动量算符及角动量算符的球坐标表示.pdf
- 格式:pdf
- 大小:3.17 MB
- 文档页数:8
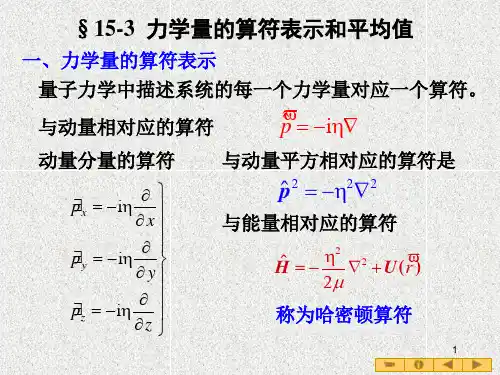
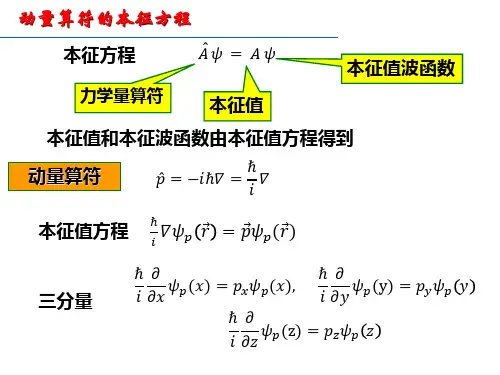


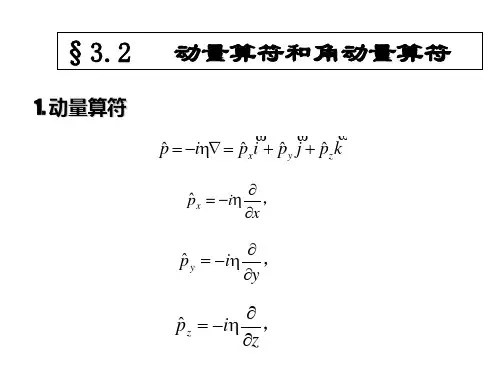


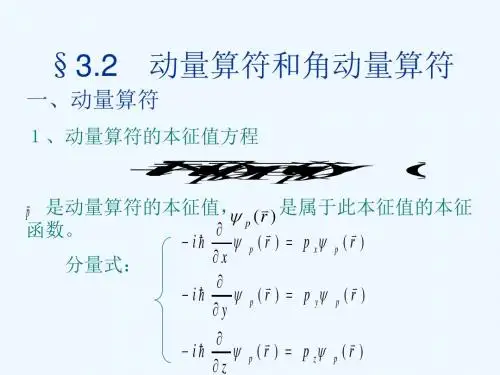
§3.2 动量算符和角动量算符一.动量算符。
1. 动量算符的本征值方程:()()r p r ip p ψψ=∇,三个分量方程是 (3.2.1) ()()r p r xi p x p ψψ=∂∂ , +∞<<∞-x ()()r p r yi p y p ψψ=∂∂ , +∞<<∞-y (3.2.2) ()()r p r zi p z p ψψ=∂∂ , +∞<<∞-z 通解是()r p i pCe r∙=ψ,C 是归一化常数。
(3.2.3) 2.动量本征函数的归一化。
()()()()()[]⎰⎰⎰⎰∞+∞-∞+∞-∞+∞-'-+'-+'-∙∞+∞-=dxdydze C d r r z p p y p p x p p ip pz z y y x x2τψψ因为()()x x x p p ip p dx ex x '-=⎰∞+∞-'-δπ2,所以有()()()()()()()()p p C p p p p p p C d r r z z y y x x p p'-='-'-'-=∙+∞∞-⎰δπδδδπτψψ323222如果取()232-= πC ,则()r pψ归一化为δ函数。
()()()()()r p i pp per p p d r r∙∙+∞∞-='-=⎰2321;πψδτψψ(3.2.4)(3.2.5)3.箱归一化在A (L/2,y,z )和A '(-L/2,y,z)点, ()r p i p Ce r∙=ψ的值应相同。
即⎪⎭⎫⎝⎛++⎪⎭⎫⎝⎛++-=z p y p L p i z p y p L p i z y x z y x CeCe2121()1=L p ix e所以πx xn L p 2=,x n 是正负整数或零。
,1,0,2±==x xx n Ln p π (3.2.6),1,0,2±==y yy n Ln p π (3.2.7),1,0,2±==z zz n Ln p π (3.2.8) 当L ∞→时,z y x p p p ,,的本征值就变为连续谱。
球坐标角动量算符
1、球坐标角动量算符
球坐标角动量是描述机构运动活动中的三维运动情况的一种特
殊算符。
它本质上是由一系列三元欧拉角的偏导数构成,它可以用来表示运动活动中机构的转速、旋转角速度和加速度。
以下是球坐标角动量算符:
(i)L = Jθ,其中L是机构的球坐标角动量,θ是机构的四元数形式的角动量,J是机构的质量转动惯量。
(ii)θdot = M^1(LLdot),其中θdot是机构的角动量偏导数,M是机构的质量转动惯量矩阵,Ldot是机构的球坐标角动量偏导数。
(iii)Ldot = J*ω,其中Ldot是机构的球坐标角动量偏导数,ω是机构的角速度,J是机构的质量转动惯量。
(iv)ωdot = M^1(Ldot-Lddot),其中ωdot是机构的角速度偏导数,M是机构的质量转动惯量矩阵,Lddot是机构的球坐标角动量二阶偏导数。
(v)Lddot = J*α,其中Lddot是机构的球坐标角动量二阶偏导数,α是机构的角加速度,J是机构的质量转动惯量。
球坐标角动量算符通常用来表示机构的旋转运动,可以帮助更好地理解机构的旋转状态,从而提高控制机构运动的能力。
- 1 -。
(以一维情况为例:注意算符的表示形式和矩阵元形式)∫∫+++∞∞−=−=−εεδδ00)()()()()(000x x x f dx x x x f dx x x x f ***()()()(),()(1)()n n n x x x x δδδδ′′−=−−=−***注意上两式中的积分符号 在坐标表象:坐标算符:x; 动量算符: i x ∂−∂=(微分形式) ()()'"ˆˆ|||||'"'()'")(x x x xx dx x x x x x dx x x x x x x x x x δδδ′′′′′′=<>=<><=−>=−−∫∫ ① (将方框内部分视为函数()f x ,利用*式)()'"ˆ()()"'"()"'x x p x i x x x x d x x x d i x d δδδ∂⎛⎞−−⎜⎟∂∫⎝⎠=−=−== ② (利用** 式) ()d i x d x x δ=′′′′−−=(利用*** 式)(同曾谨言书的结果)动量表象:坐标算符:x i p ∂∂=(微分形式) ; 动量算符: p ()()'"ˆ()'(()"')""p p d i p p p dpd x dp p p i p d p δδδ=−=−−−∫== ③ (利用**式) ()p p d i p d δ′′=−′′= (利用*** 式)(同曾谨言书的结果) ()()'"ˆˆ()'""("')p p pdp p p p p p p p p δδδ=−⋅−=−∫ ④ (将方框内部分视为函数()f x ,利用*式)()())'"("""(")(')ˆ(""'p p p p p p i p p p dp d i p dp d i p p dp L z y y z y z z y p p x −∂∂−∂∂−=−−−=∫δδδ===4.1.求在动量表象中角动量x L 的矩阵元和2x L 的矩阵元。