单片机的足球机器人小车系统设计
- 格式:doc
- 大小:658.50 KB
- 文档页数:48

基于单片机的智能小车的系统设计Design of Intelligent Car System Based on MCU基于单片机的智能车设计[摘要]近几年来,智能车辆己成为汽车和智能控制领域的热点研究课题之一。
它体现了自动控制、人工智能、传感技术、机械、计算机等多个学科领域理论技术的交叉和综合,本论文以飞思卡尔智能车大赛光电组为背景而展开。
智能车系统以Freescale 16位微控制器MC9S12XS128作为系统控制处理器,采用基于光电传感器的信号采样模块获取赛道黑线信息,通过PID控制策略和 PWM控制技术对智能车的转向和速度进行控制。
使智能车能够自主识别黑色引导线并根据黑色引导线实现快速稳定的寻线行驶。
本论文分析了智能车系统的设计方案,详细介绍了智能车控制系统的软硬件设计,包括传感器模块、驱动电机模块、舵机转向模块、测速模块等,并详细介绍了软件控制算法的设计,最后,介绍了智能车的整体调整、测试。
调试实验结果表明,智能车系统工作稳定,能较好的满足控制要求。
[关键词]智能汽车;MC9S12XS128;光电传感器;控制算法Design of Intelligent Car System Based on MCUElectrical Engineering and Automation Major SHI Xiao-ying Abstract: In recent years, intelligent vehicles have become a hot research topic of cars and intelligent control area. It embodies the automatic control, artificial intelligence, sensor technology, machinery, computers and many other areas of the intersection of technology and integrated.The intelligent car system, with the Fresscale 16-bitsingle-chip MC9S12XS128 as its control microprocessor, uses signal acquisition module to obtain lane image information, and adopts signal PID control strategy together with PWM technology to have a control on the steering angle and speed of the system. The main function that the intelligent car may achieve is that the car should track the black-guide-line automatically and move forward following the line as fast and stable as possible. This paper gives an overall design blueprint of the intelligent car system, introduce the hardware design including signal acquisition module, power supply module, motor drive module, servo motor module, velocity collection module and etc. and the intelligent car of the mechanical structure and adjustment method. Finally, on the smart car’s overall debugging and testing, the results show the s mart car hardware system stability, better able to meet the requirements of control.Key words: intelligent vehicles; MC9S12XS128; Photoelectric sensor; Control algorithm目录1 引言 (1)1.1 课题背景 (1)1.2 智能技术国内外发展现状 (1)1.3 课题研究的任务 (1)2 整体设计方案 (2)2.1 路径识别传感器的选定 (2)2.2 系统总体框图 (3)3 硬件电路设计 (4)3.1 MCU模块 (4)3.2 电源管理模块 (5)3.3 路径识别模块 (6)3.3.1 光电传感器原理 (6)3.3.2 传感器的选择 (7)3.3.3 激光传感器电路设计 (7)3.4 电机驱动的选型和电路设计 (9)3.5 速度测量模块 (9)3.6 转向舵机控制模块 (10)3.6.1 舵机的控制 (11)3.7 MC9S12XS128的硬件I/O分配 (12)4 系统的软件设计 (12)4.1 系统初始化 (13)4.2 路径识别算法 (14)4.2.1 激光传感器路径识别状态分析 (14)4.2.2 路径识别算法的设计 (17)4.3 转角和速度控制算法 (17)4.3.1 转向舵机控制算法 (18)4.3.2 驱动电机控制算法 (18)4.4 软件设计环境与开发工具 (19)结束语 (21)参考文献 (22)附录部分源程序 (22)致谢 (28)1 引言1.1 课题背景近年来随着汽车工业的迅速发展,关于汽车的研究也就越来越受到大家的关注。

有关单片机的毕业设计题目篇一:单片机毕业设计,电子毕业设计题目大全一单片机毕业设计题目,电子毕业设计题目1. 单片机接入Internet技术在智能小区中的应用与研究2. 基于PIC单片机的高压智能同步开关操纵系统设计3. 基于单片机的刚性转子现场动平稳测试系统的研制4. 基于单片机的现场多道核能谱数据搜集系统研究5. 单片机模糊操纵晶闸管直流调压系统的研究6. 单片机嵌入式TCP/IP协议的研究与实现7. 基于单片机的几何参数主动量仪和通用测控仪的研制8. 基于C8051单片机的足球机械人小车操纵系统设计9. 利用FPGA模拟实现8051单片机及其外设的功能10. 用于TDMoIP实现的E〈,1〉功能卡单片机操纵研究11. 基于MSP430单片机的数字式压力表的设计与实现12. 基于CAN总线的单片机流量操纵系统的研究13. 单片机和嵌入式系统开发平台化的研究14. 基于单片机语音识别系统设计15. 基于80C196KC单片机的舞蹈机16.基于单片机的工业缝纫机操纵系统研制17. 基于单片机的智能稳压电源18. PIC单片机中国市场拓展战略19. 基于FPGA与单片机20. 基于网络单片机21. 基于“单片机+CPLD/FPGA的程控互换机系统集成化设计22. ——单片机信号搜集及其通信操纵系统研究部份23. 弧焊逆变电源24. 单片机25. 单片机26. 单片机27. 应用28. 机自动调平操纵器的研究29. 机系统设计单片机的web效劳器的设计与实现语言的单片机设计实现的仿人智能PID操纵器33. 基于单片机的船舶柴油机冷却水温度操纵系统34. 基于单片机的活性炭测氡仪的研制35. 单片机静脉麻醉靶控输注系统的研制与应用36. 基于PC+单片机的环境风洞风速操纵系统的研究37. 基于CPLD和单片机的爆轰波数据搜集系统设计38. 基于单片机和DSP的卷绕操纵器数据搜集和通信设计39. 基于MSP430单片机的柴油发电机监控器的设计40. 基于CPLD/FPGA和单片机的爆速仪设计41. 基于单片机操纵的晶闸管中频感应电源的研制42. 基于十六位单片机的电力设备故障在线监测装置的设计与算法研究43. 基于SPCE061A单片机的语音识别系统的研究44. 基于PIC单片机的生物性能实验装置的研究45. 基于Motorola MC68HC08系列单片机演示系统的设计与实现46. 基于TCP/IP协议的单片机与INTERNET互连的设计与实现47. 基于嵌入式实时操作系统和TCP/IP协议的单片机测控系统48. AVR 8位嵌入式单片机在车载全世界定位系统显示终端中的应用49. 基于AVR单片机的250W HID灯电子镇流器的研究50. 基于单片机的TCP/IP技术研究及应用51. 基于P87C591单片机的CAN总线应用层协议的研究52. 基于单片机实现对二级倒立摆的操纵53. C8051FXXX系列单片机仿真器的研制54. 基于80C196MC单片机55. 基于单片机的胶印机操纵系统开发研究56. 基于凌阳单片机的二次压降全自动测量仪的研制57. 基于单片机的超声测距系统58. 基于MOTOROLA单片机59. 全站仪动态测量的研究和其与单片机用60. 一种基于80C196KC单片机61. 基于单片机的对讲系统的研究开发62. 基于单片机机温度操纵器的开发与研究63. 基于单片机ATmega12864. 基于单片机65. 基于单片机66. 采纳W78E5867. 基于单片机68. 基于69. 基于70. 基于的配电网综合参数测控仪研究71. 的单片机操纵研究Java虚拟机研究与设计单片机的温度监测系统和单片机的数据搜集与处置系统的设计单片机的在线测试技术的研究76. 分散式智能测控终端的研制——基于单片机的大容量固态存储技术的设计实现77. 基于单片机的定尺飞锯切割机操纵系统设计78. 基于196单片机的开关磁阻电机调速系统设计79. 基于EDA技术的兼容MCS-51单片机IP核设计80. 基于单片机的嵌入式USB主机研究与实现81. 单片机操纵持续固体激光器高频开关电源的研制82. 基于MSP430单片机的微机自动准同期装置83. 基于MSP430单片机中小型水轮机微机调速器的设计与研制84. 基于单片机的便携式心电监测系统的研究85. 基于单片机和CAN总线的混凝土搅拌站操纵系统设计86. 基于单片机的全位置自动焊接操纵系统的研究87. 工程机械冷却能力单片机操纵系统88. 基于单片机的电除尘集散操纵系统的并行数据搜集89. 基于单片机的磁酶免测定仪的研制90. 基于单片机的籽棉动态称重系统91. ZLG51单片机宏汇编器的设计与实现92. 基于单片机的轧机实验台散布式监测系统研究93. 基于单片机的DDD心脏起搏器的设计94. 来电显示单片机的设计95. 基于单片机操纵的能量回馈操纵系统的研究96. 基于单片机的步进电机式汽车仪表的设计与实现97. 基于微功耗单片机的水声遥控系统的研究98. 面向单片机接口的新型液晶显示操纵器的研制99. 基于单片机100. 单片机在汽车制动性能检测系统中的应用101. 基于单片机操纵的MAG102. 基于单片机AT89C2051103. 基于MSP430单片机的多功能104. 基于单片机的柴油发动机105. 单片机106. 80C196KC单片机中子和107. 汽108. 基于单片机109. 基于C8051110. 基于单片机效劳器在远程故障诊断中的应用111. 基于多高级用户板的设计与开发112. M在发动机台架实验中的应用研究113. 单114. 单片机操纵系统的研究的海水有机磷实时数据搜集与操纵系统单片机的石油倾点自动测量系统设计的直接数字频率合成(DDS)技术的应用研究片机模糊操纵在电加热炉温度操纵系统中的应用119. PIC单片机芯片在电涡流传感器温度补偿中的应用120. 基于C8051F单片机直流电动机反馈操纵系统的设计与研究121. 基于单片机的嵌入式Web效劳器的研究122. MOTOROLA单片机MC68HC(8)05PV8/A内嵌EEPROM的工艺和制程方式及对良率的阻碍研究123. 基于模糊操纵的电阻钎焊单片机温度操纵系统的研制124. 基于MCS-51系列单片机的通用操纵模块的研究125. 基于单片机实现的供暖系统最正确启停自校正(STR)调剂器126. 单片机操纵的二级倒立摆系统的研究127.基于增强型51系列单片机的TCP/IP协议栈的实现128. 基于单片机的蓄电池自动监测系统129. 基于32位嵌入式单片机系统的图像搜集与处置技术的研究130. 基于单片机的作物营养诊断专家系统的研究131. 基于单片机的交流伺服电机运动操纵系统研究与开发132. 基于单片机的泵管内壁硬度测试仪的研制133. 基于单片机的自动找平操纵系统研究134. 基于C8051F040单片机的嵌入式系统开发135. 基于单片机的液压动力系统状态监测仪开发136. 模糊Smith智能操纵方式的研究及其单片机实现137. 一种基于单片机的轴快流CO〈,2138. 基于双单片机冲床数控系统的研究139. 基于CYGNAL单片机的在线间歇式浊度仪的研制140. 基于单片机的喷油泵实验台操纵器的研制141. 基于单片机的软起动器的研究和设计142. 基于单片机操纵的高速快走丝电火花线切割机143. 基于单片机的机电产品操纵系统开发144. 基于PIC单片机的智能电话充电器145. 基于单片机146. 基于单片机147. 基于单片机148. 基于微型光谱仪的单片机149. 单片机150. 基于单片机151. 基于单片机152. 基于PIC153. 基于单片机154. 气操纵系统的研制155. 基于156. 基-数字转换器的研究157. 的光纤Bragg光栅解调系统的研究单片机的多生理信号检测仪的电机运动操纵系统设计ico专用单片机核的可测性设计研究162. 基于MCS-51单片机的热量计163. 基于双单片机的智能遥测微型气象站164. MCS-51单片机构建机械人的实践研究165. 基于单片机的轮轨力检测166. 基于单片机的GPS定位仪的研究与实现167. 基于单片机的电液伺服操纵系统168. 用于单片机系统的MMC卡文件系统研制169. 基于单片机的时控和计数系统性能优化的研究170. 基于单片机和CPLD的粗光栅位移测量系统研究171. 单片机操纵的后备式方波UPS172. 提升高职学生单片机应用能力的探讨173. 基于单片机操纵的自动低频减载装置研究174. 基于单片机操纵的水下焊接电源的研究175. 基于单片机的多通道数据搜集系统176. 基于uPSD3234单片机的氚表面污染测量仪的研制177. 基于单片机的红外测油仪的研究178. 96系列单片机仿真器研究与设计179. 基于单片机的单晶金刚石刀具刃磨设备的数控改造180. 基于单片机的温度智能操纵系统的设计与实现181. 基于MSP430单片机的电梯门机操纵器的研制182. 基于单片机的气体测漏仪的研究183. 基于三菱M16C/6N系列单片机的CAN/USB184. 基于单片机和DSP185. 基于单片机的膛壁温度报警系统设计186. 基于AVR单片机187. 基于单片机船舶电力推动电机监测系统188. 基于单片机网络的振动信号的搜集系统189. 基于单片机190. 基于单片机的叠图机191. 基于单片机嵌入式Web192. 基于AT89S52单片机193. 基于单片机194. 机操纵系统195. 基于单片机虚拟教学实验中的应用研究196. 基于单片机197. 基于的莫尔斯码自动译码系统设计与研究198. 基于199. 基200. 基的μC/OS-Ⅱ的研究201. 的一体化智能差示扫描量热仪系统研究协议的单片机与Internet互联的研究与实现单片机操纵器的研究γ-免疫计数器自动换样功能的研究与实现于单片机的倒立摆操纵系统设计与实现206. 单片机嵌入式以太网防盗报警系统207. 基于51单片机的嵌入式Internet系统的设计与实现208. 单片机监测系统在挤压机上的应用209. MSP430单片机在智能水表系统上的研究与应用210. 基于单片机的嵌入式系统中TCP/IP协议栈的实现与应用211. 单片机在高楼恒压供水系统中的应用212. 基于ATmega16单片机的流量操纵器的开发213. 基于MSP430单片机的远程抄表系统及智能网络水表的设计篇二:最新单片机毕业设计,电子毕业设计题目大全一单片机毕业设计题目,电子毕业设计题目1. 单片机接入Internet技术在智能小区中的应用与研究2. 基于PIC单片机的高压智能同步开关操纵系统设计3. 基于单片机的刚性转子现场动平稳测试系统的研制4. 基于单片机的现场多道核能谱数据搜集系统研究5. 单片机模糊操纵晶闸管直流调压系统的研究6. 单片机嵌入式TCP/IP协议的研究与实现7. 基于单片机的几何参数主动量仪和通用测控仪的研制8. 基于C8051单片机的足球机械人小车操纵系统设计9. 利用FPGA模拟实现8051单片机及其外设的功能10. 用于TDMoIP实现的E〈,1〉功能卡单片机操纵研究11. 基于MSP430单片机的数字式压力表的设计与实现12. 基于CAN总线的单片机流量操纵系统的研究13. 单片机和嵌入式系统开发平台化的研究14. 基于单片机语音识别系统设计15. 基于80C196KC单片机的舞蹈机械人操纵系统16. 基于单片机的工业缝纫机操纵系统研制17. 基于单片机的智能稳压电源18. PIC单片机中国市场拓展战略19. 基于FPGA与单片机的高精度电子经纬仪光电信号处置系统研制20. 基于网络单片机21. 基于“单片机+CPLD/FPGA机系统集成化设计22. ——单片机信号搜集及其通信操纵系统研究部份23. 弧焊逆变电源24. 单片机25. 单片机26. 单片机的研究与实现27. 单片机应用28. 基于机自动调平操纵器的研究机系统设计单片机的web效劳器的设计与实现语言的单片机设计实现的仿人智能PID操纵器基于单片机的船舶柴油机冷却水温度操纵系统34. 基于单片机的活性炭测氡仪的研制35. 单片机静脉麻醉靶控输注系统的研制与应用36. 基于PC+单片机的环境风洞风速操纵系统的研究37. 基于CPLD和单片机的爆轰波数据搜集系统设计38.基于单片机和DSP的卷绕操纵器数据搜集和通信设计39. 基于MSP430单片机的柴油发电机监控器的设计40. 基于CPLD/FPGA和单片机的爆速仪设计41. 基于单片机操纵的晶闸管中频感应电源的研制42. 基于十六位单片机的电力设备故障在线监测装置的设计与算法研究43. 基于SPCE061A单片机的语音识别系统的研究44. 基于PIC单片机的生物性能实验装置的研究45. 基于Motorola MC68HC08系列单片机演示系统的设计与实现46. 基于TCP/IP协议的单片机与INTERNET互连的设计与实现47. 基于嵌入式实时操作系统和TCP/IP协议的单片机测控系统48. AVR 8位嵌入式单片机在车载全世界定位系统显示终端中的应用49. 基于AVR单片机的250W HID灯电子镇流器的研究50. 基于单片机的TCP/IP技术研究及应用51. 基于P87C591单片机的CAN总线应用层协议的研究52. 基于单片机实现对二级倒立摆的操纵53. C8051FXXX系列单片机仿真器的研制54. 基于80C196MC单片机55. 基于单片机的胶印机操纵系统开发研究56. 基于凌阳单片机的二次压降全自动测量仪的研制57. 基于单片机的超声测距系统58. 基于MOTOROLA单片机的专用电池组智能充电仪59. 全站仪动态测量的研究和其与单片机在轨道式龙门吊实时检测中的应用60. 一种基于80C196KC单片机的新型电子负载的设计61. 基于单片机的对讲系统的研究开发62. 基于单片机的微波加热沥青路面再生修复机温度操纵器的开发与研究63. 基于单片机ATmega128的嵌入式工业操纵器设计64. 基于单片机的压电闭环微位移操纵系统的研究65. 基于单片机的高压静电除尘整流设备的自动监控系统设计66. 采纳W78E58单片机的酸碱浓度检测技术67. 基于单片机的粮库温度监控系统设计68. 基于单片机操纵的微型轴流式血泵外磁驱动系统研究69. 基于AVR单片机的电动自行车操纵系统研究70. 基于PIC单片机的配电网综合参数测控仪研究71. 全自动包装机的单片机操纵研究72. 基于单片机系统的Java虚拟机研究与设计73. 基于智能传感器和单片机的温度监测系统74. 基于DSP和单片机的数据搜集与处置系统的设计75. 基于单片机的在线测试技术的研究76. 分散式智能测控终端的研制——基于单片机计实现77. 基于单片机的定尺飞锯切割机操纵系统设计78. 基于196单片机的开关磁阻电机79. 基于EDA技术的兼容MCS-51单片机80. 基于单片机的嵌入式USB主机81. 单片机82. 基于MSP430单片机的微机83. 基于MSP430单片机机调速器的设计与研制84. 基于单片机85. 基于单片机和CAN86. 基于单片机87. 工程机88. 基于单片机89. 基于90. 基于91. 宏汇编器的设计与实现的轧机实验台散布式监测系统研究的DDD心脏起搏器的设计单片机的设计基于单片机操纵的能量回馈操纵系统的研究基于单片机的步进电机式汽车仪表的设计与实现97. 基于微功耗单片机的水声遥控系统的研究98. 面向单片机接口的新型液晶显示操纵器的研制99. 基于单片机操纵的水下脉动送丝焊接电源的研究100. 单片机在汽车制动性能检测系统中的应用101. 基于单片机操纵的MAG焊逆变电源的研究102. 基于单片机AT89C2051光电鼠标位移检测系统的研究103. 基于MSP430单片机的多功能TIG焊操纵器104. 基于单片机的柴油发动机冷却水温操纵系统的研究105. 单片机操纵的节水浇灌系统的研究106. 80C196KC单片机中子和γ综合电离辐射效应研究107. 汽油箱内汽油蒸汽利用的单片机操纵研究108. 基于单片机的鸡蛋破损检测系统研究109. 基于C8051单片机的圆轨倒立摆操纵系统设计110. 基于单片机的嵌入式Web效劳器在远程故障诊断中的应用111. 基于多机通信的AVR单片机高级用户板的设计与开发112. MC68HC908单片机在发动机台架实验中的应用研究113. 单片机操纵的可并联组合的高频开关型变流组件研究114. 小型家用燃气锅炉单片机操纵系统的研究115. 基于PIC单片机的海水有机磷实时数据搜集与操纵系统116. 基于AVR单片机的石油倾点自动测量系统设计117. 基于单片机的直接数字频率合成(DDS)技术的应用研究118. 单片机模糊操纵在电加热炉温度操纵系统中的应用119. PIC单片机芯片在电涡流传感器温度补偿中的应用120. 基于C8051F单片机直流电动机121. 基于单片机的嵌入式Web效劳器的研究122. MOTOROLA单片机MC68HC(8)EEPROM的工艺和制程方式及对良率的阻碍研究123. 基于模糊操纵的电阻钎焊单片机124. 基于MCS-51系列单片机125. 基于单片机STR)调剂器126. 单片机127. 基于增强型51系列协议栈的实现128. 基于单片机129. 基于32130. 基于单片机131. 基于机运动操纵系统研究与开发132. 基于133. 基于134. 基单片机的嵌入式系统开发的液压动力系统状态监测仪开发智能操纵方式的研究及其单片机实现单片机的轴快流CO〈,2〉激光器的手持操纵面板的研制基于双单片机冲床数控系统的研究基于CYGNAL单片机的在线间歇式浊度仪的研制140. 基于单片机的喷油泵实验台操纵器的研制141. 基于单片机的软起动器的研究和设计142. 基于单片机操纵的高速快走丝电火花线切割机床短循环走丝方式研究143. 基于单片机的机电产品操纵系统开发144. 基于PIC单片机的智能电话充电器145. 基于单片机的实时内核设计及其应用研究146. 基于单片机的远程抄表系统的设计与研究147. 基于单片机的烟气二氧化硫浓度检测仪的研制篇三:本科毕设题目(单片机相关)单片机毕业设计题目,电子毕业设计题目1. 单片机接入Internet技术在智能小区中的应用与研究2. 基于PIC单片机的高压智能同步开关操纵系统设计3. 基于单片机的刚性转子现场动平稳测试系统的研制4. 基于单片机的现场多道核能谱数据搜集系统研究5. 单片机模糊操纵晶闸管直流调压系统的研究6. 单片机嵌入式TCP/IP协议的研究与实现7. 基于单片机的几何参数主动量仪和通用测控仪的研制8. 基于C8051单片机的足球机械人小车操纵系统设计9. 利用FPGA模拟实现8051单片机及其外设的功能10. 用于TDMoIP实现的E〈,1〉功能卡单片机操纵研究11. 基于MSP430单片机的数字式压力表的设计与实现12. 基于CAN总线的单片机流量操纵系统的研究13. 单片机和嵌入式系统开发平台化的研究14. 基于单片机语音识别系统设计15. 基于80C196KC单片机的舞蹈机械人操纵系统16. 基于单片机的工业缝纫机操纵系统研制17. 基于单片机的智能稳压电源18. PIC单片机中国市场拓展战略19. 基于FPGA与单片机的高精度电子经纬仪光电信号处置系统研制20. 基于网络单片机的嵌入式远程监控系统研究21. 基于“单片机+CPLD/FPGA体系结构”的程控互换机系统集成化设计22. 智能温室环境操纵系统的设计与实验研究——单片机信号搜集及其通信操纵系统研究部份23. 弧焊逆变电源单片机操纵系统的稳固性研究24. 单片机系统仿真—对用户的软、硬件系统运行进程仿真25. 单片机系统仿真—生成用户硬件电路和汇编语言程序的故障诊断26. 单片机嵌入TCP/IP的研究与实现27. 雷达模拟器中的单片机应用28. 基于单片机的沥青摊铺机自动调平操纵器的研究29. 单片机操纵逆变埋弧焊机系统设计30. 基于sx52单片机的web效劳器的设计与实现31. 基于VHDL语言的单片机设计32. 单片机实现的仿人智能PID操纵器33. 基于单片机的船舶柴油机冷却水温度操纵系统34. 基于单片机的活性炭测氡仪的研制35. 单片机静脉麻醉靶控输注系统的研制与应用36. 基于PC+单片机的环境风洞风速操纵系统的研究37. 基于CPLD和单片机的爆轰波数据搜集系统设计38. 基于单片机和DSP的卷绕操纵器数据搜集和通信设计39. 基于MSP430单片机的柴油发电机监控器的设计40. 基于CPLD/FPGA和单片机的爆速仪设计41. 基于单片机操纵的晶闸管中频感应电源的研制42. 基于十六位单片机的电力设备故障在线监测装置的设计与算法研究43. 基于SPCE061A单片机的语音识别系统的研究44. 基于PIC单片机的生物性能实验装置的研究45. 基于Motorola MC68HC08系列单片机演示系统的设计与实现46. 基于TCP/IP协议的单片机与INTERNET互连的设计与实现47. 基于嵌入式实时操作系统和TCP/IP协议的单片机测控系统48. AVR 8位嵌入式单片机在车载全世界定位系统显示终端中的应用49. 基于AVR单片机的250W HID灯电子镇流器的研究50. 基于单片机的TCP/IP技术研究及应用51. 基于P87C591单片机的CAN总线应用层协议的研究52. 基于单片机实现对二级倒立摆的操纵53. C8051FXXX系列单片机仿真器的研制54. 基于80C196MC单片机操纵的变频调速及配料操纵系统的应用研究55. 基于单片机的胶印机操纵系统开发研究56. 基于凌阳单片机的二次压降全自动测量仪的研制57. 基于单片机的超声测距系统58. 基于MOTOROLA单片机的专用电池组智能充电仪59. 全站仪动态测量的研究和其与单片机在轨道式龙门吊实时检测中的应用60.一种基于80C196KC单片机的新型电子负载的设计61. 基于单片机的对讲系统的研究开发62. 基于单片机的微波加热沥青路面再生修复机温度操纵器的开发与研究63. 基于单片机ATmega128的嵌入式工业操纵器设计64. 基于单片机的压电闭环微位移操纵系统的研究65. 基于单片机的高压静电除尘整流设备的自动监控系统设计66. 采纳W78E58单片机的酸碱浓度检测技术67. 基于单片机的粮库温度监控系统设计68. 基于单片机操纵的微型轴流式血泵外磁驱动系统研究69. 基于AVR单片机的电动自行车操纵系统研究70. 基于PIC单片机的配电网综合参数测控仪研究71. 全自动包装机的单片机操纵研究72. 基于单片机系统的Java虚拟机研究与设计73. 基于智能传感器和单片机的温度监测系统74. 基于DSP和单片机的数据搜集与处置系统的设计75. 基于单片机的在线测试技术的研究76. 分散式智能测控终端的研制——基于单片机的大容量固态存储技术的设计实现77. 基于单片机的定尺飞锯切割机操纵系统设计78. 基于196单片机的开关磁阻电机调速系统设计79. 基于EDA技术的兼容MCS-51单片机IP核设计80. 基于单片机的嵌入式USB主机研究与实现81. 单片机操纵持续固体激光器高频开关电源的研制82. 基于MSP430单片机的微机自动准同期装置83. 基于MSP430单片机中小型水轮机微机调速器的设计与研制84. 基于单片机的便携式心电监测系统的研究85. 基于单片机和CAN总线的混凝土搅拌站操纵系统设计86. 基于单片机的全位置自动焊接操纵系统的研究87. 工程机械冷却能力单片机操纵系统88. 基于单片机的电除尘集散操纵系统的并行数据搜集89. 基于单片机的磁酶免测定仪的研制90. 基于单片机的籽棉动态称重系统91. ZLG51单片机宏汇编器的设计与实现92. 基于单片机的轧机实验台散布式监测系统研究93. 基于单片机的DDD心脏起搏器的设计94. 来电显示单片机的设计95. 基于单片机操纵的能量回馈操纵系统的研究96. 基于单片机的步进电机式汽车仪表的设计与实现97. 基于微功耗单片机的水声遥控系统的研究98. 面向单片机接口的新型液晶显示操纵器的研制99. 基于单片机操纵的水下脉动送丝焊接电源的研究100. 单片机在汽车制动性能检测系统中的应用101. 基于单片机操纵的MAG焊逆变电源的研究102. 基于单片机AT89C2051光电鼠标位移检测系统的研究103. 基于MSP430单片机的多功能TIG焊操纵器104. 基于单片机的柴油发动机冷却水温操纵系统的研究105. 单片机操纵的节水浇灌系统的研究106. 80C196KC单片机中子和γ综合电离辐射效应研究107. 汽油箱内汽油蒸汽利用的单片机操纵研究108. 基于单片机的鸡蛋破损检测系统研究109. 基于C8051单片机的圆轨倒立摆操纵系统设计110. 基于单片机的嵌入式Web效劳器在远程故障诊断中的应用111. 基于多机通信的AVR单片机高级用户板的设计与开发112. MC68HC908单片机在发动机台架实验中的应用研究113.。

基于单片机的智能小车设计基于单片机的智能小车设计1. 简介1.1 背景1.2 目的1.3 系统概述2. 硬件设计2.1 单片机选择与配置2.2 传感器选择与接口设计2.3 驱动电机选择与接口设计2.4 继电器与开关设计2.5 供电系统设计2.6 小车外观设计3. 软件设计3.1 系统架构设计3.2 传感器数据处理算法3.3 控制算法设计3.4 用户界面设计3.5 数据存储与处理4. 小车功能设计4.1 行进控制功能设计 4.2 避障功能设计4.3 跟随功能设计4.4 摄像功能设计4.5 远程控制功能设计4.6 音频播放功能设计5. 系统测试与调试5.1 单元测试5.2 集成测试5.3 系统性能测试6. 生产与制造6.1 原材料选择与采购 6.2 制造流程设计6.3 质量控制与检测7. 成本估算与商业化7.1 材料成本估算7.2 劳动力成本估算7.3 研发成本估算7.4 价格策略7.5 市场推广与销售渠道8. 维护与售后服务8.1 维护计划8.2 售后服务政策8.3 售后服务流程9. 风险评估与合规性要求 9.1 安全风险评估9.2 法规合规性要求10. 附件10.1 电路图10.2 PCB设计图10.3 软件代码11. 法律名词及注释- 单片机: 是一种集成电路,包含了微处理器、存储器和输入/输出接口等功能。
- 传感器: 是一种能够感知环境信息并将其转化为可用电信号的设备。
- 驱动电机: 是将电源提供的电能转化为机械能的设备。
- 继电器: 是一种电控开关,通过电磁原理实现电流的开关控制。
- 开关: 用于控制电流的开关设备。
- 供电系统: 提供电力给电子设备的系统,包括电源、电池等部分。
- 用户界面: 提供用户与系统之间交互的界面。
- 数据存储与处理: 将数据存储到内存中,并进行相关的处理与分析。
- 单元测试: 对系统各个模块进行独立测试。
- 集成测试: 将各个模块进行集成测试,验证其功能是否正常。

基于80C51的电动智能单片机摘要80C51单片机是一款八位单片机,它的易用性和多功能性受到了广大使用者的好评。
这里介绍的是如何用80C51单片机来实现长春工业大学的毕业设计,该设计是结合科研项目而确定的设计类课题。
本系统以设计题目的要求为目的,采用80C51单片机为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,自动寻迹和寻光功能。
整个系统的电路结构简单,可靠性能高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
采用的技术主要有:(1)通过编程来控制小车的速度;(2)传感器的有效应用;(3)新型显示芯片的采用.关键词80C51单片机、智能、光电检测器、PWM调速、电动小车Design and create an intelligence electricity motive small carAbstract80C51 is a 8 bit single chip computer. Its easily using and multi-function suffer large users. This article introduces the CCUT graduation design with the 80C51 single chip computer. This design combines with scientific research object. This system regards the request of the topic, adopting 80C51 for controlling core, super sonic sensor for test the hinder. It can run in a high and a low speed or stop automatically. It also can record the time, distance and the speed or searching light and mark automatically the electric circuit construction of whole system is simple, the function is dependable. Experiment test result satisfy the request, this text emphasizes introduced the hardware system designs and the result analyze.The adoption of technique as:(1)Reduce the speed by program the engine;(2)Efficient application of the sensor;(3)The adoption of the new display chip.Keywords 80C51 single chip computer, light electricity detector, PWM speed adjusting, Electricity motive small car目录第一章前言 (1)第二章方案设计与论证 (3)一直流调速系统 (3)二检测系统 (4)三显示电路 (9)四系统原理图 (9)第三章硬件设计 (10)一 80C51单片机硬件结构 (10)二最小应用系统设计 (11)三前向通道设计 (12)四后向通道设计 (15)五显示电路设计 (17)第四章软件设计 (20)一主程序设计 (20)二显示子程序设计 (24)三避障子程序设计 (25)四软件抗干扰技术 (26)五“看门狗”技术 (28)六可编程逻辑器件 (29)第五章测试数据、测试结果分析及结论 (30)致谢 (31)参考文献 (32)附录A 程序清单 (33)附录B 硬件原理图 (41)第一章前言随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。

基于单片机智能遥控小车的设计现今的智能遥控小车在各个领域都有广泛的应用,如家庭娱乐、安防巡检、仓库物流等。
在这篇文章中,我们将讨论基于单片机的智能遥控小车的设计。
首先,我们需要选择适合的单片机作为主控制器。
目前市面上最常用的单片机有Arduino、Raspberry Pi等。
Arduino是一种开源电子原型平台,其特点是体积小巧、易于编程。
Raspberry Pi是一款基于ARM架构的微型计算机,具有与PC相似的性能。
在选择单片机时,我们需要考虑到所需功能的复杂度,并根据需求选择适合的处理器。
接下来,我们需要设计小车的底盘。
底盘一般由两个驱动电机和轮子组成,可以使用直流电机或步进电机。
直流电机通常用于需要更高速度和功率的应用,而步进电机适用于需要更精确运动和控制的应用。
在选择电机时,我们需要考虑小车的负载能力和运动需求,并选择合适的电机类型。
为了实现遥控功能,我们需要添加无线通信模块。
常见的无线通信模块有蓝牙、Wi-Fi和红外线模块等。
蓝牙模块可以实现长距离通信和高速传输,适用于需要远程操控的应用。
Wi-Fi模块可以实现无线网络连接和上传数据,适用于需要实时监控和远程控制的应用。
红外线模块可以实现近距离通信和简单的遥控功能,适用于低成本和简单的应用。
在设计电路时,我们需要考虑电源管理和传感器的接入。
智能遥控小车通常需要稳定的电源供应,可以使用电池,或将电源直接接入插座。
在接入电源时,我们需要添加合适的电压调节器和电流保护模块,以确保电路的安全运行。
此外,我们还可以添加各种传感器,如超声波传感器、红外线传感器和摄像头等,以实现遥测和环境感知功能。
软件方面,我们需要为单片机编写应用程序。
根据单片机的选择,我们可以使用相应的编程语言和集成开发环境。
Arduino通常使用C/C++编程语言和Arduino开发环境,Raspberry Pi可以使用Python和Linux操作系统。
在编写程序时,我们需要实现与无线通信模块的通信,控制电机和传感器的运行,以及处理接收到的指令。
单片机多功能智能小车摘要在当今的社会,“智能化”这个词汇越来越多地被别人所提及,各种智能化产品的出现极大地改变了人们的生活,智能化已经成为世界未来发展的趋势。
智能化可以按照人类的意愿进行运作,并且不需要人类进行太大的操作,这便大大减小了人们的工作量。
智能小车的出现便是人类向智能化迈出的一大步,它的出现极大地加快了科学勘探、工业制造和交通运输等领域的发展。
智能小车的原理中包含了许多的学科知识,例如传感技术、自动控制原理、遥感技术和电路电子等。
本设计的智能小车采用的控制核心为STC89C52单片机,遥控的方式为红外遥控,电机驱动的芯片为L293D。
同时智能小车采用了红外对管作为红外避障模块与红外寻迹模块的接收和发射装置,通过HC-SR04超声波探测模块进行测距避障,测量到的距离则由1602液晶显示。
本次设计采用的编程语言为c语言,通过将编好的程序输入到单片机,单片机便能控制小车实现红外避障、超声波测距避障、黑线寻迹和红外遥控等功能。
关键词:智能车单片机红外避障与遥控超声波黑线寻迹AbstractIn today's society, the term "intelligent" is increasingly mentioned by others. The emergence of various intelligent products has greatly changed people's lives, and intelligentization has become the trend of the world's future development. Intelligentization can operate according to the wishes of human beings, and does not require humans to perform too much operations, which greatly reduces the workload of people. The emergence of smart cars is a big step for human beings to become intelligent. Its appearance has greatly accelerated the development of scientific exploration, industrial manufacturing and transportation and other fields. The principle of the smart car contains many subject knowledge, such as sensing technology, automatic control principle, remote sensing technology and circuit electronics. The control core adopted by the designed smart car is STC89C52 single chip microcomputer, the remote control mode is infrared remote control, and the chip driven by the motor is L293D. At the same time, the smart car adopts the infrared pair tube as the receiving and transmitting device of the infrared obstacle avoidance module and the infrared tracking module, and performs the distance measurement and obstacle avoidance through the HC-SR04 ultrasonic detection module. The programming language used in this design is c language. By inputting the compiledprogram to the single-chip microcomputer, the single-chip microcomputer can control the car to realize infrared obstacle avoidance, ultrasonic distance measurement obstacle avoidance, black line tracking and infrared remote control.Keywords: smart car; single chip microcomputer; infrared obstacle avoidance and remote control; ultrasonic; black line tracking目录1 前言 (1)1.1 本设计的目的、意义及应达到的技术要求 (1)1.2 本设计在国内外的发展概况及存在的问题 (2)1.3 本设计应解决的主要问题 (3)2本设计 (3)2.1 设计原理 (4)2.2方案选择 (4)2.2.1 遥控控制模块设计与论证 (4)2.2.2电机驱动模块设计与论证 (5)2.2.3避障循迹模块设计与论证 (5)2.2.4电源模块设计与论证 (6)2.2.5数据显示模块设计与论证 (6)2.3分析问题 (7)2.4设计过程 (7)2.4.1 红外遥控模块 (7)2.4.1.1 红外遥控模块的工作原理 (7)2.4.2电机驱动模块 (8)2.4.2.1 L293D电机驱动芯片工作原理 (8)2.4.2.2电机调速 (9)2.4.3避障循迹模块 (10)2.4.3.1红外避障循迹模块 (10)2.4.3.2超声波测距避障模块 (12)2.4.4 电源模块 (15)2.4.5 数据显示模块 (15)2.5 总结 (16)参考文献 (18)致谢 (19)附录 (20)1 前言随着智能小车的不断发展,它在人类生活中起到的作用也越来越大,被普遍用于生产、运输、自动化、医疗和航空等各个领域。
基于51单片机的循迹小车系统设计摘要80C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。
在生活中但凡涉及到自动控制的地方都会出现单片机的身影,单片机的应用有利于产品的小型化、智能化,并且能够提高生产效率.这里介绍的是如何用AT89C52单片机来实现小车的循迹功能,该设计是结合科研项目而确定的设计类课题。
本系统以设计题目的要求为目的,采用AT89C52单片机为控制核心,利用红外传感器检测道路上的黑线,控制电动小汽车的自动循迹,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,和寻光功能。
整个系统的电路结构非常简单,可靠性能很高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
关键词:80C51单片机;电动小车;pwm调速;光电检测;自动调速系统Car tracking system based on microcontrollerAbstract80C51 is a 8 bit single chip computer。
Its easily using and multi—function suffer large users。
In life,whenever it comes to automatic control of the local microcontroller will appear figure, microcontroller applications in favor of product miniaturization,intelligent,and can improve productivity. Here is how to use AT89C52 microcontroller to achieve the car tracking feature, which is designed to determine the combination of scientific research and design class topic.This system design requirements of the subject for the purpose of using AT89C52 microcontroller core,the use of infrared sensors to detect the black line on the road,the automatic tracking control of electric cars,fast low traffic speeds,as well as automatic parking, and can automatically record time ,mileage and speed, and look for the light function.The circuit structureof the entire system is very simple, very high reliability. The test results meet the requirements,the paper focuses on the hardware design and test results of the system analysis.Keywords:80C51 microcontroller;Electric car Pwm speed; A photodetector;Automatic Speed Control System。
第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
移动机器人是机器人学中的一个重要分支,出现于20世纪06年代。
当时斯坦福研究院(SRI)的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。
从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注。
智能小车,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航及白动控制等技术,是典型的高新技术综合体。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:(1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作;(2)摄像机,用来获得道路图像信息;(3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆技术按功能可分为三层,即智能感知/预警系统、车辆驾驶系统和全自动操作系统团。
上一层技术是下一层技术的基础。
三个层次具体如下:(1)智能感知系统,利用各种传感器来获得车辆自身、车辆行驶的周围环境及驾驶员本身的状态信息,必要时发出预警信息。
主要包括碰撞预警系统和驾驶员状态监控系统。
碰撞预警系统可以给出前方碰撞警告、盲点警告、车道偏离警告、换道/并道警告、十字路口警告、行人检测与警告、后方碰撞警告等.驾驶员状态监控系统包括驾驶员打吨警告系统、驾驶员位置占有状态监测系统等。
基于单片机的红外遥控智能小车设计引言:随着科技的不断发展,智能物联网已经走进了我们的生活。
智能小车作为一种智能化的产品,能够实现远程遥控、自动避障等功能,受到了广大消费者的青睐。
本文就基于单片机的红外遥控智能小车设计进行详细介绍。
一、设计目标本设计的目标是通过红外遥控,实现对智能小车的远程控制,小车能够根据收到的指令进行行驶、避障等操作。
二、设计原理1.主控芯片:本设计使用单片机作为主控芯片,常用的单片机有51系列、AVR系列等,可根据实际需求选择合适的芯片型号。
2.红外遥控模块:红外遥控模块是实现红外通信的设备,可以将遥控器发出的红外信号解码成数据,实现遥控操作。
3.电机驱动模块:电机驱动模块可将单片机的PWM信号转化为电机的动力驱动信号,控制小车的行驶方向和速度。
4.超声波传感器:超声波传感器可以感知到小车前方的障碍物距离,根据测得的距离,进行相应的避障操作。
5.电源模块:小车需要使用适当的电源,通常是锂电池或者直流电源供应。
三、系统设计1.硬件设计:(1)搭建小车底盘:根据所选择的底盘,搭建小车结构,并安装好电机驱动模块、电源模块等硬件设备。
(2)连接电路:将红外遥控模块、超声波传感器等硬件设备与主控芯片进行连接,确保每个模块正常工作。
2.软件设计:(1)红外遥控程序设计:通过红外遥控模块接收红外信号,并解码成相应的指令。
根据指令控制电机驱动模块,实现小车的行驶方向和速度控制。
(2)超声波避障程序设计:根据超声波传感器测得的距离,判断是否有障碍物,如果有障碍物就停止或者转向。
四、实验结果和讨论经过实验验证,本设计的红外遥控智能小车能够准确接收红外信号,并根据指令控制小车的行驶方向和速度。
同时,超声波传感器能够及时感知到前方的障碍物,并进行相应的避障操作。
然而,该设计仍然存在一些不足之处,比如超声波传感器的测距范围有限,可能无法感知到较小的障碍物。
此外,红外遥控信号的传输距离也有一定限制,需要保持遥控器与小车之间的距离不过远。
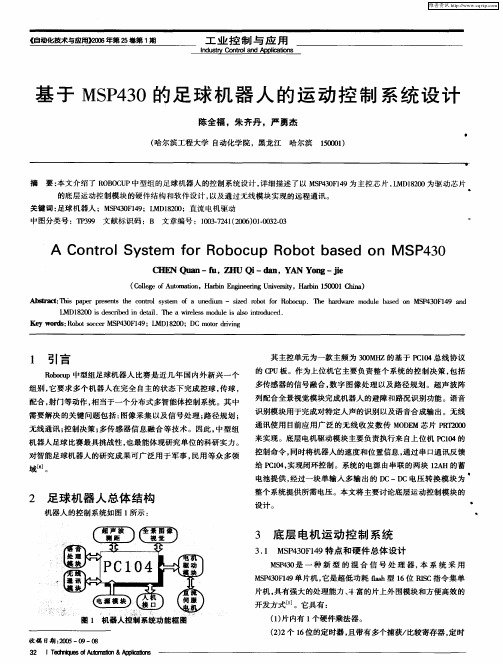
中图分类:TP273 密级:无UDC:单位代码:基于单片机的足球机器人小车系统设计Car System Design of Soccer RobotBased on SCM姓名李小朋学制3年专业电气自动化技术研究方向自动化技术导师赵路民职称工程师论文提交日期2008.5.25 论文答辩日期 2008.6.2焦作大学焦作大学毕业设计摘要摘要足球机器人是人工智能与机器人领域极富挑战性的高技术密集项目,它涉及机械、计算机、自动化、电子、传感器信息、图象处理、无线网络等高技术。
同时又是人工智能技术的一个理想突破点。
机器人踢足球,看似游戏,其实展示了一个国家信息和自动化技术的综合实力。
足球机器人系统在许多领域有着广泛的应用前景,比如,高校和科研院所的教学和科研;无人驾驶飞机群的编队控制及与敌方的辅助攻防对抗等,国内许多高校都开展了机器人足球的研究,并自1999年起分别在哈尔滨工业大学、上海交大等高校成功地举行了数次全国机器人足球竞赛,但我国的中型组足球机器人比赛所用的平台都是从国外进口,所谓的比赛只能称之为软件上的对抗。
本次设计从最基本的硬件开发做起,在原有的基础上进行了一系列的改进,设计依然采用MCS-51单片机作为足球机器人的微处理器,它结构简单,性能稳定,引脚数量多。
小车的驱动方面有采用双电机做为动力,四轮配置,PWM调速,使机器人的机动性能、灵活性、灵敏度等都有了大副度的提高;赛场的信息采集使用了并行口A/D模数转换,使得机器人对赛场信息把握更为及时;小车的通讯方面,采用了BIM-418(433)-F无线收发模块,使机器人足球队整体配合更为默契。
软件方面用C语言来编写,为以后的小车系统改进提高打下基础。
关键词:足球机器人小车;单片机;PWM调速;A/D数模转换1焦作大学毕业设计AbstractAbstractSoccer robots and artificial intelligence robot is a very challenging field of high technology-intensive projects, involving machinery, computer, automation, electronics, sensors, image processing, wireless networks, and other high-tech. At the same time artificial intelligence technology is a good breakthrough. Robot soccer, the game appears, in fact, display a national information and automation technology's overall strength. Soccer Robot system in many areas have a wide application, for example, universities and research institutes of teaching and scientific research, unmanned aircraft and the control group and the formation of supporting the enemy offensive and defensive combat, many domestic colleges and universities have developed machines A-side soccer studies, and since 1999, in Harbin Institute of Technology, Shanghai Jiaotong University and other colleges and universities successfully held a number of National Robot Soccer Competition, but our group of medium-sized robot soccer competition using the platform are imported from abroad, Competition can only be referred to as the so-called software on the confrontation.The basic design of the hardware development from the start, in the original on the basis of a series of improvements, the design still used as a SCM MCS-51 soccer robot's microprocessor, its structure is simple, stable performance, Reply Large number of feet. Trolley drivers have a dual motor as a driving force, four-wheel configuration, PWM speed control so that the robot's mobility, flexibility, sensitivity and so has the University Pro-Vice-degree improvement in the information collection stadium used the parallel port A / D analog-digital conversion, making the stadium robot grasp more timely information; vehicle of communication, using a BIM-418 (433)-F wireless transceiver modules, the robot soccer team as a whole with more understanding. C-language software used to prepare for the future of the trolley system to lay a foundation for improving the increase.Keyword: Robot Soccer car, SCM, PWM speed control, A / D DAC2焦作大学毕业设计目录目录摘要 (1)Abstract (2)1 足球机器人的总体设计 (1)1.1引言 (1)1.2机器人的总体介绍 (1)1.3机器人移动方式的选择 (1)1.4机器人电路硬件选择 (2)1.5传感器元件及转换元件选择 (2)1.6机器人运行算法的构想 (3)2 动力驱动及硬件电路设计 (7)2.1 动力驱动部件与运动方式设计 (7)2.2机器人的车轮配置和操舵方式 (7)2.3 硬件电路设计 (8)2.3.1机器人系统结构 (8)2.3.2主控部分硬件电路[3] (9)2.3.3传感器部分硬件电路 (12)2.3.4电源供应部分 (16)2.4.1无线电线通讯接收系统 (21)3 足球机器人的软件设计 (23)3.1 A/D转换器的读写控制模块[8] (23)3.2运动控制程序模块 (24)3.2.1程序原理 (24)3.2.2 运动控制模块 (24)3.3找球程序模块 (26)3.3.1编程思路 (26)3.3.2找球程序流程图 (26)3.3.3用C语言编写的程序代码 (27)3.4进攻程序模块 (28)3.4.1编程思路 (28)3焦作大学毕业设计目录3.4.2 进攻程序模块流程图 (29)3.4.5 用C语言编写的程序代码 (30)3.5碰撞避让程序模块 (31)3.5.1碰撞避让程序的硬件实现 (31)3.5.2中断控制设置 (31)3.5.3碰撞系统模块程序 (32)3.6整体程序 (32)4 功能测试 (34)4.1功能测试 (34)4.1.1 找球功能模块测试 (34)4.1.2碰撞功能模块测试 (34)4.1.3 方向判断功能模块测试 (34)5 设计总结 (35)5.1 本设计的优点及创新之处 (35)5.2本设计可改进的方面 (35)参考文献 (36)附录 (37)致谢 (43)4焦作大学毕业设计 1 足球机器人的总体设计1 足球机器人的总体设计1.1引言机器人竞赛是近年来国际上迅速开展起来的一种高科技对抗活动,足球机器人的硬件设计它涉及人工智能、智能控制、机器人、通讯、传感及机构等多个领域的前沿研究和技术融合。
它集高技术、娱乐和比赛于一体,引起了社会的广泛关注和极大兴趣。
目前,国际上推出了各种不同类型的机器人比赛,如机器人足球、机器人舞蹈、机器人相扑、机器人投篮等,其中尤以机器人足球比赛最为引人注目。
足球机器人小车系统作为整个系统的执行机构,其性能好坏对整个起着至关重要的作用。
早期微型足球机器人采用分立元件控制[1],这基本可以满足一般训练和比赛的要求,但也暴露很多的问题,例如运算速度太慢,可靠性低,经常出现故障等等,随着硬件水平的不断提高,越来越多的国内外更高性高的解决方案,如采用 DSP 的方式可以提高运算速度和控制精度,但是由于DSP 结构复杂,采用这种方式的同时也为电路的设计和后续的开发和扩展工作带来了很大的困难。
因此本次设计采用集成度较高的8051 单片机为核心来设计电路,它集成度高、性能稳定、价格低、外围扩展电路丰富、开发周期短等特点。
1.2机器人的总体介绍电气设计要求具有以下功能:无线数字接收、电动驱动及调速、红外检测、障碍、智能协调控制等。
采取了双层PCB板结构,各部件通过屏障电缆连接,金属框架结构。
上层板是CPU板、A/D转换电路、放置电机驱动及接口电路、无线接电路等主要控制电路;中层板是驱动及检测板,放置电机驱动线路及红外检测线路;底层板是电源与电机板,放置两路电源,两套电机及减速系统,两个主动轮和两个从动轮用于保持小车的稳定运行以及场地灰度检测传感器,还有前端控球部件等。
1.3机器人移动方式的选择机器人在地面上移动的方式通常有三种:车轮式、履带式和步行式。
步行移动方式模仿人类或动物的行走机理,用腿脚走路,对环境适应性好,智能程度也相对较高。