线性系统的状态空间表达式
- 格式:ppt
- 大小:1.53 MB
- 文档页数:27
河南工业大学《现代控制理论》实验报告专业: 自动化 班级: F1203 姓名: 蔡申申 学号:201223910625完成日期:2015年1月9日 成绩评定:一、实验题目:线性系统状态空间表达式的建立以及线性变换二、实验目的1. 掌握线性定常系统的状态空间表达式。
学会在MATLAB 中建立状态空间模型的方法。
2. 掌握传递函数与状态空间表达式之间相互转换的方法。
学会用MATLAB 实现不同模型之间的相互转换。
3. 熟悉系统的连接。
学会用MATLAB 确定整个系统的状态空间表达式和传递函数。
4. 掌握状态空间表达式的相似变换。
掌握将状态空间表达式转换为对角标准型、约当标准型、能控标准型和能观测标准型的方法。
学会用MATLAB 进行线性变换。
三、实验过程及结果1. 已知系统的传递函数 (a) )3()1(4)(2++=s s s s G 1.建立系统的TF 模型。
num=4;den=[1 5 7 3 0];G=tf(num,den)G =4-------------------------s^4 + 5 s^3 + 7 s^2 + 3 sContinuous-time transfer function.2.将给定传递函数用函数ss( )转换为状态空间表达式。
再将得到的状态空间表达式用函数tf( )转换为传递函数,并与原传递函数进行比较。
2.1转换成状态空间表达式。
Gss=ss(G)Gss =a =x1 x2 x3 x4x1 -5 -1.75 -0.75 0x2 4 0 0 0x3 0 1 0 0x4 0 0 1 0b =u1x1 1x2 0x3 0x4 0c =x1 x2 x3 x4y1 0 0 0 1d =u1y1 0Continuous-time state-space model.2.2将状态空间表达式转换成传递函数并计较。
G1=tf(Gss)G1 =4-------------------------s^4 + 5 s^3 + 7 s^2 + 3 sContinuous-time transfer function.由之前的实验结果可得实验中的传递函数相同,因为线性变换不改变系统的传递函数。
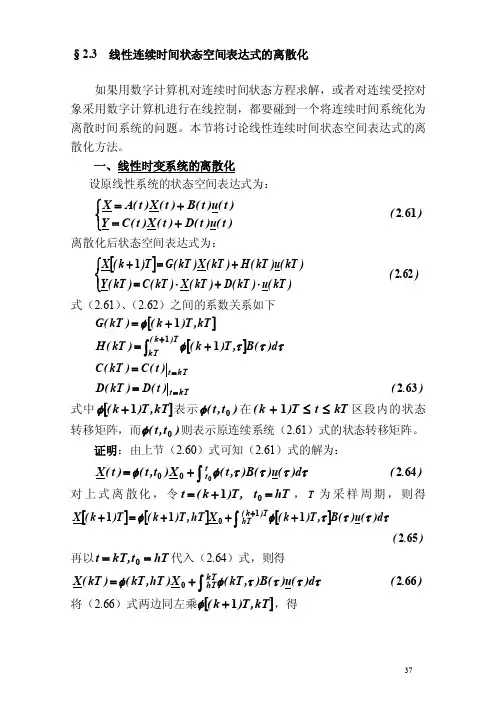
§2.3 线性连续时间状态空间表达式的离散化如果用数字计算机对连续时间状态方程求解,或者对连续受控对象采用数字计算机进行在线控制,都要碰到一个将连续时间系统化为离散时间系统的问题。
本节将讨论线性连续时间状态空间表达式的离散化方法。
一、线性时变系统的离散化 设原线性系统的状态空间表达式为:).()t (u )t (D )t (X )t (C Y )t (u )t (B )t (X )t (A X612⎩⎨⎧+=+=离散化后状态空间表达式为:[]).()kT (u )kT (D )kT (X )kT (C )kT (Y )kT (u )kT (H )kT (X )kT (G T )k (X 6221⎩⎨⎧⋅+⋅=+=+式(2.61)、(2.62)之间的系数关系如下[][]).()t (D )kT (D )t (C )kT (C d )(B ,T )k ()kT (H kT ,T )k ()kT (G kTt kT t T)k (kT632111==+==+=+=⎰τττφφ式中[]kT ,T )k (1+φ表示)t ,t (0φ在kT t T )k (≤≤+1区段内的状态转移矩阵,而)t ,t (0φ则表示原连续系统(2.61)式的状态转移矩阵。
证明:由上节(2.60)式可知(2.61)式的解为:).(d )(u )(B ),t (X )t ,t ()t (X t t 642000ττττφφ⎰+=对上式离散化,令hT t ,T )k (t =+=01,T 为采样周期,则得[][][]).(d )(u )(B ,T )k (X hT ,T )k (T )k (X T )k (hT65211110ττττφφ+++=+⎰+再以hT t ,kT t ==0代入(2.64)式,则得 ).(d )(u )(B ),kT (X )hT ,kT ()kT (X kT hT 6620ττττφφ⎰+=将(2.66)式两边同左乘[]kT ,T )k (1+φ,得[][][][][]).(d )(u )(B ,T )k (X hT ,T )k (d )(u )(B ),kT (kT ,T )k (X )hT ,kT (kT ,T )k ()kT (X kT ,T )k (kT hT kT hT 6721111100ττττφφττττφφφφφ+++=++⋅+=+⎰⎰将(2.65)式减去(2.67)式得:[][][]).(d )(u )(B ,T )k ()kT (X kT ,T )k (T )k (X T )k (kT 6821111ττττφφ+++=+⎰+上式中,令[][]τττφφd )(B ,T )k ()kT (H kT ,T )k ()kT (G T)k (kT⎰+=+=+111设在区间[]T )k (,kT 1+内,)kT (u )(u =τ,则(2.68)式可简写成: [])kT (u )kT (H )kT (X )kT (G T )k (X ⋅+⋅=+1 同时,对(2.61)式输出方程离散化,则证明了)kT (u )kT (D )kT (X )kT (C )kT (Y ⋅+=二、线性时不变系统的离散化 对于线性时不变系统).(uD X C Y u B X A X692⎩⎨⎧+=+=离散化状态空间表达式为).()kT (u D )kT (X C )kT (Y )kT (u )T (H )kT (X )T (G T )k (X 7021⎩⎨⎧+=+=+其中D ,C ),T (H ),T (G 均为常数阵,且).(B)d e ()T (H e)T (G A T AT 7120⎪⎩⎪⎨⎧==⎰ττ证明:由于时不变系统是时变系统的一种特殊情况,所以只需要证明式(2.71)成立即可。


现代控制工程期末复习简单题汇总(大工版本)1.1线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:X=Ax+Bu y=Cx+D线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A, B, C 和D中的各分量均为常数,而对线性时变系统,其系数矩阵A,B,C和D中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
1.2现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答:传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论)仅适用于线性定常系统适用于线性、非线性和时变系统用于系统的外部描述用于系统的内部描述基于频域分析基于时域分析1.3对于同一个系统,状态变量的选择是否惟一?答:对于同一个系统,状态变量的选择不是惟一的,状态变量的不同选择导致不同的状态空间模型。
1.4已知系统的状态空间模型为X =Ax+Bu y=Cx,写出该系统的特征多项式和传递函数矩阵。
答:系统的特征多项式为det(sl-A),传递函数为G(s)二C(sl-A)1.5 一个传递函数的状态空间实现是否惟一?由状态空间模型导出的传递函数是否惟一?答:一个传递函数的状态空间实现不惟一;而由状态空间模型导出的传递函数是惟一的。
第二章2.1试叙述处理齐次状态方程求解问题的基本思路?答:求解齐次状态方程的解至少有两种方法。
一种是从标量其次微分方程的解推广得到,通过引进矩阵指数函数,导出其次状态方程的解。
另一种是采用拉普拉斯变换的方法。
2.2状态转移矩阵的意义是什么?列举状态转移矩阵的基本性质。
答:状态转移矩阵e A(t=t0)的意义是:它决定了系统状态从初始状态转移到下个状态的规律,即初始状态X在矩阵e A(t=t0)的作用下,他t o刻的初始状xO经过时间t-to,后转移到了t时刻的状态x (t )。