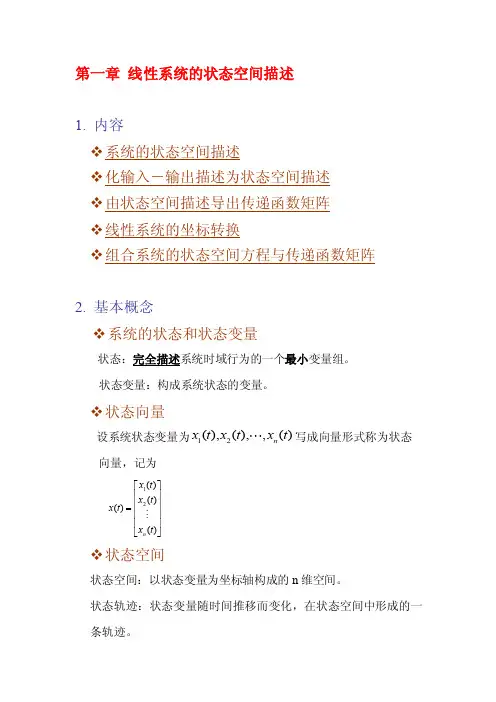
第一章 线性系统的状态空间描述 1. 内容系统的状态空间描述化输入-输出描述为状态空间描述 由状态空间描述导出传递函数矩阵 线性系统的坐标转换组合系统的状态空间方程与传递函数矩阵2. 基本概念系统的状态和状态变量状态:完全描述系统时域行为的一个最小变量组。
状态变量:构成系统状态的变量。
状态向量设系统状态变量为)(,),(),(21t x t x t x n 写成向量形式称为状态向量,记为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()(21t x t x t x t x n状态空间状态空间:以状态变量为坐标轴构成的n 维空间。
状态轨迹:状态变量随时间推移而变化,在状态空间中形成的一条轨迹。
3. 状态空间表达式设系统r 个输入变量:)(,),(),(21t u t u t u r m 个输出:)(,),(),(21t y t y t y m n 个状态变量:)(,),(),(21t x t x t x n例:图示RLC 电路,建立状态空间描述。
电容C 和电感L 两个独立储能元件,有两个状态变量,如图中所注,方程为)()()()()()(t i dtt du C t u t u t Ri dtt di LL c c L L ==++ )()(),()(21t u t x t i t x c L ==状态方程)(01)()(0/1/1/)()()()()()()()(212112211t u t x t x C L L R t xt x t x t xC t u t x t Rx t x L ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⇔⎩⎨⎧==++⇔输出方程[]⎥⎦⎤⎢⎣⎡==)()(01)()(21t x t x t u t y c 一般定义状态方程:状态变量与输入变量之间的关系[][][]t t u t u t u t x t x t x f t xdt t dx t t u t u t u t x t x t x f t xdt t dx t t u t u t u t x t x t x f t xdt t dx r n n n n r n r n );(,),(),();(,),(),()()();(,),(),();(,),(),()()();(,),(),();(,),(),()()(212121212222121111======用向量表示,得到一阶的向量微分方程[]t t u t x f t x),(),()(= 其中n n r r n n f f f f t u t u t u t u t x t x t x t x R R R ∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∙∙∙=∙∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()(:)(,)()()(:)(,)()()(:)(212121输出方程:系统输出变量与状态变量、输入变量之间的关系,即[][][]t t u t u t u t x t x t x g t y t t u t u t u t x t x t x g t y t t u t u t u t x t x t x g t y r n m m r n r n );(,),(),();(,),(),()();(,),(),();(,),(),()();(,),(),();(,),(),()(2121212122212111=== 用向量表示为[]t t u t x g t y ),(),()(=4系统分类:1) 非线性时变系统[][]⎩⎨⎧==t t u t x g t y t t u t x f t x ),(),()(),(),()(2) 非线性定常系统[][]⎩⎨⎧==)(),()()(),()(t u t x g t y t u t x f t x3) 线性时变系统⎪⎩⎪⎨⎧+++++=+++++=rnr n n nn n n r r n n u t b u t b x t a x t a xu t b u t b x t a x t a x)()()()()()()()(1111111111111写成向量形式即为⎩⎨⎧+=+=)()()()()()()()()()(t u t D t x t C t y t u t B t x t A t x其中:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()()()()()()()(,)()()()()()()()()()(212222111211212222111211t b t b t b t b t b t b t b t b t b t B t a t a t a t a t a t a t a t a t a t A nr n n r r nn n n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()()()()()()()(,)()()()()()()()()()(212222111211212222111211t d t d t d t d t d t d t d t d t d t D t c t c t c t c t c t c t c t c t c t C mr m m r r mn m m n n4) 线性定常系统⎩⎨⎧+=+=)()()()()()(t Du t Cx t y t Bu t Ax t x5 状态空间表达式的系统结构图状态和输出方程可以用结构图表示,形象地表明系统中信号传递关系。
状态空间的名词解释状态空间是指描述系统或物体各种可能状态的一个抽象概念。
它在各个领域中都有着重要的应用,包括数学、物理学、计算机科学等。
在这篇文章中,我们将探讨状态空间的概念、性质和应用,并尝试借助一些具体的例子来说明。
首先,让我们来解释一下状态空间的基本定义。
状态空间通常可以被看作是一个多维空间,其中每个维度代表一个状态变量,而每个点则表示一个具体的状态。
例如,对于一个简单的二维状态空间,其中的一个维度可以表示对象的位置,而另一个维度则可以表示对象的速度。
在这个状态空间中,每个点都可以唯一地确定对象的位置和速度。
状态空间的一个重要性质是维数,即它包含的状态变量的个数。
维数的多少直接决定了状态空间的复杂程度。
一个低维的状态空间可能只包含很少的状态变量,而高维的状态空间则可能包含众多的状态变量。
这决定了系统在状态空间中的行为和演化方式。
例如,在物理学中,一个简谐振子的状态空间只有一维,因为只需要考虑物体的位置;而一个复杂的天气预测系统的状态空间可能包含数十个甚至数百个维度,因为需要考虑众多的气象参数。
状态空间的另一个重要概念是状态转移。
状态转移指的是系统在不同状态之间的切换过程。
在状态空间中,状态转移通常由一些规则或方程来描述。
这些规则可以是离散的,例如一个棋盘游戏中的走子规则,也可以是连续的,例如牛顿力学中的运动方程。
通过这些规则,我们可以预测系统在状态空间中的演化和变化。
状态转移的过程也可以被称为系统的动力学,它描述了系统状态的发展轨迹。
除了描述系统的状态和演化,状态空间还可以用于解决一些实际问题。
一个典型的例子是路径规划问题。
在这种问题中,我们需要找到一条从起点到终点的最短路径。
可以将路径规划问题转化为在状态空间中寻找一个状态转移序列的问题。
通过定义合适的状态转移规则和评估函数,我们可以通过在状态空间中搜索来解决这个问题。
类似地,状态空间可以用于机器学习中的强化学习问题、物理系统的建模和仿真等。
状态空间描述
状态空间可以简单地理解为描述系统所处状态的一种抽象概念,它把一个复杂的系统抽象成多个独立状态,并以这些状态的变化来描述系统的演化变化规律。
状态空间描述了系统之间状态的可能变化,从而表明了每个状态之间的连接情况。
1. 什么是状态空间
状态空间是描述系统所处状态的一种抽象概念,它能够将一个复杂的系统抽象成多个独立的状态,并以这些状态的变化来描述系统的演化变化情况。
2. 状态空间的概念
状态空间是一种用于描述系统状态变化的空间,它通过多个状态表达了一个系统的演化情况,并将一个复杂的系统变化的规律映射到状态变化的空间中。
因此,它是表达某个系统演化情况的一种理想方法。
3. 状态空间的总体结构
状态空间是有限的,它由一个特定的状态集合构成,包括一组状态及其间的连接关系,这些连接关系通过不同的操作表示出来。
因此,状态空间的总体结构可以概括为包含了状态和连接情况的一维空间。
4. 状态空间变化
状态空间随着操作的不断变化,其所描述的系统也会不断变化,这就
形成了一个动态的状态空间,这里面存在着状态之间的连接关系,这
些连接关系是由可调整转移概率和操作决定的。
5. 对应建模
状态空间模型将状态空间中的各状态映射到离散时间模型,从而对模
型问题进行建模,通过状态空间模型可以计算出每个状态的概率,从
而能够较为准确地表述系统的状态情况,以找出问题的解决途径。
6. 状态空间可视化
状态空间可以使用可视化图像,将各状态之间的连接关系图示出来,
常见的可视化表示方法有马尔科夫网络图像,状态树图像和拓扑图像,这些可视化图像能够清晰地展示出状态空间的总体结构,从而简化问
题的解决过程。

§3.3 Matlab 实验
1. 状态空间模型脉冲响应、阶跃响应和任意输入响
应
(1) [y,x,t]=impulse(a,b,c,d)
(2) [y,x,t]=step(a,b,c,d),其中y、x 和t 是输出、
状态向量和仿真时间。
(3) [y,x]=lsim(a,b,c,d,u,t,x0)。
例求管亠[0* x c£,为
u(t) =sint的状态输出值。
解程序和结果如下
-0.2
-0.4
2. 离散系统的脉冲响应、阶跃响应、任意输入响应
⑴[y, x]=dimpulse(sys);
(2) [y, x] = dstep( nu m,de n);
(3) [y, x]=dlsim(sys,u); 47y、x 和u 分别为输出、
状态和输入,sys可以是num,den或a,b,c,d,不绘图,当无y, x时直接绘图。
3 •连续和离散状态模型的零输入响应(只对初态x0 响应)
(1) [y,x,t]=i nitial(a,b,c,d,xO)
⑵[y,x,t]=dinitial(a,b,c,d,x0) ,y 为输出,x 为状态,
t为指定输出时间。
当不带y、x和t时,直接绘图。
4 •连续系统离散化
(1) [da,db,dc,dd]=c2dm(a,b,c,d,Ts)
⑵[dnum,dden]=c2d(num,den,Ts) , Ts 是采样周期。
5.矩阵指数
expm(a*t),其中t可为符号变量,也可为实值。
0 1
例如设A = 0',则求e At的命令和结果如下:
||-4 -4。