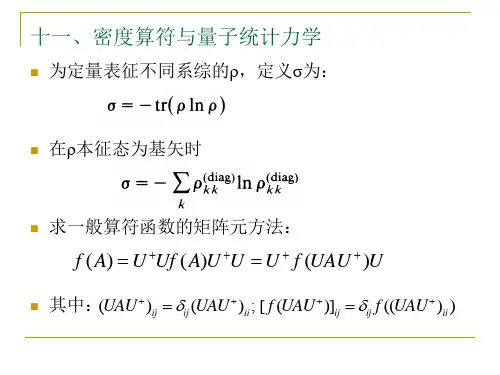
1.8-角动量算符的本征方程及其解
- 格式:pdf
- 大小:278.12 KB
- 文档页数:26

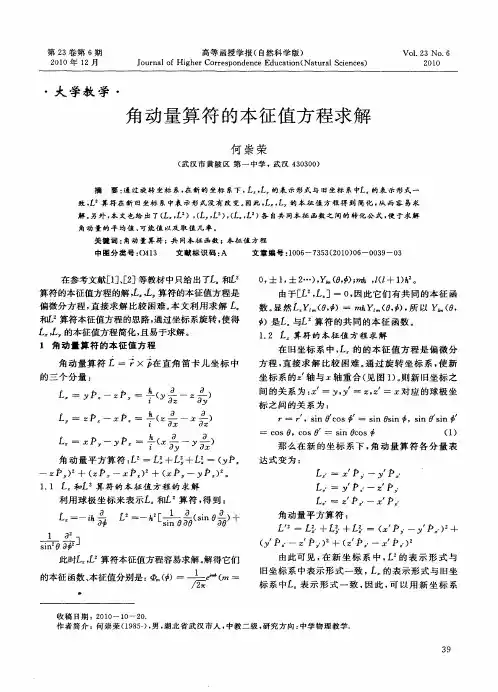
第09-11讲 角动量本征方程的解一、角动量和角总动量算符的回忆刚体转子的薛定谔方程ψψE H = 中IMH 2ˆ =2 因此方程即是ψψE IM=2ˆ2 (Ⅱ-1) 整理后得ψψψ22ˆ2ˆM IE M== (Ⅱ-2) 其中2222ˆˆ + ˆˆzy x M M M M +=且 ],[ˆy z z y i M x ∂∂-∂∂-= ][ˆzz z z i M y∂∂-∂∂-= , ][ˆx y y x i M z ∂∂-∂∂-= . 式(Ⅱ-2)也是角动量2M 的本征方程。
为了方便求解方程,采用球极坐标的形式,球坐标与直角坐标的变换关系φθcos sin r x = (r:0→∞) φθsin sin r y = (θ:0→π)θcos r z = (φ:0→2π) (Ⅱ—3)逆变换关系是222z y x r ++=222cos zy x z ++=θxy=ϕtan (Ⅱ—4) 于是有偏微商关系φθcos sin =∂∂xr φθsin sin =∂∂y r θcos =∂∂z rr x φθθcos cos =∂∂ r y φθθsin cos =∂∂ r z θθsin -=∂∂θφφsin sin r x =∂∂ θφφsin cos r y =∂∂ 0=∂∂z φ则得⎥⎦⎤⎢⎣⎡∂∂-∂∂-=y z zy i M x⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡∂∂∂∂+∂∂∂∂+∂∂∂∂-⎥⎦⎤⎢⎣⎡∂∂∂∂+∂∂∂∂+∂∂∂∂-=φφθθθφφθθφθy y r y r r z z r z r r i cos sin sin()()()]cos cot sin cos sin sin sin sin cos cos sin sin [22φφθθφθφθφθφφφθ∂∂-+∂∂--+∂∂--=r r r i ⎥⎦⎤⎢⎣⎡∂∂+∂∂-=φφθθφcos cot sin i同法得⎥⎦⎤⎢⎣⎡∂∂-∂∂-=φφθθφsin cot cos i M yφ∂∂-=i M z (Ⅱ---5) 222⎥⎦⎤⎢⎣⎡∂∂-∂∂-=y z z y i M x)( 22cos cot sin ⎥⎦⎤⎢⎣⎡∂∂+∂∂-=φφθθφ)( i⎥⎦⎤⎢⎣⎡∂∂+∂∂⎥⎦⎤⎢⎣⎡∂∂+∂∂-=φφθθφφφθθφcos cot sin cos cot sin 2 )cos cot cot cos sin cot sin cos cot cos cot cos sin sin 1cos sin (sin 2222222222222φφθφθφφθφθφφθθφθφθφφφθφφθφ∂∂+∂∂-∂∂∂+∂∂++∂∂∂+∂∂∂∂-=-222⎥⎦⎤⎢⎣⎡∂∂-∂∂-=z x x z i M y)( ⎥⎦⎤⎢⎣⎡∂∂-∂∂⎥⎦⎤⎢⎣⎡∂∂-∂∂-=⎥⎦⎤⎢⎣⎡∂∂-∂∂-=φφθθφφφθθφφφθθφsin cot cos sin cot cos sin cot cos 2222y M)sin cot cot cos sin cot sin cos cot sin cot cos sin sin sin 1cos (cos 2222222222222φφθθφθφφφθφφθθφθφθφφφφθφθφ∂∂+∂∂∂-∂∂+∂∂-+∂∂∂-∂∂+∂∂-=2222ˆˆ + ˆˆzy x M M M M += )cos cot cot cos sin cot sin cos cot cos cot cos sin sin 1cos sin (sin 2222222222222φφθφθφφθφθφφθθφθφθφφφθφφθφ∂∂+∂∂-∂∂∂+∂∂++∂∂∂+∂∂∂∂-=-)sin cot cot cos sin cot sin cos cot sin cot cos sin sin sin 1cos (cos 2222222222222φφθθφθφφφθφφθθφθφθφφφφθφθφ∂∂+∂∂∂-∂∂+∂∂++∂∂∂-∂∂+∂∂-222φ∂∂-)cot cot (22222222φφθθθθ∂∂+∂∂+∂∂+∂∂-=))1(cot cot (222222φθθθθ∂∂++∂∂+∂∂-= )sin 1cot (222222φθθθθ∂∂+∂∂+∂∂-= )sin 1sin sin 1(2222φθθθθθ∂∂+∂∂∂∂- ⎥⎦⎤⎢⎣⎡∂∂+∂∂∂∂-=22222sin 1sin sin 1φθθθθθ M (Ⅱ—6) 方程(Ⅱ—2)即为),(),(2),(sin 1sin sin 122222φθψφθψφθψφθθθθk IE ==⎥⎦⎤⎢⎣⎡∂∂+∂∂∂∂- (Ⅱ---7) 其中常数22 IEk =。
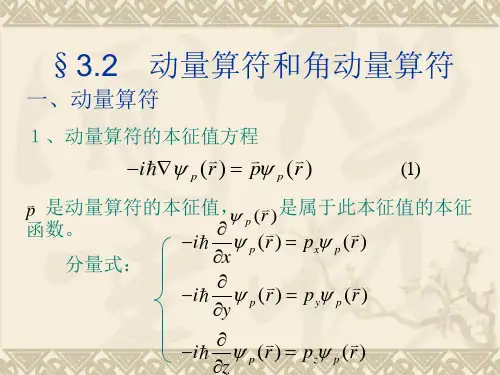


2.p pL ξ∧∧→→∧→和的本征值方程1、动量算符⑴动量算符的本征值。
p p p i p r p r i iψψ→→∧∧→→→→→⎛⎫⎛⎫=-∇=∇∴∇= ⎪ ⎪⎝⎭⎝⎭ 的本征方程为 其中,p →为p ∧→的本征值,p r ψ→→⎛⎫ ⎪⎝⎭是属于p →的本征态。
为求其本征态,可先求x p ∧的本征态,其本征值方程为()()()x y z 'p p p p p p i r r x c exp y z r cexp p r x x i p p x x i ψψψψψψ→→→→→→→→∂⎛⎫⎛⎫⎛⎫-== ⎪ ⎪ ⎪∂⎝⎭⎝⎭⎝⎭⎛⎫⎛⎫= ⎪ ⎪⎝⎭⎝⎭其解为:同理可得:,综合可得: 讨论:若粒子位置不受限制,则x p p p y z (,)可取一切实数值(,-∞+∞),它是连续变化的,上述本征态表示平面波,是不能归一化的。
⑵连续谱本征态是不能归一化的。
量子力学中最常见的几个力学量是:,,,r p L E →→→其中,r →和p →的取值(本征值)是连续变化的,L →的本征值是分立的。
而E 的本征值往往兼而有之。
将看到,连续谱的本征态是不能归一化的。
以p →本征态为例,一维粒子的本征值为p →的本征态为平面波:()()22,()0,ipxp p x ce p c x dx cdx ψψ+∞+∞-∞-∞=-∞<<+∞≠==∞⎰⎰显然只要这个结论的理解:因为()p x ψ描述的状态下,几率密度为常数2c (()2222ipx p x c ec ψ==)即粒子在空间各点的相对几率是相等的。
在().x x dx +内找到粒子的几率为()220p x dx c dx dx c ψ∝=∝≠只要在全空间找到粒子的几率必定是无穷大。
习惯上常取()x ip x p x e ψ=。
⑶δ函数为处理连续谱本征态“归一化”问题,引用狄拉克δ函数是很方便的。
一维δ函数定义为:()()()()()0,,a 0f 1x 1x ax a f x x a dx f a x a x d δδδ+∞-∞+∞-∞≠⎧-=-=⎨∞=⎩===⎰⎰以及:....⑴取,,得:即δ函数对全实数轴的积分等于1.利用傅里叶积分公式,可以将δ函数用具体形式表示出来:()()()()()()()()]()()()()()'''''''''....()......ikx ikxikx ikx ik x x f x g k e dk f x x g k f x edxf x f x e dx e dk f x e dk dx x f x x x δ+∞+∞-+∞+∞--∞-∞+∞+∞--∞-∞+∞-∞==⎡∴=⎢⎣⎡⎤=⎥⎦-⎰⎰⎰⎰⎰⎰⎰的傅氏变换为g 其逆变换为:⑵(f =dx )比较⑴和⑵得:()()''()11ik x x ikxx x edkx edkδδ+∞--∞+∞-∞-==⎰⎰或所以,若取动量本征态为()()()()()()''''exp exp xx xx p p x x p x x x x ip x x i x x dx p p x dx i x p p x d p p ψψψδ+∞+∞*-∞+∞-∞⎛⎫=⎪⎝⎭⎡⎤⎛⎫=- ⎪⎢⎥⎝⎭⎣⎦⎡⎤⎛⎫=-=- ⎪⎢⎥⎣⎦⎝⎭⎰⎰⎰ 则: 于是,平面波“归一化”就用δ函数的形式表示出来了。


角动量算符的本征值和本征函数角动量算符是量子力学中非常重要的一个概念,它描述了粒子的旋转运动。
而角动量算符的本征值和本征函数则是解决角动量问题的基础。
我们来了解一下角动量算符的定义。
在量子力学中,角动量算符是用来描述粒子围绕一个固定点旋转的运动的。
它是一个矢量算符,通常用符号$\hat{L}$表示。
角动量算符可以被分为轨道角动量算符和自旋角动量算符两种类型。
轨道角动量算符$\hat{L}$描述的是粒子在绕某个点旋转时的运动,而自旋角动量算符$\hat{S}$描述的是粒子自身固有的旋转运动。
接下来,我们来了解一下角动量算符的本征值和本征函数。
本征值和本征函数是解决角动量问题的基础。
本征值是指在某个特定的状态下,测量角动量算符所得到的结果。
而本征函数则是指在这个状态下,角动量算符作用于某个量子态所得到的结果。
对于轨道角动量算符$\hat{L}$来说,它的本征值为$L(L+1)\hbar^2$,其中$L$为量子数,$\hbar$为普朗克常数除以$2\pi$。
轨道角动量算符的本征函数是球谐函数,它们描述的是粒子在三维空间中的运动。
对于自旋角动量算符$\hat{S}$来说,它的本征值为$s(s+1)\hbar^2$,其中$s$为自旋量子数。
自旋角动量算符的本征函数是自旋函数,它们描述的是粒子自身固有的旋转运动。
在物理学中,我们经常需要计算多个角动量算符的本征值和本征函数。
这时候,我们可以使用CG系数来计算。
CG系数是一组复数系数,它们描述的是两个角动量算符的本征函数之间的关系。
角动量算符的本征值和本征函数是解决角动量问题的基础。
我们可以使用它们来计算粒子的旋转运动,以及多个角动量算符之间的关系。
在量子力学中,角动量算符的本征值和本征函数是非常重要的概念,对于我们理解粒子的旋转运动和量子力学的基础理论都有着重要的作用。
角动量算符的本征值方程在量子力学中,我们知道,角动量算符x L ∧,y L ∧,z L ∧满足本征值方程:()()(),1,1,,,x lm l m l m L Y ∧+-=+θφθφθφ, (1)()()(),1,1,, ,y lm l m l m L Y ∧+-=+θφθφθφ,(2)()(),,z lm lm L Y mY ∧=θφθφ. (3)或取ˆˆˆx yL L iL ±=±,则()()1ˆ,,lmlm L Y ±±θϕ=θϕ, (4)而()()()2ˆ,1,lm lmL Y l l Y θϕ=+θϕ 这一节, 我们将从SO(3)群的不可约表示出发,来导出这些关系. 由§5.3节(7)式知()()()()''1212ˆ(),, (,, 1, , )ll lm m mlm m lP R f D R f m m l l l '=-='=--+∑ ξξξξ, (5)其中()12,lm f ξξ取形式()12,l m l mlm f +-ξξ=其性质与球谐函数()φθ,lm Y 相同,这里不妨将其取作球谐函数,这样(5)式变为:()()'ˆ()(,)(,)ll lmlm m m m lP R Y D R Y ''=-=∑θφθφ (6)首先考虑绕x 轴转角为0∆η→的变换,在该变换下,若不考虑自旋角动量,则函数变换算符()0ˆˆˆ1xi L xxP R e i L ∆η→-∆η=-∆η (7)由于绕x 轴转动η∆角,可视为欧勒角为2πα-=,ηβ∆=,2πγ=的转动,这样由§5.4节(2)式知:()()()()()()()()()∑+='+-'-'--+'-'+-+-=⎪⎭⎫ ⎝⎛∆-m l k kl m m k m m k m l k m l k m l m l m l m l D 0!!!!!!!!12,,2πηπ ()m m ikm m km m l e-'+-'-'-+⎪⎭⎫ ⎝⎛∆-⎪⎭⎫⎝⎛∆22222sin 2cos πηη亦即()()()()0221 2l mk l m m x k m m kim m D R e+'='-+π'-∆η→-⨯∆η⎛⎫- ⎪⎝⎭∑ (8)在0→∆η时,展开式只保留η∆的零级与一级项, 则有:20m m k '-+= 或 21m m k '-+=. (9)(1) 当02=+-'k m m ,亦即2m m k '-=-时,由于 0≥-=+-'k k m m (阶乘要求),故0=k 或m m =', 而()()1lmm x D R = (10)(2)当+21m m k '-=, 或12+-=-'k m m 时,由于01≥+-=+-'k k m m (阶乘要求),且0≥k ,故0, 1k =.当0=k 时, 1=-'m m ,或1+='m m ,则由(8)式知:()()1!2)2l m m x i D R i +∆η⎫=-⎪⎝⎭∆η- (11)当1=k 时,1-=-'m m ,即1-='m m ,则由(8)式得()()1!2 )2l m m x D R i i -∆η⎫=⎪⎝⎭∆η=-(12)将(7)、(10)、(11)及(12)式代入(6)式得()()11ˆ(1),,)(,)2(,)]x lm lm lm lm i i L Y Y +-∆η-∆ηθϕ=θϕ-θφ+θφ由此得()()(),1,1ˆ,,,x lml m l m L Y +-θϕ=θϕ+θϕ (13)与(1)式完全一致.再考虑饶y 轴转角为0→∆η的变换,在该变换下,若不考虑自旋角动量,则函数变换算符为:()0ˆˆˆ1y i L y yP R e i L ∆η→-∆η=-∆η (14)该转动的三个欧勒角分别为0=α,ηβ∆=,0=γ,将其代入§5.4节(2)式得()()()=02220,,01 cos sin 22l mkl m m k l m m km m kD +'''+---+∆η=-∆η∆η⎛⎫⎛⎫- ⎪⎪⎝⎭⎝⎭∑ 在0→∆η时,()()()()()()()()()()∑+-''⎪⎭⎫ ⎝⎛∆-+-'-'--+'-'+-+-=∆k k m m kl m m k m m k m l k m l k m l m l m l m l D 22!!!!!!!!10,,0ηη (15)在展开式中,只保留η∆的零级与一级项,则有20m m k '-+= 或 21m m k '-+=.(1) 当02=+-'k m m ,亦即2m m k '-=-时,由于0≥-=+-'k k m m (阶乘要求),且0≥k ,故0=k 或m m =',则()() 1.lmm y D R = (16)(2)当12=-'+m m k ,或12+-=-'k m m 时,由于01≥+-=+-'k k m m (阶乘要求),且0≥k ,故10==k k 或.当0=k 时, 1+='m m ,与上面同样的讨论知()1()2l m my DR +∆η⎫=-⎪⎭(17)当1=k 时,1-='m m . 与上面同样的讨论知()1()l m m y D R -=(18)将(14)、(16)、(17)及(18)式代入(6)式得()()(),1,1ˆ,,,y lml m l m L Y +-θϕ=θϕ+θϕ (19)与(2)式一致.最后考虑饶z 轴转角为0→∆η的变换,在该变换下,若不考虑自旋角动量,则函数变换算符为:()0ˆˆˆ1zi L z z P R ei L ∆η→-∆η=-∆η .(20)该转动的三个欧勒角分别为0=α,0=β,ηγ∆=. 将其代入§5.4节(2)式得()()()20,0,1.kl m m k im m m kD e '-+-∆η'∆η=-∑要使上式不等于零,02=+-'k m m ,亦即2m m k '-=-. 另外,0≥-=+-'k k m m (阶乘要求),且0≥k ,故0=k 或m m ='.又0→∆η时,ηη∆-≈∆-im e im 1,因此()()1lmm z D R im =-∆η. (21)将(20)与(21)式代入(6)式得()()φθφθ,,ˆ,ml lm z mY Y L = (22)与(3)式一致.这样,由SO (3)群的不可约表示,ˆˆˆx y zL L L 、及的本征值方程很自然地得到.由(7)、(14)与(20)式知,绕单位矢量n、转角为0∆η→的无穷小转动算符为:()ˆ,1n P R i n L ∆η=-∆η⋅ (23)令m αη=∆,其中m 为一无限大的整数,α为一有限量,则ˆ,1n i n L P R m m αα⋅⎛⎫=- ⎪⎝⎭对于有限转角为α的转动,可以看成是转角为mαη=∆的m 次连续转动而成,所以()()ˆˆ,lim ,lim 1exp mm n n m m i n L P R P R i n L m m →∞→∞⎛⎫αα⋅⎛⎫α==-=-α⋅ ⎪ ⎪⎝⎭⎝⎭ . (24)这就是沿任意方向n 转角为α的转动算符,若假设n的角坐标为()φθ,,则()31231ˆˆˆˆsin cos sin sin cos i i i n L L L L L =α⋅=αθϕ+θϕ+θ=α∑其中φθααcos sin 1=,φθααsin sin 2=,θααcos 3=. (25)这样()()31ˆˆ,exp exp n i i i P R i n L i L =⎛⎫α=-α⋅=-α⎪⎝⎭∑ (26)由此可见,(25)式定义的321,,ααα为正则参数,这一点与三个欧拉角γβα,,是不同的,我们知道γβα,,不是正则参数.§5.7 SO(3)群表示直积的分解SO(3)群的两个不可约表示的直积仍然是SO(3)群的表示. 由§2.9节的讨论知,两个不可约表示的直积一般不再是可约的,它们可按克莱布什-戈登分解方式展开为一系列不可约表示的直和,即()()12()()()()lll l lD R D R a D R ⊕⊗=∑ (1)其中l α为不可约表示()()l D R 出现的次数,下面我们就来确定这种分解形式.1. SO(3)群表示的特征标在讨论SO(3)群表示的特征标之前,我们首先来证明下面的结论:绕通过同一点的任意转轴转动相同角度的操作属于同一类.证:设()αζR 代表绕过o 点的ζo 轴、转角为α的转动,如图1示.图1为简单起见,设ζo 轴在yoz 平面上,上述转动可通过下述步骤进行:(1) 绕ox 轴转-θ角,故ζo 与oz 轴重合,记该转动为()1()x x R R --θ=θ.(2) 绕oz 轴转α角,记该转动为()αz R .(3) 再将ζo 绕x 轴转θ角回到原处,该转动为()x R θ.这样()()()()1x z x R R R R -ζα=θαθ (2)根据类的定义,上式中()αζR 与()αz R 属同一类,由于这里z 轴的选取是任意的,因此我们得到结论:绕通过同一点的任意转轴转动相同角度的操作属于同一类. 所以它们具有相同的特征标. 这样,只要我们知道通过原点o 某一转轴转动某一角度不可约表示的特征标,也就知道了绕通过任意转轴转动相同角度的不可约表示的特征标.由§5.3节(10)式我们知道,绕z 轴转动φ角的不可约表示为:()()0,0,l im m m m m D e -φ''φ=δ (3)这样由上面的讨论知,SU (2)群的绕通过原点o 任意轴转过φ角的不可约表示的特征标为:()21201 1i l llim il ik il l i m l k e k l m e e e e e +φ-φ-φφ-φφ=-=-=-χ==-∑∑1122221sin 2sin 2i l i l ii l ee ee⎛⎫⎛⎫-+φ+φ ⎪ ⎪⎝⎭⎝⎭φφ-⎛⎫+φ ⎪-⎝⎭==φ- 2. SO(3)群表示的直积的分解为了求得(1)式中直积分解的系数,我们来求表示的直积()()12()()llD R D R ⊗的特征标.12121212121122()()()()()() ()() l l l l l l l l im im m l m l D R D R D R D R ee -φ-φ=-=-⎡⎤χ=χ⊗⎣⎦⎡⎤⎡⎤=χχ⎣⎦⎣⎦=χχ=∑∑()1212122maxmin 12 l l i m m m l m l l lim l l m lem m m e -+φ=-=--φ==-==+∑∑∑∑其中21min l l l -= 21max l l l +=,而lim l m le -φ=-χ=∑故121212()()()()l l l l ll l l D R D R +=-⎡⎤χ⊗=χ⎣⎦∑而由(1)式知:12()()()()l l l l lD R D R a ⎡⎤χ⊗=χ⎣⎦∑比较以上两式知,1=l a , 当 121212, 1, , l l l l l l l =++-- ,0=l a , 其它情况.这个结果表明,在表示的直积()()12()()l l D R D R ⊗中,不可约表示()()l D R (121212, 1, , l l l l l l l =++-- )仅出现一次,即表示的直积有如下分解()()()()121212121()()()()()lll l l l l lD R D R D R D R D R ++--⊗=⊕⊕⊕亦即()()()121212()()(). (4)l l l l ll l l D R D R D R +⊕=+⊗=∑如131()()()(1)222()()()()D R D R D R D R ⊗=⊕.()()()()()12321()()()()()D R D R D R D R D R ⊗=⊕⊕.§5.8 角动量的耦合与C-G 函数角动量的耦合是物理学中的一个重要问题,本节将利用前面得到的转动群的不可约表示来讨论角动量的耦合, 求得耦合系数,即C-G 系数.由前面的讨论我们可以看出,球谐函数()φθ,lm Y 按SO(3)群的不可约表示()()lD R 变换,在一般情况下,考虑到变量r ,函数()()(),l m l l mr R r Y ψ=θφ也应按SO(3)群的不可约表示()()lD R 变换,亦即()()()()()ˆjjjmm m jm m jP R r D R r '''=-ψ=ψ∑(1)其中, , 1, , m m j j j '=--+ 共12+j 个取值. 这里按习惯将角动量量子数用符号j 表示,这里的()jm r ψ是2ˆj 与z j ˆ的本征函数,即()()()()()2ˆ1ˆjm jm z jm jm j r j j r j r m r ⎧ψ=+ψ⎪⎨ψ=ψ⎪⎩ (2)考虑两个粒子系统,如核外的两个电子,每个电子均在各向同性的中心场中运动,其波函数分别为()111j m r ψ与()222j m r ψ,它们分别按SO(3)群的不可约表示()()l D R 变换,即()()()()()()111111111111111ˆj j j m j m m m j m m j r P R r D R r '''=-'ψ=ψ=ψ∑(3)其中 11111, , 1, , m m j j j '=--+ .()()()()()()222222222222222ˆj jj m j m m m j m m j r P R r D R r '''=-'ψ=ψ=ψ∑(4)其中22222, , 1, , m m j j j '=--+ .而()()()()()111111112111111111ˆ1ˆj m j m z j m j m j r j j r j r m r ⎧ψ=+ψ⎪⎨ψ=ψ⎪⎩,()()()()()222222222222222222ˆ1ˆj m j m z j m j m j r j j r j r m r ⎧ψ=+ψ⎪⎨ψ=ψ⎪⎩.两个电子组成的耦合系统的波函数为:()()()11221122, 1212,j m j m j m j m r r r r ψ=ψψ (5)在()3SO R ∈的转动变换下,有()()()()()()()()()()11221122121111222212, 121212ˆ, j m j m j m j m j j m m j m m m j m m m P R r r r r D R r D R r ''''''ψ''=ψψ=ψψ∑∑()()()()()()12112222122212, j j j m j m m m m m m m D R D R r r ''''''⎡⎤=⊗ψψ⎣⎦∑ (6)因此,耦合系统的波函数1122, 12(, )j m j m r r ψ按SO(3)群表示的直积()()12()()jjD R D R ⊗变换,而由§5.7节的讨论知,直积()()12()()jjD R D R ⊗是可约的,因此1122, 12(, )j m j m r r ψ不是按SO(3)群的不可约表示变换,因此1122, 12(, )j m j m r r ψ不是总角动量2ˆj 与z j ˆ的本征函数.下面我们来讨论一下,如何由()111j m r ψ与()222j m r ψ来构成总角动量2ˆj 与z j ˆ的本征函数.由§5.7节(4)式知,表示的直积可约化成准对角矩阵,121212()(1)()()()()()j j j j j j D R D R N R D R --+-⎛⎫⎪ ⎪= ⎪⎪⎪⎝⎭ 1020(7)其中10与20代表零矩阵元. 这样()()()121212, =, 1, j j m jm j j m m N R D R j j j j j j j j ''''=δ'--++ , (8)这表明存在矩阵C ,使得()()()()()C R N C R D R D j j 121-=⊗ (9)因为()R N 与()()()()R D R D j j 21⊗都是幺正的,所以C 应为幺正矩阵,即+C C -=. 而(9)式的矩阵元可以写成:()()()()()()()1211221,2121212, , , jjm m m m j jj jm m j m j m jm jm m m m m j jD R D R C N R C ''+''''''''=∑∑()()()12121222*(), , (8)j j j j j jm m m m m jm m m m mjC D R C '''''∑∑式 (10)这里的()1212, j j jm m m C 是jm 行,21m m 列矩阵,其中121212, 1, , j j j j j j j =--++ ,1111, 1, , m j j j =--+ ,2222, 1, , m j j j =--+ .利用变换矩阵C 可将()()121221++j j 个线性无关的波函数1122, 12(, )j m j m r r ψ线性组合成另一组()()121221++j j 个线性无关的函数:()121211221212,,12(, )(, )j jjm m m jmj m j m m m r r C r r +ψ=ψ∑ (11)利用C 变换矩阵的幺正性,即()()121212121122+,,j jj jm m jm jm m m m m m m jmC C ''''=δδ∑可得(11)式的逆变换为:()12112212,12, 12(, )(, )j jj m j m jm m m jm jmr r C r r ψ=ψ∑ (12)不难证明由(11)式表示的函数12(, )jm r r ψ按SO(3)群的不可约表示()()jD R 变换,因为()()()121211221212,, 12ˆ(, )ˆ (, )jm j jm m jm j m j m m m P R r r C P R r r +ψ=ψ∑()()()()()121212112212121212, , 12, , (6)(, )j j j j m m jm j m j m m m m m m m m m C D R D R r r +''''''⎡⎤⊗ψ⎣⎦∑式()()()()()()121212121212121212,, ,, 12 (12)(, )j j j j m m jmm m m m j m m m m m j jj m m m j m C D R D R C r r +''''''''''''⎡⎤⊗⨯⎣⎦ψ∑∑式()()()(){}1212, (, )j j j m j m jmj m C D R D R C r r +''''''⎡⎤=⊗ψ⎣⎦∑()12()12 (9)(, )(8) ()(, )j m jmj m j m j m m jm m NR r r D R r r '''''''''ψψ∑∑式式 可见12(, )jm r r ψ按不可约表示()()R D j 变换,因此按(11)式组合得到的12(, )jm r r ψ是总角动量2ˆj 与z j ˆ的本征函数.(11)式中由1122, 12(, )j m j m r r ψ到12( )jm r r ψ的变换系数()1212, j j m m jmC +称为克莱布什-戈登(Clibushi-Gordan)系数或维格纳(Wigner)系数或矢量耦合系数,简称为C-G 函数,通常取该系数为实数,所以()12121212(), ,1122==j j j j m m jm jm m m C C j m j m jm + (13)下面我们来求C-G 系数的具体形式.设z R 为绕z 轴转角为α的旋转,由§5.3节(10)式知()()αδim m m m m z j e R D -''= (14)用()zR P ˆ作用于(11)两端,得()()()121211221212, , 12ˆˆ(, )(, )j j z jm m m jm z j m j m m m P R r r C P R r r +ψ=ψ∑ (15)由于()()()121212ˆ(, )(, ) (14) (, )j z jm m m z jm m im jm P R r r D R r r e r r '''-αψ=ψψ∑式又由(6)式知:()()()()()()1122121122221222, 1212, ˆ()(, ) z j m j m j j z z j m j m m m m m m m P R r r D R D R r r ''''''ψ⎡⎤=⊗ψψ⎣⎦∑ 而121212121122121122()()()(), ()[()()]()() (14)j j j j z z m m m m m m z m m z i m m m m m m D R D R D R D R e ''''-+α''⊗=δδ式这样1211221122(), 12, 12ˆ()(, )=(, )i m m z j m j m j m j m P R r r e r r -+αψψ 故(15)式变为()()12121211221212,12(, )(, )j ji m m im jm m m jm j m j m m m e r r C er r +-+α-αψ=ψ∑ (16)再利用(11)式得()121211221212,, 12(, )=(, )j jim im jm m m jm j m j m m m e r r e C r r +-α-αψψ∑由于1122,12(, )j m j m r r ψ线性无关,所以21m m m +=. (17)这样()()2121212121,,,m m m j j m m j j j m m jm C C +=δ(18)将其代人(10)式,得()()()()()()()1212121211221212121212(),,,j j j j j jj jj m m m m j m m m m m m j m m j j j D R D R C D R C +''''''++=-=∑ (19)由§4.4节(10)式知:两不可约表示的矩阵元满足正交性()()()()()121122*,,,,,jjm m m m GD D W d d d ''αβγαβγαβγαβγ=⎰1212121(,,)m m m m j j j W d d d l ''αβγαβγδδδ⎰(20)三个欧勒角的变化范围分别为:0()2, 0.≤αγ≤π≤β≤π 权重因子(,,)sin W αβγ=β,所以2(,,)8W d d d αβγαβγ=π⎰(21)1j l 为表示的维数,对于表示()()R D j 1,1211+=j l j .用()1212*(),j m m m m D R ''++乘(19)式两边并对欧勒角加权积分,利用正交关系(20)得()()()()()1211221212*(),21,,,,,,sin 8j j j m m m m m m m m D D D d d d ''''++αβγαβγαβγβαβγπ⎰ ()()12121212, , 121j j j j j m m j m m C C j ''=+ (22)为了确定()1212, j j j m m C ,在上式中令11j m =',22j m -=',并由§5.4节(2)(3)与(4)式知:1212121212121212*(),12121212222[()()](,,)(1)11(cos )(sin ) 22j j j m m kkj m m j j k j j m m k i j j m m D e -+++-+----+-α++γαβγ=-⨯β-β∑(22)()111111111()(,,)11 (cos )(sin )22j j m i j m m j j m De -α+γ+-αβγ=β-β (24)()()22222222222()(,,)111 (cos )(sin )22j m j j m i j m j m j m D e+---α+γ-+αβγ=-β-β (25)将(23)(24)(25)三式代人(22)式并注意()()()112211, 11j m k--=-=,得:()()()()()()()()()()1212121212122111122222!2!!!!!18!!!!j j j m m j m m j j j j j j j m j m j m j m ⎡⎤++--+--+⨯⎢⎥π+-+-⎣⎦()()()()221212121211!!!!k j m Rk j m m k j j j k j j m m k ++-⨯++--+----+∑211122+2222211(cos )(sin )sin 22j j m k j m kd d d +--+βββαβγ⎰ ()()12121212, , 121j j j j j j j j m m C C j -=+ (26)利用积分()222111!!(cos )(sin )sin 8221!a b a b d d d a b βββαβγ=π++⎰ 则()()()211122222222211112111cos sin sin 822+!!1!j j m k j m kd d d j j m k j m k j j j ++--+⎛⎫⎛⎫βββαβγ⎪ ⎪π⎝⎭⎝⎭+--+=+++⎰代入(26)式得:()()()()()()()()()()()1212121212121211112222211!2!2!!!!!!!!!j j j j j j j m m j m m j j j j j j j m j m j m j m +⨯+++⎡⎤++--+--+⨯⎢⎥+-+-⎣⎦()()()()()()22211112121212!!1!!!!k j m kj j m k j m k k j m m k j j j k j j m m k ++++--+-++--+----+∑()()12121212, , j jj jj j j j m m C C -= (27)在上式中再令11j m =,22j m -=,得:()()()()()()()()()()12112212121212121221!1!!! 1!!!j j j j j kkj j j j c j j j j j j j j j k k j j j k j j j k -++-=⨯+++-+++--+---+-∑再利用恒等式()()()()()()()()()!!!2!2!!!!!121211*********j j j j j j j j k j j j k j j j k k j j j j j j kk-+-+=-+---+-+++--∑这样()()()()()121212()12, 1212212!2!1!!j j j j j j j j Cj j j j j j -⎡⎤+=⎢⎥++-+-⎣⎦(28)代入(27) 式得()()()()()()()()()()()()1212121212121212,1211112222!!!!!21=1!!!!!j j j m m j j j j j j j j j j m m j m m j C j j j j m j m j m j m ⎡⎤+--++-++--+⨯⎢⎥++++-+-⎣⎦()()()()()()22211112121212+!!1!!!!k j m kj j m k j m k k j m m k j j j k j j m m k +++--+-++--+----+∑将其代入(18)式, 最后得C-G 系数为:()()()()()()()()()()()()121212121212,1211112222!!!!!211!!!!!j j jm m m j j j j j j j j j j m j m j C j j j j m j m j m j m ⎡⎤+--++-+-+=⨯⎢⎥++++-+-⎣⎦()()()()()()2221111212+!!1!!!!k j m kj j m k j m k k j m k j j j k j j m k +++--+-+--+---+∑. (29)表1与表2分别给出了11212, j jm m m C⎛⎫ ⎪⎝⎭与()1121, j jm m m C 的C-G 系数.表1 11212, j jm m m C⎛⎫ ⎪⎝⎭系数表2 ()1121, j jm m m C 系数例如11212, j jm m m C⎛⎫⎪⎝⎭, 112j j =+, 212=m .111112111222j j m m C⎛⎫⎪⎝⎭++,()()()12111111111111111111111111111!!!!!222222222222=1111111!!!!!222222j j j j jj j m j m j jj j m j m ⎡⎤⎛⎫⎛⎫⎛⎫⎛⎫⎛⎫++-+-++--++++--+ ⎪ ⎪ ⎪ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎝⎭⎝⎭⎝⎭⎢⎥⨯⎛⎫⎛⎫⎛⎫⎢⎥+++++-+- ⎪ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎝⎭⎣⎦()()1111111111111!!221111111!!!!222222k kj m k j m k k j m k j j k j m k +⎛⎫+++--+ ⎪⎝⎭-⎛⎫⎛⎫⎛⎫+++-+-+----+ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭∑()()()()()()()()()()()()()()()121111111111111111111111111112!1!0!1!!2222!!!1!0!1!!!1! 0!1!1!1!1!0!!!j j m j m j j j m j m j m j m j m j m j m j m j m j m ⎡⎤++-+=⨯⎢⎥++-⎣⎦⎡⎤++-+-+-+⎢⎥++--+-⎣⎦()()1211111111121j m j m j m j ⎛⎫++=--+-+⎡⎤ ⎪⎣⎦+⎝⎭==再例如 ()112,1, j jm m m C , 11+=j j , 12=m .()1111,111, 1j j m m C ++()()()()()()()()()121111111111111111111!11!11!11!11!23111!!!2!0!j j j j j j j m j m j j j j m j m ⎡⎤++-+-++--++++--+=⨯⎢⎥+++++-⎢⎥⎣⎦()()()()()()111111111111!!1!11!11!11!kkj m k j m k k j m k j j k j m k +++--+-+++-+-+-----∑()()()()()()()()()()()()()()()()()()()12111111111111111111111111111111111112!2!0!2!!2323!!!2!0!2!!1!1!!2! 0!2!2!2!1!1!1!1!2!0!!!j j m j m j j j m j m j m j m j m j m j m j m j m j m j m j m j m j m ⎡⎤++-+=⨯⎢⎥++-⎢⎥⎣⎦⎡⎤++-++-++-+-+⎢⎥++--++--+-⎢⎥⎣⎦()()()()()()12111111111111111111(1)(2)(21)(22)11 112122j m j m j j j m j m j m j m j m j m ⎛⎫++++=⨯⎪++⎝⎭⎡⎤-----+-+-+-+⎢⎥⎣⎦()()()()21111122121⎥⎦⎤⎢⎣⎡+++++=j j m j m j C-G 系数有下列性质()()()()()1212121221121221, , , 11j j j j j j j j j j j j jm m m j m m m jm m m C C C +-+----=-=-()()11122112, 221121j m j jj mm mj C j ---⎛⎫+=- ⎪+⎝⎭(30)例如:()()()()()()2212122111(), 01212!!1!!!!k j m j j j m m m kj j m k j m k C C k j m k j j j k j j m k +----+--++=----+--++∑ (31)其中:()()()()()()()()()()()2122221111212121210!!!!!112!!!!!⎥⎦⎤⎢⎣⎡-+-+++++-+-++--+=m j m j m j m j j j j j m j m j j j j j j j j j j C 与求和无关,且在12, , m m m 变号情况下,其值不变.令12j j j k k '-+-=,则12k j j j k '=-+-, (31)式求和项变为:()()()()()()122211211212!!1!!!!j j j m k k j m k j j m k j j j k k j j m k j m k '-+--'''-+++--''''-+---++-∑而()()()()122122221222241111j j j m k j j j j j m k j j jk j m '''-+----+---+-++-=-=--这样()()12221212(), 011j j jk j m j j j m m m kC C +-++---=--⨯∑()()()()()21111212!!!!!!j j m k j m k k j m k j j j k j j m k ++--++--+---+()()121212,=1j j j j j jm m m C +--.其它性质亦可用同样方法予以证明.例1:现在我们利用两波函数的耦合公式()12121211221211221212()12, 12, 12()()()()()j jj j jm m m jmj m j m jm m m j m j m m m m m r r C r r C r r +ψ=ψψ=ψψ∑∑(32)及表1所给的C-G 函数来讨论两电子的合成自旋波函数,为此采用惯用的符号⎪⎪⎭⎫⎝⎛=01α, ⎪⎪⎭⎫ ⎝⎛=10β (33)分别代表自旋向上⎪⎭⎫ ⎝⎛=21z S 与自旋向下⎪⎭⎫ ⎝⎛-=21z S 的自旋波函数,用mj ,代表合成的自旋波函数.由于电子的自旋为2121==j j ,则合成的总自旋为1, 0j =. 当1=j 时,1, 0, 1m =-. 当0=j 时,0=m . 考虑到21m m m +=,则由表1可得121122, jm m m C⎛⎫ ⎪⎝⎭系数,如表3示.表3 121122, jm m m C ⎛⎫ ⎪⎝⎭函数这样由(32)、(33)两式及上表可得:()()()()()()[]()()⎪⎪⎩⎪⎪⎨⎧=-+==211,12121210,1211,1ββαββααα ()()()()[]2121210,0αββα-=以上合成波函数在量子力学中我们早就熟悉.§ 5.9 张量算符1.算符的变换我们先看一下坐标转动时,算符的变换规则.设有算符()r F ˆ,作用在波函数()r ψ后可得到另一波函数()r φ,即()()()r r r F φψ=ˆ(1)设在坐标转动R 下的算符为()R P ˆ,用()R Pˆ作用在上式两边得: ()()()()()r R Pr r F R P φψˆˆˆ= 求:()()()()()()()r R Pr R P R P r F R P φψˆˆˆˆˆ1=- 令()()()()R P r F R P r F1ˆˆˆˆ-=' (2)且注意到:()()()r R r R P 1ˆ-=φφ ()()()r R r R P 1ˆ-=ψψ则上式变为:()()()rR r R r F 11ˆ--='φψ(3)又由(1)式知:()()()rR r R r F 11ˆ--='φψ(4)因此:()()()()()r R F R P r F R P r F11ˆˆˆˆˆ--==' (5)2. 矢量算符如果算符F ˆ有三个分量iF ˆ()3,2,1=i ,在坐标转动变换下,它按如下规则变换()()F R R P F R P Fˆˆˆˆˆ11--==' (6)或()()∑∑==='--jjji jj ij i i F R F R R P F R P F ˆˆˆˆˆˆ11()3,2,1,=j i(7)则该Fˆ为矢量算符.例1.算符iix e ∂∂=∇是矢量算符(3,2,1=i )分别对应于x ,y ,z )是矢量算符.因为此时iix F ∂∂=ˆ,在坐标经R 变换后,Rrr ='或∑='jj ij i x R x(8)而()()r F R r F x R x x x x j j ji i j j ji jj i j i '=⇒'∂∂='∂∂∂'∂=∂∂∑∑∑ˆˆ)8(式 (9)又由算符变换性质(5)知()()()()()()()()r F R P r F R P r R F R P r R F R P ii ˆˆˆˆˆˆˆˆ1111='⇒='---- (10)(9)+(10)得()()()()()r F R R P r F R P r F j jji i i ˆˆˆˆˆ1∑=='-因此按矢量算符的定义(6)或(7)知,iix e ∂∂=∇是矢量算符.3.二阶张量算符如果算符F ˆ有9个分量ij F ˆ()3,2,1,=j i ,而且ijF ˆ的变换性质为:()()()()klkllj ki kkl ljk ik ij ij F R R F R R R P r F R P r F ˆˆˆˆˆˆ111∑∑∑==='--- (11)则称Fˆ为二阶张量算符.由于()klij lj ki R R R R ⊗=,所以ijF ˆ是按直积R R ⊗变换的.4. 高阶张量算符如个指数n ijk F ˆ的变换性质为:()()∑'''''''''-=k j i k j i k k j j ii ijk F R R RR P F R P ˆˆˆˆ1 (12)则称k j i F '''ˆ为n 阶张量算符,n 是F ˆ下脚标的数目,显然矢量算符可以看成是一阶张量算符.5.不可约张量算符设有算符()l mT ˆl l l m ,,1, +--=,共有12+l 个分量,它们在坐标转动R 下,按下式变换()()()()()()()l m llm lmm l ml m T R D R P T R P T '-='-∑=='ˆˆˆˆˆ1(13)也就是说,()l m T ˆ的12+l 个分量按SO (3)群的不可约表示()()R D l 变换,则称()l mT ˆ为l -阶不可约张量算符.当0=l 时,即为零阶不可约张量算符,它只有一个分量()00ˆT ,称为标量算符,其表示矩阵()10=D ,即标量算符在坐标转动下不变.当1=l 时,即为1阶不可约张量算符,它有三个分量,其变换关系为:()()()()()()1111ˆˆˆˆm llm mm mT R D R P T R P '-='-∑=()1,0,1,-='m m(14)前面我们曾介绍过矢量算符满足变换关系()()()()r F R R P r F R P j jji i ˆˆˆˆ1∑=-()3,2,1,=j i(15)而由前面§5.4节的讨论知:()()R D l 与R 等阶,即()()11-=M R MD R 或()()∑'-''=mm mi m m m j ji M R D M R 11(16)其中⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛-=-0,2,211,0,00,2,211i i M⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛---=0,1,02,0,221,0,21i i M(17)将(16)代入(15)得:()()()()∑'-''-=m jm j m i m m m j i F M R D M R P F R P ˆˆˆˆ111上式两边同乘in M 并对求和得:()()()()∑∑∑''-'-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛mjm jm j imi in m m ii in F M M M R D R P F M R P ˆˆˆˆ111 利用M 矩阵的正交性nm imi in M M δ=∑-1,上式变为:()()()()∑∑∑'''-⎪⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛m j j m j m m i i in F M R D R P F M R P ˆˆˆˆ11 将上式与(14)式比较知:()∑'''=m m m m l m F M T ˆˆ(18)亦即:()()()()()⎪⎪⎪⎩⎪⎪⎪⎨⎧-==+-=-21113102111ˆˆ21ˆˆˆˆˆ21ˆF i F T F T F i F T (19)由此可见,任一矢量算符的分量可组合成一阶不可约张量算符.在前面§5.6节中我们曾得绕任意方向n绕角为α的转动算符为()()ταα ⋅-=n i R P ne x p ,ˆ 若取n沿z 轴,转角0→∆=ηα,则()()zz z L i L i R P ˆ1ˆexp ,ˆηαηαη∆-≈∆-=∆ (20)而此时()()()()m i m m l m m l m m eD R D ηδη∆-'''=∆=,0,0 (21)将(20)与(21)两式代入(13)式得:()()()()()()l mm l m m z l m z T D R P T R P '''-∑∆=∆∆ˆ,0,0,ˆˆ,ˆ1ηηη 亦即:()()()()()l ml m z l m z T m i T L i T L i ˆˆˆ1ˆˆ1ηηη∆-=∆+∆- 由此可得:()[]()l ml m z T m T L ˆˆ,ˆ= (22)结合§5.6节的结果,同样的方法可以证明.()[]()()[]()l m l m T m l m l T L 121ˆ1ˆ,ˆ±±+±=(23)其中yx L i L L ˆˆˆ±=±.下面我们再讨论一下,不可约张量算符对按()3SO 群不可约变换的函数作用.设22m j ψ是按不可约表示()2j D变换的函数,不可约张量算符()11ˆj mT 作用在22m j ψ上后,在转动变换下有:()()()()()()22112211ˆˆˆˆˆˆ1m m j j m j j m R P R P T R P T R P ψ=ψ-()()()()()221222111111ˆm j m j m m m j m j m m R D T R D '''''ψ=∑∑ ()()()()()222111222111ˆm j m m j m j m m j m m T R D R D '''''ψ=∑()()[]()222111212121ˆm j m m j m m m m m j j T D D '''''ψ⊗=∑(24)由此可见,()()121221++j j 个函数()2211ˆm j j m T ψ按()3SO 群的表示直积()()21j j D D ⊗变换,则由前面§5.8节的讨论知,()2211ˆm j j m T ψ不是角动量2ˆJ 与zJ ˆ的本征函数,利用C-G 函数,可将()2211ˆm j j m T ψ线形组合为:()()∑ψ=2122112121ˆ,m m m j j m j j m m jm jm T C ψ(25)其中,,,1,212121j j j j j j j ++--= j j j m ,,1, +--=,则jm ψ将构成总角动量2ˆJ 与zJ ˆ的本征函数,其本征值方程为:()()∑ψ=2122112121ˆˆˆ,m m m j j m z j j m m jm jmz T J C J ψ()()()()()∑ψ+=212211112121ˆˆˆ1,22m m m j j m z j m j j m m jm T m J T C 式()()()∑ψ+=2122112121ˆ,21m m m j j m j j m m jm T C m m()()∑ψ=2122112121ˆ,m m m j j m j j m m jm T C m()()∑ψ=2122112121ˆ,m m m j j m j j m m jm T C m亦即jmjm z m J ψψ=ˆ(26)由(23)式,用同样的方法可以证明()()()[]1211ˆˆ±+±=±jm jm y x m j m j J i J ψψ(27)6维格纳-艾卡特(Wigner-Echart )定理现在我们来计算一下不可约张量算符()11ˆj m T 在态222m j Nψ和态Njm ψ之间的矩阵元,这里的2N 与N 代表除22m j 或jm 外的其它量子数,由于算符()R P ˆ的正交性有:()()()()()()()()2221122211ˆˆˆˆ,ˆˆ,1m j N j m Njm m j N j m NjmR P R P T R P R P T ψψ=ψψ-()()()()()()()⎪⎭⎫ ⎝⎛ψψ=∑∑∑''''''''*'m m m j N j m m j m j m m m m Nj j m m R D T R D R D 22222211111ˆ,()()()()()()()()∑''''''''*'ψψ=2122211222111ˆ,m m m m j N j m m Nj j m m j m m j mm T R D R D R D (28)又由前面§5.8节()9'式知()()()()()()()()∑∑'''''''''''=m m j j j m m m j j m m j j m m m j j m m j m m C R D C R D R D 21212121222111,,()()()()∑+-=''+'''+'+''''+''=21212121212121212121,,,j j j j j j j m m m m j j m m m m j j m m m m j C R D C (29)将(29)代入(28)式得:()()()()()()∑'''''''+'''''+''=ψψ2121212121212122211,,ˆ,m m m j j m m j j m m m m j j j m m m m j m j N j m NjmR D C C T()()()222112121ˆ,,m j Nj m m Nj j m m m m T D ''''+'+'ψψ*上式两边对欧勒角γβα,,加权重βsin 积分,并利用不可约表示正交性得()()()()∑'''''+'''''+''=ψψ2121212121212122211,,ˆ,m m m j j j m m m m j j j m m m m j m j N j m NjmC C T()()222112121ˆ,121,,m j N j m m Nj m m m m m m j j T j ''''+'+'''ψψ*+=δδδ()()212121212121212121,,,,12m m m m m m j j m m m m j m m m j j m m m jm j C C '+''''''''+'++∑+*=δδ()()22211ˆ,m j N j m m Nj T '''*ψψ(30)由(30)式知,求和部分仅与j N N ,,2,2j 有关,而与21,,m m m 无关,为简单起见,将求和部分记为:22j NjN T 称为不可约张量算符的约化矩阵,则(30)式可写成:()()()()122212122211ˆˆ,,j j NjN j j m m jm jm N j m Njm T C T =ψψ(31)上式就是维格纳-艾卡特定理的数学形式,说明一个不可约张量算符在角动量本征态之间的矩阵元等于一个C-G 函数与其约化矩阵的直积.由该定理可以看出,不可约张量算符的矩阵元与其中出现的C-G 函数有相同的选择定则,即只有当()j j j 21∆,212121,,1,j j j j j j j ++--=(32) 以及21m m m += (33)时不可约张量算符的矩阵元才不为零.例1. 角动量算符的矩阵元前面在§5.6节中,我们曾经得到角动量算符的矩阵元为:()()()()φθφθ,1,ˆ1±±±+±=lm lm Y m l m l Y L y x L i L L ˆˆˆ±=± ()33' 下面我们由不可约张量算符来导出这些矩阵元.由本节(19)式知,zy x L L L ˆ,ˆ,ˆ可以组合成一阶不可约张量算符为:()()()()()⎪⎪⎪⎩⎪⎪⎪⎨⎧-==+-=-yx z y x L i L T L T L i L T ˆˆ21ˆˆˆˆˆ21ˆ111011(34)前面得到的维格纳-艾卡特定理知:()()()()1,1,122212211ˆll l m m lm m l m lm T C Y TY=(35)为了确定约化矩阵元()12ll T ,在上式中取01=m ,则有:()()()()()1222222222111,10,21ˆˆˆll l m lm mm ll m l z lmm l m lm T C m Y L YY TY===δδ故得:()()222212,10,21ˆmm ll l m lm ll C m T δδ=而由前面§5.8节的讨论知:()()()()()()21,21,222211122211,0,1,10,mm ll C l m lm ll l m lm l l m C C l m mlm δ+-=-=-+-+表知故()()()()2212111ˆ2211ll ll l l lll l l l T δδ+-=+-=-+ 代入(35)式得:()()()()()()1ˆ,1,,1,21211+-=l l C Y T Y l mm lm lm m lm φθφθ (36)则()()()()()()1ˆ,11,,11,221+-=l l C Y T Y l mlm lm lm φθφθ 而()()()()()()1,21,1,1,1,11,2221211+-+⎥⎦⎤⎢⎣⎡++-+=-=m m l m lm l l l m lm l l m l m l C C δ ()()()1,21222121+⎥⎦⎤⎢⎣⎡+-++=m m l l m l m l δ 故()()()()()()1,2122,11,22121ˆ+⎥⎦⎤⎢⎣⎡-++-=m m lm lm m l m l Y T Y δφθφθ 由于()()+-=+-=L L i L T y x ˆ21ˆˆ21ˆ11,故()()()[]()φθφθ,121,1ˆ++-++=lm lm Y m l m l Y L 与()33'式一致.再由(35)式得:()()()()()()1ˆ,11,,11,221+-=--l l C Y T Y l mlm lm lm φθφθ 而。
角动量算符
动量最常用的是惯性动量算符,这个定理几乎可以应用到每一个领域中。
根据这个定理,动量只有在受外力影响时才会发生变化,并保持原有的形态。
因此,要证明或计算一个物体的移动情况,需要综合考虑这个物体受外力的变化以及它的动量。
总而言之,动量算符是一种十分重要的物理定理,它已经成为宇宙中物质之间发生变化机制的基石。
它被广泛应用于各种学科,从生物医学到电子技术,它有助于我们更好地理解宇宙中物质的运动。