伺服压力机控制解决方案
- 格式:pdf
- 大小:4.15 MB
- 文档页数:36
伺服控制方案伺服控制是一种广泛应用于工业自动化领域的控制技术,通过对伺服电机的精确控制,实现对运动系统的高速、高精度定位和运动控制。
伺服控制方案是设计和实施伺服系统的完整计划,包括硬件设备的选择、参数调节、控制算法的设计等。
本文将介绍伺服控制方案的基本原理、主要组成部分以及实施步骤,以期帮助读者全面了解伺服控制技术。
一、伺服控制方案的基本原理伺服控制方案的基本原理是通过反馈控制的方式来实现对系统输出量的精确控制。
在伺服系统中,输出量一般为位置、速度或力矩等,通过传感器将输出量转化为电信号,再通过控制器对电机进行控制,实现对输出量的精确调节。
控制器会根据反馈信号与设定值进行比较,产生误差信号,并通过控制算法计算出控制指令,最终驱动伺服电机实现精确控制。
二、伺服控制方案的主要组成部分1. 伺服电机:伺服电机是伺服系统的核心部件,其具有高精度、高可靠性和高动态特性。
常见的伺服电机包括直流伺服电机和交流伺服电机,根据具体的应用需求选择合适的伺服电机。
2. 传感器:传感器主要用于实时采集系统的输出量,常见的传感器有位置传感器、速度传感器和力矩传感器等。
传感器的选型需要考虑测量范围、精度、抗干扰能力等因素。
3. 控制器:控制器是伺服系统的核心,负责接收来自传感器的反馈信号,并根据设定值进行控制计算。
控制器一般采用数字信号处理器或专用芯片来实现高速、高精度的控制算法。
4. 伺服驱动器:伺服驱动器用于控制伺服电机的运动,将控制器输出的控制指令转化为电流或电压信号,驱动伺服电机实现位置、速度或力矩的调节。
5. 供电系统:供电系统为伺服系统提供稳定的电源,供应电机、传感器和控制器等设备所需的电能。
三、伺服控制方案的实施步骤1. 系统需求分析:根据具体的应用需求,确定伺服系统的输出量、控制精度、运动速度等参数,并选择合适的伺服电机、传感器和控制器等设备。
2. 硬件选型:根据系统需求和技术指标,选择合适的伺服电机、传感器和控制器,并进行硬件连接和安装。
伺服电机控制方案简介伺服电机是一种能够精确控制转速和位置的电机。
它可以根据输入的控制信号,与机械装置进行闭环控制,实现高精度的运动控制。
本文将介绍一种常见的伺服电机控制方案。
控制原理伺服电机的控制原理是通过闭环反馈控制实现的。
系统中的编码器会不断检测电机的转动角度,并将实际转动角度与目标转动角度进行比较。
根据比较结果,控制器会发出控制信号,驱动电机转动,使实际转动角度趋向于目标转动角度。
控制器选择在伺服电机控制方案中,控制器的选择非常重要。
控制器需要有足够的性能来实时处理编码器的反馈信号,并根据反馈信号进行控制。
常见的控制器包括单片机、PLC和DSP等。
控制信号控制器输出的控制信号通常是脉冲信号,用来控制电机的转动。
控制信号的频率和占空比决定了电机的转速和转向。
控制信号通常由控制器的计数器产生。
闭环控制伺服电机控制方案中的核心是闭环控制。
闭环控制通过不断调整控制信号,使得实际转动角度与目标转动角度之间的误差趋向于0。
闭环控制可以通过PID控制算法实现,也可以使用其他算法。
PID控制算法PID控制算法是一种常用的闭环控制算法。
PID是比例、积分和微分三个控制参数的缩写。
用公式表示为:控制信号 = Kp * 偏差 + Ki * 积分项 + Kd * 微分项。
其中,Kp、Ki和Kd是控制参数,偏差是实际转动角度与目标转动角度之间的差值,积分项是偏差的累加值,微分项是偏差的变化率。
实际应用伺服电机广泛应用于工业自动化领域,如机器人、CNC加工设备、印刷设备等。
伺服电机的精确控制能力使得机器人能够执行复杂的任务,CNC加工设备能够实现高精度的加工,印刷设备能够实现高质量的印刷。
总结伺服电机控制方案通过闭环反馈控制实现高精度的运动控制。
控制器选择、控制信号、闭环控制和实际应用是伺服电机控制方案的关键要素。
合理选择控制器,并根据实际需求调整控制参数,可以实现满足要求的伺服电机控制。
以上就是伺服电机控制方案的简要介绍,希望能对您有所帮助。

大型串联伺服压力机典型故障处理及对策大型串联伺服压力机是一种高精度、高效率的压力加工设备。
在使用过程中,可能会出现一些故障,影响设备的正常运行。
为了能够更好地维护和保养大型串联伺服压力机,本文总结了一些典型故障处理及对策。
一、液压系统故障1. 液压系统压力过高或过低:检查液压系统油液是否足够,检查液压系统泵和阀门是否正常。
2. 液压系统温度过高:检查液压系统散热器是否通畅,是否存在冷却水故障。
3. 液压系统压力缓慢上升或下降:检查液压系统泄漏情况,检查压力传感器和压力表的准确性。
二、机械系统故障1. 机械系统振动过大:检查设备是否稳定,检查轴承是否润滑良好,检查传动装置是否松动。
2. 机械系统噪音过大:检查设备是否稳定,检查传动装置是否松动或磨损。
3. 机械系统运行不平稳:检查设备是否稳定,检查传动装置是否松动或磨损,检查机械系统是否平衡。
三、电气系统故障1. 电气系统接线不良:检查电气系统接线是否牢固,是否存在接触不良现象。
2. 电气系统故障:检查电气元件是否正常,检查电气系统是否接地良好。
3. 控制系统故障:检查控制系统软件是否出现故障,检查控制系统硬件是否正常运行。
针对以上故障,可采取如下对策:1. 做好设备的定期维护保养工作,及时更换液压油、润滑油等。
2. 加强对设备的日常巡检,及时发现并处理故障。
3. 对设备进行技术升级,采用先进的控制系统,提高设备的稳定性和可靠性。
4. 在设备出现故障时,可采取相应的紧急处理措施,如停机、排除故障等。
总之,大型串联伺服压力机的故障处理及对策,需要综合考虑液压系统、机械系统和电气系统等多个方面的因素,不断优化设备的运行效率和稳定性,以确保设备能够顺利地完成加工任务。
伺服压力机偏载调试方法伺服压力机是一种利用伺服电机控制液压系统的压力机。
在使用过程中,为了保证设备的工作效率和质量,需要进行偏载调试。
偏载调试是指在没有工作载荷的情况下,对伺服压力机进行调试和优化。
下面将详细介绍伺服压力机偏载调试的方法。
首先,进行系统的初步调整,包括液压系统、伺服电机以及控制系统的参数设定。
液压系统的调整包括调整油泵的压力、速度和流量,确保液压系统的运行平稳。
伺服电机的调整包括调整电机的转速、功率和响应时间等,确保电机的工作效果良好。
控制系统的调整包括调整控制器的增益、反馈和控制信号等,确保控制系统的运行精确。
接下来,进行负载下的程序调整。
在偏载情况下,通过调整控制系统的程序,模拟出工作载荷的情况,检查机械传动、液压控制和电气系统的协调性。
在调整过程中,可以通过改变控制参数来调整伺服系统的运动曲线、速度曲线和力曲线,以实现更加精确的负载调整。
同时,对压力机的运行特性进行测试和分析。
通过测量和分析压力机在不同负载下的压力、速度和力的变化,可以进一步调整和优化控制系统的参数,提高压力机的工作效率和精度。
此外,还可以通过模拟实际工作环境,测试机器在各种工况下的性能和稳定性,以验证机器的负载能力。
最后,进行系统性能测试和调整。
在偏载状态下,进行系统的稳定性、响应速度和界面效果等测试,以评估系统的性能。
根据测试结果,能够进一步调整控制器的参数和算法,提高系统的稳定性和控制精度。
总结来说,伺服压力机的偏载调试是通过系统参数的调整和控制算法的优化,对设备在没有工作载荷下的机械传动、液压控制和电气系统进行调整和优化的过程。
通过偏载调试,可以提高设备的工作效率和质量,提高设备的生产效益。
伺服控制系统解决方案挑战传统意义上的伺服控制系统按照工程经验即可完成控制系统的设计。
然而,实际应用的需求使得伺服控制系统在跟踪范围、跟踪精度、稳定精度等方面的要求不断提升,设计难度不断加大。
从系统开发的角度来讲,挑战主要体现在:•对被控对象机电模型的认识要更为准确,建立准确的控制对象模型;•对于高精度的伺服控制系统,需要方便地将基于模型的控制器设计方法应用于系统开发中;•需要对伺服控制系统的开发设计结果进行快速的数字仿真和实验验证;•需要将设计结果快速转化实际产品;•需要能够实现机电联合仿真的平台,更好地模拟系统的机械结构特性,解决方案鉴于伺服控制系统开发所面临的挑战,本方案提出基于MATLAB软件和快速仿真原型HiGale的伺服控制系统开发设计方案。
1.伺服控制系统设计平台MATLAB软件包含大量的控制系统建模设计工具箱,基于这些工具箱可以很方便地完成控制系统的建模、设计、分析和数字验证;MATLAB软件下的Simulink环境拥有丰富的基本模块库,便于以拖拽的方式方便地建立控制系统的图形化模型,通过数字仿真不断优化和改善设计结果;通过将MathWorks代码生成工具与先进的实时验证系统集成,可以快速方便地实现快速控制原型,实时地测试验证设计结果。
仿真机HiGale系统是恒润科技开发的一套基于实时半实物仿真技术的控制系统开发及测试的工作平台。
HiGale系统采用了NI公司的PXl机箱与高性能板卡,性能强劲的专用硬件具有高速计算和信号I/O 能力,能够应对各种控制工程和相关应用领域的开发和测试需求,并能保证实验过程中所采集的数据的精度和特性要求。
HiGale系统的软件与MATLAB/Simulink完全无缝连接,在MATLAB/Simulink下搭建的模型可直接下载至Higale中,代替实际系统的控制器,形成控制系统快速控制原型,对控制算法和控制器接口进行测试验证。
2.伺服控制系统开发流程基于MATLAB软件和仿真机HiGale的伺服控制系统开发设计流程如图1所示。
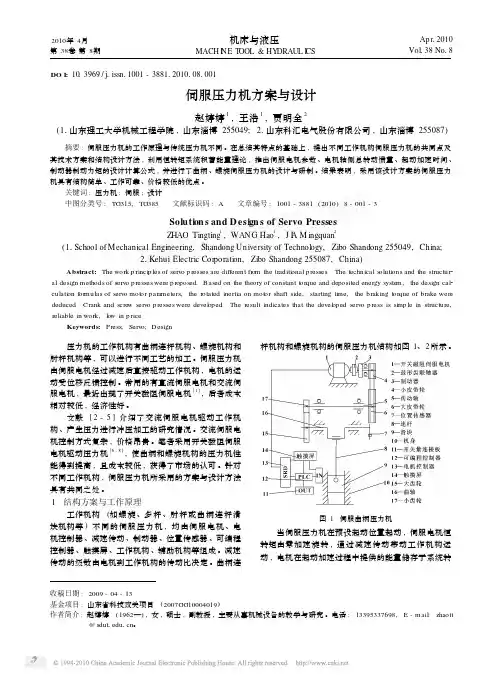
大型伺服压力机典型故障处理及对策摘要:自从大型伺服压力机在广汽丰田安装投入生产使用后,经常会发生各种大的故障。
因此本文主要以大型伺服压力机为例,介绍其工作原理,通过发生的重大典型故障进行分析处理,以此来介绍关于对重大典型故障处理的相关对策。
关键词:滚珠丝杠、伺服马达、减速机、故障处理、对策方法一、大型伺服压力机机械结构和伺服控制SS4-16M-460-215型号的大型伺服压力机,该机型是由日本小松产业机械和丰田汽车株式会社共同开发的。
目的就是为了使压力机变得结构简单化、小型化、外观轻爽感。
当前,该型号的伺服压力机在丰田汽车公司得到的广泛的使用和推广。
其中该类型号伺服压力机生产线在广汽丰田首先得到使用。
SS4-16M-460-215型号的大型伺服压力机主要由以下部分组成:(一)伺服压力机机械结构概要1、上横梁驱动部分的结构由伺服驱动部分的结构(电机~减速机齿轮箱~上横梁)、滑块保持制动结构、齿轮锁紧装置结构、滑块部分调整的结构(4点独立调节系统)、滑块位置检测编码器部分的结构(直尺)、立柱部分的结构。
2、伺服模垫的机械结构概要伺服电机驱动部分的结构(伺服马达、制动器、滚珠丝杆)、模垫机械结构和均压化装置结构组成。
(二)伺服驱动控制系统1、伺服压力机控制系统是由压力机控制部分、滑块控制部分、气垫控制部分都是FANUC的FS16i-MB的控制系统。
由FS16i-MB CNC内的PMC程序进行控制。
2、伺服控制原理:电源-伺服控制器- PDM分配模块-伺服放大器-伺服马达(编码器)-齿轮箱(曲轴角度编码器)-不等速减速机-滑块工作(直线尺位置控制)-冲压作业完成。
二、典型故障及处理方法(一)伺服气垫滚珠丝杠损坏分析:伺服气垫工作原理是由4个伺服马达、同步皮带、皮带轮连接带动滚珠丝杠进行上升、下降(气垫压力300T 3.75s/行程)。
通过编码器进行位置控制行程,不同模具气垫压力、预备加速度和行程是不同的,最终将不同形状板件冲压成型。

伺服控制器与压力系统的联动控制技巧随着工业自动化的发展,伺服控制器与压力系统的联动控制技巧在工业生产中变得越来越重要。
这种联动控制技巧能够使压力系统与伺服控制器相互协调,实现更高效、精确的控制,提高生产效率。
本文将介绍伺服控制器与压力系统的联动控制技巧,包括联动控制原理、调试方法以及应用案例等方面的内容。
一、联动控制原理伺服控制器与压力系统的联动控制原理是通过将伺服控制器与压力传感器相连,通过测量和比较压力信号来实现控制。
当压力传感器检测到压力偏离设定值时,伺服控制器会根据设定的控制策略进行调整,通过改变伺服电机的输出信号来调整液压系统的压力。
在联动控制中,需要使用适当的控制算法来实现压力系统的控制。
常用的控制算法有PID控制、模糊控制和自适应控制等。
根据实际情况选择合适的控制算法,并对算法进行调优,可以实现更加精确的控制效果。
二、调试方法1. 设置压力设定值:根据实际需求,将压力设定值设置在适当的范围内。
可以根据工艺要求、设备规格和安全性能等因素来确定压力设定值。
2. 设置伺服控制器参数:根据压力系统的特点和工作要求,设置伺服控制器的参数。
包括比例增益、积分时间和微分时间等参数。
这些参数的设置将影响控制的稳定性和响应速度。
3. 联动控制调试:将伺服控制器与压力传感器进行连接,并根据控制策略进行调整。
观察压力系统的响应,并根据实际情况进行适当的调整。
通过不断的调试,使伺服控制器与压力系统达到最佳的联动效果。
三、应用案例1. 机床切削过程中的联动控制:在机床切削过程中,刀具与工件之间的压力是关键因素。
通过联动控制技巧,可以保持切削过程中的稳定压力,从而提高加工质量和效率。
2. 自动化生产线的液压系统控制:在自动化生产线中,液压系统起到重要作用。
通过联动控制技巧,可以实现对液压系统的精确控制,保证生产过程的稳定性和一致性。
3. 工程机械的液压系统控制:对于工程机械而言,液压系统的压力控制是非常重要的。
伺服控制方案伺服控制是一种通过控制系统对伺服电机进行精确控制的技术。
它广泛应用于工业机械、机器人、自动化设备等领域。
伺服控制方案的设计和实施对于提高设备的运动控制精度和稳定性至关重要。
本文将介绍伺服控制方案的基本原理以及常见的设计方法。
一、伺服控制方案的基本原理伺服控制是通过反馈控制的方式实现的。
控制系统首先需要获取被控对象的准确位置或速度信息,以便对其进行实时调整。
这一信息通常通过编码器或传感器来获取。
控制系统将反馈的位置或速度信号与设定值进行比较,然后根据比较结果来控制伺服电机的输出,以使被控对象达到设定值并保持稳定。
二、伺服控制方案的设计方法1. 确定系统需求:在设计伺服控制方案之前,需要明确系统的运动需求,包括位置精度、速度要求等。
这些需求将直接影响到伺服电机的选型和控制参数的设置。
2. 选型与参数设置:根据系统需求选择合适的伺服电机,并根据实际情况设置伺服控制器的参数,如增益、速度限制等。
参数的设置需要结合实际测试和调整,以保证系统的稳定性和控制精度。
3. 编码器或传感器的选择:选择合适的编码器或传感器来获取被控对象的准确位置或速度信息。
常见的编码器类型包括光电编码器、磁编码器等。
传感器的选择需要考虑到被控对象的特点和工作环境。
4. 控制算法的选择:根据实际情况选择合适的控制算法,如PID控制、模糊控制等。
控制算法的选择应综合考虑系统的动态响应、稳定性以及抗干扰能力。
5. 系统建模与仿真:使用系统建模软件对伺服控制系统进行建模和仿真,以评估控制方案的性能。
通过仿真可以提前检测和调整可能存在的问题,减少实际实施中的风险。
6. 系统实施与调试:在实施伺服控制方案之前,需要根据设计结果进行系统布线和接线,然后进行系统调试和优化。
调试过程中需要根据实际情况进行参数调整,以保证系统的准确性和稳定性。
三、伺服控制方案的应用领域伺服控制方案广泛应用于工业机械、机器人、自动化设备等领域。
具体应用包括:1. 机床控制:伺服控制方案可以用于实现机床的精密定位和运动控制,提高加工精度和生产效率。
伺服控制方案伺服控制是一种应用广泛的机器人控制技术,它可以根据指令控制电机的运动来实现自动化操作。
伺服控制的技术研究与应用,涉及到机电一体化、信息技术、自动控制、人工智能等多个领域。
在工业自动化、机器人制造、航空航天、医疗设备等领域中,都有广泛应用。
伺服控制的基本原理:首先,需要使用传感器检测电机的实际运动状态,并将实时监测结果反馈给控制器。
接下来,控制器通过处理反馈信号和设定的运动指令,计算出电机需要调整的转速和位置等参数。
最后,控制器将电机调整到指定位置或速度,从而实现对电机运动的准确控制。
伺服控制方案的设计:伺服控制系统的设计方案涉及到许多因素,例如电机类型、传感器类型、控制器类型、电源类型等。
在设计方案之前,需要对这些因素进行充分的了解和考虑,以确保设计出一个合适的伺服控制方案。
电机类型:根据电机类型不同,伺服控制方案的设计也有所不同。
目前市场上主要有直流电机、交流电机、步进电机等几种类型。
选用何种类型的电机,需要考虑其使用场合、使用环境、性能要求等因素。
例如,步进电机通常用于要求精度较高的场合,直流电机用于要求速度和转矩较大的场合,交流电机适用于需要频繁变速控制的场合。
传感器类型:传感器的类型也对伺服控制方案的设计产生重要影响。
主要用于检测运动状态的传感器类型,包括光电传感器、霍尔传感器、编码器等。
在进行传感器选择时,需要对使用环境、操作要求等进行充分考虑。
例如,在要求高速高精度的场合,通常会使用光电传感器或编码器来实现对运动状态的精确监测。
控制器类型:在伺服控制系统中,控制器是连接电机和传感器的重要桥梁。
目前市场上主要有单片机、PLC、DSP等几种控制器类型。
在进行控制器选择时,需要考虑系统的应用场合、要求的控制精度、处理速度和接口类型等多个因素。
通常在要求高精度时,会采用DSP控制器来实现更高的控制精度和运行速度。
电源类型:电源类型对伺服控制系统的正常运行也产生很大的影响。
在进行电源选择时,需要根据电机类型和控制器类型的不同,选用合适的电源类型和参数。
伺服控制方案伺服控制是指在工业自动化中,利用伺服电机及其控制系统来实现对于执行器的精确控制。
这种控制方式具有高精度、高稳定性和高可靠性的特点,因此被广泛应用于各种工业领域,如机械加工、机器人技术、自动化生产线等。
一、伺服控制原理与基本组成1. 伺服控制原理伺服控制的基本原理是通过反馈信号与设定值进行比较,产生控制信号来跟踪和调节输出。
通常使用位置、速度或扭矩作为反馈信号,通过比较与设定值的差异,控制伺服电机的输出。
2. 伺服控制系统的基本组成伺服控制系统包括伺服电机、传感器、驱动器和控制器等四个基本组成部分。
伺服电机是执行器,负责转化电能为机械能;传感器用于测量执行器的状态,并将其转化为电信号;驱动器接收控制信号,将其转化为电信号,控制伺服电机的运动;控制器是整个系统的大脑,负责处理输入信号并产生输出信号。
二、伺服控制方案的选择和设计1. 选择合适的伺服电机在伺服控制方案设计之前,需要根据实际应用需求选择合适的伺服电机。
不同的应用场景需要不同类型的伺服电机,如步进电机、直流伺服电机、交流伺服电机等。
选择合适的电机类型是确保伺服控制系统正常工作的基础。
2. 设计传感器和反馈系统传感器的选用与设计对于伺服控制的精度和稳定性至关重要。
常见的传感器包括位置编码器、速度传感器和力矩传感器等。
传感器将执行器的状态数据转化为电信号,通过反馈系统实现对输出的精确控制。
3. 驱动器的选择和匹配驱动器是将控制信号转化为电信号,驱动伺服电机实现运动的关键组成部分。
在选择驱动器时,需要考虑电机的功率、电流和电压等参数,并匹配合适的驱动器。
4. 控制器的设计和调试控制器是伺服控制系统的核心部分,它接收传感器的输入信号,并根据预设的算法产生控制信号。
控制器的设计和调试需要考虑控制算法、采样周期、控制精度等因素。
三、伺服控制系统的应用和发展趋势1. 应用领域广泛伺服控制系统广泛应用于各种工业领域,如自动化生产线、机械加工、机器人技术、电子设备制造等。