GPS伪距定位原理
- 格式:ppt
- 大小:998.00 KB
- 文档页数:26
伪距测距原理GPS接收机若要实现定位,必须解决如下两个问题:一是要知道各颗可见卫星在空间的准确位置,二是要测量从接收机到这些卫星的精确距离。
GPS接收机对每颗卫星产生伪距和载波相位两个基本距离测量值。
伪距测量值:伪距在GPS领域是一个非常重要的概念,它是GPS接收机对卫星信号的一个最基本的距离测量值。
通过测量GPS信号从GPS卫星到接收机的传输时间,再乘以信号的传播速度,可得到GPS卫星与接收机之间大概距离的测量值称为伪距。
核心是测量GPS卫星发射的测距码信号(C/A码或P码)到达用户接收机天线的电波传播时间τ。
为了测量上述传播时间,在用户GPS接收机里复制了与卫星发射的测距码(C/A码或P码)结构完全相同的码信号,通过接收机中的时间延迟器,使复制的测距码进行相移,使其在码元上与接收到的卫星发射的测距码对齐,即进行相关处理。
当相关系数为1时,接收到的卫星测距码与本地复制的测距码码元对齐。
为此,所需要的相移量就是卫星发射的码信号到达接收机天线的传播时间τ。
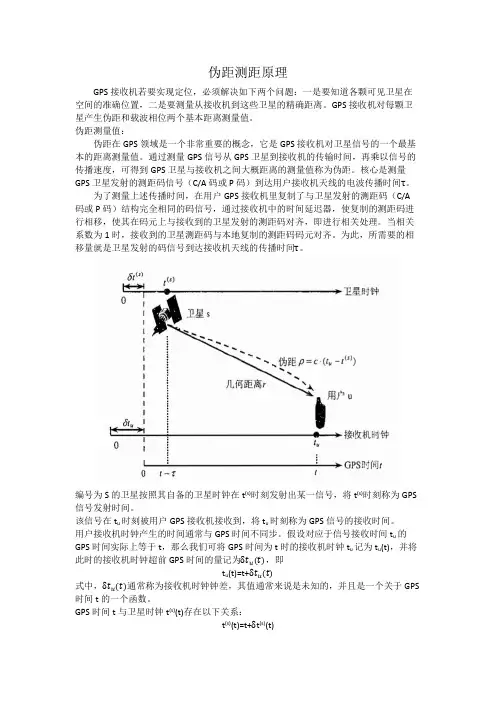
编号为S的卫星按照其自备的卫星时钟在t(s)时刻发射出某一信号,将t(s)时刻称为GPS 信号发射时间。
该信号在t u时刻被用户GPS接收机接收到,将t u时刻称为GPS信号的接收时间。
用户接收机时钟产生的时间通常与GPS时间不同步。
假设对应于信号接收时间t u的GPS 时间实际上等于t,那么我们可将GPS时间为t时的接收机时钟t u记为t u(t),并将此时的接收机时钟超前GPS时间的量记为δt u(t),即t u(t)=t+δt u(t)式中,δt u(t)通常称为接收机时钟钟差,其值通常来说是未知的,并且是一个关于GPS 时间t的一个函数。
GPS时间t与卫星时钟t(s)(t)存在以下关系:t(s)(t)=t+δt(s)(t)其中卫星时钟钟差δt(s)(t)可以视为已知的,根据此式GPS时间与卫星时钟在信号发射时刻(t-τ)时的关系可表达成t(s)(t-τ)=t-τ+δt(s)(t-τ)GPS接收机根据接收机时钟在t u(t)时刻对GPS信号进行采样,然后对采样信号进行处理,可得到标记在GPS信号上的发射时间t(s)(t-τ)。
伪距定位的基本原理
伪距定位技术是一种基于卫星信号的定位方法,主要使用在全球定位系统(GPS)中。
其原理是通过接收卫星信号并测量信号传输时间,从而得到接收器与卫星之间的距离差。
通过多个卫星的信号测量,可以计算出接收器的位置。
伪距定位技术的基本原理是利用卫星发射的信号,接收器接收到信号后记录下信号的到达时间。
因为信号传输时速度是已知的,通过记录到达时间,就可以计算出信号传播的距离。
而通过接收多颗卫星的信号并计算距离,就可以确定接收器的位置。
在伪距定位技术中,卫星发射的信号包含有精确的时间信息。
接收器通过接收这个信号,可以知道卫星在发送信号时的精确时间。
而当信号到达接收器时,接收器也可以记录下接收信号的时间。
通过计算信号传播时的时间差,就可以计算出信号传播的距离。
然而,在实际应用中,由于卫星与接收器之间的距离相差较远,信号传播的路径存在多种可能。
因此,要精确地计算信号的传播距离,需要考虑多种因素,如信号传播的时间、信号传播的路径、信号传播过程中遇到的障碍物等。
为了提高伪距定位的精度,需要使用更为复杂的算法,如差分GPS等。
总的来说,伪距定位技术是一种基于卫星信号的定位方法,其原理是通过接收卫星信号并测量信号传输时间,从而得到接收器与卫星
之间的距离差。
通过多个卫星的信号测量,可以计算出接收器的位置。
在实际应用中,为了提高精度,需要考虑多种因素,并使用更为复杂的算法。
伪距测量及定位原理伪距测量及定位原理是一种基于卫星信号的测距技术,可以用来确定接收器的位置。
这种技术是现代导航系统中最常用的定位技术之一。
伪距测量是通过测量卫星信号从发射到接收器的时间来计算距离,再结合卫星的位置信息,最终确定接收器的位置。
伪距测量的原理是基于卫星导航系统发射的信号在空间中传播的速度是已知的。
当卫星信号到达接收器时,可以通过测量信号从发射到接收器的时间来计算距离。
由于卫星的位置信息是已知的,通过多个卫星的信号测距,可以得到接收器相对于这些卫星的距离。
进一步,通过三个或以上的卫星信号测距,可以利用三边定位原理来确定接收器的位置。
伪距测量及定位原理的关键在于准确测量信号的传播时间。
接收器会接收到多个卫星的信号,每个信号都会有一个不同的传播时间。
为了准确测量传播时间,接收器需要和卫星进行时间同步。
卫星会通过导航信号发送时间信息,接收器通过接收这些信息来进行时间同步。
一旦接收器和卫星的时间同步完成,接收器就可以通过测量信号的传播时间来计算距离。
伪距测量及定位原理的精度受到多种因素的影响。
首先,信号的传播速度在大气中会发生变化,这会导致距离的测量误差。
其次,卫星的位置信息也会存在一定的误差。
此外,接收器本身的误差也会对定位精度产生影响。
为了提高定位的精度,可以使用差分定位技术,通过与参考站的信号进行比较,消除误差。
伪距测量及定位原理在现代导航系统中得到了广泛应用。
全球定位系统(GPS)就是一种基于伪距测量及定位原理的导航系统。
通过接收多颗卫星的信号,GPS可以实现准确的定位和导航。
除了导航系统,伪距测量及定位原理还可以应用于地震监测、航空航天等领域。
总结一下,伪距测量及定位原理是一种基于卫星信号的测距技术,通过测量信号的传播时间来计算距离,再结合卫星的位置信息,最终确定接收器的位置。
这种技术在现代导航系统中得到了广泛应用,提供了准确的定位和导航功能。
尽管伪距测量及定位原理存在一定的误差,但通过差分定位等技术,可以提高定位的精度。
GPS伪距单点定位⼀计算流程GPS单点定位的原理⽐较简单,主要就是空间距离的后⽅交会,⽤⼀台接收机同时接受四个或者以上卫星的信号得出卫星的位置坐标和卫星与接收机的距离,运⽤后⽅交会解算出接收机的三维坐标。
其中,接收机钟误差作为⼀个参数参与解算。
如果观测的卫星数⽬多于四颗,则采⽤最⼩⼆乘法进⾏平差求解。
1,读取数据包括读取O⽂件和N⽂件⾥的数据O⽂件⾥包括头⽂件和观测数据⽂件。
头⽂件⾥要读取出观测⽇期、接收机近似坐标,观测间隔,观测数据类型等。
观测数据⽂件包括观测时间,卫星数量,卫星质量标记,卫星的伪随机编号,之后分每个历元有对各颗卫星的观测数据,例如,P1、P2、L1、L2,要将这些数据读取出来。
N⽂件⾥包含的数据种类⽐较多,主要包括卫星的星历数据,通过这些数据可以求解出卫星的位置坐标。
数据包括卫星钟差参考时刻、卫星星历参考时刻,以及参考时刻升交点⾚径、参考时刻轨道倾⾓等好多参数信息。
2,计算卫星位置卫星计算位置⾥⾯采⽤模块函数的⽅式,可以直接调⽤。
在读取N⽂件中的数据之后,可以调⽤这些已经读出来的数据进⾏使⽤,函数提供两个形参,⼀个是星历数据的编号,另外⼀个是卫星信号发射时刻。
计算过程⽐较繁琐,⼀步⼀步的算就⾏。
3,交会定位计算⼀般每个历元的卫星数⽬不⽌四颗,通常采⽤最⼩⼆乘法进⾏平差求解。
公式为:V=AδX-L。
在具体计算的时候,⾸先要对(1)式进⾏线性化,得到矩阵A,L,这中间要⽤到很多矩阵的运算。
在求得卫星位置之后,要对O⽂件中每个历元⾥的卫星编号与N⽂件中的卫星编号进⾏匹配,如果匹配成功,再对时间进⾏匹配,如果时间差⼩于两个⼩时,那么该数据可以⽤于运算。
就这样,⼀个历元⾥匹配出的卫星数⽬超过4个的话,就可以通过平差计算出接收机的坐标了。
4,GPS时间的计算GPS时间的计算⽐较简单,计算出参考1980年1⽉6⽇0时0分0秒的不⾜⼀周的秒数。
主要在于判断所在的年是否为闰年,是否超过2⽉份,其他的问题就⽐较简单,采⽤⼀个Select Case的条件语句就可以了,函数最后得到不⾜⼀周的秒数就⾏。
GPS伪距定位原理解析GPS(Global Positioning System)全球卫星定位系统是一种基于卫星导航的定位和导航技术。
其核心是通过接收来自卫星的信号并计算信号的传播时间来确定接收器的位置。
而GPS伪距定位原理是GPS定位中最常用的一种方法。
一、信号传播时间计算GPS伪距定位原理的第一步是计算卫星信号传播的时间,也称为“伪距”。
接收器接收到来自至少4颗卫星的信号,并通过测量信号传播的时间来确定其与每颗卫星的距离。
伪距计算的基本原理是根据信号发送和接收之间的时间差来计算距离。
具体的计算方法是通过接收机和卫星的时钟进行时间同步,接收机记录下信号接收的时刻(T_r)以及卫星信号发送的时刻(T_s),然后计算两者之间的时间差Δt=T_r-T_s。
然而,接收机的时钟和卫星的时钟并不精确,存在一个时间偏差Δt_s,因此需要考虑纠正。
二、伪距的计算接下来,通过伪距的计算,可以找出接收机与卫星之间的距离。
由于速度为c的电磁波在传播过程中传播速度几乎不变,因此可以通过伪距的计算得到距离。
伪距(Pseudo-range)的定义是卫星到接收机之间的几何距离加上其他误差(如大气误差、多径效应等)。
伪距计算公式为:Pseudo-range = Speed of light * (T_r - T_s) + c*Δt_s三、卫星位置确定接下来的任务是确定卫星的位置。
GPS接收器通过多个卫星的信号来确定自身的位置。
但是,仅通过一个卫星的信号无法准确测量位置,至少需要4颗卫星的信号才能计算出准确的位置。
卫星的位置是由GPS导航系统的控制段计算得出的,导航系统中的主要组成部分是GPS的地面控制段。
此部分由一组地面站和控制中心组成,这些地面站通过GPS信号来监控卫星的位置和状态,并计算出它们的轨道参数。
通过接收到的卫星的信号,接收器可以从每颗卫星中获取关于卫星的信息,包括卫星的识别号、传播时间以及卫星的位置。
四、位置计算一旦卫星的位置确定,并且伪距计算完成,接收机就可以开始计算自身的位置了。
GPS导航定位原理以及定位解算算法全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
1地球坐标系简述要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ构成右手坐标系(即指向东经90度方向)。
地球大地坐标系的定义是:地球椭球的中心与地球质心重合,椭球的短轴与地球自转轴重合。
地球表面任意一点的大地纬度为过该点之椭球法线与椭球赤道面的夹角φ,经度为该点所在之椭球子午面与格林威治大地子午面之间的夹角λ,该点的高度h为该点沿椭球法线至椭球面的距离。
伪距定位算法伪距定位算法是一种常用的定位算法,通过测量卫星与接收器之间的信号传播时间差来确定接收器的位置。
本文将介绍伪距定位算法的原理、应用和优缺点。
一、原理伪距定位算法基于卫星导航系统,如全球定位系统(GPS),利用卫星发射的信号和接收器接收到的信号之间的时间差来计算距离。
具体步骤如下:1. 接收器接收到至少四颗卫星发射的信号,并记录下信号接收时间。
2. 接收器通过卫星发射信号的速度(光速)和接收时间计算出信号传播的时间。
3. 根据信号传播的时间和速度,计算出卫星与接收器之间的距离。
4. 通过至少三颗卫星的距离计算出接收器的粗略位置。
5. 通过更多卫星的距离测量,使用三角定位法来提高定位的精确度。
二、应用伪距定位算法广泛应用于定位和导航系统中,如汽车导航、航空导航、军事定位等。
以下是几个常见的应用场景:1. 汽车导航:伪距定位算法可以通过接收卫星信号,确定汽车的位置,并提供导航指引,帮助驾驶员准确找到目的地。
2. 航空导航:伪距定位算法在航空导航中起到关键作用。
飞机上的导航系统可以通过接收到的卫星信号,实时确定飞机的位置和航向,为飞行员提供准确的导航信息。
3. 军事定位:伪距定位算法在军事领域具有重要意义。
军事装备可以通过接收到的卫星信号,确定士兵或装备的位置,实现精确的定位和导航。
三、优缺点伪距定位算法有以下优点:1. 精度高:伪距定位算法可以通过接收多颗卫星的信号,使用三角定位法来提高定位的精确度。
在开放区域和有良好信号接收条件的情况下,定位精度可以达到几米甚至更高。
2. 全球覆盖:伪距定位算法依托于卫星导航系统,如GPS,可以在全球范围内提供定位服务。
只要能接收到足够数量的卫星信号,就可以进行定位。
3. 实时性强:伪距定位算法能够实时计算接收器的位置,及时提供定位信息。
在导航和军事等领域,实时性对于决策和行动至关重要。
然而,伪距定位算法也存在一些缺点:1. 受环境影响:伪距定位算法对信号的接收环境要求较高,如高层建筑、山地、森林等会对信号传播产生阻碍,影响定位精度。
差分GPS定位(DGPS)原理DGPS是克服SA的不利影响,提高GPS定位精度的有效手段,可达到厘米级及以上精度。
DGPS一般可分为区域DGPS、广域DGPS和全球DGPS,区域性基于基站的DGPS已经实现,全球DGPS正在酝酿中。
DGPS是英文Difference Global Positioning System的缩写,即差分全球定位系统,方法是在一个精确的已知位置上安装监测接收机,计算得到它能跟踪的每颗GPS卫星的距离误差。
该差值通常称为PRC(伪距离修正值),将此数据传送给用户接收机作误差修正,从而提高了定位精度。
随着GPS技术的发展和完善,应用领域的进一步开拓,人们越来越重视利用差分GPS技术来改善定位性能。
它使用一台GPS基准接收机和一台用户接收机,利用实时或事后处理技术,就可以使用户测量时消去公共的误差源电离层和对流层效应,并能将卫星钟误差和星历误差消除,因此,现在发展差分GPS技术就显得越来越重要。
GPS定位是利用一组卫星的伪距、星历、卫星发射时间等观测量来实现的,同时还必须知道用户钟差。
因此,要获得地面点的三维坐标,必须对4颗卫星进行测量。
在这一定位过程中,存在着三部分误差。
一部分是对每一个用户接收机所公有的,例如,卫星钟误差、星历误差、电离层误差、对流层误差等;第二部分为不能由用户测量或由校正模型来计算的传播延迟误差;第三部分为各用户接收机所固有的误差,例如内部噪声、通道延迟、多径效应等。
利用差分GPS定位技术(DGPS),除第三部分误差无法消除外,第一部分误差完全可以消除,第二部分误差大部分可以消除,其主要取决于基准接收机和用户接收机的距离。
差分GPS定位已将卫星钟误差和星历误差消除,并将电离层延迟和对流层延迟误差部分消除,定位精度大大提高。
所以,差分GPS定位技术(DGPS)在最近几年中得到了迅速发展和广泛应用。
根据差分GPS基准站发送的信息方式可将差分GPS定位技术(DGPS)分为三类,即:位置差分、伪距差分和相位差分。
伪距定位原理伪距定位是一种常用的定位方法,通过测量接收器与卫星之间的时间差来计算接收器的位置。
伪距定位原理是基于卫星导航系统的工作原理,如GPS系统,该系统通过卫星发射的信号与接收器接收到的信号之间的时间差来计算距离,并进一步确定接收器的位置。
伪距定位的原理基于两个基本假设:首先,卫星的位置是已知的,卫星系统会向接收器发送包含卫星位置和时间信息的信号。
其次,接收器能够准确地测量信号的到达时间差。
接收器会接收到卫星发射的信号,该信号包含有关卫星位置和时间信息的数据。
接收器将测量信号的到达时间差,并将其转换为距离,这个时间差称为伪距。
为了计算接收器的位置,至少需要四个卫星的信号。
通过测量四个卫星的伪距,可以得到四个方程,每个方程代表一个卫星。
这四个方程可以用来计算接收器的位置。
在计算接收器的位置时,需要考虑到误差因素。
例如,信号在传输过程中可能会受到大气条件的影响,导致信号传播速度的变化。
为了消除这些误差,需要使用额外的校正方法,如差分定位和精确伪距定位。
差分定位是通过将接收器与参考接收站进行比较,来减少误差影响。
参考接收站的位置已知,并且与接收器之间的距离可以通过测量得到。
通过将接收器与参考接收站之间的距离差异应用于接收器的伪距测量,可以消除大部分误差。
精确伪距定位是通过使用更先进的算法和技术来减少误差。
例如,通过考虑大气条件的影响,使用不同频率的信号来消除大气延迟误差。
此外,还可以使用其他测量数据,如载波相位测量和多路径误差校正,来提高定位的精度。
伪距定位原理在很多领域都有广泛应用。
除了卫星导航系统,它还可以用于车辆导航、航空导航、地震监测等领域。
通过准确测量接收器与信号源之间的时间差,可以实现精确的定位和导航。
伪距定位原理是一种基于测量接收器与卫星之间的时间差来计算位置的方法。
它通过利用卫星导航系统发射的信号,结合准确的时间测量,可以实现准确的定位和导航。
在实际应用中,还需要考虑误差因素,并采用适当的校正方法来提高定位的精度。
GPS伪距的单点定位例析引言全球定位系统(GPS)伪距单点定位技术是利用C/A码进行接收机坐标的求解,伪距定位因其定位速度块,灵活方便且无多值性等优点,能够很好地满足实时测量的要求,因此成为导航的最基本方法被广泛应用[1]。
但是由于卫星钟差,接收机误差以及无线电信号经过对流层,电离层中的延迟,使得其测出的伪距精度并不高,虽然载波相位测量精度比伪距定位高很多,但由于需要求解整周模糊度,探测周跳等问题,增加了定位时间和成本[2],如何实现较高精度的GPS伪距单点定位是必须深入探讨的问题。
目前利用C/A码进行GPS伪距单点定位,一般采用最小二乘(Least Square,LS)法,然而尽管最小二乘法能在含有误差与噪声的各个测量值之间寻求一个最优点,使得所有测量值的残余平方和最小,但是由于最小二乘法没有将不同时刻的定位值联系起来互相制约,因而最小二乘法的定位结果通常显得相当粗糙,杂乱[3][4]。
滤波是一种降低、分离信号中所含噪声量的技术。
如果对最小二乘解经过一定的滤波处理,那么接收机完全有机会输出更加平滑,准确的定位结果。
卡尔曼滤波(Kalman Filtering,KF)是一种最优化自回归数据处理算法,对于解决很大部分的问题,它是最优的,效率最高甚至最有用的[5][6]。
本文利用2013年合肥工业大学观测数据,对LS和KF两种解法进行了对比与分析,旨在寻找最佳解法,以此来提高定位精度。
1、GPS伪距单点定位原理:1.1 伪距定位基本观测方程[1][3]:式中:为卫星到接收机之间的几何距离,,分别为卫星坐标与接收机坐标。
,分别为电离层和对流层的改正项,,分別为接收机钟差与卫星钟差,为伪距观测值,c表示光速,j表示卫星号,k表示接收机号。
1.2 伪距定位方程的线性化模型:令,分别为观测站坐标的近似值与改正数,将式(1)台劳级数展开,并令:取至一次微小项的情况下,伪距观测方程的线性化形式为:式中,,其他符号意义同上。
GPS伪距定位原理GPS(Global Positioning System,全球定位系统)是由美国空军研制的一种全球导航卫星系统。
GPS伪距定位是GPS系统中最常用的定位方法之一1.GPS卫星发射信号:GPS系统由多颗卫星组成,每颗卫星都会以固定的频率(标称1575.42MHz)发送信号,信号包含卫星的时间信息、位置信息和其他相关信息。
2.接收机接收卫星信号:GPS接收机接收到来自至少4颗卫星的信号,并记录接收到信号的时间。
3.信号传播延迟校正:卫星信号在通过大气层时会受到延迟,这个延迟主要由电离层和对流层引起。
GPS接收机需要根据已知的模型对这些延迟进行校正,以准确测量信号传播的时间。
4.信号传播时间计算:接收机接收到卫星信号后,需要计算信号传播的时间。
这个时间包括从卫星发射信号到接收机接收信号的时间,以及信号传播过程中的延迟。
5.伪距计算:伪距是指接收机到卫星的距离。
由于接收机并不知道卫星的位置,因此无法直接测量距离。
为了得到伪距,接收机通过信号传播时间和光速的关系,计算出信号的传播距离。
6.位置计算:为了确定接收机的位置,至少需要4颗卫星的伪距数据。
通过最小二乘法或其他拟合算法,计算接收机的位置。
由于卫星的位置是已知的,接收机的位置可以通过计算得到。
7.误差校正:在计算接收机的位置时,还需要进行误差校正,包括钟差误差、大气延迟误差、多径效应等。
这些误差会对定位结果产生影响,需要进行相应的补偿。
8.定位结果显示:经过以上步骤,GPS接收机得到了接收机的位置。
这个位置可以以经度、纬度和海拔高度的形式显示。
综上所述,GPS伪距定位原理基于距离测量的原理,通过测量接收机与多颗卫星之间的距离来确定接收机的位置。
通过对信号传播延迟的校正、信号传播时间的计算、伪距的计算、位置的计算和误差的校正,最终可以得到接收机的准确位置。
这种伪距定位方法广泛应用于GPS导航系统、地理测量、车辆定位等领域。
伪距定位原理伪距定位是一种基于卫星导航系统的定位技术,通过测量接收机与卫星之间的信号传播时间,计算出接收机与卫星之间的距离,从而实现定位的方法。
它是全球定位系统(GPS)等卫星导航系统的核心原理之一。
伪距定位的原理是基于信号传播时间的测量。
卫星导航系统中的卫星发射信号,接收机接收到信号后,通过测量信号传播的时间差来计算距离。
具体的步骤包括以下几个方面:卫星导航系统中的卫星发射的信号是带有时间标记的,接收机接收到信号后可以获取到信号的发射时间。
接收机内部的时钟也会记录下接收信号的时间。
然后,接收机会根据信号传播的时间差来计算距离。
由于信号在空间中的传播速度是已知的,可以使用速度乘以时间的方法来计算距离。
即距离 = 速度× 时间差。
接下来,为了精确计算距离,需要考虑到信号传播过程中可能存在的误差。
其中最主要的误差是信号传播速度的不确定性。
由于信号在大气层中传播会受到大气折射的影响,导致信号传播速度发生变化。
为了补偿这个误差,接收机会使用传播速度的平均值来计算距离。
通过同时测量多颗卫星的信号传播时间差,可以计算出接收机与卫星之间的距离,并利用三角定位原理来确定接收机的位置。
通过测量多颗卫星的伪距,可以得到多个方程,通过解这些方程可以确定接收机的位置坐标。
伪距定位原理的关键在于准确测量信号传播的时间差。
为了提高定位的精度,还需要考虑到其他误差的影响,如卫星运动的误差、接收机钟差的误差、多路径效应等。
针对这些误差,可以采取差分定位、精密星历预报、多路径抑制等技术手段来进行校正和补偿,提高定位的准确度和可靠性。
总结一下,伪距定位原理是一种基于信号传播时间的定位方法,通过测量信号传播的时间差来计算距离,并利用多颗卫星的伪距来确定接收机的位置。
它是卫星导航系统的核心原理之一,广泛应用于航空、航海、车辆导航等领域。
通过不断的技术改进和创新,伪距定位技术的定位精度和可靠性将进一步提高,为人们的定位需求提供更好的解决方案。
伪距单点定位算法公式推导伪距单点定位算法是一种常用的定位方法,可以通过测量卫星信号的传播时间来计算接收机与卫星之间的距离,进而确定接收机的位置。
本文将从推导伪距单点定位算法的基本原理开始,逐步推导出最终的定位公式。
1. 基本原理伪距单点定位算法基于GPS(全球定位系统)的原理,利用卫星发射的信号在不同时间到达接收机,根据信号的传播时间差来计算接收机与卫星之间的距离。
假设接收机与卫星之间的距离为r,接收机的位置为(x,y,z),卫星的位置为(x_s, y_s, z_s),则有以下关系:r = sqrt((x - x_s)^2 + (y - y_s)^2 + (z - z_s)^2)2. 伪距的计算接收机接收到卫星发射的信号后,需要测量信号的传播时间。
假设接收机接收到第i颗卫星的信号的传播时间为t_i,其中i = 1,2,...,n,n为可见卫星的数量。
则有以下关系:r_i = c * (t_i - t_0)其中c为光速,t_0为接收机的钟差。
将上述关系代入前述的距离公式中,可以得到:(x - x_s)^2 + (y - y_s)^2 + (z - z_s)^2 = c^2 * (t_i - t_0)^23. 接收机的定位接下来,我们需要将接收机的位置参数(x,y,z)从上述方程中解出。
为了简化计算,我们可以将接收机的位置参数表示为一个向量p = [x, y, z],卫星的位置表示为一个矩阵S = [x_s, y_s, z_s]。
则有以下关系:(p - S)^T * (p - S) = c^2 * (t_i - t_0)^2将上述方程展开,可以得到:x^2 - 2x*x_s + x_s^2 + y^2 - 2y*y_s + y_s^2 + z^2 - 2z*z_s + z_s^2 = c^2 * (t_i - t_0)^2进一步整理,得到:x^2 + y^2 + z^2 - c^2 * (t_i - t_0)^2 = 2x*x_s - 2y*y_s + 2z*z_s - x_s^2 - y_s^2 - z_s^2将上述方程表示为矩阵形式,可以得到:A * p = b其中A为一个n×3的矩阵,每行对应一个卫星的位置坐标,p为接收机的位置向量,b为一个n×1的向量,每个元素为c^2 * (t_i - t_0)^2与2x_s, -2y_s, 2z_s的乘积之和。
相位平滑伪距一、相位平滑伪距是什么?相位平滑伪距(Phase Smoothing Pseudorange)是一种基于GPS信号相位的信号处理方法,可以提高GPS定位的精度和可靠性。
相位平滑伪距是通过对GPS接收机接收到的卫星信号的相位进行平滑处理,得到一种类似于伪距的数据,从而实现高精度的GPS定位。
二、相位平滑伪距的原理1. GPS信号传播原理GPS信号在空间中传播时会受到多种影响,包括大气延迟、电离层延迟、多径效应等。
这些影响会导致GPS信号传输时间发生变化,进而影响GPS定位精度。
2. 相位平滑处理为了减小这些误差对GPS定位精度的影响,可以使用相位平滑处理方法。
该方法利用接收机内部时钟与卫星发射时钟之间的差值来计算出接收机与卫星之间的距离,并将其转化为类似于伪距的数据。
这样就可以消除大气延迟、电离层延迟等误差对GPS定位精度的影响。
3. 相位观测值和伪距观测值的比较相位观测值和伪距观测值都可以用来计算接收机与卫星之间的距离。
但相位观测值的精度比伪距观测值更高,因为它具有更高的分辨率。
相位平滑处理方法可以将相位观测值转化为类似于伪距观测值的数据,从而提高GPS定位精度。
三、相位平滑伪距的优点1. 提高GPS定位精度相位平滑处理方法可以消除大气延迟、电离层延迟等误差对GPS定位精度的影响,从而提高GPS定位精度。
2. 提高GPS定位可靠性由于相位平滑处理方法具有更高的分辨率,因此可以提高GPS信号的抗干扰能力和鲁棒性,从而提高GPS定位可靠性。
3. 适用范围广相位平滑处理方法适用于各种类型的GPS接收机和卫星系统,包括L1、L2、L5等频段以及GLONASS、Galileo等卫星系统。
四、相位平滑伪距在实际应用中的问题及解决方法1. 周期性误差由于相位平滑处理方法采用的是差分计算,因此会产生周期性误差。
解决方法是通过多次计算取平均值来消除这种误差。
2. 长时间延迟相位平滑处理方法需要对信号进行积分,因此会产生长时间延迟。