机械原理组合机构
- 格式:doc
- 大小:11.21 KB
- 文档页数:2
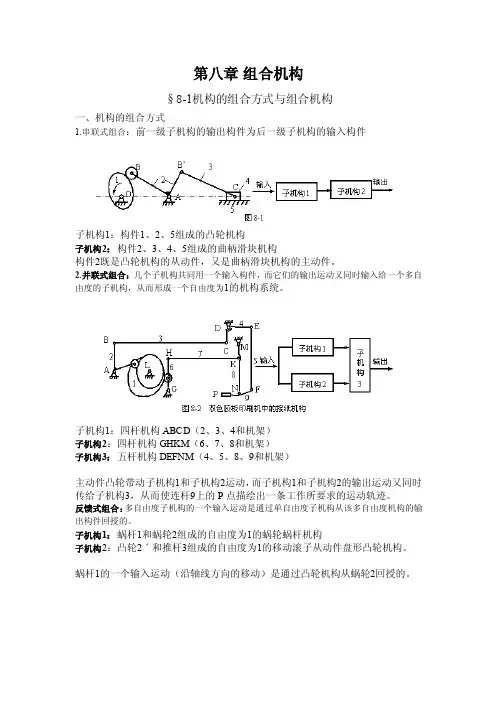
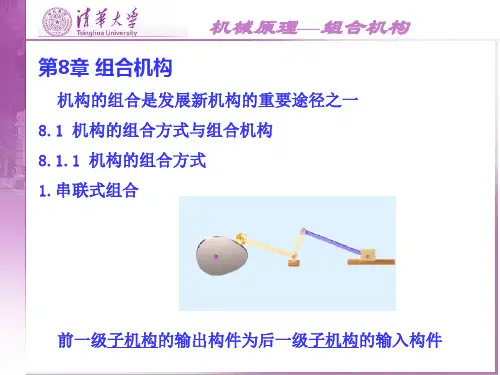
第八章组合机构§8-1机构的组合方式与组合机构一、机构的组合方式1.串联式组合:前一级子机构的输出构件为后一级子机构的输入构件子机构1:构件1、2、5组成的凸轮机构子机构2:构件2、3、4、5组成的曲柄滑块机构构件2既是凸轮机构的从动件,又是曲柄滑块机构的主动件。
2.并联式组合:几个子机构共同用一个输入构件,而它们的输出运动又同时输入给一个多自由度的子机构,从而形成一个自由度为1的机构系统。
子机构1:四杆机构ABCD(2、3、4和机架)子机构2:四杆机构GHKM(6、7、8和机架)子机构3:五杆机构DEFNM(4、5、8、9和机架)主动件凸轮带动子机构1和子机构2运动,而子机构1和子机构2的输出运动又同时传给子机构3,从而使连杆9上的P点描绘出一条工作所要求的运动轨迹。
反馈式组合:多自由度子机构的一个输入运动是通过单自由度子机构从该多自由度机构的输出构件回授的。
子机构1:蜗杆1和蜗轮2组成的自由度为1的蜗轮蜗杆机构子机构2:凸轮2ˊ和推杆3组成的自由度为1的移动滚子从动件盘形凸轮机构。
蜗杆1的一个输入运动(沿轴线方向的移动)是通过凸轮机构从蜗轮2回授的。
复合式组合:由一个或几个串联的基本机构去封闭一个具有两个或多个自由度的基本机构。
子机构1:1、4、5组成的自由度为1的凸轮机构子机构2:1、2、3、4、5组成的自由度为2的五杆机构构件1为主动件,C点的运动是构件1和构件4运动的合成。
*与串联机构的区别与联系:子机构1和子机构2组成关系是串联,但子机构2的输入运动并不完全是子机构1的输出运动。
与并联机构的区别与联系:C点的输出运动是两个输入运动的合成,但这两个输入运动一个来自子机构1,而另一个来自主动件。
二、组合机构概念用一种机构去约束和影响另一个多自由度机构所形成的封闭式机构,或由几种基本机构有机联系、互相协调和配合所组成的机构系统。
子机构:组合机构中的单个基本机构称为组合机构的子机构基础机构:在组合机构中,自由度大于1的差动机构称为组合机构的基础机构。

机械原理机构级别机械原理是研究机械运动和力学性能的科学,而机构则是机械系统中实现特定运动的组成部分。
机构级别是指机构的分类和级别划分,对于理解机械原理和设计机械结构具有重要意义。
一、机构的分类。
机构可以按照其结构和功能进行分类,常见的分类包括平面机构、空间机构、连杆机构、齿轮机构等。
平面机构是指机构中所有运动均在同一平面内完成,而空间机构则是指机构中的运动不仅限于一个平面。
连杆机构是由多个连杆组成的机构,齿轮机构则是由齿轮传动完成运动的机构。
二、机构的级别。
根据机构的复杂程度和功能特点,可以将机构划分为不同的级别。
常见的机构级别包括基本机构、组合机构和复合机构。
1. 基本机构。
基本机构是最简单的机构,它由少数几个零部件组成,完成特定的基本运动。
常见的基本机构包括滑块副、齿轮副、连杆副等。
这些基本机构可以作为机械系统的基础组成部分,实现简单的运动传递和转换。
2. 组合机构。
组合机构是由多个基本机构组合而成,能够完成更复杂的运动和功能。
通过不同的基本机构组合方式,可以实现各种复杂的机械运动,如直线运动、往复运动、旋转运动等。
组合机构在机械系统中起着重要作用,可以满足不同的工程需求。
3. 复合机构。
复合机构是由多个组合机构组合而成,具有更加复杂的结构和功能。
复合机构通常应用于工业生产和高精度机械设备中,能够实现多种复杂的运动和功能要求。
复合机构的设计和应用需要充分考虑各种因素,如运动精度、结构强度、工作稳定性等。
三、机构级别的应用。
机构级别的划分对于机械设计和工程实践具有重要意义。
在机械设计中,根据不同的功能和要求,可以选择合适的机构级别进行设计和应用。
基本机构适用于简单的机械结构和运动传递,组合机构适用于一般的机械系统,而复合机构适用于复杂的机械装置和精密设备。
在工程实践中,机构级别的选择和应用也需要考虑到各种因素,如成本、制造工艺、维护保养等。
合理选择机构级别可以提高机械系统的性能和效率,降低成本和维护成本,提高设备的可靠性和稳定性。
图1 曲柄滑块机构示意图图4-2 曲柄摇杆机构示意图
图4-3 内燃机机构示意图图4-4 精压机机构示意图
图4-5 牛头刨床机构示意图
图6 两齿轮—曲柄摇杆机构示意图
图7 喷气织机开口机构示意图图4-8 冲压机构示意图
图4-9 筛料机构示意图图4-10 插床机构示意图
图11 凸轮—连杆组合机构示意图图12 凸轮—五连杆机构示意图
图13 行程放大机构示意图图14 自卸货车翻转机构示意图
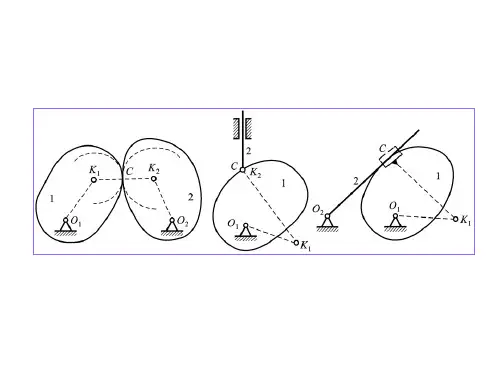
图15 齿轮齿条—双曲柄滑块机构示意图图16 盘型凸轮(尖端推杆)机构示意图
图17 冲压机构示意图
图18 双摆杆摆角放大机构示意图
图19 双摇杆机构示意图。
(一)第1章机构的组成和结构机构:具有确定运动的实物组合体1.1 机构的组成及机构运动简图1.2 机构具有确定运动的条件1.3 机构的组成原理和结构分析1.1 机构的组成及运动简图在组成机构的构件中,必有且仅有一个构件是用于支持和安装其它构件的,称之为机架。
由于在分析机构运动时取机架为静参考系,常称之为固定杆。
每个机构必有且仅有一个机架。
输入运动的构件称原动件。
每个机构至少一件。
其余的构件为从动件。
运动副:两个构件之间直接接触所形成的可动联接两个相邻构件直接接触两者之间允许一定的相对运动每个构件至少和另外一个构件通过运动副联接机构简图:用简单的符号和线条表示机构的组成情况和运动情况构件间直接接触的点,线,面称运动副元素。
低副:面接触高副:点,线接触。
{移动副转动副运动副与构件运动简图:1.必要性为简明地表达机构的运动特性和工作原理,要去掉与运动无关的尺寸,外性等因素。
2。
用规定的符号表达构件和运动副的相对位置和性质。
构件表达中去除与运动传递无关的因素:B A AB(a)(b)B A A B (a)(b)常用平面运动副表示法v运动轨迹为直线移动副转动副平面高副齿轮副用国标规定的简单符号和线条代表运动副和构件,并按一定比例尺表示机构的运动尺寸,绘制出表示机构的简明图形。
机构运动简图与原机械具有完全相同运动特性。
例题规定符号构件的表达:用简单线条连接运动副运动简图的绘制1. 分析整个机构的工作原理2.沿着传动路线,分析相邻构件之间的相对运动关系,确定运动副的类型和数目3. 选择适当的视图平面例1:已知一机构如图所示,试绘制该机构的运动简图动画按钮1234ab c1234abca b c 141223344-----1-------2------3-----4例1:已知一机构如图所示,试绘制该机构的运动简图1234abc a b c 4-----1-------2------3-----4例1:已知一机构如图所示,试绘制该机构的运动简图B C1234A B C动画按钮A B CBC动画按钮2134移动副的演化包容面与被包容面可互换移动副可平移123123R转动副演化动画按钮动画按钮运动链:若干个构件和运动副所连接成的可动系统。
机械原理机构的级别怎么算机械原理机构的级别是根据其包含的运动副种类和数量来进行划分的。
机械原理机构是实现特定功能的机械构成单元,包括运动副(即构件之间的连接方式)和运动装置(即运动副的组合方式)。
机构的级别反映了其运动副的种类和数量,能够直观地描述机构的结构和运动特性,对于机构分析与设计有重要的指导意义。
按照国际标准ISO、IEC 1302,机构能够实现的运动种类分为五类:1. 平动副(T型):两个点之间的直线相对运动;2. 旋转副(R型):两个轴线之间的相对旋转运动;3. 滑动副(P型):两个平行平面相对滑动运动;4. 轴移副(C型):两个同轴线上相对移动运动;5. 旋转滑动副(H型):旋转副和滑动副的组合运动。
机械原理机构的级别根据其包含的运动副种类和数量来划分,具体如下:1. 一级机构:只包含一种运动副;2. 二级机构:包含两种运动副,相关的运动副之间相互连接;3. 三级机构:包含两种运动副,其中一个运动副有一个或多个分支与另一个运动副相连接;4. 四级机构:包含三种运动副,其中两种运动副有一个或多个分支与第三种运动副相连接;5. 五级机构:包含四种运动副,其中三种运动副有一个或多个分支与第四种运动副相连接。
由于一级机构只包含一种运动副,所以其具有最简单的结构和运动特性。
而五级机构则包含了最复杂的运动副组合,具有复杂的结构和运动特性。
每一级机构都具有相应的特点和应用范围。
机构级别的划分有助于对机构的结构和运动特性进行分析和研究。
在机械设计和系统综合中,根据具体的要求和功能来选择适当级别的机构,能够更好地满足设计需求。
根据机构的级别,可以进行运动学和动力学分析,为机构的设计和优化提供依据。
总而言之,机械原理机构的级别是根据其包含的运动副种类和数量进行划分的。
通过对机构级别的划分和分析,可以更好地了解和研究机械原理机构的结构和运动特性,为机构的设计和优化提供指导依据。
机械原理组合机构
机械原理是研究和分析机械工作原理和运动规律的学科,它是机械设计的基础课。
而组合机构是由若干个副动件与主动件相联结构成的,用于实现机械运动传递或者转换的装置。
组合机构可以实现各种不同的运动传递和转换,广泛应用于工业生产和日常生活中。
组合机构的分类有很多种,常见的有平面机构、空间机构、连杆机构等。
平面机构是在同一平面内运动的机构,常见的有曲柄滑块机构、摩擦滑块机构等;空间机构是在三维空间内运动的机构,常见的有球面机构、凸轮机构等;连杆机构是由若干个连杆构成的机构,根据连杆连接方式的不同,可以分为平面连杆机构和空间连杆机构。
在机械原理中,组合机构的设计和分析都离不开运动分析和力学分析。
运动分析主要是分析机构的运动学特性,包括机构的自由度、运动链、滞环以及运动规律等;力学分析主要是分析机构的力学特性,包括受力分析、力传递和传动比等。
这两个方面的分析对于组合机构的设计和优化都具有重要的意义。
组合机构的设计需要考虑诸多因素,如机构的传动比、运动速度、精确度、布置紧凑度、稳定性等。
传动比是指输入输出转速之比,决定了机构的运动规律和运动速度;运动速度是指机构中各副动件的运动速度,要满足机构的工作要求;精确度是指机构计算值和实际值之间的误差,要求精密度高;布置紧凑度是指机构结构的紧凑程度,要占用空间小;稳定性是指机构的稳定性和可靠性,要考虑机
构的振动和噪声问题。
在组合机构的设计中,常见的机构有摩擦滑块机构、曲柄滑块机构、摩擦轮机构等。
摩擦滑块机构是利用摩擦力传递运动的机构,广泛应用于制动器、离合器等装置中;曲柄滑块机构是利用转动运动和滑动运动综合传递运动的机构,常见于往复运动的工作装置中;摩擦轮机构是利用摩擦轮与工件接触产生转动运动的机构,常用于升降装置和传送带等。
总之,机械原理中的组合机构是一种用于实现机械运动传递和转换的装置,通过运动分析和力学分析可以设计和分析各种组合机构。
在设计组合机构时需要考虑传动比、运动速度、精确度、布置紧凑度和稳定性等因素,常见的机构有摩擦滑块机构、曲柄滑块机构和摩擦轮机构等。
对于不同的应用需求,可以选择不同类型的组合机构来满足要求。
通过合理的设计和优化,可以实现机械装置的高效运转和可靠性工作。