2016年吉林大学大学生电子设计竞赛仪电学院初选赛中心校区赛区5
- 格式:pdf
- 大小:130.72 KB
- 文档页数:5
2016年全国大学生电子设计竞赛脉冲信号参数测量仪(E题)【本科组】参赛学校:山东工商学院参赛队员:陈阳李新太张慧丽参赛编号:028E212016年7月28日1 / 13摘要由于现在时代的快速发展,越来越多的科技品用在日常生活中,满足了我们的需求,方便了我们的生产。
所以本文论述了脉冲信号参数测量仪的设计思路和过程.本设计是基于单片机STM mini 32的信号发生器及各种芯片和各个程序来设计和实现。
信号发生器基于芯片LM 311,TLV3501及外围电路设计的通过控制定时器中的捕获和分频电路可以改变频率。
对于占空比,是通过两个定时器,一个测频率周期,另一个测输入捕获。
对于幅度测量,只需求出峰值电路即可。
对于上升时间的测量,通过高速比较器来获得,最后我们用芯片AD9850又制作了一个矩形脉冲信号发生器。
本实验在误差允许的范围内具有可行性。
关键字:STM mini 32、LM311、TLV3501 ,AD9850。
AbstractThis article discusses the measuring instrument of pulse signal parameters designed idea and process. This design is based on single chip microcomputer STM mini 32 signal generator and frequency and amplitude measurement instrument design and implementation. Signal generator bases on chips and peripheral circuit design by controlling the timer in the capture and frequency division circuit can change the frequency. For duty ratio, it is through the two timers, a frequency measurement period, input capture another test. Circuit for amplitude measurement, which only needs a peak. For measuring rise time, getting through the high-speed comparator.Keywords: STM mini 32、LM311、TLV3501 ,AD9850。

注意事项:1、参赛领队老师请于9月1号10点前将,将《2016年吉林省大学生电子设计竞赛参赛汇总表》电子版发送到leerui1979@2、4号早8点—9点提交作品,提交作品和之后的测试时请学生带身份证、学生证。
参赛队需上交的材料包括:①《设计报告》、②制作实物、③《2016年吉林省大学生电子设计竞赛登记表》,均封入各校自备的纸箱,纸箱封条由赛区组委会统一制备。
密封后的纸箱内部所有物品及纸箱外部不得出现任何校名、参赛队代号、参赛队员姓名及其它暗记,否则视为无效。
《2016年吉林省大学生电子设计竞赛登记表》每个参赛队填写两份、有巡视员签字:一份放在作品箱中,另一份各参赛队保留,交作品时交到收作品处。
参赛队学生姓名应与汇总表报名一致。
各个参赛队伍编码规则:□第一位:表示参赛队伍是本科或者专科。
1表示参赛队伍是本科学生,2表示参赛队伍是专科学生。
□第二位:表示队伍选择竞赛题目编号A、B、C、D、E、F、G、H、I、J。
□□第三位:2位数,表示学校代码。
见表。
□□第四位:2位数,表示学校参赛总数。
(如一共1组参赛队,此位填写“01”,如一共45组参赛队,此位填写“45”。
)□□第五位:2位数,表示学校参赛队选择此题目的参赛总数。
(如一共有9组参赛队,此位填写“09”。
)□□第六位:2位数,表示学校参数队伍选择此题目的编号。
(如1号队,填写01)例如“1A01441203”表示参赛队伍是本科学生,选择A题作为参赛题目,参赛学校北华大学,北华大学参赛总数44组,北华大学选择A题参赛队伍总数12组,本参赛队伍在北华大学A题编号03。
请各学校领导老师认真编写。
序号学校名称1 白城师范学院2 北华大学3 东北电力大学4 东北师范大学5 东北师范大学人文学院6 吉林大学7 吉林电子信息职业技术学院8 吉林工程技术师范学院9 吉林工商学院10 吉林工业职业技术学院11 吉林化工学院12 吉林建筑大学13 吉林建筑工程学院城建学院14 吉林农业大学15 吉林农业科技学院16 吉林省经济管理干部学院17 吉林师范大学18 吉林师范大学博达学院19 吉林铁道职业技术学院20 吉林医药学院21 空军航空大学22 四平职业大学23 延边大学24 长春大学25 长春光华学院26 长春工程学院27 长春工业大学28 长春工业大学人文信息学院29 长春建筑学院30 长春科技学院31 长春理工大学32 长春理工大学光电信息学院33 长春汽车高等专科学校34 长春师范大学35 装甲兵技术学院。
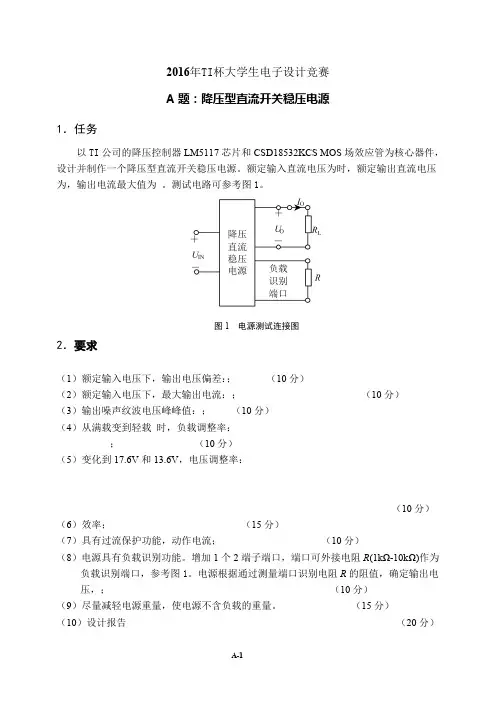
2016年全国大学生电子设计竞赛2016年7月28日摘要本设计以TI公司的MSP430G2553单片机作为控制核心,设计制作了一种降压型开关稳压电源。
该电源主电路为同步整流BUCK电路,通过LM5117驱动CSD18532KCS MOS场效应管实现稳压输出,电流检测电路使用TI的高精度检流芯片INA282实现对电路的保护,系统效率可达到89%。
达到了设计要求中的各项指标。
关键词:LM5117 同步整流BUCK电路MSP430G2553 INA282目录一、系统方案 (4)1.1 DC-DC驱动模块的比较与选择 (4)1.2 主控制器的比较与选择 (4)1.3 过流保护方案的比较与选择 (4)1.4 单片机供电模块的比较与选择 (5)二、系统理论分析与计算 (5)2.1 主要器件参数选择及计算 (5)2.1.1 定值电阻RT的计算 (5)2.1.2 输出电感L0的选取 (5)2.1.3 电流检测电阻Rs的选取 (5)2.1.4 输出电容C o的选取 (5)2.1.5 过流保护电路中检流电阻的选取 (6)2.2 提高效率的方法 (6)2.3 降低纹波的方法 (6)2.4 DC-DC变换方法 (6)2.5 稳压控制方法 (7)三、电路与程序设计 (7)3.1主回路与器件的选择 (7)3.1.1电路主回路 (7)3.1.2电路器件选择 (7)3.2 控制电路及程序 (8)3.2.1 控制电路 (8)3.2.2 主程序流程图 (8)3.2.3 部分源程序代码 (8)四、系统测试 (8)4.1 测试方案及条件 (8)4.1.1 测试仪器 (8)4.1.2 测试方法 (8)4.2 测试过程及结果 (8)4.3 测试结果分析 (9)附录1:程序流程图 (10)附录2:部分源代码 (12)VIN一、系统方案本设计采用BUCK 电流斩波电路,单片机控制输出两路PWM 信号经过TI 芯片IR2110驱动高端和低端N 沟道MOSFET ,通过控制PWM 的占空比来控制两个MOSFET 导通和关断的时间进而调节输出电压。

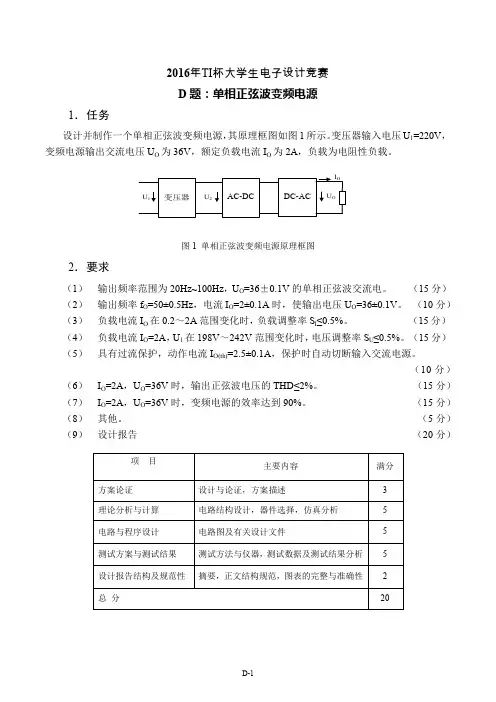
程控直流稳压电源(A 题)一、任务设计并制作直流稳压电源,输入电压范围为DC 10V ~30V ,输出电压为DC18V 。
直流稳压电源框图如下所示:DC/DC 变换阻性负载控制电路可调直流电源+-IN U o U +-IN I oI 二、要求在电阻负载条件下,使电源满足以下要求:1.基本要求(1)输入电压变化范围10V ~30V ,输出电压保持为18V ;(2)最大输出电流I Omax :1A ;参赛注意事项(1)2012年9月4日8:00竞赛正式开始。
不分本科组与高职高专组试题,本科组和高职高专组参赛队统一测试,分组评比奖项。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)参赛队必须在学校指定的竞赛场地内进行独立设计和制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)2012年9月8日9:00前将设计报告、制作实物及《登记表》封存,上交测试现场。
2012年吉林省大学生电子设计竞赛试题(3)输入电压U IN从10V~30V变化时,电压调整率S U≤2%(I O=1A);(4)电流I O从0~1A变化时,负载调整率S I≤5%(U IN=10V);(5)输出噪声纹波电压峰-峰值U OPP≤0.5V(U IN=10V~30V,U O=18V, I O =1A);(6)DC-DC变换器的效率≥70%(U O =18V, I O =1A);2.发挥部分(1) U IN从10V~30V变化时,电压调整率S U≤0.5%(I O =1A);(2) 电流I O从0~1A变化时,负载调整率S I≤1%(U IN=10V);(3) 效率,使≥85%(U O=18V, I O =1A);(4) 具有键盘设定功能,输入电压、输出电压、负载电流显示功能;(5) 具有过流保护功能,动作电流I oj=1.5±0.2A;(6) 其它。
吉林省大学生电子设计竞赛智能电动小车方案设计报告2012.9.6摘要本题目是采用MC9S12XS128单片机为智能小车的核心,坦克车体模型为载体,该智能小车具有红外循迹,光电对管避障,L298电机驱动等功能。
首先是由单片机产生周期性的PWM波,控制全桥驱动芯片L298N驱动2个直流电机来控制智能小车的转速和方向。
小车给电后,首先执行声音口令让小车启动,并进行语音提示,然后通过利用红外对管对一区黑线进行检测,进入二区与进入三区时对标志线1、2进行捕捉,信号通过单片机分析与处理后,输出PWM波控制小车行驶轨迹,进而实现小车的前进、后退、左转、右转,并安全倒库;进入三区时用光电开关检测障碍物,当光电开关对障碍物进行扫描之后有一个返回值时,并通过调节PWM的占空比进行转弯避障。
对于小车的制作主要有硬件的焊接组装(红外对管循迹模块,电源模块,语音芯片外接电路等)、软件编程和调试(CodeWarrior Development Studio for S12(X) V5.0),整个过程中涉及到焊接工艺、单片机接口知识和C语言编程,飞思卡尔MC9S12XS128芯片外设电路等。
小车的最终效果能够在行车道上行驶一圈,实现定点停车(不超过3秒)、能进行声光提示,整个规定动作的时间不大于4分钟。
关键字:MC9S12XS128 L298N驱动红外检测无线通信细分器激光引言随着传感器技术和自动控制技术的飞速发展,机械、电气和电子信息已经不再明显分家,自动控制在工业领域中的地位已经越来越重要,“智能”这个词也已经成为了热门词汇。
作为机械行业的代表产品---汽车,其与电子信息产业的融合速度也显著提高,呈现出两个明显的特点:一是电子装置占汽车整车的价值量比例逐步提高,汽车将由以机械产品为主向高级的机电一体化方向发展,汽车电子产业也很有可能成为依托整车制造业和用车提升配置而快速成为新的增长点;二是汽车开始向电子化、多媒体化和智能化方向发展,使其不仅作为一种代步工具、同时能具有交通、娱乐、办公和通讯等多种功能。
一、历届竞赛赛题解析第一届1994年全国大学生电子设计竞赛题目一、简易数控直流电源二、多路数据采集系统第二届1995年全国大学生电子设计竞赛题目一、实用低频功率放大器二、实用信号源的设计和制作三、简易无线电遥控系统四、简易电阻、电容和电感测试仪第三届1997年全国大学生电子设计竞赛题目A题直流稳定电源B题简易数字频率计C 题水温控制系统D题调幅广播收音机*第四届1999年全国大学生电子设计竞赛题目A题测量放大器B题数字式工频有效值多用表C题频率特性测试仪D题短波调频接收机E题数字化语音存储与回放系统第五届2001年全国大学生电子设计竞赛题目A题波形发生器B题简易数字存储示波器C题自动往返电动小汽车D题高效率音频功率放大器E题数据采集与传输系统F题调频收音机第六届2003年全国大学生电子设计竞赛题目A题电压控制LC振荡器B题宽带放大器C题低频数字式相位测量仪D题简易逻辑分析仪E题简易智能电动车F题液体点滴速度监控装置第七届2005年全国大学生电子设计竞赛题目A题正弦信号发生器B题集成运放参数测试仪C题简易频谱分析仪D题单工无线呼叫系统E题悬挂运动控制系统F题数控直流电流源G题三相正弦波变频电源- - 总结资料纵观历届赛题设计方向大致可以分为四类一功能电路兼控制类系统设计(11项)第一届1994年全国大学生电子设计竞赛题目一、简易数控直流电源第二届1995年全国大学生电子设计竞赛题目一、实用低频功率放大器二、实用信号源的设计和制作第三届1997年全国大学生电子设计竞赛题目A题直流稳定电源第四届1999年全国大学生电子设计竞赛题目A题测量放大器第五届2001年全国大学生电子设计竞赛题目D题高效率音频功率放大器第六届2003年全国大学生电子设计竞赛题目A题电压控制LC振荡器B题宽带放大器第七届2005年全国大学生电子设计竞赛题目A题正弦信号发生器F题数控直流电流源G题三相正弦波变频电源.docin.合指标的要求。
2016 年吉林省大学生电子设计竞赛多电机悬吊控制系统(G 题) 【本科组】2016 年 9 月 3 日摘要本系统以 C8051F040 单片机为核心,加以步进电机驱动、OCMJ5X108 液晶显 示屏、键盘、超声波发声器、陀螺仪数据采样系统等电路组成,建立了 1 个由 4 个电机滑轮同时控制漏斗完成指定动作的机械系统。
此系统良好地建立了步进电 机脉冲数与所完成指令的各个参数之间的模型关系。
模型中忽略了次要因素,保 留了主要因素, 实施较为容易简便。
该装置使用了 HC-SR04 超声波发声器和陀螺 仪, 在实行的时候对精确度有一定保障。
该设计较好实现了多电机悬吊控制系统 的所要求的功能。
目录1 系统方案........................................................................................................................................ 1 1.1 电机驱动模块的论证与选择 ............................................................................................ 1 1.2 漏斗水平调节模块的论证与选择 .................................................................................... 1 1.3 控制系统的论证与选择 .................................................................................................... 1 2 系统理论分析与计算.................................................................................................................... 1 2.1 漏斗上下移动模型的分析 .............................................................................................. 2 2.1.1 脉冲数与收放量的关系 ......................................................................................... 2 2.1.2 脉冲周期数与距地面高度的关系式 ..................................................................... 2 2.2 光束左右水平移动和倾斜角度的分析与计算 ................................................................ 2 3 电路与程序设计............................................................................................................................ 2 3.1 电路的设计......................................................................................................................... 2 3.1.1 系统总体框图 .......................................................................................................... 2 3.1.2 马达驱动模块子系统框图与电路原理图 ............................................................. 3 3.1.3 键盘输入模块子系统框图与电路原理图 ............................................................. 3 3.1.4 电源模块.................................................................................................................. 4 3.1.5 电源...........................................................................................................................4 3.2 程序的设计......................................................................................................................... 4 3.2.1 程序功能描述与设计思路 ...................................................................................... 4 3.2.2 程序流程图 .............................................................................................................. 5 4 测试方案与测试结果.................................................................................................................... 5 4.1 测试方案............................................................................................................................. 5 4.2 测试条件与仪器................................................................................................................ 6 4.3 测试结果及分析................................................................................................................ 6 4.3.1 测试结果(数据) ....................................................................................................... 6 4.3.2 测试分析与结论 ...................................................................................................... 6 附录 1:电路原理图........................................................................................................................ 7 附录 2:源程序................................................................................................................................ 8多电机悬吊控制系统(G 题) 【本科组】1 系统方案本系统主要由电机驱动模块、调节模块和控制模块组成,下面分别论证这几 个模块的选择。
历年全国电子设计大赛试题[1]历年全国电子设计大赛试题总汇楼主打印第1 页共57 页历年全国电子设计大赛试题总汇第一届(1994 年)全国大学生电子设计竞赛题目 (3)题目一简易数控直流电源 (3)题目二多路数据采集系统 (4)第二届(1995 年)全国大学生电子设计竞赛题目 (5)题目一实用低频功率放大器 (5)题目二实用信号源的设计和制作 (6)题目三简易无线电遥控系统 (7)题目四简易电阻、电容和电感测试仪 (8)第三届(1997 年)全国大学生电子设计竞赛题目 (9)A 题直流稳定电源 (9)B 题简易数字频率计 (10)C 题水温控制系统 (11)D 题调幅广播收音机* (12)第四届(1999 年)全国大学生电子设计竞赛题目 (13)A 题测量放大器 (13)B 题数字式工频有效值多用表 (14)C 题频率特性测试仪 (16)D 题短波调频接收机 (17)E 题数字化语音存储与回放系统 (18)第五届(2001 年)全国大学生电子设计竞赛题目 (19)A 题波形发生器 (19)B 题简易数字存储示波器 (20)C 题自动往返电动小汽车 (21)D 题高效率音频功率放大器 (22)E 题数据采集与传输系统 (23)F 题调频收音机 (25)第六届(2003 年)全国大学生电子设计竞赛题目 (26)电压控制LC 振荡器(A 题) (26)宽带放大器(B 题) (27)低频数字式相位测量仪(C 题) (28)简易逻辑分析仪(D 题) (30)第2 页共57 页简易智能电动车(E 题) (31)液体点滴速度监控装置(F 题) (33)第七届(2005 年)全国大学生电子设计竞赛题目 (34)正弦信号发生器(A 题) (34)集成运放参数测试仪(B 题) (34)简易频谱分析仪(C 题) (37)单工无线呼叫系统(D 题) (38)悬挂运动控制系统(E 题) (39)数控直流电流源(F 题) (41)三相正弦波变频电源(G 题) (42)第八届(2007 年)全国大学生电子设计竞赛题目 (43)音频信号分析仪(A 题)【本科组】 (43)无线识别装置(B 题)【本科组】 (44)数字示波器(C 题)【本科组】 (46)程控滤波器(D 题)【本科组】 (47)开关稳压电源(E 题)【本科组】 (49)电动车跷跷板(F 题)【本科组】 (50)积分式直流数字电压表(G 题)【高职高专组】 (53)信号发生器(H 题)【高职高专组】 (54)可控放大器(I 题)【高职高专组】 (55)电动车跷跷板(J 题)【高职高专组】 (56)第3 页共57 页第一届(1994 年)全国大学生电子设计竞赛题目题目一简易数控直流电源一、设计任务设计出有一定输出电压范围和功能的数控电源。
全国大学生电子设计竞赛历届题目第一届(1994年)全国大学生电子设计竞赛题目................................................................................... - 2 - 题目一简易数控直流电源 ................................................................................................................. - 2 - 题目二多路数据采集系统 ................................................................................................................. - 3 - 第二届(1995年)全国大学生电子设计竞赛题目................................................................................... - 4 - 题目一实用低频功率放大器 ............................................................................................................. - 4 - 题目二实用信号源的设计和制作 ..................................................................................................... - 5 - 题目四简易电阻、电容和电感测试仪.............................................................................................. - 5 - 第三届(1997年)全国大学生电子设计竞赛题目................................................................................... - 6 - A题直流稳定电源 ............................................................................................................................. - 6 - B题简易数字频率计.......................................................................................................................... - 7 - C题水温控制系统................................................................................................... 错误!未定义书签。