机器人运动学(精品教程)
- 格式:pdf
- 大小:1.35 MB
- 文档页数:45
第三章机器人运动学机器人运动学是研究机器人如何在二维或三维空间中进行运动的学科。
它涉及到机器人的轨迹规划、运动控制和路径规划等重要内容。
本章将介绍机器人运动学的基本概念和常用模型,帮助读者全面了解机器人的运动规律和控制原理。
1. 机器人运动学的基本概念机器人运动学是研究机器人位置和姿态变化的学科,包括正运动学和逆运动学两个方面。
正运动学研究机器人的末端执行器的位置和姿态如何由关节变量确定;逆运动学则研究机器人如何通过末端执行器的位置和姿态来确定关节变量的值。
机器人的运动学建模一般采用DH(Denavit-Hartenberg)参数表示方法。
DH 参数是由Denavit和Hartenberg提出的一种机器人坐标系的选择和旋转轴的确定方法。
通过定义一系列关节坐标系,建立起机器人的坐标系链,并确定各个关节的旋转轴和约定的方向,可以方便地描述机器人的运动学特性。
2. 机器人正运动学机器人正运动学是研究机器人末端执行器位置和姿态如何由关节变量确定的问题。
在机器人的正运动学中,常用的方法有几何法和代数法。
2.1 几何法几何法是一种较为直观的方法,通过对机器人各个关节坐标系的位置和旋转进行推导,得到机器人末端执行器的位置和姿态。
几何法适用于无约束和无外力干扰的情况,可以简单快速地推导出机器人的正运动学方程。
2.2 代数法代数法是一种基于运动学链的代数运算的方法,通过DH参数建立起机器人的坐标系链,并通过矩阵运算推导出机器人的正运动学方程。
代数法在机器人正运动学的推导和计算过程中更具有普适性和灵活性。
3. 机器人逆运动学机器人逆运动学是研究机器人如何通过末端执行器的位置和姿态来确定关节变量的值的问题。
机器人逆运动学在机器人运动规划和路径控制中起到重要的作用。
机器人逆运动学的求解一般采用迭代方法,通过迭代计算来逼近解析解,实现对机器人关节变量的求解。
逆运动学的求解过程中可能会出现奇异点和多解的情况,需要通过约束条件和优化方法来处理。


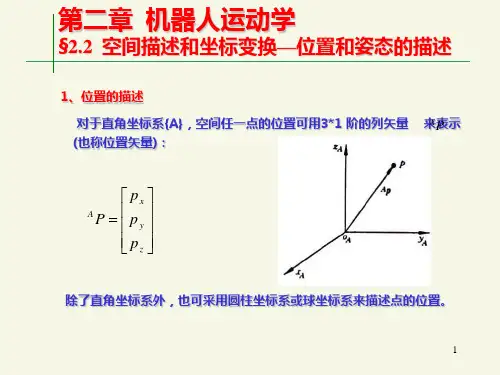
第2章 机器人位置运动学2.1 引言本章将研究机器人正逆运动学。
当已知所有的关节变量时,可用正运动学来确定机器人末端手的位姿。
如果要使机器人末端手放在特定的点上并且具有特定的姿态,可用逆运动学来计算出每一关节变量的值。
首先利用矩阵建立物体、位置、姿态以及运动的表示方法,然后研究直角坐标型、圆柱坐标型以及球坐标型等不同构型机器人的正逆运动学,最后利用Denavit-Hartenberg(D-H)表示法来推导机器人所有可能构型的正逆运动学方程。
实际上,机器手型的机器人没有末端执行器,多数情况下,机器人上附有一个抓持器。
根据实际应用,用户可为机器人附加不同的末端执行器。
显然,末端执行器的大小和长度决定了机器人的末端位置,即如果末端执行器的长短不同,那么机器人的末端位置也不同。
在这一章中,假设机器人的末端是一个平板面,如有必要可在其上附加末端执行器,以后便称该平板面为机器人的“手”或“端面”。
如有必要,还可以将末端执行器的长度加到机器人的末端来确定末端执行器的位姿。
2.2 机器人机构机器手型的机器人具有多个自由度(DOF ),并有三维开环链式机构。
在具有单自由度的系统中,当变量设定为特定值时,机器人机构就完全确定了,所有其他变量也就随之而定。
如图2.1所示的四杆机构,当曲柄转角设定为120°时,则连杆与摇杆的角度也就确定了。
然而在一个多自由度机构中,必须独立设定所有的输入变量才能知道其余的参数。
机器人就是这样的多自由度机构,必须知道每一关节变量才能知道机器人的手处在什么位置。
图2.1 具有单自由度闭环的四杆机构如果机器人要在空间运动,那么机器人就需要具有三维的结构。
虽然也可能有二维多自由度的机器人,但它们并不常见。
机器人是开环机构,它与闭环机构不同(例如四杆机构),即使设定所有的关节变量,也不能确保机器人的手准确地处于给定的位置。
这是因为如果关节或连杆有丝毫的偏差,该关节之后的所有关节的位置都会改变且没有反馈。