凸轮—连杆组合机构优化设计
- 格式:pdf
- 大小:109.12 KB
- 文档页数:5

凸轮—连杆组合机构优化设计分析作者:何铭坤来源:《科学与财富》2017年第19期摘要:为满足机械生产需求,需要在现有基础上,来对凸轮-连杆组合结构进行优化设计,争取提高其运行效率和动作精度。
基于其传动原理,对分度结构几何特性进行分析,并应用运行运动学设计解析法等进行分析,争取进一步提高其运行性能。
本文对凸轮-连杆组合机构优化设计要点与技术进行了简单分析。
关键词:分度机构;凸轮连杆组合机构;优化设计当前,凸轮-连杆组合机构已经在机械自动化设备中得到了广泛应用,这种装置,能够实现任意设计运动规律,自行定义运动轨迹,要想对这种装置进行优化,就必须懂得其工作原理,而后结合计算机,对其进行有目的的优化,确保其各个参数的合理性。
通过优化设计后,使其可以更好的满足机械生产实际需求,提高作业效率。
一、凸轮-连杆组合机构运行原理凸轮-连杆组合机构结构其可以精确地实现提前预设的任意运动规律和运动轨迹,因此在自动机械应用中具有很大的优势。
想要对其进行优化设计,需要掌握其运行原理,即原动杆件逆时针转动时,驱动铰销上的滚动轴承将会在固定槽凸轮槽内运动,然后利用连杆作用,促使推送杆可以按照提前设定好的运动规律或者运动轨迹进行往复运动。
对于凸轮-连杆组合机构的优化设计,首先应当建立凸轮-连杆组合机构的设计模型,通过对模型进行分析,并根据模型就凸轮-连杆组合结构的相关参数进行计算,得出结果,从而确保组合结构优化设计的科学性与合理性。
二、建立凸轮-连杆组合机构设计模型1.机构设计要求对凸轮-连杆组合机构进行优化设计,首先需要保证其横向尺寸最小,然后最大程度上来提高机械传动效率。
根据此设计要求,来建立目标函数,并确定设计变量和约束条件,最后根据模型分析进行求解,得出与组合机构设计相关的参数。
2.建立目标函数确定机构横向尺寸为优化目标函数,根据图1所示,机构横向尺寸主要受曲柄长度r以及滑块位于最左端位置时滑块与凸轮轴心O横向间距h0决定,并且还会受动件形成hm影响,则可确定目标函数为:f(x)=hm+h0+r3.确定设计变量想要实现对凸轮-连杆组合机构的优化设计,要保证各结构部位设计的紧凑,需要在设计时加强对构件尺寸的管理。
一.配气凸轮优化设计1.1配气凸轮结构形式及特点配气凸轮是决定配气机构工作性能的关键零件,如何设计和加工出具有合理型线的凸轮轴是整个配气系统设计中最为重要的问题。
对内燃机气门通过能力的要求,实际上就是对由凸轮外形所决定的气门升程规律的要求,气门开启迅速就能增大时面值,但这将导致气门机构运动件的加速度和惯性负荷增大,冲击、振动加剧、机构动力特性变差。
因此,对气门通过能力的要求与机构动力特性的要求间存在一定矛盾,应该观察所设计发动机的特点,如发动机工作转速、性能要求、配气机构刚度大小等,主要在凸轮外形设计中兼顾解决发动机配气凸轮外形的设计也就是对凸轮从动件运动规律的设计。
从动件升程规律的微小差异会引起加速度规律的很大变动,在确定从动件运动规律时,加速度运动规律最为重要,通常用其基本工作段运动规律来命名,一般有下面几种:1.1.1等加速凸轮等加速凸轮的特点是其加速度分布采取分段为常数的形式,其中又可分为两类,一类可称为“正负零型”,指其相应的挺柱加速度曲线为正—负—零:另一类可称“正零负型”,指其加速度曲线为正一零一负。
当不考虑配气机构的弹性变形时,对最大正负加速度值做一定限制且在最大升程、初速度相同的各种凸轮中,这种型式的凸轮所能达到的时面值最大。
等加速型凸轮常常适用于平稳性易保证,而充气性能较差的中低速柴油机中。
但就实际情况而言,配气机构并非完全刚性,等加速凸轮加速度曲线的间断性必然会影响机构工作平稳性,在高速内燃机中一般不采用等加速型凸轮[9]。
1.1.2组合多项式型组合多项式型凸轮的基本段为一分段函数,它由几个不同的表达式拼接而成。
通过调整各段所占角度及函数方程,获得不同斜率的加速度曲线。
组合多项式型凸轮时面值大,而且能够方便地控制加速度变化率及确保正、负加速段间的圆滑过渡,可以较好地协调发动机充气性能及配气机构工作平稳性的要求[7]。
由于凸轮从动件运动规律由若干函数组成,在各段间联结点处不易保证升程规律三阶以上导数的连续性,可能会影响配气机构工作的平稳性,组合多项式型凸轮主要应用在要求气门时面值大和较好动力性能的情形。
一.配气凸轮优化设计1.1配气凸轮结构形式及特点配气凸轮是决定配气机构工作性能的关键零件,如何设计和加工出具有合理型线的凸轮轴是整个配气系统设计中最为重要的问题。
对内燃机气门通过能力的要求,实际上就是对由凸轮外形所决定的气门升程规律的要求,气门开启迅速就能增大时面值,但这将导致气门机构运动件的加速度和惯性负荷增大,冲击、振动加剧、机构动力特性变差。
因此,对气门通过能力的要求与机构动力特性的要求间存在一定矛盾,应该观察所设计发动机的特点,如发动机工作转速、性能要求、配气机构刚度大小等,主要在凸轮外形设计中兼顾解决发动机配气凸轮外形的设计也就是对凸轮从动件运动规律的设计。
从动件升程规律的微小差异会引起加速度规律的很大变动,在确定从动件运动规律时,加速度运动规律最为重要,通常用其基本工作段运动规律来命名,一般有下面几种:1.1.1等加速凸轮等加速凸轮的特点是其加速度分布采取分段为常数的形式,其中又可分为两类,一类可称为“正负零型”,指其相应的挺柱加速度曲线为正—负—零:另一类可称“正零负型”,指其加速度曲线为正一零一负。
当不考虑配气机构的弹性变形时,对最大正负加速度值做一定限制且在最大升程、初速度相同的各种凸轮中,这种型式的凸轮所能达到的时面值最大。
等加速型凸轮常常适用于平稳性易保证,而充气性能较差的中低速柴油机中。
但就实际情况而言,配气机构并非完全刚性,等加速凸轮加速度曲线的间断性必然会影响机构工作平稳性,在高速内燃机中一般不采用等加速型凸轮[9]。
1.1.2组合多项式型组合多项式型凸轮的基本段为一分段函数,它由几个不同的表达式拼接而成。
通过调整各段所占角度及函数方程,获得不同斜率的加速度曲线。
组合多项式型凸轮时面值大,而且能够方便地控制加速度变化率及确保正、负加速段间的圆滑过渡,可以较好地协调发动机充气性能及配气机构工作平稳性的要求[7]。
由于凸轮从动件运动规律由若干函数组成,在各段间联结点处不易保证升程规律三阶以上导数的连续性,可能会影响配气机构工作的平稳性,组合多项式型凸轮主要应用在要求气门时面值大和较好动力性能的情形。
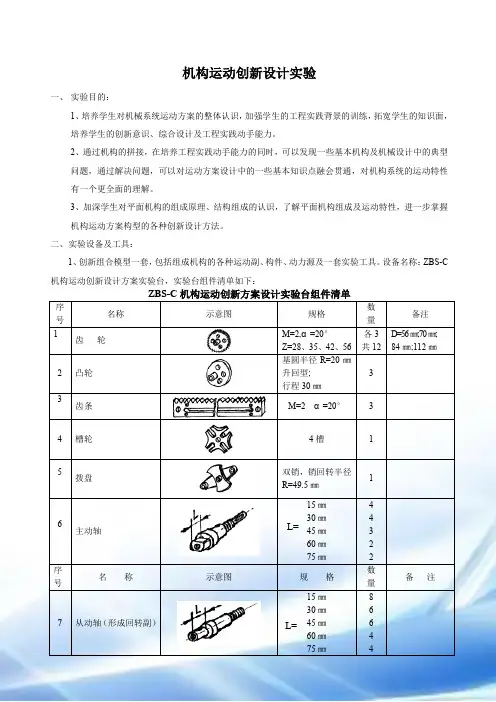
机构运动创新设计实验一、 实验目的:1、培养学生对机械系统运动方案的整体认识,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。
2、通过机构的拼接,在培养工程实践动手能力的同时,可以发现一些基本机构及机械设计中的典型问题,通过解决问题,可以对运动方案设计中的一些基本知识点融会贯通,对机构系统的运动特性有一个更全面的理解。
3、加深学生对平面机构的组成原理、结构组成的认识,了解平面机构组成及运动特性,进一步掌握机构运动方案构型的各种创新设计方法。
二、实验设备及工具:1、创新组合模型一套,包括组成机构的各种运动副、构件、动力源及一套实验工具。
设备名称:ZBS-C 机构运动创新设计方案实验台,实验台组件清单如下:序号 名称示意图规格数 量备注1 齿 轮M=2,α=20° Z=28、35、42、56 各3共12 D=56㎜;70㎜; 84㎜;112㎜ 2 凸轮基圆半径R=20㎜升回型; 行程30㎜ 33 齿条M=2 α=20°34槽轮4槽15拨盘双销,销回转半径R=49.5㎜ 1 6主动轴15㎜ 30㎜ 45㎜60㎜ 75㎜ 4 4 3 2 2序号名 称 示意图 规 格 数 量 备 注7 从动轴(形成回转副)15㎜ 30㎜ 45㎜60㎜ 75㎜8 6 6 4 4L= L=8 从动轴(形成移动副)15㎜ 30㎜ 45㎜60㎜ 75㎜8 6 6 4 49转动副轴(或滑块)L=5㎜3210复合铰链Ⅰ(或滑块)L=20㎜811复合铰链Ⅱ(或滑块)L=20㎜812 主动滑块插件40㎜55㎜1113 主动滑块座114 活动铰链座Ⅰ螺孔M816可在杆件任意位置形成转-移副15活动铰链座Ⅱ螺孔M516可在杆件任意位置形成移动副或转动副 16 滑块导向杆(或连杆)L=330㎜417 连杆Ⅰ100㎜ 110㎜ 150㎜160㎜ 240㎜ 300㎜ 12 12 8 8 8 8 序号名 称 示意图 规 格数 量备 注 18 连杆ⅡL 1=22㎜ L 2=138㎜819 压紧螺栓M564L= L= L=20 带垫片螺栓M54821 层面限位套4㎜ 7㎜ 10㎜ 15㎜30㎜ 45㎜ 60㎜ 6 6 20 40 20 20 1022紧固垫片(限制轴回转)厚2㎜孔¢16,外径¢222023 高副锁紧弹簧324 齿条护板625 T 型螺母20用于电机座和行程开关座的固定 26 行程开关碰块127 皮带轮628 张紧轮329 张紧轮支承杆330 张紧轮销轴3序号名 称 示意图规 格数 量备 注31 螺栓ⅠM10×15632 螺栓ⅡM10×206L=33 螺栓ⅢM8×15 1634 直线电机10㎜/s 1 带电机座及安装螺栓/螺母35 旋转电机10r/min 3 带电机座及安装螺栓/螺母36 实验台机架机架内可移动立柱5根,每根立柱上可移动滑块3块。
机械原理西⼯⼤版(第⼋版)课后习题答案机械原理西⼯⼤版(第⼋版)课后习题答案第2章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进⾏分类的?答:参考教材5~7页。
2-2 机构运动简图有何⽤处?它能表⽰出原机构哪些⽅⾯的特征?答:机构运动简图可以表⽰机构的组成和运动传递情况,可进⾏运动分析,⽽且也可⽤来进⾏动⼒分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的⾃由度时,机构的运动将发⽣什么情况?答:参考教材12~13页。
2-4 何谓最⼩阻⼒定律?试举出在机械⼯程中应⽤最⼩阻⼒定律的1、2个实例。
2-5 在计算平⾯机构的⾃由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-20所⽰的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何⼀处,被连接的两构件上连接点的轨迹重合是由于其他两处的作⽤,所以只能算⼀处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?答:参考教材18~19页。
2-8 为何要对平⾯⾼副机构进⾏“⾼副低代"?“⾼副低代”应满⾜的条件是什么?答:参考教材20~21页。
2-9 任选三个你⾝边已有的或能观察到的下列常⽤装置(或其他装置),试画出其机构运动简图,并计算其⾃由度。
1)折叠桌或折叠椅;2)酒瓶软⽊塞开盖器;3)⾐柜上2-11图⽰为⼀简易冲床的初拟设计⽅案。
设计者的思路是:动⼒由齿轮j输⼊,使轴A连续回转;⽽固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的⽬的。
试绘出其机构运动简图(各尺⼨由图上量取),分析是否能实现设计意图,并提出修改⽅案。
1)取⽐例尺绘制机构运动简图2)分析是否能实现设计意图解:f=,可改为f=?-?-=不合理∵03324102-12图⽰机构为⼀凸轮齿轮连杆组合机构,试绘制其机构⽰意简图并计算⾃由度。
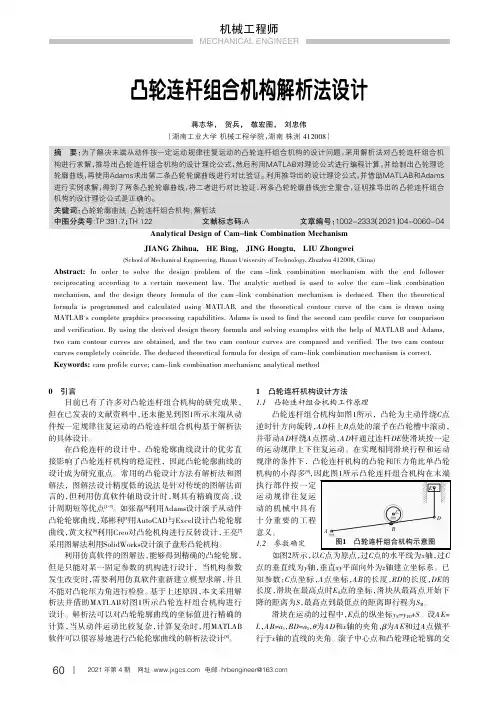
凸轮连杆组合机构解析法设计蒋志华,贺兵,敬宏图,刘忠伟(湖南工业大学机械工程学院,湖南株洲412008)图1凸轮连杆组合机构示意图E D CB 0引言目前已有了许多对凸轮连杆组合机构的研究成果,但在已发表的文献资料中,还未能见到图1所示末端从动件按一定规律往复运动的凸轮连杆组合机构基于解析法的具体设计。
在凸轮连杆的设计中,凸轮轮廓曲线设计的优劣直接影响了凸轮连杆机构的稳定性,因此凸轮轮廓曲线的设计成为研究重点。
常用的凸轮设计方法有解析法和图解法,图解法设计精度低的说法是针对传统的图解法而言的,但利用仿真软件辅助设计时,则具有精确度高、设计周期短等优点[1~3]。
如张磊[4]利用Adams 设计滚子从动件凸轮轮廓曲线,郑彬利[5]用AutoCAD 与Excel 设计凸轮轮廓曲线,黄文权[6]利用Creo 对凸轮机构进行反转设计,王亮[7]采用图解法利用SolidWorks 设计滚子盘形凸轮机构。
利用仿真软件的图解法,能够得到精确的凸轮轮廓,但是只能对某一固定参数的机构进行设计,当机构参数发生改变时,需要利用仿真软件重新建立模型求解,并且不能对凸轮压力角进行检验。
基于上述原因,本文采用解析法并借助MATLAB 对图1所示凸轮连杆组合机构进行设计。
解析法可以对凸轮轮廓曲线的坐标值进行精确的计算,当从动件运动比较复杂,计算复杂时,用MATLAB 软件可以很容易地进行凸轮轮廓曲线的解析法设计[8]。
1凸轮连杆机构设计方法1.1凸轮连杆组合机构工作原理凸轮连杆组合机构如图1所示,凸轮为主动件绕C 点逆时针方向旋转,A D 杆上B 点处的滚子在凸轮槽中滚动,并带动A D 杆绕A 点摆动,A D 杆通过连杆DE 使滑块按一定的运动规律上下往复运动。
在实现相同滑块行程和运动规律的条件下,凸轮连杆机构的凸轮和压力角比单凸轮机构的小得多[9]执行部件按一定运动规律往复运动的机械中具有十分重要的工程意义。
1.2参数确定如图2所示,点为原点,过C 点的水平线为x 轴,过C 点的垂直线为y 轴,垂直xy 平面向外为z 轴建立坐标系。
辽宁工程技术大学配气机构凸轮型线优化设计教师评语:摘要配气机构是发动机的核心部件,其设计合理与否直接关系到内燃机的动力性、经济性、环保性及工作的可靠性。
随着内燃机高功率、高速化,人们对其性能指标的要求越来越高,要求其在高速运行的条件下仍然能够平稳、可靠地工作,因而对其配气机构提出了更高的要求。
配气凸轮型线是配气机构的核心部分,配气凸轮型线设计是配气机构优化设计的重要途径之一。
关键词: 配气机构,凸轮型线,发动机,配气机构,优化设计AbstractThe valve train is one of the most important mechanisms in a internal combustion engine, whether the performances are good or bad, that affecting the power performance, economic performance, emissions performance of the engine, as well as affecting the reliability and wear performances of the whole engine. Along with the requests of the engine's high power, super-speed, people demand a higher index. That is, when the engine runs under a high speed, it can still work steadily and dependably, which demand that the valve train system should have a high performance. Cam profile is the hard core of the valve train, which design is one of the important ways to carry out valve train optimal design. Simulation calculation and experimentation research are two important ways to carry out research and development on valve train of internal-combustion engine.Key words: Internal-combustion engine, Valve train, Cam profile, Optimization design发动机原理大作业——汽车06—3班赵雪峰第1章绪论1.1引言配气机构是内燃机的重要组成部分。
凸轮—连杆组合机构的优化设计朱 江(北京石油化工学院机械工程系,北京102600)摘要:以最大压力角为最小做为优化目标,并采用坐标轮换法和黄金分割法等优化方法对书本打包机中的推书机构(凸轮—连杆组合机构)进行优化设计,从而使得机构确保运动的平衡性的前题下具有良好的传力性能,使设计结果更加合理。
关键词:机构尺度综合;机构优化设计;组合机构;计算机辅助设计中图分类号:TH112 文献标识码:A 文章编号:1006-0316(2002)02-0024-02The optimum design on cam -connecting rod combined mechanismZHU Jiang(Department of mechanical Engineering ,Beijing Institute of Petro —chemical Technology ,Beijing 102600,China )Abstract :This paper takes minimizing the maximum angle as optimum objective ,and adopt ordinate shifting method and gold di 2viding method to optimize -the design of the mechanism pushing books (cam -connecting rod combined mechanism )in bundling ma 2chine of books.Thereby makes the mechanism have good force property and more rational designing result.K ey w ords :mechanism dimension synthesis ;mechanical optimum design ;combined mechanism ;CAD收稿日期:2001-03-27作者简介:朱江,女,45岁,副教授,从事高校机械设计,机械制图教授和研究工作。
2024年 第48卷 第4期Journal of Mechanical Transmission 面向车门锁电动吸合开启优先功能的凸轮摆杆柔顺连杆组合机构殷传硕1 杭鲁滨1,2 钟传磊1 曲志洋1 张佳乐1 黄晓波1 刘哲3 陈勇3(1 上海工程技术大学 机械与汽车工程学院, 上海 201620)(2 上海市大型构件智能制造机器人技术协同创新中心, 上海 201620)(3 泛亚汽车技术中心有限公司, 上海 201201)摘要 针对高端汽车门锁电动吸合及开启优先功能需求,提出了凸轮摆杆柔顺连杆组合机构,构造了双凸轮单摆杆和含弹簧构件四杆机构的组合机构,结合限位块、接触状态、凸轮间歇运动、型面突变等构件特征,可实现柔顺自适应滚滑、刚性拨动、避让释放3种运动模式及各模式间切换;嵌入锁内棘轮棘爪锁紧机构,将组合机构转化为电动吸合与开启支链;对应汽车门锁电动吸合、手/电动开启及复位、吸合复位3种工况,以相应驱动方式和运动边界条件,研究分析了吸合运动与锁内现有支链的运动兼容功能、开启优先功能、吸合卡止情况半锁开启功能。
将机构及驱动嵌入车门锁进行仿真,研究了全工况开启凸轮与摆杆、摆杆与棘轮、棘轮与棘爪的接触力;机构仿真实现各功能动作的时间与车门锁设计要求匹配,其由半锁到全锁的吸合过程时间为420.97 ms ,复位时间为29.03 ms ,手动开启时间为622 ms 。
关键词 汽车侧门锁 凸轮摆杆柔顺连杆组合机构 多运动模式 棘轮棘爪 接触力Cam Swing Linkage and Spring Linkage Combined Mechanism for VehicleSide-door Latches with Electric Cinch and Release Priority FunctionYin Chuanshuo 1 Hang Lubin 1,2 Zhong Chuanlei 1 Qu Zhiyang 1 Zhang Jiale 1 Huang Xiaobo 1Liu Zhe 3 Chen Yong 3(1 School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China)(2 Shanghai Collaborative Innovation Center of Intelligent Manufacturing Robot Technology for Large Components, Shanghai 201620, China)(3 Pan Asia Technical Automotive Center Co., Ltd., Shanghai 201201, China)Abstract Aiming at the demand of electric cinch and release priority function of high-end vehicle doorlatches, a cam swing linkage and spring linkage combined mechanism is proposed, and a combined mechanism of double cam single swing linkage and spring four bar mechanism is constructed. Combined with the characteristics of limiting blocks, contact states, cam intermittent movement, profile abrupt change and other components, it can realize three motion modes of flexible and adaptive rolling, rigid pushing, avoiding and releasing, and switch among them. Embedded into the ratchet and pawl locking mechanism, the combined mechanism is transformed into electric cinch and release branches, corresponding to the three working conditions of the vehicle door latch:electric cinch, manual or power release and reset, and cinch branch reset. Based on the corresponding driving modes and motion boundary conditions, the compatible function of the cinch motion and the existing branches in the latch, the release priority function, and the half-lock release function in the case of the cinch pinch are studied and analyzed. The mechanism and the drive are embedded in the door latch for simulation, and the contact force between the release cam and the swing linkage, the swing linkage and the ratchet, and the ratchet and the paw are studied in all working conditions. The time of the mechanism to realize each function matches the design requirements of the vehicle door latch, the time of the electric cinch process is 420.97 ms, the reset time is 29.03 ms, and the manual release time is 622 ms.Key wordsVehicle side-door latchCam swing linkage and spring linkage combined mechanismMulti-motion mode Ratchet and pawl Contact force文章编号:1004-2539(2024)04-0138-10DOI :10.16578/j.issn.1004.2539.2024.04.019138第4期殷传硕,等:面向车门锁电动吸合开启优先功能的凸轮摆杆柔顺连杆组合机构0 引言面向高端汽车门锁的市场需求,具有电动吸合和开启功能的汽车门锁机构设计是关键技术[1]。