伪距单点定位
- 格式:pptx
- 大小:747.13 KB
- 文档页数:20
北斗伪距单点定位算法的流程北斗伪距单点定位算法是基于卫星信号的到达时间差来确定接收机的位置。
The single-point positioning algorithm for BeiDou pseudorange is based on the arrival time difference of satellite signals to determine the position of the receiver.首先,接收机接收到至少4颗卫星的信号,并记录每颗卫星信号的到达时间。
First, the receiver receives signals from at least 4 satellites and records the arrival time of each satellite signal.然后,接收机通过将到达时间转化为伪距值,并结合卫星位置信息,计算出接收机和每颗卫星之间的距离。
Then, the receiver converts the arrival time into pseudorange values and, combined with satellite positioninformation, calculates the distance between the receiver and each satellite.接着,利用这些距离信息进行计算,确定接收机的位置。
Next, using this distance information for calculation, the position of the receiver is determined.在计算定位结果时,需要考虑卫星钟差和大气延迟等影响因素。
When calculating the positioning result, factors such as satellite clock error and atmospheric delay need to be considered.最终得出接收机的经度、纬度和海拔高度信息。

卫星单点定位(Single Point Positioning, SPP)是GNSS(全球卫星定位系统)中最基础和常见的定位方式,其中伪距解算是实现单点定位的常用方法之一。
伪距解算是通过计算接收机和卫星之间的距离差(即伪距),来实现单点定位的方法。
具体步骤如下:
1. 接收机接收卫星信号,记录下每颗卫星的发射时间和接收时间。
2. 计算每颗卫星的伪距。
伪距是接收机和卫星之间的距离差,可以通过卫星的发射时间、接收时间和光速来计算。
3. 利用伪距数据,通过三角测量法计算出接收机的位置。
三角测量法需要至少四颗卫星的信号才能计算出接收机的位置,并且需要考虑误差来源,如大气延迟、钟差误差等。
4. 为了提高定位精度,可以采用差分技术(Differential Positioning, DP)或者精密定位技术(Precise Positioning)来削弱误差的影响。
需要注意的是,伪距解算虽然简单易行,但定位精度受到多种因素的影响,如卫星分布、天气状况、接收机性能等。
为了提高定位精度和可靠性,需要采用多种技术手段和方法,并结合实际应用场景进行优
化。
伪距单点定位python伪距单点定位是一种常见的卫星定位方法,它利用卫星和接收机之间的信号传播时间差来计算接收机的位置。
在这篇文章中,我将介绍伪距单点定位的基本原理和实现方法,并使用Python编程语言进行演示。
一、伪距单点定位的基本原理伪距单点定位是利用卫星和接收机之间的距离来确定接收机的位置。
当接收机接收到来自至少四颗卫星的信号时,可以通过测量卫星信号传播时间差来计算接收机到卫星的距离。
通过多个卫星的距离测量值,可以使用三角定位方法计算出接收机的位置。
二、伪距单点定位的实现步骤1. 接收卫星信号:使用GPS接收机接收来自卫星的信号。
接收机会接收到卫星的导航消息和伪距测量值。
2. 伪距测量:接收机通过测量卫星信号的传播时间来计算到卫星的距离。
伪距测量是通过接收机和卫星之间的时间差来计算的,需要考虑信号传播的速度和传播路径的影响。
3. 卫星位置计算:接收机需要知道卫星的位置信息才能计算出自己的位置。
卫星的位置信息可以通过卫星导航消息获得。
4. 接收机位置计算:通过测量多个卫星的距离,使用三角定位方法计算出接收机的位置。
三角定位方法可以使用加权最小二乘法来进行计算。
5. 位置解算:经过计算后,可以得到接收机的位置坐标。
这个坐标通常以经度、纬度和海拔高度的形式表示。
三、使用Python进行伪距单点定位的演示下面是一个使用Python进行伪距单点定位的简单演示:```pythonimport math# 定义卫星的位置信息satellites = [{'id': 'sat1', 'x': 10000, 'y': 20000, 'z': 30000},{'id': 'sat2', 'x': -20000, 'y': 15000, 'z': 25000},{'id': 'sat3', 'x': 5000, 'y': -10000, 'z': 20000},{'id': 'sat4', 'x': -15000, 'y': -20000, 'z': 35000}]# 定义接收机的位置receiver = {'x': 0, 'y': 0, 'z': 0}# 计算接收机到卫星的距离distances = []for sat in satellites:distance = math.sqrt((sat['x'] - receiver['x']) ** 2 + (sat['y'] - receiver['y']) ** 2 + (sat['z'] - receiver['z']) ** 2)distances.append(distance)# 输出接收机到卫星的距离for i in range(len(satellites)):print('接收机到{}的距离为:{}米'.format(satellites[i]['id'], distances[i]))# 使用三角定位方法计算接收机的位置x_sum = 0y_sum = 0z_sum = 0for i in range(len(satellites)):weight = 1 / distances[i] # 加权最小二乘法x_sum += satellites[i]['x'] * weighty_sum += satellites[i]['y'] * weightz_sum += satellites[i]['z'] * weightreceiver['x'] = x_sum / len(satellites)receiver['y'] = y_sum / len(satellites)receiver['z'] = z_sum / len(satellites)# 输出接收机的位置print('接收机的位置坐标为:({}, {}, {})'.format(receiver['x'], receiver['y'], receiver['z']))```以上是一个简单的伪距单点定位的Python演示,通过计算接收机到卫星的距离,并使用加权最小二乘法计算接收机的位置。
matlab伪距单点定位Matlab伪距单点定位伪距单点定位是一种利用卫星信号进行定位的方法,通过测量卫星信号的传播时间差来计算接收器与卫星之间的距离,并利用多个卫星的距离信息进行定位。
Matlab作为一种强大的数学计算工具,可以方便地实现伪距单点定位算法。
伪距单点定位的原理是利用接收器接收到的卫星信号的传播时间差来计算接收器与卫星之间的距离。
接收器通过测量卫星信号的到达时间差来计算伪距,然后利用伪距信息进行定位。
伪距是接收器接收到卫星信号的传播时间与光速之间的乘积,即伪距=传播时间×光速。
在实际应用中,接收器通常能够接收到多个卫星的信号,因此可以利用多个卫星的伪距信息进行定位。
伪距单点定位的核心是通过多个卫星的伪距信息求解接收器的位置坐标。
这个问题可以表示为一个数学模型,通过最小二乘法求解,得到接收器的位置坐标。
在Matlab中实现伪距单点定位算法需要以下几个步骤:1. 数据预处理:首先需要将接收器接收到的卫星信号数据进行预处理,包括数据解码、信号强度计算等。
2. 卫星位置计算:利用卫星星历数据,计算卫星在给定时刻的位置。
3. 伪距计算:通过测量卫星信号的传播时间差,计算接收器与卫星之间的伪距。
4. 伪距单点定位:利用多个卫星的伪距信息,通过最小二乘法求解接收器的位置坐标。
5. 定位结果分析:对定位结果进行分析和评估,包括精度评估、误差分析等。
在实际应用中,伪距单点定位算法还需要考虑多种误差的影响,包括钟差误差、大气延迟误差、多径效应等。
这些误差会对定位结果产生影响,需要进行误差补偿和校正。
Matlab伪距单点定位是一种利用卫星信号进行定位的方法,通过测量卫星信号的传播时间差来计算接收器与卫星之间的距离,并利用多个卫星的距离信息进行定位。
Matlab作为强大的数学计算工具,可以方便地实现伪距单点定位算法。
伪距单点定位的实现主要包括数据预处理、卫星位置计算、伪距计算、伪距单点定位和定位结果分析等步骤。
GPS伪距单点定位⼀计算流程GPS单点定位的原理⽐较简单,主要就是空间距离的后⽅交会,⽤⼀台接收机同时接受四个或者以上卫星的信号得出卫星的位置坐标和卫星与接收机的距离,运⽤后⽅交会解算出接收机的三维坐标。
其中,接收机钟误差作为⼀个参数参与解算。
如果观测的卫星数⽬多于四颗,则采⽤最⼩⼆乘法进⾏平差求解。
1,读取数据包括读取O⽂件和N⽂件⾥的数据O⽂件⾥包括头⽂件和观测数据⽂件。
头⽂件⾥要读取出观测⽇期、接收机近似坐标,观测间隔,观测数据类型等。
观测数据⽂件包括观测时间,卫星数量,卫星质量标记,卫星的伪随机编号,之后分每个历元有对各颗卫星的观测数据,例如,P1、P2、L1、L2,要将这些数据读取出来。
N⽂件⾥包含的数据种类⽐较多,主要包括卫星的星历数据,通过这些数据可以求解出卫星的位置坐标。
数据包括卫星钟差参考时刻、卫星星历参考时刻,以及参考时刻升交点⾚径、参考时刻轨道倾⾓等好多参数信息。
2,计算卫星位置卫星计算位置⾥⾯采⽤模块函数的⽅式,可以直接调⽤。
在读取N⽂件中的数据之后,可以调⽤这些已经读出来的数据进⾏使⽤,函数提供两个形参,⼀个是星历数据的编号,另外⼀个是卫星信号发射时刻。
计算过程⽐较繁琐,⼀步⼀步的算就⾏。
3,交会定位计算⼀般每个历元的卫星数⽬不⽌四颗,通常采⽤最⼩⼆乘法进⾏平差求解。
公式为:V=AδX-L。
在具体计算的时候,⾸先要对(1)式进⾏线性化,得到矩阵A,L,这中间要⽤到很多矩阵的运算。
在求得卫星位置之后,要对O⽂件中每个历元⾥的卫星编号与N⽂件中的卫星编号进⾏匹配,如果匹配成功,再对时间进⾏匹配,如果时间差⼩于两个⼩时,那么该数据可以⽤于运算。
就这样,⼀个历元⾥匹配出的卫星数⽬超过4个的话,就可以通过平差计算出接收机的坐标了。
4,GPS时间的计算GPS时间的计算⽐较简单,计算出参考1980年1⽉6⽇0时0分0秒的不⾜⼀周的秒数。
主要在于判断所在的年是否为闰年,是否超过2⽉份,其他的问题就⽐较简单,采⽤⼀个Select Case的条件语句就可以了,函数最后得到不⾜⼀周的秒数就⾏。
RTKLIB是一种用于实时定位和测量的开源软件,它支持全球导航卫星系统(GNSS),包括GPS、GLONASS、Galileo和北斗。
在RTKLIB 中,伪距单点定位是一种常用的定位方法,它通过测量接收机和卫星之间的伪距距离来实现定位。
在伪距单点定位中,最小二乘法是一种常用的数学模型,它通过最小化测量值与估计值之间的误差平方和,来估计未知参数。
在RTKLIB中,最小二乘法被广泛应用于伪距单点定位中,通过对接收机和卫星之间的伪距距离进行最小二乘估计,来实现定位。
伪距单点定位最小二乘法的算法主要包括以下步骤:1. 数据采集:需要在接收机上采集卫星信号的伪距数据。
2. 估计参数:利用最小二乘法对接收机位置和钟差等参数进行估计。
3. 残差计算:计算估计值与测量值之间的残差,即观测值与估计值之间的差值。
4. 参数调整:根据残差的大小,调整参数的估计值,使残差最小化。
5. 定位结果:通过调整后的参数估计值,得到接收机的定位结果。
伪距单点定位最小二乘法在实际应用中具有一定的优势和局限性。
优势在于算法简单易懂,计算速度较快,适用于单点定位的室外环境。
然而,由于伪距单点定位依赖于接收机与卫星之间的伪距距离,容易受到环境遮挡、多径效应等因素的影响,精度较低,定位误差较大。
在实际应用中,为了提高伪距单点定位最小二乘法的精度和稳定性,可以结合多频观测、多站观测、差分定位等技术,以及对环境遮挡的优化和多径效应的抑制,来改善定位精度。
另外,还可以考虑使用RTK(实时运动定位)技术,通过基站进行差分改正,进一步提高定位精度和可靠性。
伪距单点定位最小二乘法作为RTKLIB定位的一种常用方法,在实际应用中需要结合多种技术和方法,以提高定位精度和可靠性。
通过不断的优化和改进,可以更好地适应各种复杂的定位环接下来,让我们深入探讨一下伪距单点定位最小二乘法在RTKLIB中的具体应用。
我们来详细了解一下伪距单点定位的原理和基本步骤。
1. 伪距单点定位原理伪距单点定位是一种基于GNSS测量解算的定位方法,它通过测量接收机和卫星之间的伪距距离来确定接收机的位置。
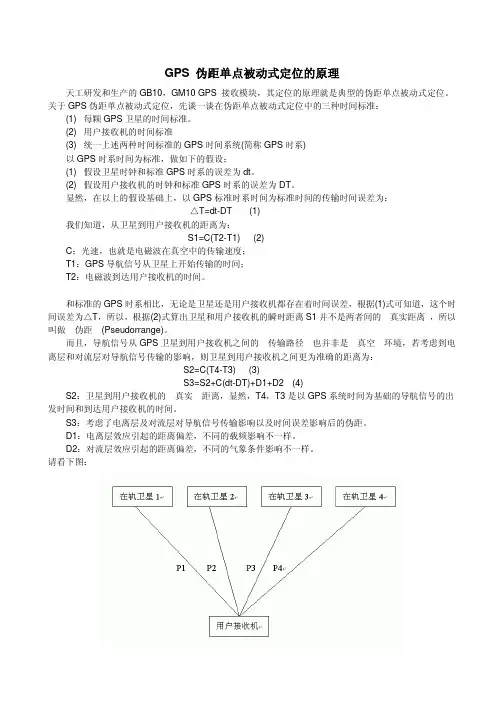
GPS 伪距单点被动式定位的原理天工研发和生产的GB10,GM10 GPS 接收模块,其定位的原理就是典型的伪距单点被动式定位。
关于GPS伪距单点被动式定位,先谈一谈在伪距单点被动式定位中的三种时间标准:(1) 每颗GPS卫星的时间标准。
(2) 用户接收机的时间标准(3) 统一上述两种时间标准的GPS时间系统(简称GPS时系)以GPS时系时间为标准,做如下的假设:(1) 假设卫星时钟和标准GPS时系的误差为dt。
(2) 假设用户接收机的时钟和标准GPS时系的误差为DT。
显然,在以上的假设基础上,以GPS标准时系时间为标准时间的传输时间误差为:△T=dt-DT (1)我们知道,从卫星到用户接收机的距离为:S1=C(T2-T1) (2)C:光速,也就是电磁波在真空中的传输速度;T1:GPS导航信号从卫星上开始传输的时间;T2:电磁波到达用户接收机的时间。
和标准的GPS时系相比,无论是卫星还是用户接收机都存在着时间误差,根据(1)式可知道,这个时间误差为△T,所以,根据(2)式算出卫星和用户接收机的瞬时距离S1并不是两者间的出真实距离瞬,所以叫做出伪距瞬(Pseudorrange)。
而且,导航信号从GPS卫星到用户接收机之间的瞬传输路径瞬也并非是瞬真空瞬环境,若考虑到电离层和对流层对导航信号传输的影响,则卫星到用户接收机之间更为准确的距离为:S2=C(T4-T3) (3)S3=S2+C(dt-DT)+D1+D2 (4)S2:卫星到用户接收机的瞬真实瞬距离,显然,T4,T3是以GPS系统时间为基础的导航信号的出发时间和到达用户接收机的时间。
S3:考虑了电离层及对流层对导航信号传输影响以及时间误差影响后的伪距。
D1:电离层效应引起的距离偏差,不同的载频影响不一样。
D2:对流层效应引起的距离偏差,不同的气象条件影响不一样。
请看下图:上图中,P1,P2,P3,P4为在轨卫星到用户接收机的几何距离,假设在轨卫星1的三维坐标为(X1,Y1,Z1),用户接收机的三维坐标为(Xu ,Yu ,Zu ),很明显:P1= Zu)-(Z1+Yu)-(Y1+ Xu)-(X1222 (5)P2= Zu)-(Z2+Yu)-(Y2+ Xu)-(X2222 (6)P3= Zu)-(Z3+Yu)-(Y3+ Xu)-(X3222 (7)P4= Zu)-(Z4+Yu)-(Y4+ Xu)-(X4222 (8)根据(4)式,我们可以知道,根据导航信号传输时间算出的伪距S3是用户三维坐标和在轨卫星三维坐标的函数,则我们有:S3=Pn+ C(dt-DT)+D1+D2 (n=1,2,3,4比。
matlab伪距单点定位Matlab伪距单点定位是一种利用卫星信号进行定位的方法。
在现代导航系统中,伪距定位是最常见和最基础的定位方法之一。
本文将介绍伪距单点定位的原理、Matlab实现以及一些应用案例。
一、原理伪距单点定位是利用接收到的卫星信号的传输时间差来计算接收机的位置。
在伪距单点定位中,接收机需要至少接收到4颗卫星的信号才能进行定位。
接收机通过测量卫星信号的传输时间差,即伪距,来计算接收机与卫星之间的距离。
利用多个卫星的伪距信息,可以通过三角定位法计算出接收机的位置。
二、Matlab实现Matlab提供了一些工具箱和函数来实现伪距单点定位。
首先,需要导入卫星轨道数据和接收机的观测数据。
然后,使用内置函数进行数据处理和计算。
最后,通过绘图等方式展示定位结果。
1. 导入数据:使用Matlab提供的函数将卫星轨道数据和接收机的观测数据导入到工作环境中。
2. 数据处理:对导入的数据进行处理,包括卫星信号的解码和伪距的计算。
使用Matlab提供的函数可以方便地进行数据处理。
3. 定位计算:使用三角定位法计算接收机的位置。
根据伪距信息和卫星的已知位置,可以通过求解方程组得到接收机的位置坐标。
4. 结果展示:使用Matlab提供的绘图函数,将定位结果以图形的形式展示出来。
可以绘制接收机的位置与卫星的分布图、误差分析图等。
三、应用案例伪距单点定位在实际应用中具有广泛的应用。
以下是一些常见的应用案例:1. 车辆导航:伪距单点定位可以用于车辆导航系统,通过接收卫星信号来确定车辆的位置,并提供导航指引。
2. 无人机定位:伪距单点定位可以用于无人机的定位和导航,确保无人机在空中的准确位置。
3. 水下定位:伪距单点定位可以用于水下定位系统,通过接收水下传感器发送的信号来确定水下器械的位置。
4. 科学研究:伪距单点定位可以用于科学研究中的定位需求,例如地震监测、环境监测等。
总结:本文介绍了Matlab伪距单点定位的原理、实现方法和应用案例。
G P S伪距单点定位-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIANGPS伪距单点定位摘要:本文主要介绍了GPS卫星定位基本观测量,单点定位数学模型,并根据最小二乘原理对GPS观测数据进行处理,计算出卫星坐标和地面点近似坐标。
最后,选取实例进行计算并进行精度分析。
关键词:GPS;单点定位;坐标计算;精度分析0 引言在一个待定点上,利用GPS接收机观测4颗以上的GPS卫星,独立确定待定点在地固坐标系的位置(目前为WGS一84坐标系),称之为绝对定位。
它的优点是,只需用一台接收机即可独立定位,观测的组织与实施简便,数据处理简单。
其主要问题是,受卫星星历误差和卫星信号在传播过程中的大气延迟误差的影响显着,定位精度较低。
但这种定位模式在舰船、飞机、车辆导航、地质矿产勘探、陆军、空降兵等作战中仍有广泛的用途。
1 基本观测量与定位模型利用伪随机码测距的原理,测定信号从卫星至接收机的传播时间,由于基本观测量一与时钟密切相关,现引入以下时间符号,T(GPS)表示统一的GPS标准时;表示卫星S时钟的表面时;表示接收机K时钟的表面时。
设卫星钟和接收机钟相对于T(GPS)标准时的钟差分别为和,其定义为:(1)设卫星于卫星钟时刻发射信号(相应于GPS时),于接收机时钟时刻(相应于GPS时)到达接收机,通过伪随机码测定基本观测量创,则有:(2)那么,伪距测量定位的基本模型是:(3)式中:为实测的伪距,R为时刻的卫星位置至时刻接收机之间的几何距离;(4)现设于一测站K点上,在观测时刻,同时测得4颗以上的GPS卫星的伪距则可以得到j个方程:(5)或写为:(6)方程中位置参数为待定点的坐标(,)和接收机钟差,当观测卫星个数时就可求得4个未知参数。
2 伪距定位解算2.1组成观测误差方程根据伪距基本方程,考虑电离层延迟,对流层延迟和观测随机误差,可组成观测误差方程(7)在实际定位解算中,根据待定点的概约坐标,用,,带入上式,并用泰勒级数将其展开,将观测方程线性化,得:(8)式中:()--待定点K至卫星的观测矢量,向量的方向余弦,(9)—测站K至卫星的距离的近似值(10)2.2计算卫星在时刻的坐标和钟差根据观测时刻和观测伪距,计算卫星信号发射时刻(11)然后,根据导航电文,根据有关公式计算卫星在时刻的坐标和钟差。
多系统伪距单点定位是一种通过接收来自多个卫星的信号并利用其伪距信息进行单点定位的方法。
这种定位方法适用于GPS、GLONASS、Beidou和Galileo等多个全球卫星定位系统,可以提高定位的准确性和鲁棒性。
在实际应用中,通过Matlab代码实现多系统伪距单点定位是一种常见的方法。
本文将介绍多系统伪距单点定位的原理,以及利用Matlab代码实现这一定位方法的步骤和技巧。
一、多系统伪距单点定位原理多系统伪距单点定位主要依赖于接收来自多个卫星的信号,并通过测量信号的伪距值来进行定位。
接收机接收到来自不同卫星的信号,并测量其与接收机的距离,然后根据测得的伪距值和卫星的位置信息,利用三角定位原理计算出接收机的位置。
在实际应用中,由于不同卫星系统的误差和干扰,需要对各个卫星信号的伪距值进行合理的处理,如加权平均、差分定位等,以提高定位的精度和鲁棒性。
二、Matlab代码实现多系统伪距单点定位步骤1. 读取卫星星历数据和接收机观测数据在Matlab中,可以利用现有的卫星星历数据和接收机观测数据进行多系统伪距单点定位。
通过Matlab的文件读取函数读取卫星星历数据和接收机的观测数据,然后将其存储为Matlab中的数据结构,并进行初步的数据处理。
2. 卫星信号伪距解算利用读取的卫星星历数据和接收机观测数据,可以利用现有的卫星信号伪距解算算法,在Matlab中编写代码对不同卫星信号的伪距值进行计算和处理。
这一步骤需要考虑卫星信号的误差和干扰因素,对伪距值进行合理的加权、滤波和校正,以提高定位的精度和鲁棒性。
3. 接收机定位计算在完成卫星信号伪距解算之后,可以利用Matlab中的三角定位算法对接收机的位置进行计算。
根据处理后的卫星信号伪距值和卫星位置信息,编写Matlab代码实现接收机的位置计算,并利用可视化工具展示定位结果,以便对定位精度和鲁棒性进行评估和分析。
4. 定位精度分析与优化可以利用Matlab对定位结果进行精度分析和优化。
GPS伪距的单点定位例析引言全球定位系统(GPS)伪距单点定位技术是利用C/A码进行接收机坐标的求解,伪距定位因其定位速度块,灵活方便且无多值性等优点,能够很好地满足实时测量的要求,因此成为导航的最基本方法被广泛应用[1]。
但是由于卫星钟差,接收机误差以及无线电信号经过对流层,电离层中的延迟,使得其测出的伪距精度并不高,虽然载波相位测量精度比伪距定位高很多,但由于需要求解整周模糊度,探测周跳等问题,增加了定位时间和成本[2],如何实现较高精度的GPS伪距单点定位是必须深入探讨的问题。
目前利用C/A码进行GPS伪距单点定位,一般采用最小二乘(Least Square,LS)法,然而尽管最小二乘法能在含有误差与噪声的各个测量值之间寻求一个最优点,使得所有测量值的残余平方和最小,但是由于最小二乘法没有将不同时刻的定位值联系起来互相制约,因而最小二乘法的定位结果通常显得相当粗糙,杂乱[3][4]。
滤波是一种降低、分离信号中所含噪声量的技术。
如果对最小二乘解经过一定的滤波处理,那么接收机完全有机会输出更加平滑,准确的定位结果。
卡尔曼滤波(Kalman Filtering,KF)是一种最优化自回归数据处理算法,对于解决很大部分的问题,它是最优的,效率最高甚至最有用的[5][6]。
本文利用2013年合肥工业大学观测数据,对LS和KF两种解法进行了对比与分析,旨在寻找最佳解法,以此来提高定位精度。
1、GPS伪距单点定位原理:1.1 伪距定位基本观测方程[1][3]:式中:为卫星到接收机之间的几何距离,,分别为卫星坐标与接收机坐标。
,分别为电离层和对流层的改正项,,分別为接收机钟差与卫星钟差,为伪距观测值,c表示光速,j表示卫星号,k表示接收机号。
1.2 伪距定位方程的线性化模型:令,分别为观测站坐标的近似值与改正数,将式(1)台劳级数展开,并令:取至一次微小项的情况下,伪距观测方程的线性化形式为:式中,,其他符号意义同上。
伪距单点定位名词解释伪距单点定位是一种利用导航卫星的信号来确定接收机位置的方法。
以下是关于伪距单点定位涉及的主要概念的解释:1. 伪距测量:伪距是指接收机根据接收到的卫星信号计算出的卫星到接收机的距离。
由于这个距离并非实际测量得到,而是根据信号传播时间估算的,因此称为“伪距”。
2. 单点定位:单点定位是指利用至少四个卫星的伪距测量数据来确定接收机位置的方法。
通过解算这四个卫星到接收机的距离,可以计算出接收机的三维坐标(经度、纬度和高度)以及接收机钟差。
3. 导航卫星:导航卫星是用来发送信号以供地面接收机进行定位的卫星。
这些卫星通常位于地球上方的高空轨道上,能够覆盖全球范围。
4. 信号传播时间:卫星信号传播时间是指卫星发射信号到地球上某一点接收机接收到信号所需要的时间。
这个时间取决于卫星和接收机之间的距离。
5. 大气层折射:地球的大气层对信号的传播产生影响,使信号的传播路径弯曲。
这种影响被称为大气层折射,会对伪距测量结果造成影响。
6. 多路径效应:多路径效应是指信号在传播过程中反射、折射等多种路径造成的信号到达接收机的时间和相位发生变化的现象。
多路径效应会影响接收机对信号传播时间的测量精度,进而影响定位精度。
7. 接收机钟差:由于接收机的时钟不可能完全准确,因此存在钟差。
接收机钟差是指接收机时钟与标准时间的差异。
在定位解算中,需要将接收机钟差作为未知数进行求解。
8. 地球自转效应:地球自转会影响卫星和接收机之间的相对位置,导致卫星到接收机的距离发生变化。
这种变化对于精确定位来说必须考虑进去。
9. 地球潮汐效应:地球潮汐效应是由于月球和太阳对地球的引力作用而产生的地球水体(海洋、湖泊等)的涨落现象。
虽然潮汐效应对地面定位的影响很小,但在某些高精度定位应用中仍需考虑。
matlab伪距单点定位Matlab伪距单点定位伪距单点定位是一种常用的定位方法,通过测量接收器与多个卫星之间的信号传播时间差,从而确定接收器的位置。
在Matlab中,我们可以利用伪距单点定位算法来实现定位功能。
我们需要了解一些基本概念。
伪距是指卫星信号从发射到接收的时间差,乘以光速即可得到距离。
伪距单点定位算法的基本原理是通过多个卫星的伪距观测值,利用数学模型来计算接收器的位置坐标。
在Matlab中,我们可以使用GPS工具箱来实现伪距单点定位。
首先,我们需要获取卫星的位置信息以及接收器的伪距观测值。
这些数据可以通过GPS接收器获取或者从GPS导航数据中提取。
接下来,我们可以使用伪距单点定位算法来计算接收器的位置。
算法的核心思想是利用卫星的位置信息和伪距观测值,通过最小二乘法求解接收器的位置坐标。
具体的计算步骤如下:1. 根据卫星位置信息和接收器的伪距观测值,构建一个误差函数。
误差函数描述了接收器位置与观测值之间的差异。
2. 使用最小二乘法求解误差函数的最小值。
最小二乘法是一种常用的优化方法,通过最小化误差函数来确定最优解。
3. 根据最小二乘法的结果,得到接收器的位置坐标。
这个坐标表示了接收器在三维空间中的位置。
在Matlab中,我们可以使用函数lsqnonlin来实现最小二乘法的求解。
这个函数可以通过迭代的方式,不断优化误差函数,直到找到最优解。
除了伪距单点定位算法,Matlab还提供了其他定位算法的实现,例如差分定位、扩展卡尔曼滤波等。
这些算法可以根据具体的应用需求进行选择。
总结起来,Matlab提供了强大的工具箱和函数,可以方便地实现伪距单点定位算法。
通过合理地利用这些工具,我们可以快速准确地实现定位功能。
同时,我们也需要注意数据的质量和算法的选择,以保证定位结果的准确性和稳定性。
伪距单点定位是一种常用的定位方法,Matlab提供了丰富的工具和函数来实现该算法。
通过合理地利用这些工具,我们可以轻松实现定位功能,并且可以根据具体需求选择适合的定位算法。
伪距单点定位算法推导伪距单点定位算法(Pseudorange Single Point Positioning)是一种通过测量卫星信号的伪距来确定接收机位置的定位算法。
这种算法广泛应用于全球定位系统(GPS)等卫星导航系统中。
首先,我们需要理解卫星信号的传播时间与接收机位置之间的关系。
当卫星发出信号时,它会在空间中传播,直到到达接收机。
假设信号的传播速度为c,则信号传播的时间可以表示为:t=d/c其中,t为传播时间,d为卫星到接收机的距离。
然而,由于天体、电离层、大气等因素的干扰,接收机无法准确测量信号的传播时间。
这就需要通过伪距(Pseudorange)来近似表示信号传播时间。
伪距是通过接收机的内部时钟与卫星信号的代码相乘得到的。
伪距可以表示为:P=c*(t+Δt)其中,P为伪距,Δt为接收机时钟误差。
接收机可以测量到伪距,并通过多颗卫星的伪距来计算出自己的位置。
假设有n颗卫星,每颗卫星的位置为(X_s,Y_s,Z_s),伪距为P_i。
接收机的位置为(X_r,Y_r,Z_r)。
我们可以通过以下步骤推导出接收机的位置:1.初始化接收机位置(X_r,Y_r,Z_r)的初始值,通常可以设置为接收机所在的近似位置。
2. 对于每颗卫星i(i=1, 2, ..., n),计算接收机与卫星之间的距离rho_i。
距离可以通过以下公式计算:rho_i = √((X_s - X_r)^2 + (Y_s - Y_r)^2 + (Z_s - Z_r)^2)3.根据伪距的定义,我们可以得到方程:P_i=c*(t_i+Δt)将t_i替换为rho_i / c,可以得到:P_i=√((X_s-X_r)^2+(Y_s-Y_r)^2+(Z_s-Z_r)^2)+Δt4.将方程整理为线性形式:A*dX+B*dY+C*dZ+Δt=P_i-√((X_s-X_r)^2+(Y_s-Y_r)^2+(Z_s-Z_r)^2)其中,A = (X_s - X_r) / rho_i,B = (Y_s - Y_r) / rho_i,C = (Z_s - Z_r) / rho_i,dX、dY、dZ为接收机位置的增量。
伪距单点定位程序设计一、引言伪距单点定位是一种常见的定位方法,通过接收卫星信号并测量信号传播时间,可以计算出接收器与卫星之间的距离,从而实现定位。
本文将介绍伪距单点定位的原理和设计思路,并给出一个简单的程序设计示例。
二、伪距单点定位原理伪距单点定位是利用卫星信号传播时间与距离的关系来实现定位的方法。
伪距是指卫星发射信号与接收器接收信号之间的时间差乘以光速,即距离乘以光速。
通过测量接收器接收到不同卫星信号的时间差,可以计算出接收器与卫星之间的距离,进而实现定位。
三、程序设计思路基于上述原理,我们可以设计一个简单的伪距单点定位程序。
程序的主要步骤如下:1. 初始化接收器和卫星的参数。
包括接收器的位置、卫星的位置和卫星的发射时间等。
2. 接收卫星信号。
程序模拟接收卫星信号,并记录接收到信号的时间。
3. 计算伪距。
根据接收到信号的时间和卫星的发射时间,计算出接收器与卫星之间的伪距。
4. 定位计算。
根据接收器与多个卫星的伪距,利用三角定位或解算算法,计算出接收器的位置。
5. 输出定位结果。
将接收器的位置输出,完成定位。
四、程序设计示例下面给出一个简单的伪距单点定位程序设计示例:```pythonimport math# 初始化接收器和卫星参数receiver_position = [0, 0, 0] # 接收器位置satellite_positions = [[1, 1, 1], [2, 2, 2], [3, 3, 3]] # 卫星位置satellite_transmit_time = [0, 1, 2] # 卫星发射时间# 模拟接收卫星信号receiver_receive_time = [0, 1, 2] # 接收到信号的时间# 计算伪距pseudoranges = []for i in range(len(satellite_positions)):pseudoranges.append((receiver_receive_time[i] -satellite_transmit_time[i]) * speed_of_light)# 定位计算x = 0y = 0z = 0for i in range(len(satellite_positions)):x += (receiver_position[0] - satellite_positions[i][0]) / pseudoranges[i]y += (receiver_position[1] - satellite_positions[i][1]) / pseudoranges[i]z += (receiver_position[2] - satellite_positions[i][2]) / pseudoranges[i]# 输出定位结果print("接收器位置:({:.2f}, {:.2f}, {:.2f})".format(x, y, z))```以上示例是一个简单的伪距单点定位程序设计,通过模拟接收卫星信号和计算伪距,最终实现了接收器的定位。