人与机器-Staubli
- 格式:pdf
- 大小:3.92 MB
- 文档页数:16
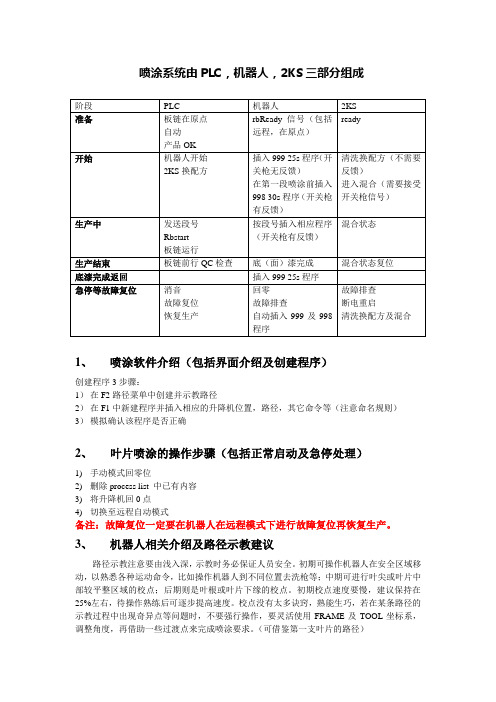
喷涂系统由PLC,机器人,2KS三部分组成1、喷涂软件介绍(包括界面介绍及创建程序)创建程序3步骤:1)在F2路径菜单中创建并示教路径2)在F1中新建程序并插入相应的升降机位置,路径,其它命令等(注意命名规则)3)模拟确认该程序是否正确2、叶片喷涂的操作步骤(包括正常启动及急停处理)1)手动模式回零位2)删除process list 中已有内容3)将升降机回0点4)切换至远程自动模式备注:故障复位一定要在机器人在远程模式下进行故障复位再恢复生产。
3、机器人相关介绍及路径示教建议路径示教注意要由浅入深,示教时务必保证人员安全。
初期可操作机器人在安全区域移动,以熟悉各种运动命令,比如操作机器人到不同位置去洗枪等;中期可进行叶尖或叶片中部较平整区域的校点;后期则是叶根或叶片下缘的校点。
初期校点速度要慢,建议保持在25%左右,待操作熟练后可逐步提高速度。
校点没有太多诀窍,熟能生巧,若在某条路径的示教过程中出现奇异点等问题时,不要强行操作,要灵活使用FRAME及TOOL坐标系,调整角度,再借助一些过渡点来完成喷涂要求。
(可借鉴第一支叶片的路径)4、注意事项1)升降机的操作需要通过示教盒来完成,机器人给出马达位置,然后PLC控制马达运动。
若该位置与上一位置相同,则机器人不给运动命令,所以当按某一马达位置升降机无动作时,首先确认升降机及PLC是否就位,如果一切OK,则按另一马达位置,稍等片刻即会运动。
2)若喷枪在应该打开时未打开,可通过示教盒上的GUN 的ON 来强制处理。
3)若出现工作模式不稳的提示,可能是由于在切换模式时速度过快引起的,它并不影响系统的运行,按OK键后该提示自动消失。


喷涂系统由PLC,机器人,2KS三部分组成1、喷涂软件介绍(包括界面介绍及创建程序)创建程序3步骤:1)在F2路径菜单中创建并示教路径2)在F1中新建程序并插入相应的升降机位置,路径,其它命令等(注意命名规则)3)模拟确认该程序是否正确2、叶片喷涂的操作步骤(包括正常启动及急停处理)1)手动模式回零位2)删除process list 中已有内容3)将升降机回0点4)切换至远程自动模式备注:故障复位一定要在机器人在远程模式下进行故障复位再恢复生产。
3、机器人相关介绍及路径示教建议路径示教注意要由浅入深,示教时务必保证人员安全。
初期可操作机器人在安全区域移动,以熟悉各种运动命令,比如操作机器人到不同位置去洗枪等;中期可进行叶尖或叶片中部较平整区域的校点;后期则是叶根或叶片下缘的校点。
初期校点速度要慢,建议保持在25%左右,待操作熟练后可逐步提高速度。
校点没有太多诀窍,熟能生巧,若在某条路径的示教过程中出现奇异点等问题时,不要强行操作,要灵活使用FRAME及TOOL坐标系,调整角度,再借助一些过渡点来完成喷涂要求。
(可借鉴第一支叶片的路径)4、注意事项1)升降机的操作需要通过示教盒来完成,机器人给出马达位置,然后PLC控制马达运动。
若该位置与上一位置相同,则机器人不给运动命令,所以当按某一马达位置升降机无动作时,首先确认升降机及PLC是否就位,如果一切OK,则按另一马达位置,稍等片刻即会运动。
2)若喷枪在应该打开时未打开,可通过示教盒上的GUN 的ON 来强制处理。
3)若出现工作模式不稳的提示,可能是由于在切换模式时速度过快引起的,它并不影响系统的运行,按OK键后该提示自动消失。

机器人品牌集合1.ABB (瑞典,瑞士)在工业焊接,搬运,涂胶,喷涂是非常广泛. 2.Adept (美国)在视觉机器人里是比较好的,用于物料分拣比较酷. 3.Fanuc 法那科(日本)在数控应用比较广泛4.OTC (日本)弧焊控制器还不错5.Kuka 库卡(德国)工业焊接,搬运,涂胶,喷涂是顶级的6.MOTORMAN,YASKAWA 安川(日本)工业焊接,搬运不错. 7.Nachi 不二越(日本) 在汽车厂机器人电阻电领域用得比较多,有专用的点焊程序,不二越那智机器人点焊速度快8.Panasonic松下(日本)在中国走的是低端路线,主要是靠焊机持平机器人。
9.Yamaha (日本)单轴以及到4轴机器手.电子组装10.DENSO 电装(日本)丰田旗下双轴到六轴机器手11.MITSUBISHI三菱有做六轴机器手12.IAI (日本)单轴以及到4轴机器手13.柯马(意大利)菲亚特旗下14.新松(沈阳自动化所)国产开始研发6轴,五轴进入市场不成熟. 15.DASA 多伺(韩国)单轴到多轴16.GRYPHONE (英国)做演示教学17.Hyundai 现代(韩国)比较少18.Honda 本田(日本) 开发人形机器人. 19.Kawasaki 川崎重工(日本)在中国市场的普及率较低,几百台的样子吧,日姿企业之外很少会用到川崎机器人20.flexlink(瑞典)21.STAUBLI 史陶比尔法国在喷涂和电子行业用得较多.六轴机器人重复精确度0.002mm.22.Schmoll (德国)不详细23.Rob (德国) 资料比较少24.CRS (加拿大)用于自动化控制系统25.ROBOSTAR,韩国品牌,走低端路线,价格便宜,用松下伺服马达。
自己开发控制器。
机器人品牌分析2007-12-26 08:41 机器人品牌市场调查分析一. 德国(杜尔)涂装机器人,是杜尔公司德国有名的涂装设备厂专门为身涂装线量身制做的。
因杜尔主要从事涂装设备制造,此机器人只应用在杜尔自己安装的涂装线上,目前不涉及其他领域。

全球十大工业机器人品牌!e-works导读工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
跟随e-works视角来看全球工业机器人十大品牌:作者:e-works综合整理FANUC(发那科)是日本一家专门研究数控系统的公司,成立于1956年。
是世界上最大的专业数控系统生产厂家,占据了全球70%的市场份额。
FANUC1959年首先推出了电液步进电机,在后来的若干年中逐步发展并完善了以硬件为主的开环数控系统。
进入70年代,微电子技术、功率电子技术,尤其是计算技术得到了飞速发展,FANUC公司毅然舍弃了使其发家的电液步进电机数控产品,一方面从GETTES公司引进直流伺服电机制造技术。
1976年FANUC公司研制成功数控系统5,随后又与SIEMENS公司联合研制了具有先进水平的数控系统7,从这时起,FANUC公司逐步发展成为世界上最大的专业数控系统生产厂家。
自1974年,FANUC首台机器人问世以来,FANUC致力于机器人技术上的领先与创新,是世界上唯一一家由机器人来做机器人的公司,是世界上唯一提供集成视觉系统的机器人企业,是世界上唯一一家既提供智能机器人又提供智能机器的公司。
FANUC机器人产品系列多达240种,负重从0.5公斤到1.35吨,广泛应用在装配、搬运、焊接、铸造、喷涂、码垛等不同生产环节,满足客户的不同需求。
2008年6月,FANUC成为世界第一个突破20万台机器人的厂家;2011年,FANUC全球机器人装机量已超25万台,市场份额稳居第一。
二、库卡(KUKA Roboter Gmbh)-德国库卡(KUKA)及其德国母公司是世界工业机器人和自动控制系统领域的顶尖制造商,它于1898年在德国奥格斯堡成立,当时称“克勒与克纳皮赫奥格斯堡(KellerundKnappichAugsburg)”。
公司的名字KUKA,就是KellerundKnappichAugsburg的四个首字母组合。
Staubli激光切割机器人工具标定张华君;夏超;叶永龙;丁学亮【摘要】机器人末端执行器的移动和旋转是基于工具中心点.精确的工具参数可以提高离线编程能力,使工具容易的改变位置与姿态,快速的对齐到加工平面.文中提出了一种快捷、有效的工具参数的标定方法.只需要示教特殊姿态,通过数学计算就可以获取包含x,y,z,Tx,Ty,Tz参数的工具齐次变换矩阵,描述了法兰坐标系到工具坐标系的偏移和旋转.该方法不需要外部测量工具,精简了操作步骤,实验证明是切实有效的标定方法.%The movement and rotation of robot end-effector is based on the center point of tool. Accurate tool parameters can improve the capability of off-line programming and make the tool easier to change position and orientation, and align to the processing plane quickly. This paper put forward a fast and effective calibration method for the tool coordinate frame. Only need to teach four points, it got a homogeneous transformation matrix which includes an x,y,z,rx,ry,rz parameter through the mathematical calculation, and described the translation and rotation from flange coordinate frame to tool coordinate frame. This method does not need external measuring tool, and can simplify operating procedures, The experiment has proved to be a feasible and practical calibration method.【期刊名称】《轻工机械》【年(卷),期】2013(031)002【总页数】5页(P7-11)【关键词】机器人运动学;工具坐标系;工具标定;变换矩阵【作者】张华君;夏超;叶永龙;丁学亮【作者单位】浙江理工大学,机械与自动控制学院,浙江杭州 310018【正文语种】中文【中图分类】TP242机器人通过在末端安装不同的执行工具,可以高速、精准且快速地完成各种任务,现在越来越多地应用在各种高精密度加工行业,例如弧焊、磨削、激光切割。
三级阶梯画同心圆
我做的是用机器人在三级阶梯上画同心圆,每级阶梯上从左至右画三个。
如下图:
首先编写一个画圆的程序,供后面程序调用,在画圆程序中,我们用偏置的命令,简化试教点,从原来需要试教五个点简化到只需要试教圆的中心点,程序如下:
然后编写循环程序,在设计循环程序时,使用for语句。
在不同的阶梯上画圆的时候需要x,y,z三个轴的坐标都需要变,为了简化程序,将z方向的变化引用x方向的变化,因此简化到只需要两个for语句嵌套,程序语句如下:
程序设计时需要注意的有:
1、在编写circle()画圆程序时,要将该程序编写在start()的外面,而
循环语句需要编写在其里面;
2、编写程序时要清楚哪个是局部数据哪个是参数;
3、定义参数的时候的顺序会影响后面程序调用时的引用参数顺序。