机器人的数学基础齐次变换矩阵及其运算.
- 格式:ppt
- 大小:4.11 MB
- 文档页数:35
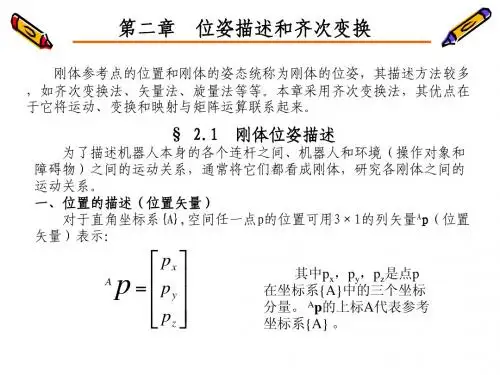
齐次坐标变换矩阵公式齐次坐标变换矩阵公式,这可是个相当有趣的数学概念呢!咱先来说说啥是齐次坐标。
想象一下,在平面上有个点 (x, y) ,为了让它能更好地进行各种变换,比如平移、旋转、缩放啥的,咱就给它加个额外的维度,变成 (x, y, 1) ,这就是齐次坐标啦。
那齐次坐标变换矩阵公式到底是啥呢?简单来说,就是一个能让这些齐次坐标按照咱想要的方式进行变化的神奇矩阵。
比如说,咱要把一个点沿着 x 轴平移 a 个单位,沿着 y 轴平移 b 个单位,那对应的变换矩阵就是 [1 0 a; 0 1 b; 0 0 1] 。
再比如说,要是想把这个点绕着原点逆时针旋转θ 角度,那变换矩阵就是[cosθ -sinθ 0; sinθ cosθ 0; 0 0 1] 。
有一次,我给学生们讲这个知识点的时候,发生了一件特别好玩的事儿。
当时,我在黑板上写下了一个复杂的齐次坐标变换矩阵,然后问他们:“同学们,你们觉得这个矩阵能把一个点变成啥样?”结果有个调皮的小家伙举手说:“老师,我感觉这矩阵像个魔法阵,能把点变没了!”全班哄堂大笑。
我笑着说:“这可不会把点变没,它是有规律的魔法呢!”然后我就一步一步地给他们解释这个矩阵的作用。
那为啥要学齐次坐标变换矩阵公式呢?这用处可大了去啦!在计算机图形学里,要让图像动起来、变漂亮,就得靠它。
还有机器人的运动控制,也离不开这个公式。
比如说,设计一个能跳舞的机器人,就得通过齐次坐标变换矩阵公式来计算它每个关节的位置变化,才能让它跳出炫酷的舞步。
在实际应用中,齐次坐标变换矩阵公式就像是一把万能钥匙,能打开很多难题的锁。
对于咱们学习数学和相关领域的同学来说,掌握这个公式就像是掌握了一门超级厉害的武功秘籍。
虽然一开始可能觉得有点难,但只要多练习、多琢磨,就能发现其中的乐趣和奥秘。
总之,齐次坐标变换矩阵公式虽然看起来有点复杂,但只要咱们用心去学,就能发现它的魅力所在,为我们解决很多实际问题提供强大的工具。
相机坐标系到机械臂末端坐标系的齐次变换矩阵是机器视觉和工业机器人领域中一个非常重要的概念。
对于工业领域的自动化生产,机械臂和相机之间的精确配准是至关重要的,而齐次变换矩阵正是用来描述相机坐标系到机械臂末端坐标系之间的关系的。
本篇文章将深入探讨相机坐标系到机械臂末端坐标系的齐次变换矩阵的计算方法,并且将详细介绍该计算方法的原理和实际应用。
一、齐次变换矩阵的概念和基本原理齐次变换矩阵是一种用来描述坐标系之间关系的数学工具,它可以将一个坐标系中的点映射到另一个坐标系中去。
在工业机器人和机器视觉系统中,我们常常需要将相机坐标系中的点映射到机械臂末端坐标系中,这就需要使用到齐次变换矩阵。
齐次变换矩阵的基本形式如下所示:\[ T = \begin{bmatrix} R & t \\ 0 & 1 \end{bmatrix} \]其中,\[R\]为旋转矩阵,\[t\]为平移向量。
齐次变换矩阵可以将一个点的坐标\[P\]从相机坐标系变换到机械臂末端坐标系:\[ P' = T \times P \]二、计算相机坐标系到机械臂末端坐标系的齐次变换矩阵计算相机坐标系到机械臂末端坐标系的齐次变换矩阵需要以下步骤:1. 确定相机坐标系和机械臂末端坐标系的原点需要确定相机坐标系和机械臂末端坐标系的原点位置。
这两个坐标系的原点通常是相机的光学中心和机械臂末端执行器的中心点。
确定了原点位置之后,我们可以将相机坐标系和机械臂末端坐标系的坐标系原点重合。
2. 计算旋转矩阵接下来,需要计算相机坐标系到机械臂末端坐标系的旋转矩阵。
旋转矩阵描述了两个坐标系之间的旋转关系。
在实际应用中,可以通过标定相机和机械臂的姿态来获取旋转矩阵。
3. 计算平移向量除了旋转矩阵之外,还需要计算相机坐标系到机械臂末端坐标系的平移向量。
平移向量描述了两个坐标系之间的平移关系。
平移向量可以通过相机和机械臂的空间位置信息来计算得到。
4. 组合旋转矩阵和平移向量将计算得到的旋转矩阵和平移向量组合在一起,就得到了相机坐标系到机械臂末端坐标系的齐次变换矩阵。

利用齐次矩阵表示旋转加平移变换把上述两种变换结合起来用齐次矩阵表示,这时的齐次变换矩阵就是⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==10000cos sin 00sin cos 000011000100010001),(),,(θθθθθc b a X Rot c b a Trans H ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000cos sin 0sin cos 0001c b a θθθθ可见,在齐次变换矩阵中旋转矩阵和表示平移的列阵 确实是分离的。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-1000cos sin 0sin cos z z z z θθθθ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡1c b a 注意,一般情况下)90,()90,()90,()90,(0000X Rot Y Rot Y Rot X Rot ≠利用齐次矩阵表示手的转动和移动手的转动可以表示为绕X 轴的侧摆 , 绕Y 轴的俯仰和绕 Z 轴横滚 , 依次构成的复合转动 ,采用简化符号 , 则有),(x X Rot Φ),(y Y Rot Φ),(z Z Rot Φ),,(x y z RPY ΦΦΦsin cos,==s c ),(),(),(),,(x y z X Y Z X Rot Y Rot Z Rot RPY ΦΦΦ=ΦΦΦ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦΦ-Φ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦ-ΦΦ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦΦ-Φ=100000000001100000001000100001000000xx x x y y y y z z z z c s s c c s s c c s s c⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ΦΦΦΦΦ-ΦΦ-ΦΦΦΦΦ+ΦΦΦΦΦΦΦ+ΦΦΦΦΦ-ΦΦΦΦΦ=1000000xz xy y x z x y z x z x y z y z x z x y z x z x y z y z c c s c s s c c s s c c s s s c s s s c s c c s s s c c c ),(),(),(),,(x y z X Y Z X Rot Y Rot Z Rot RPY ΦΦΦ=ΦΦΦ上式表示了手的转动运动。

举例说明运用齐次变换矩阵求解机器人正运动学的方法机器人正运动学是指根据机器人关节角度,求出机器人末端执行器的位置和姿态。
运用齐次变换矩阵的方法可以方便地求解机器人正运动学。
齐次变换矩阵是一种描述机器人移动和旋转的数学工具,它能够将机器人的位置和姿态用一个矩阵表示出来。
在机器人正运动学中,我们需要根据机器人各个关节的角度来求出机器人的位置和姿态。
假设机器人有n个关节,每个关节的旋转角度分别为θ1,θ2,...,θn。
我们可以用齐次变换矩阵来表示机器人每个关节的旋转和移动。
假设第i个关节的齐次变换矩阵为Ti,则Ti = [cosθi -sinθi 0 ai;sinθi cosθi 0 bi;0 0 1 ci;0 0 0 1];其中ai, bi, ci分别表示第i个关节的位置坐标,θi表示第i个关节的旋转角度。
机器人的末端执行器的位置和姿态可以通过将所有关节的齐次变换矩阵相乘得到。
即T0n = T1 * T2 * ... * Tn;其中T0n表示机器人的末端执行器的齐次变换矩阵。
通过分析T0n的各个元素,我们可以得到机器人末端执行器的位置和姿态信息。
举例说明,假设有一个二自由度机器人,其第一个关节的旋转角度为θ1,第二个关节的旋转角度为θ2。
假设机器人的关节长度均为1,且第二个关节相对于第一个关节的位置偏移为1。
则第一个关节的齐次变换矩阵为T1 = [cosθ1 -sinθ1 0 0;sinθ1 cosθ1 0 0;0 0 1 0;0 0 0 1];第二个关节相对于第一个关节的位置偏移为1,因此第二个关节的位置坐标为(1,0,0)。
其齐次变换矩阵为T2 = [cosθ2 -sinθ2 0 1;sinθ2 cosθ2 0 0;0 0 1 0;0 0 0 1];将两个齐次变换矩阵相乘得到机器人的末端执行器的齐次变换矩阵为T0n = T1 * T2= [cosθ1cosθ2-sinθ1sinθ2 -cosθ1sinθ2-sinθ1cosθ2 0 cosθ1;sinθ1cosθ2+cosθ1sinθ2 -sinθ1sinθ2+cosθ1cosθ2 0 sinθ1;0 0 1 0;0 0 01];通过分析T0n的各个元素,我们可以得到机器人末端执行器的位置和姿态信息。