自动控制原理课程设计--根轨迹法
- 格式:doc
- 大小:132.00 KB
- 文档页数:8

第4章 根 轨 迹 法根轨迹法是分析和设计线性控制系统的图解方法,使用简便,在控制工程上得到了广泛应用。
本章首先介绍根轨迹的基本概念,然后重点介绍根轨迹绘制的基本法则,在此基础上,进一步讨论广义根轨迹的问题,最后介绍控制系统的根轨迹分析方法。
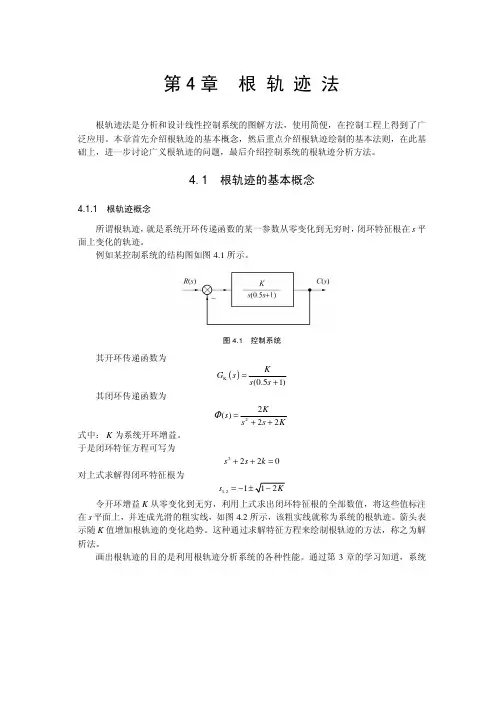
4.1 根轨迹的基本概念4.1.1 根轨迹概念所谓根轨迹,就是系统开环传递函数的某一参数从零变化到无穷时,闭环特征根在s 平面上变化的轨迹。
例如某控制系统的结构图如图4.1所示。
图4.1 控制系统其开环传递函数为()K (0.51)KG s s s =+其闭环传递函数为22()22Ks s s KΦ=++式中:K 为系统开环增益。
于是闭环特征方程可写为2220s s k ++=对上式求解得闭环特征根为1,21s =−令开环增益K 从零变化到无穷,利用上式求出闭环特征根的全部数值,将这些值标注在s 平面上,并连成光滑的粗实线,如图4.2所示,该粗实线就称为系统的根轨迹。
箭头表示随K 值增加根轨迹的变化趋势。
这种通过求解特征方程来绘制根轨迹的方法,称之为解析法。
画出根轨迹的目的是利用根轨迹分析系统的各种性能。
通过第3章的学习知道,系统第4章 根轨迹法·101··101·特征根的分布与系统的稳定性、暂态性能密切相关,而根轨迹正是直观反应了特征根在复平面的位置以及变化情况,所以利用根轨迹很容易了解系统的稳定性和暂态性能。
又因为根轨迹上的任何一点都有与之对应的开环增益值,而开环增益与稳态误差成反比,因而通过根轨迹也可以确定出系统的稳态精度。
可以看出,根轨迹与系统性能之间有着比较密切的联系。
图4.2 控制系统根轨迹4.1.2 根轨迹方程对于高阶系统,求解特征方程是很困难的,因此采用解析法绘制根轨迹只适用于较简单的低阶系统。
而高阶系统根轨迹的绘制是根据已知的开环零、极点位置,采用图解的方法来实现的。
下面给出图解法绘制根轨迹的根轨迹方程。

自动控制原理根轨迹法总结
【根轨迹法概述】
-根轨迹法是分析线性时不变系统稳定性和动态性能的一个重要工具。
它通过在复平面上绘制闭环极点随系统参数变化的轨迹来实现。
【根轨迹法的基本原理】
1. 定义与目的:
-根轨迹是系统开环增益变化时,闭环极点在s平面上的轨迹。
-主要用于分析系统稳定性和设计控制器参数。
2. 绘制原则:
-根据系统开环传递函数,确定轨迹的起点和终点,分支点,穿越虚轴的点等。
-利用角度判据和幅值判据确定根轨迹。
【根轨迹法的应用】
1. 系统稳定性分析:
-根据闭环极点的位置判断系统的稳定性。
-极点在左半平面表示系统稳定,右半平面表示不稳定。
2. 控制器设计:
-调整控制器参数(如比例增益、积分时间常数、微分时间常数等),使根轨迹满足性能指标要求。
-确定合适的开环增益,使闭环系统具有期望的动态性能和稳定裕度。
【根轨迹法的优势与局限性】
-优势:直观、便于分析系统特性,特别是在控制器设计中。
-局限性:仅适用于线性时不变系统,对于非线性或时变系统不适用。
【实践中的注意事项】
-在绘制根轨迹时,应仔细考虑系统所有极点和零点的影响。
-必须结合其他方法(如奈奎斯特法、波特法等)进行综合分析。
【结语】
-根轨迹法是自动控制领域中一种非常有效的工具,对于理解和设计复杂控制系统具有重要意义。
-掌握根轨迹法,能够有效地指导实际的控制系统设计和分析。
编制人:_____________________
日期:_____________________。
根轨迹法校正 课程设计一、课程目标知识目标:1. 学生能够理解根轨迹法的概念,掌握根轨迹的基本绘制方法。
2. 学生能够运用根轨迹法分析控制系统的稳定性,并识别系统的性能指标。
3. 学生能够掌握通过根轨迹法进行控制系统校正的基本原理和步骤。
技能目标:1. 学生能够独立绘制根轨迹图,并分析控制系统的稳定性。
2. 学生能够运用根轨迹法设计简单的控制系统校正方案,提高系统性能。
3. 学生能够通过实际案例,运用所学知识解决控制系统中的实际问题。
情感态度价值观目标:1. 培养学生对自动控制系统的兴趣,激发他们的探究欲望。
2. 培养学生严谨的科学态度,使他们认识到理论知识在实际工程中的重要性。
3. 培养学生的团队协作意识,使他们能够在小组合作中发挥自己的专长,共同解决问题。
课程性质:本课程为自动控制系统相关内容的深化学习,旨在帮助学生掌握根轨迹法校正的基本原理和方法,提高学生分析问题和解决问题的能力。
学生特点:学生已具备一定的自动控制理论知识,具有一定的数学基础和动手能力。
教学要求:结合学生特点,注重理论与实践相结合,通过案例分析和实际操作,使学生能够将所学知识应用于控制系统设计和分析中。
同时,注重培养学生的团队合作能力和创新意识。
在教学过程中,关注学生的学习进度,及时调整教学方法和节奏,确保课程目标的实现。
二、教学内容1. 根轨迹基本概念:根轨迹的定义、意义及其在控制系统中的应用。
- 教材章节:第三章第二节- 内容:根轨迹图的绘制方法、关键点和关键轨迹的特点。
2. 控制系统稳定性分析:利用根轨迹分析系统稳定性,判断系统性能。
- 教材章节:第三章第三节- 内容:稳定性的判定条件、稳定性分析步骤。
3. 根轨迹校正原理:介绍根轨迹法校正控制系统的基础知识。
- 教材章节:第三章第四节- 内容:校正的基本原理、常用校正方法及效果分析。
4. 校正方案设计:结合实际案例,设计控制系统校正方案。
- 教材章节:第三章第五节- 内容:校正方案的设计步骤、参数计算方法、系统性能优化。
自动控制原理综合实验
一.实验目的
1.掌握连续系统的根轨迹法校正设计过程
2.掌握用根轨迹法设计校正装置的方法,并用实验验证校正装置的正确性
3.了解MATLAB 中根轨迹设计器的应用
4.了解零点和极点对一个系统的影响
二.实验内容
设控制系统为单位负反馈系统,开环传递函数为:
()(20)(5)
K G s s s s =++ 试用根轨迹法设计串联超前校正装置,使校正后系统满足:期望开环放大系数K ≥18,0.4s t s ≤ ,%25%σ≤。
三.实验步骤
(1)用鼠标双击MATLAB 图标,进入MATLAB 命令窗口:“Command Window ”.
(2)在“Command Window ”中键入以下程序:
clear;
num1=[1 ];
den1=conv([1 0],conv([1 20],[1 5]));
Gk=tf(num1,den1);
rltool(Gk)
得到如图1所示的开环的根轨迹图形,图1中红色正方形是k =1时闭环系统的极点。
图1
(3)选择Analysis—other loop repsonses点击后如图2所示
图2
图2的设置,表示要观察闭环系统的单位阶跃输入的时域响应曲线。
选择STEP后在右边的Closed-loop下面的r to y打钩,按OK.观察系统的阶跃响应,如图3所示
图3
(4)引入设计规则:添加设计条件,在根轨迹上建立期望极点区域。
在图4的菜单项中,点击Edit>>Root Locus>>Design Constrains>>New,得图5。
图4
在图4所示的界面上设置调节时间。
设置完毕,点击OK,得图5。
图5设置调节时间轨迹设计后的根轨迹
(5)Edit>>Root Locus>>Design Constrains>>New ,得图6。
图6
在图6中,设置超调量的指标为25%。
点击OK,结果如图7所示
图7设置超调量后的根轨迹设计器界面
对比图5,图7多一个边界线,该边界线是由超调量引出的,其含义是系统期望的极点必须是在边界线的左边区域,才能满足该性能指标要求。
综上所述,期望的极点位于同时满足由两个性能指标决定的边界左边区域。
校正设计的目的就是如何把红色正方形(闭环的根)移动到该区域。
由上面可知不管我们如何拉动图中红色的点(闭环的根)系统无法满足我们的要求,前面指出,添加开环零点会使得根轨迹左移,而且如果添加的零点靠近闭环的极点,可以形成偶极子对,那么该零点就可以削弱该闭环极点对系统性能的影响。
故我们可以添加校正装置来让我们的系统满足要求,在这里我们采用的串联超前的校正装置来让系统满足我们的要求,我们加一个趋近于极点的零点。
图8
图8 (6)加了零点的根轨迹如图9所示
图9 (7)我们看下系统的阶跃响应,如图10所示
图10
可知系统是满足我们的要求,我们通过在阴影线的范围内拉倒根轨迹改变K的值来得到我们想要的K值,图中的K值为1.11e+003,明显满足我们的要求。
故我们要加的串联校
正装置可以加一个,满足要求,实验成功。
四.实验总结
通过这次的实验让我掌握连续系统的根轨迹法校正设计过程;掌握用根轨迹法设计校正装置的方法,并用实验验证校正装置的正确性;了解MATLAB中根轨迹设计器的应用;了解零点和极点对一个系统的影响。
通过这次的实验让我们了解了怎样校正一个系统和怎看一个系统的一些性能,如调节时间和超调量等等,通过这次的实验,让我们对根轨迹进一步的了解和加深了我们的知识的联系。
通过这次的实验,使得我对课堂所学自动控制原理的基本理论知识加深理解和应用,熟练掌握利用计算机辅助分析的方法,进一步增强我的分析问题和解决问题的能力。
在进行对系统分析和系统校正中,我体会到使用根轨迹设计器使得分析系统的性能非常直观,同时使得进行系统校正更为方便。
从烦杂的计算转移到关注自动控制原理中系统分析和校正的概念、思想和方法中来,提高分析和解决实际问题的思维能力。
指导教师日期。