槽轮机构图纸及简单尺寸
- 格式:doc
- 大小:276.00 KB
- 文档页数:4
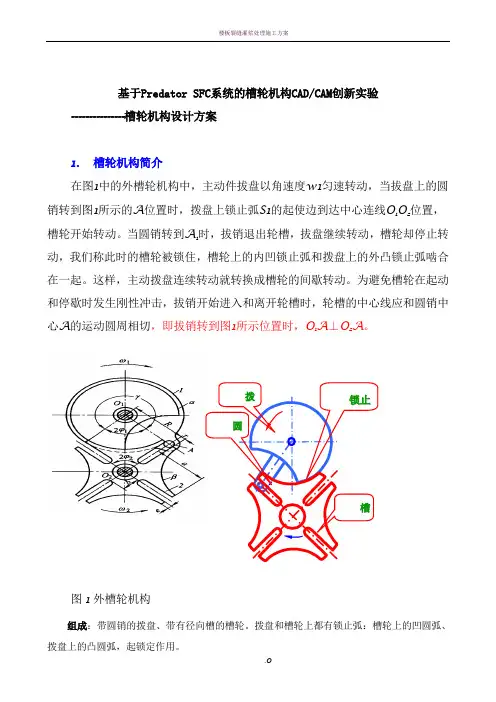
基于Predator SFC 系统的槽轮机构CAD/CAM 创新实验---------------槽轮机构设计方案1. 槽轮机构简介在图1中的外槽轮机构中,主动件拔盘以角速度w1匀速转动,当拔盘上的圆销转到图1所示的A 位置时,拨盘上锁止弧S1的起使边到达中心连线O 1O 2位置,槽轮开始转动。
当圆销转到A 1时,拔销退出轮槽,拔盘继续转动,槽轮却停止转动,我们称此时的槽轮被锁住,槽轮上的内凹锁止弧和拨盘上的外凸锁止弧啮合在一起。
这样,主动拨盘连续转动就转换成槽轮的间歇转动。
为避免槽轮在起动和停歇时发生刚性冲击,拔销开始进入和离开轮槽时,轮槽的中心线应和圆销中心A 的运动圆周相切,即拔销转到图1所示位置时,O 1A ⊥O 2A 。
图1外槽轮机构组成:带圆销的拨盘、带有径向槽的槽轮。
拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘上的凸圆弧,起锁定作用。
ωωo o 锁止弧 槽轮 拨盘 圆销工作过程:拨盘连续回转,当两锁止弧接触时,槽轮静止;反之槽轮运动。
作用:将连续回转变换为间歇转动。
特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地进行转位。
因槽轮运动过程中角速度有变化,不适合高速运动场合。
2.槽轮机构优点(1)结构简单,工作可靠,效率较高;(2)在进入和脱离啮合时运动较平稳,能准确控制转动的角度;(3)转位迅速,从动件能在较短的时间内转过较大的角度;(4)槽轮转位时间与静止时间之比为定值。
3.槽轮机构缺点(1)槽轮的转角大小不能调节;(2)槽轮转动的始、末位置加速度变化较大,从而产生冲击:(3)在工作盘定位精度要求较高时,利用锁紧弧面往往满足不了要求,而需另加定位装置。
(4)槽轮的制造与装配精度要求较高。
由于这些原因,槽轮机构一般应用在转速不高的装置中。
4.槽轮机构的工作原理槽轮机构,又叫马尔他机构或日内瓦机构,由具有径向槽的槽轮1和具有拨销2的拨杆3组成,其工作原理如图2所示。
图2 槽轮机构工作原理简图当拨杆转过一定的角度,拨动槽轮转过一个分度角,由图(a)所示的位置转到图(b)所示的位置时,拨销退出轮槽,此后,拨杆空转,直至拨销进入槽轮的下一个槽内,才又重复上述的循环。
槽轮机构设计方案------------------------------------------作者------------------------------------------日期基于Predator SFC系统的槽轮机构CAD/CAM创新实验---------------槽轮机构设计方案1.槽轮机构简介在图1中的外槽轮机构中,主动件拔盘以角速度w1匀速转动,当拔盘上的圆销转到图1所示的A位置时,拨盘上锁止弧S1的起使边到达中心连线O1O2位置,槽轮开始转动。
当圆销转到A1时,拔销退出轮槽,拔盘继续转动,槽轮却停止转动,我们称此时的槽轮被锁住,槽轮上的内凹锁止弧和拨盘上的外凸锁止弧啮合在一起。
这样,主动拨盘连续转动就转换成槽轮的间歇转动。
为避免槽轮在起动和停歇时发生刚性冲击,拔销开始进入和离开轮槽时,轮槽的中心线应和圆销中心A的运动圆周相切,即拔销转到图1所示位置时,O1A⊥O2A。
图1外槽轮机构ω2ω1o1 o2锁止弧槽轮拨盘圆销组成:带圆销的拨盘、带有径向槽的槽轮。
拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘上的凸圆弧,起锁定作用。
工作过程:拨盘连续回转,当两锁止弧接触时,槽轮静止;反之槽轮运动。
作用:将连续回转变换为间歇转动。
特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地进行转位。
因槽轮运动过程中角速度有变化,不适合高速运动场合。
2.槽轮机构优点(1)结构简单,工作可靠,效率较高;(2)在进入和脱离啮合时运动较平稳,能准确控制转动的角度;(3)转位迅速,从动件能在较短的时间内转过较大的角度;(4)槽轮转位时间与静止时间之比为定值。
3.槽轮机构缺点(1)槽轮的转角大小不能调节;(2)槽轮转动的始、末位置加速度变化较大,从而产生冲击:(3)在工作盘定位精度要求较高时,利用锁紧弧面往往满足不了要求,而需另加定位装置。
(4)槽轮的制造与装配精度要求较高。
由于这些原因,槽轮机构一般应用在转速不高的装置中。

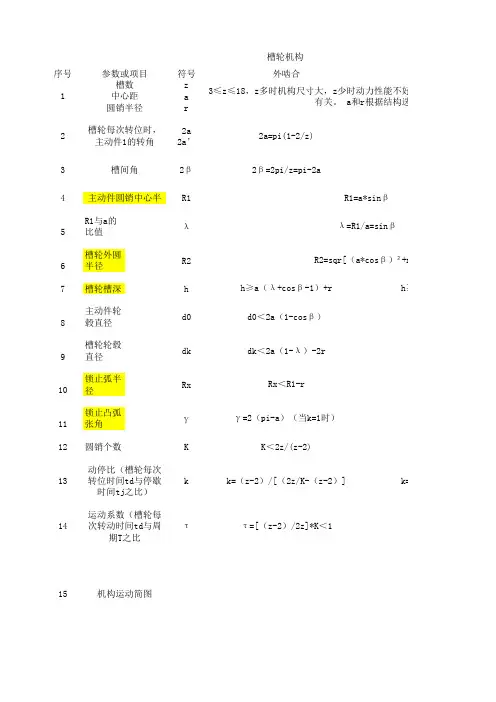
序号符号z a r 2a 2a’4R15R1与a的比值λ6槽轮外圆半径R27槽轮槽深h 8主动件轮毂直径d09槽轮轮毂直径dk 10锁止弧半径Rx 11锁止凸弧张角γ12圆销个数K 173********槽轮的角速度ω2ω2=d φ1/(dt)=[(λ²+λcos φ1)/(1+λ²+2λcos φ1)]*ω槽轮机构3≤z≤18,z多时机构尺寸大,z少时动力性能不好。
有关。
a和r根据结构选定2a=pi(1-2/z)参数或项目外啮合槽数12槽间角2β2β=2pi/z=pi-2a 2β=2pi/z=2a’-pi 中心距圆销半径槽轮每次转位时,主动件1的转角主动件圆销中心半径R1=a*sin βλ=R1/a=sin βR2=sqr[(a*cos β)²+r²]h≥a(λ+cos β-1)+r h≥a λ-cos β+1)+r d0<2a(1-cos β)dk<2a(1-λ)-2r Rx<R1-r 动停比(槽轮每次转位时间td与停歇时间tj之比)k k=(z-2)/[(2z/K-(z-2)]γ=2(pi-a)(当k=1时)γ=2(pi-a’)K<2z/(z-2)k=(槽轮的角位移φ2φ2=arctan((λsin φ1/(1+λcos φ1))外啮合φ1∈[pi-a,pi+a]内啮合φ1∈[-a',a']运动系数(槽轮每次转动时间td与周期T之比ττ=[(z-2)/2z]*K<1τ=(z+2)/2z<1机构运动简图17 1819 201=φ1'=0ω2max=[λ/(1+λ)]ω1φ1=φ1''=±arccos(1+λ²)/4λ-{sqrt[(1+λ²)/4λ]²+2}φ1=φ1''=±a'槽轮的角速度ω2ω2=dφ1/(dt)=[(λ²+λcosφ1)/(1+λ²+2λcosφ1)]*ω槽轮的角加速度ε2ε2=dω1/(dt)={[λ(λ²-1)sinφ1]/(1+λ²+2λcosφ1)²}*ωω2max及对应的φ1角φ1’对应的ε2max的φ1角φ1’'φ1=φ1'=piω2max=[λ/(1-λ)]ω1外啮合内啮合8410012557.538.2683488.388350.3826830.70710792.5231588.7059735.6563132.515.22409113.463333.2683495.88835225902.66666711459030.60.6250.75φ1)/(1+λ²+2λcosφ1)]*ω1计算值不好。