UCos-ii_在STM32上的移植详解
- 格式:pdf
- 大小:4.46 MB
- 文档页数:30

前言:说点废话,网上有很多关于uCOS-ii移植的文章,好多都是千篇一律,理论性很强,分析了一大堆虚头巴脑的东西,真想问他们,你确定你分析的这些东西是需要你做的工作吗?实操性严重欠缺。
这方面我也走了很多弯路,下面就将自己的移植过程一步步的记录下来,也给大家做做参考。
首先,简单总结一下移植的大概过程:(1)去uC/OS-ii官网下载你要移植芯片CPU的相关案例,不一定完全对应,那就找相应系列吧。
(2)编程环境一般有两种,分别是IAR和MDK,这个根据你自己的编程环境进行下载。
(3)本案例需要将uC/OS-II 移植到STM32F103ZET6上,而我使用的编程环境是MDK,很遗憾,官网上提供的案例是基于IAR的,所以要基于IAR的案例进行更改。
(4)使用MDK创建一个无操作系统的最简单程序,确保这个程序能够使用,这样做的目的是为了一步步的排查错误,假如无操作系统时,都有错误,移植过程中也肯定会有编译错误,那么在排查错误的时候也就增加了难度,不会写物操作系统的简单程序怎么办。
那就不要往下看了。
(5)移植的最大的改动主要有两部分,一个是一些头文件的增减,另外一个就是向量表中PendSV_Handler和SysTick_Handler的修改。
这里我要吐槽一下,网上说了一大堆关于什么OS_CPU.H的更改还有各种函数的的分析,这都是扯淡。
这些根本就不用移植者去修改,官网提供的案例都已经提供了,除非你选择移植的CPU是比较偏的,那么这些东西需要移植者自己去编写。
好了,下面就开始详细的记录怎么去移植。
一、创建一个无操作系统的简单裸板系统1.创建源文件工程文件夹,如下图所示:其中文件夹“CMSIS”为内核的接口,包含的文件如下图文件夹STM32_StdPeriph为固件驱动文件夹,这个把STM32的固件全都添加进去即可。
文件夹User为其他文件,如下图所示:文件夹Output和List主要是放那些编译产生的乱七八糟的文件,为了使工程代码更加简洁。
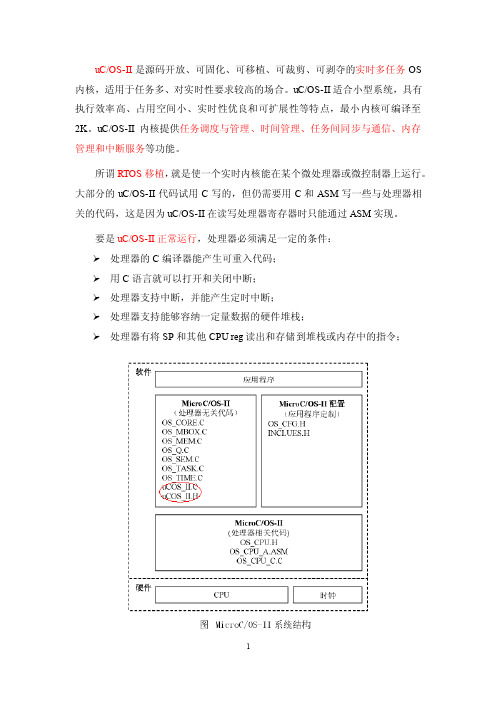
uC/OS-II是源码开放、可固化、可移植、可裁剪、可剥夺的实时多任务OS 内核,适用于任务多、对实时性要求较高的场合。
uC/OS-II适合小型系统,具有执行效率高、占用空间小、实时性优良和可扩展性等特点,最小内核可编译至2K。
uC/OS-II内核提供任务调度与管理、时间管理、任务间同步与通信、内存管理和中断服务等功能。
所谓RTOS移植,就是使一个实时内核能在某个微处理器或微控制器上运行。
大部分的uC/OS-II代码试用C写的,但仍需要用C和ASM写一些与处理器相关的代码,这是因为uC/OS-II在读写处理器寄存器时只能通过ASM实现。
要是uC/OS-II正常运行,处理器必须满足一定的条件:处理器的C编译器能产生可重入代码;用C语言就可以打开和关闭中断;处理器支持中断,并能产生定时中断;处理器支持能够容纳一定量数据的硬件堆栈;处理器有将SP和其他CPU reg读出和存储到堆栈或内存中的指令;uC/OS-II移植工作主要包括以下三个方面的内容:(1)修改与处理器核编译器相关的代码:主要在includes.h中,修改数据类型定义说明,OS_ENTER_CRITICAL()、OS_EXIT_CRITICAL()和堆栈增长方向定义OS_STK_GROWTH。
(2)用C语言编写10个移植相关的函数:主要在OS_CPU_C.C中,包括堆栈初始化OSTaskStkInit()和各种回调函数。
(3)编写4个汇编语言函数:主要在OS_CPU_A.ASM中,包括:_OSTickISR //时钟中断处理函数_OSIntCtxSW //从ISR中调用的任务切换函数_OSCtxSW //从任务中调用的任务切换函数_OSStartHighRdy //启动最高优先级的任务uC/OS-II移植的关键问题:(1)临界区访问:uC/OS-II需要先禁止中断再访问代码临界段,并且在访问完毕后重新允许中断,这就使得uC/OS-II能够保护临界段代码免受多任务或ISR的破坏。

基于μC/OS_II的以太网移植实例目录第一章以太网移植准备工作 (2)1.1 硬件平台 (2)1.2 软件平台 (2)第二章以太网移植步骤 (4)2.1 文件结构以及文件说明 (4)2.2以太网文件移植 (5)2.3MDK中文件的导入 (5)2.4 程序中需要编辑的代码 (8)第三章以太网任务创建以及初始化流程 (11)3.1 以太网任务创建 (11)3.2 以太网初始化流程 (12)3.3 以太网数据收发流程 (12)第四章测试以太网连接以及任务间通信 (14)4.1Ping命令测试 (14)4.2 网络调试助手测试 (14)第一章以太网移植准备工作以移动基站的电表管理系统为背景,探讨基于μC/OS嵌入式系统的以太网移植方法。
移动基站电表管理系统终端的基本功能就是上位机通过以太网发送命令或数据给终端,终端收到后,再通过485通信对电表执行相应的动作,最后,终端把得到的信息处理后再次通过以太网上传回来。
这里重点是把以太网协议栈移植到程序中来,以创建一个以太网通信任务。
1.1 硬件平台硬件平台是主芯片为STM32F107VC的金牛开发板,开发板上已集成有以太网功能模块和RS485功能模块。
只是在开发板上RS-485与RS-232接口共用了微处理器的接收串口,需要设置JP4,且配置为1-2,如表1.1所示。
金牛开发板支持两种以太网接口模式,一种是MII接口模式,另一种是RMII接口模式。
这里选用MII接口模式,根据表1.2对跳线JP2、JP6、JP7、JP8、JP12进行相应的配置。
1.2 软件平台软件平台为RVMDK软件。
RVMDK是由ARM编译器RVCT与Keil的工程管理、调试仿真工具集成,RVMDK是业界最好的Cortex-M3开发工具之一,它拥有流畅的用户界面与强大的仿真功能,是一款非常强大的ARM微控制器开发工具。
移植前需要熟悉RVMDK软件的使用。
移植过程中需要用到如图1.1和图1.2所示文件,一个是基于μC/OS_II的移动基站电表管理系统终端程序,另一个是基于μC/OS_II系统以太网移植文件。

芯片型号stm32f103ve,编译器IAR for ARM 6.3准备材料在st官网上下载最新的固件库(现在是v3.5.0),这个库作用非常大,可以帮我们快速开发出想要的功能,但是网上有很多人说这个库有漏洞,本人水平有限就不得而知了,这里直接上地址。
解压后得到目录如下图在ucos官网上下载移植stm32移植版的ucosii代码,这个需要注册一下,不多说直接上接上地址下载安装后得到目录如下图建立工程首先建三个文件目录:CMSIS用来存放cpu和系统的相关的文件、STM32F10x_StdPeriph_Driver用来存放cpu的硬件驱动、ucosii用来存放ucos的源代码。
复制固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\CoreSupport目录下的core_cm3.c和core_cm3.h到工程文件夹下的CMSIS目录中。
复制固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x目录下的stm32f10x.h、system_stm32f10x.c、system_stm32f10x.h三个文件到工程文件夹下的CMSIS目录中。
在固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\iar目录中选取相应的开始文件,这里我选取的是startup_stm32f10x_hd.s复制到到工程文件夹下的CMSIS目录中。
复制固件库\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Template目录中的stm32f10x_conf.h、stm32f10x_it.c、stm32f10x_it.h三个文件到工程文件夹下的CMSIS目录中。
stm32 UCGUI 完美移植作者:Changing发表时间:09-16 04:13分类:电子相关1 Comment前一篇:stm32 DA 数模转换后一篇:Stm32 SWD 下载 调试配置UCGUI是一种嵌入式应用中的图形支持系统。
它设计用于为任何使用LCD图形显示的应用提供高效的独立于处理器及LCD控制器的图形用户接口,它适用单任务或是多任务系统环境, 并适用于任意LCD控制器和CPU下任何尺寸的真实显示或虚拟显示。
它的设计架构是模块化的,由不同的模块中的不同层组成,由一个LCD驱动层来包含所有对LCD的具体图形操作。
UCGUI可以在任何的CPU上运行,因为它是100%的标准C代码编写的。
类似程序还有国产的一个MINIGUI (/zhcn/),MiniGUI 是一个自由软件项目。
其目标是提供一个快速、稳定、跨操作系统的图形用户界面(GUI)支持系统,尤其是基于 Li nux/uClinux、eCos 以及其他传统 RTOS(如 VxWorks、ThreadX、uC/OS-II、Nucleus 等)的实时嵌入式操作系统。
有机会尝试下,支持下国产,毕竟国内这样的公司不多。
这里移植的UCGUI3.90a版本,虽然已经有更新的版本,比如UCGUI3.98、甚至4.04版本。
但是目前来说只有这个版本的代码是最全的,包括了JPEG , MULTILAYER , MEMDEV ,AntiAlias等模块。
一直想尝试做一个数码相册,JEPG模块自然少不了,所以移植了这个版本。
UCGUI390a 下载整个移植过程,让LCD显示图案倒是没花多少时间,资料也比较多,但是在移植触摸屏的时候卡了好几天,然后又是 UCGUI 指针图标 移动有重影(LCD读取像素颜色函数有问题)。
总之移植是个累人的活首先需要保证你的LCD驱动和触摸屏驱动是有效的,如果你的LCD也是ili93xx 控制器 XPT2046控制器的触摸屏可以参考 stm32 驱动 T F T LCD stm32 驱动 触摸屏 两篇文章UCGUI的文件数量很大,主要用到UCGUI390a/Start/Con f ig 和 UCGUI390a/Start/GUI两个文件夹下文件,不过文件数量也已经很多了 。
一步步移植uCOS-IIandLwIP(一)STM32F103ZE下移植uCOS-II and LwIP 汇总本文主要记录嵌入式实时操作系统uCOS-II(Ver 2.85)和轻量型TCP/IP协议栈LwIP(Ver 1.4.1)在32bit单片机STM32F103ZE上的移植过程,并列举几个simple examples说明两者工作原理。
本文的叙述原则是“用到什么知识点,就查阅相关资料”,对于其它延伸知识点不再概述。
所需物资:- 硬件开发平台,本平台网卡为DM9000A- uCOS-II(Ver 2.85)源码,可直接从Micrium官网下载uCOS 在cortex-M3上的移植例程uCOSII-ST-STM32F103ZE-SK - LwIP(Ver 1.4.1)源码,下载链接LwIP1.4.1一、Lwip移植TCP/IP协议分为网络链路层、网络层、传输层和应用层四个部分,网络链路层主要涉及底层硬件驱动的编写,另外三个上次协议一般采用协议栈的方式软件实现。
要实现与其它网络设备通信,首当其冲的是要移植好底层网卡驱动。
LwIP协议栈已经为我们提供了网络链路底层接口,我们要做到主要工作涉及到以下几个方面:- 单片机与网卡DM9000芯片的通信;- 完善LwIP协议栈文件ethernetif.c接口函数,该部分的难点在于实现LwIP规定的struct pbuf类型的数据包与网卡数据之间相互转换;- 上层软件协议的simple explain;1、网卡DM9000底层驱动的编写首先查阅DM9000的Datasheet(建议直接从芯片官网上查找,一般会有该芯片的Application note or Demo)本文主要是运用DM9000的16-bit mode,其总线形式类似与intel 8080总线,涉及读写指令和数据的控制引脚为CS#、IOW#、IOR#、CMD,数据总线引脚SD0~SD15,中断引脚INT。
第6期2020年12月机电元件ELECTROMECHANICALCOMPONENTSVol 40No 6Dec 2020收稿日期:2020-10-20基于STM32单片机的uC/OS-II操作系统移植张中前(贵州航天电器股份有限公司,贵州贵阳,550009) 摘要:网络技术和信息技术的发展,嵌入式系统应用越来越普及,嵌入式设备的应用也越来越多。
uC/OS-II广泛应用于路由器、飞行器及工业控制等。
uC/OS-II操作系统执行效率高,占用存储空间少,具有实时性及可扩展性等优点,在小型嵌入式设备中具有广泛应用。
本文介绍了基于ARMCORTEXM3系列单片机上的uC/OS-II移植,对电子控制组件的设计具有参考作用。
关键词:实时操作系统;uC/OS-II;内存管理;任务管理;STM32;移植Doi:10.3969/j.issn.1000-6133.2020.06.015中图分类号:TN784 文献标识码:A 文章编号:1000-6133(2020)06-0057-051 引言操作系统是裸机的第一层软件,操作系统直接运行在硬件上,上层软件通过提供应用程序接口(API函数),实现对底层硬件的访问,同时,通过操作系统实现对多个上层应用软件(任务)管理,实现对硬件CPU管理、存储管理、I/O接口管理及文件管理,如图1所示。
图1 操作系统功能组成示意图 STM32系列单片机以其优良的价格,大容量的FLASH及RAM存储空间,极易用于较为复杂的控制系统;在STM32单片机上进行uC/OS-II实时操作系统的移植,提高了产品的设计灵活性,实现较为复杂的系统功能;通过将开源的uC/OS-II移植在STM32单片机上,以其较为低廉的硬件成本获得较高的使用性能,具有良好的应用前景。
2 uC/OS-II操作系统2.1 uC/OS-II操作系统的基本特征uC/OS-II是一个完整的、可移植、可固化、可剪裁的基于优先级调度的抢占式实时多任务操作系统;它能够在外界事件或数据产生时,能够接收图2 uC/OS-II文件结构示意图并以足够快的速度响应,其处理的结果又能够在规定的时间内输出,并控制所有实时任务协调、一致运行。