机械基础定轴轮系末端带移动件的传动计算汇总
- 格式:doc
- 大小:159.50 KB
- 文档页数:7
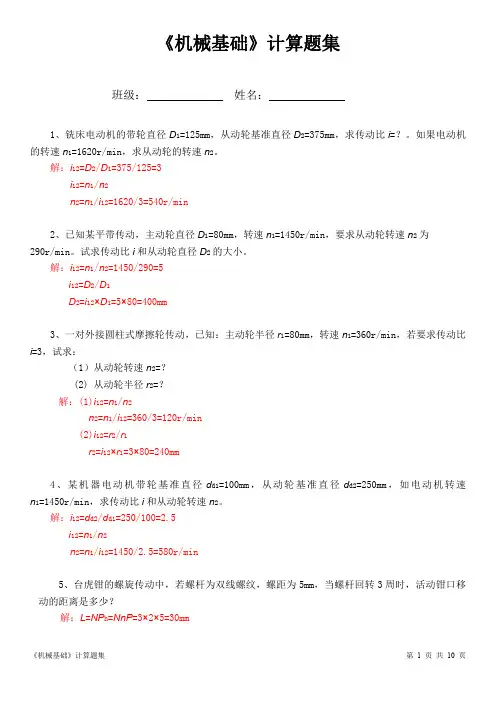
《机械基础》计算题集班级:姓名:1、铣床电动机的带轮直径D1=125mm,从动轮基准直径D2=375mm,求传动比i=?。
如果电动机的转速n1=1620r/min,求从动轮的转速n2。
解:i12=D2/D1=375/125=3i12=n1/n2n2=n1/i12=1620/3=540r/min2、已知某平带传动,主动轮直径D1=80mm,转速n1=1450r/min,要求从动轮转速n2为290r/min。
试求传动比i和从动轮直径D2的大小。
解:i12=n1/n2=1450/290=5i12=D2/D1D2=i12×D1=5×80=400mm3、一对外接圆柱式摩擦轮传动,已知:主动轮半径r1=80mm,转速n1=360r/min,若要求传动比i=3,试求:(1)从动轮转速n2=?(2)从动轮半径r2=?解:(1)i12=n1/n2n2=n1/i12=360/3=120r/min(2)i12=r2/r1r2=i12×r1=3×80=240mm4、某机器电动机带轮基准直径d d1=100mm,从动轮基准直径d d2=250mm,如电动机转速n1=1450r/min,求传动比i和从动轮转速n2。
解:i12=d d2/d d1=250/100=2.5i12=n1/n2n2=n1/i12=1450/2.5=580r/min5、台虎钳的螺旋传动中,若螺杆为双线螺纹,螺距为5mm,当螺杆回转3周时,活动钳口移动的距离是多少?解:L=NP h=NnP=3×2×5=30mm6、某螺杆、螺母组成的螺旋传动,螺距P=5mm,当螺杆原地转动3周时,母移动距离为60mm,求螺纹线数?解:L=NP h=NnPn=L/NP=60/3×5=47、一普通螺旋机构,以双线螺杆驱动螺母作直线运动。
已知:螺距P=3mm,转速n=46r/min。
试求螺母在1.5分钟内移动的距离L。
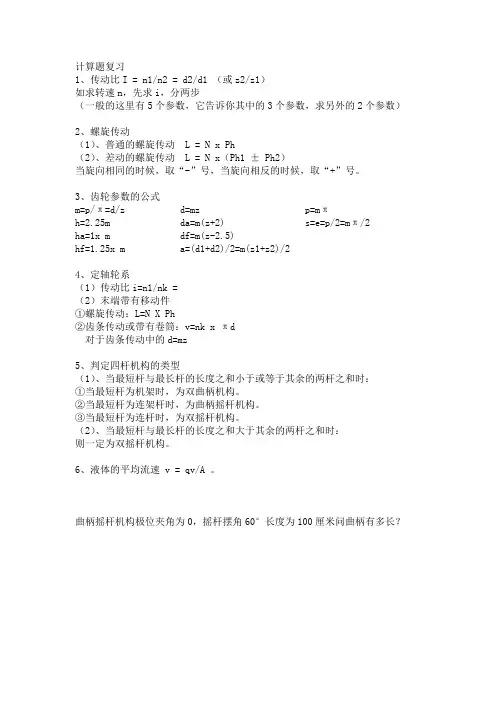
计算题复习
1、传动比I = n1/n2 = d2/d1 (或z2/z1)
如求转速n,先求i,分两步
(一般的这里有5个参数,它告诉你其中的3个参数,求另外的2个参数)
2、螺旋传动
(1)、普通的螺旋传动 L = N x Ph
(2)、差动的螺旋传动 L = N x(Ph1 ± Ph2)
当旋向相同的时候,取“-”号,当旋向相反的时候,取“+”号。
3、齿轮参数的公式
m=p/π=d/z d=mz p=mπ
h=2.25m da=m(z+2) s=e=p/2=mπ/2
ha=1x m df=m(z-2.5)
hf=1.25x m a=(d1+d2)/2=m(z1+z2)/2
4、定轴轮系
(1)传动比i=n1/nk =
(2)末端带有移动件
①螺旋传动:L=N X Ph
②齿条传动或带有卷筒:v=nk x πd
对于齿条传动中的d=mz
5、判定四杆机构的类型
(1)、当最短杆与最长杆的长度之和小于或等于其余的两杆之和时:
①当最短杆为机架时,为双曲柄机构。
②当最短杆为连架杆时,为曲柄摇杆机构。
③当最短杆为连杆时,为双摇杆机构。
(2)、当最短杆与最长杆的长度之和大于其余的两杆之和时:
则一定为双摇杆机构。
6、液体的平均流速 v = qv/A 。
曲柄摇杆机构极位夹角为0,摇杆摆角60°长度为100厘米问曲柄有多长?
设其余三杆为a\b\d;
则100+b =100-b+d,故d=2b。
右边为等边三角形
那正如刚才计算的b=d/2,答案应该为50,。
定轴轮系课程名称机械基础授课班级高二综合预科班授课地点教室(多媒体设备)课时6课时学习单元定轴轮系课题定轴轮系教学内容1.定轴轮系的传动比的计算方法及各轮回转方向的判定;2.定轴轮系末端带移动件的传动计算;3.定轴轮系中齿轮受力分析。
教学目标【知识目标】1.掌握定轴轮系传动比的计算方法及各轮回转方向的判定;2.掌握定轴轮系末端带移动件的传动计算;3.掌握定轴轮系中齿轮受力分析。
【能力目标】1.知识的获取、消化和吸收;2.分析判断、解决问题的能力;3.利用分解组合法应用知识的能力。
【情感目标】1.语言表达能力;2.团队意识。
教学重点1.定轴轮系的识读、传动路线的分析。
2.定轴轮系传动比的计算、各轮回转方向的判定、末端带移动件的传动计算和齿轮受力分析。
教学难点定轴轮系各部分知识的综合运用。
行为能力分析【专业能力】熟练绘制定轴轮系,领会定轴轮系的识读,掌握定轴轮系传动比的计算、各轮回转方向的判定、末端带移动件的传动计算和齿轮受力分析。
【方法能力】知识的获取和消化吸收,分析判断、解决问题,分解组合应用,自学能力;【社会能力】语言表达、团队意识、展示技术。
教学方法任务式教学法、模块化教学法、多媒体演示法、分解组合教学法、分组测试激励法教具多媒体课件、实物投影仪教学设计过程教学环节教学内容教师活动学生活动【任务发布与分解】【定轴轮系部分任务单】(该类题目为高考必考题)现有一定轴轮系,已知各齿轮齿数Z1=20,Z2=40,Z3=15,Z4=60,Z5=18,Z6=18,Z7=1,Z8=40,Z9=20,齿轮9的模数m=3mm,齿轮1的转向如箭头所示,n1=100r/min,请完成一下任务:【任务一】用箭头法判别齿条10的移动方向?【任务二】计算出传动比i18?【任务三】确定蜗轮8的转速n8为多少?(r/min)【任务四】计算齿条10移动的速度v6为多少?(m/s)(注:了解其他几种末端形式,并分别掌握其移动速度计算。
机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。

定轴轮系传动比的计算在机械传动系统中,传动比指的是输入轴和输出轴之间的转速或转矩比值。
定轴轮系是常见的传动形式之一,其传动比可在设计中给定或计算得到。
本文将介绍定轴轮系传动比的计算方法,并结合实例进行说明。
定轴轮系传动比计算是基于轮系的齿轮参数进行的。
对于一个定轴轮系,通常包含两个或多个齿轮,其中一个齿轮固定在输入轴上,称为主动齿轮;其他齿轮则固定在输出轴或其他齿轮上,称为从动齿轮。
传动比的计算主要依赖于齿轮的齿数和模数等参数。
传动比的计算公式如下:传动比=(主动齿轮齿数/从动齿轮齿数)*(从动齿轮模数/主动齿轮模数)首先,需要明确所需要计算的是速比还是力比。
速比是输出轴速度与输入轴速度之比,力比是输出轴扭矩与输入轴扭矩之比。
这两种比值在实际应用中有不同的需求和意义。
以速比为例,假设一个齿轮传动系统,主动齿轮齿数为N1,模数为M1;从动齿轮齿数为N2,模数为M2、传动比就可以根据上述公式计算得到。
举例来说,假设主动齿轮有20齿(N1=20),模数为2(M1=2),从动齿轮有60齿(N2=60),模数为5(M2=5)。
将这些参数代入传动比公式,计算得到传动比为:传动比=(20/60)*(5/2)=0.4167这意味着输入轴每转一圈,输出轴将转0.4167圈。
也就是说,输出轴的转速是输入轴转速的0.4167倍。
类似地,如果需要计算力比,则可以根据上述公式进行类似的计算。
但需要注意的是,力比与速比不同,它不仅取决于齿数,还与轴的半径和材料等因素有关。
在实际设计中,为了满足特定的工作要求,传动比往往需要进行合理的选择和优化。
可以通过修改主动齿轮和从动齿轮的参数,如齿数、模数等,来实现不同的传动比。
同时,还需要考虑齿轮的尺寸、轴距、强度等因素,以保证传动系统的可靠性和效率。
总而言之,定轴轮系传动比的计算依赖于齿轮的齿数和模数等参数。
通过应用传动比公式,可以计算出期望的速比或力比。
在实际应用中,还需要综合考虑其他因素,以确定最优的传动方案。
老师出示小黑板给出每种齿轮副的端面图、侧面图要求学生在黑板上的端面图和侧面图上分别标出两轮转向,并写出其传动比公式。
二、新引入新课:教师接着展示定轴轮系模型,引导学生参与到演示教学中来,通过一对齿轮的传动比概念,教师提出问题:多个齿轮的传动比是否就是输入轴的转速与输出轴的转速之比?引发学生思考。
演示模型启发提问2分钟授新:一定轴轮系传动比公式推导和传动比定义的理解35分钟课讲授由以上两个齿轮传动的思路和以下例题的推导过程来推出定轴轮系传动比公式和定义分析步骤:1)分析该轮系的传动路线。
2)该轮系有几对齿轮组成?3)每一对啮合的齿轮中哪一个是主动轮?哪一个是从动轮?分别写出它们传动比公式。
4)在该轮系中分别有哪些齿轮是同轴的?注意:所有齿轮副传动比的连乘积就是该轮系的传动比。
514'3'21543354433221453423122)1(ωωωωωωωωωω=-==⋅⋅⋅⋅⋅⋅zzzzzzzziiii由以上定轴轮系的传动比公式得出其定义:定轴轮系传动比是指轮系中首末两轮的角速度(或转速)之比。
推广:设首轮A的转速为nA,末轮K的转速为nK,m为圆柱齿轮外啮合的对数,则平面定轴轮系的传动比可写为:◆其中:m为外啮合圆柱齿轮副的数目◆结果为正:两轮回转方向相同◆结果为负:两轮回转方向相反◆思考:齿轮4在图中位置有什么特殊地方?在公式中有什么特点?对轮系的传动比有何影响?齿轮4既是齿轮3´的从动轮又是齿轮5的主动轮;它的齿数或转数在公式中既作分子又作分母;只改变齿轮副中从动轮教师引导学生通过从模型到简图按着这几个步骤一步步分析来掌握对轮系的读图,通过推导得出定期轴轮系传动比公式。
要求学生理解、领会定轴轮系传动比公式。
122’3 3’45122112zzi-==ωω'233223zzi==ωω'344334zzi-==ωω455445zzi-==ωω回转方向而不影响齿轮副传动比的大小——惰轮(过桥轮)惰轮作用:1、实现换向1)2)◆总结:外啮合时加偶数惰轮时,齿轮副的主、从动轮的回转方向是相反的◆外啮合时加奇数惰轮时,齿轮副的主、从动轮的回转方向是相同的2、延长传动距离,所以又称过桥轮。
教学设计新【授知- 识6、2定轴轮系传动比的计算一定轴轮系传动比轮系中首末两轮的转速(或角速度)比,称为轮系的传动比,用i•表示。
即:﹙1﹚旋转方向的判断$(1)一对圆柱齿轮传动,外啮合时两轮转向相反其传动比规定为负一对内啮合圆柱齿轮,两转转向相同,其传动比规定为正(2)两轮的旋转方向也可以用画箭头的方法表示。
两轮旋转方向相反,画两反向箭头,两轮旋转方向相同,画两同向箭头。
箭头方向表示可见侧面的圆周速度的方向。
2、传动比的计算】定轴轮系的传动比等于组成该轮系的各对齿轮传动比的连乘积;首末两轮的转向由轮系中外啮合齿轮的对数决定。
上式(-1)3•表示轮系中外啮合齿轮共有三对,(-1)3=-1表示轮1与轮5转向相反。
从图6-5可知,•轮系中各轮的转向也可用画箭头的方法表示。
由分析可知,定轴轮系总传动比的计算式可写成i1k=n1/n k=(-1)m·所有从动轮齿数的连乘积/所有主动轮齿数的连乘积学生积极思考老师提出的问题,并做回答。
;认真听讲,并做就好课堂笔记。
(掌握定轴轮系传动比的计算公式并学会应用40min教学过程—教学教师讲授、指导(主导)内容学生学习、操作(主体)时间分配(a) 外啮合齿轮(b) 内啮合齿轮图6-3成对圆柱齿轮转向环节活动新—授!知/ 识式中m为外啮合齿轮的对数。
注意:在应用上式计算定轴轮系的传动比时,若轮系中有圆锥齿轮,蜗杆蜗轮机构,传动比的大小仍可用上式计算,而各轮的转向只能用画箭头的方法在图中表示清楚。
例1<例2如图所示的轮系中,Z1=16,Z2=32, Z2'=20, Z3=40, Z3'=2(右旋)•Z4=40。
若n1=800r/min, 其转向如图所示, 求蜗轮的转速n4及各轮的转向.解:传动比大小:i14=n1/n4=Z2Z3Z4/Z1Z2'Z3'=32×40×40/16×20×2=80所以: n4=n1/i14=800/80=10r/min》因为此轮系中有蜗杆蜗轮和圆锥齿轮,故各轮的转向只能用箭头表示。
定轴轮系传动比的计算这次课的内容是定轴轮系传动比的计算,我们将学习下面三个方面的内容:一、轮系的定义;二、轮系的分类;三、定轴轮系传动比的计算。
重点学习定轴轮系传动比的计算以及首末两轮转向的判断。
什么是轮系?由两个齿轮相啮合组成的齿轮机构是齿轮传动最简单的形式。
工作中为了实现变速、换向、获得大传动比、分路传动、运动分解与合成等功能,常将一系列相互啮合的齿轮组成传动系统。
这种传动系统称为齿轮系(简称轮系)。
这就是轮系。
轮系怎样分类呢?轮系分为定轴轮系、周转轮系和复合轮系三种。
何谓定轴轮系?定轴轮系是指,轮系中,各齿轮的几何轴线相对机架固定不动的轮系。
这就是定轴轮系。
这两个图是定轴轮系的简图定轴轮系又分为平行轴定轴轮系和非平行轴定轴轮系。
定轴轮系中,如果每个齿轮的几何轴线相互平行,则称之为平行轴定轴轮系,这是平行轴定轴轮系的动画与简图。
定轴轮系中,如果每个齿轮的几何轴线不是相互平行的关系,则称之为非平行轴定轴轮系。
这是非平行轴定轴轮系的简图。
何谓周转轮系?周转轮系是指,轮系中,至少有一个齿轮的几何轴线绕着其他齿轮的固定轴线回转的轮系。
这是周转轮系。
周转轮系按自由度的大小又可以分为差动轮系和行星轮系。
自由度为2的轮系就是差动轮系,这是差动轮系。
自由度为1的轮系是行星轮系,这是行星轮系。
何谓复合轮系?复合轮系是指,将定轴轮系和周转轮系组合而成的轮系。
这是复合轮系。
这个轮系中,左半部分是定轴轮系,右半部分是周转轮系。
三、定轴轮系传动比的计算首先来学习轮系传动比的定义,我们知道,一对齿轮的传动比i12=ω1/ω2=Z2/Z1 可以直接得出。
对于齿轮系,传动比等于输入轴的角速度(或转速)与输出轴的角速度(或转速)之比。
设输入轴的角速度为ω1,输出轴的角速度为ωk ,按定义有:i1k=ω1 /ωk 。
这里的下标1表示输入轴或首轮,K表示输出轴或末轮。
当i1k>1时为减速, i1k<1时为增速。
2、定轴轮系传动比的计算公式这是一个平行轴定轴轮系,里面有4对齿轮在啮合,分别是1和2,2’和3,3’和4,4’和5,因为一对齿轮的传动比大小为其齿数的反比。