凸轮机构的弹性动力学汇编
- 格式:doc
- 大小:133.56 KB
- 文档页数:8

超越高度温馨提醒:可以使用word查找功能快速查找对应题目和答案。
查找快捷键:Ctrl+F每题2 分,共22 分。
判断下列所述是否正确,正确填入“√ ”号,错误则填“×”号。
)1 .机构都是可动的。
( √ )2 .在两个力作用下处于平衡状态的构件称为二力构件。
( √ )3 .力偶无合力。
( √ )4 .铰链四杆机构都有摇杆这个构件。
( × )5.在曲柄摇杆机构中,摇杆的回程速度一定比工作行程的速度要慢。
( × ) 6.如图所示为低碳钢拉伸时的应力-应变曲线,其中OB 称为弹性阶段,CD段称为强化阶段。
( √ )7.一个渐开线圆柱外啮合齿轮,当基圆大于齿根圆时,基圆以内部分的齿廓曲线,都不是渐开线。
( √ )8.若齿轮连续传动,其重合度要大于或等于1 。
( √ )9 .蜗杆传动一般用于传动大功率、大速比的场合。
( × )10 .带传动中打滑现象是不可避免的。
( × )11.套筒联轴器结构简单,径向尺寸小,且拆装时轴无需作轴向移动,所以使用非常广泛。
( × )每题3 分,共30 分)1.力F使物体绕点O转动的效果,取决于_______ 。
( C )A.力F的大小和力F使物体绕O点转动的方向B.力臂d的长短和力F使物体绕O点转动的方向C.力与力臂乘积F·d的大小和力F使物体绕O点转动的方向D.力与力臂乘积Fd的大小,与转动方向无关。
2.如下图所示,图中A 点处形成的转动副数为_______个。
( C )A .1B .2C .3D .43.对于铰链四杆机构,当满足整转副存在的条件时,若取_______为机架,将得到双摇杆机构。
( D )A.最长杆B.与最短杆相邻的构件C.最短杆D.与最短杆相对的构件4.凸轮机构从动杆的运动规律,是由凸轮的 _____所决定的。
( D ) A.压力角B.滚子C.形状D.轮廓曲线5.渐开线齿廓基圆上的压力角_______ 。

凸轮机构的弹性动力学分析(附MATLAB 代码)【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。
凸轮系统的运动及动力参数自定。
程序代码需提供电子版,并说明运行环境。
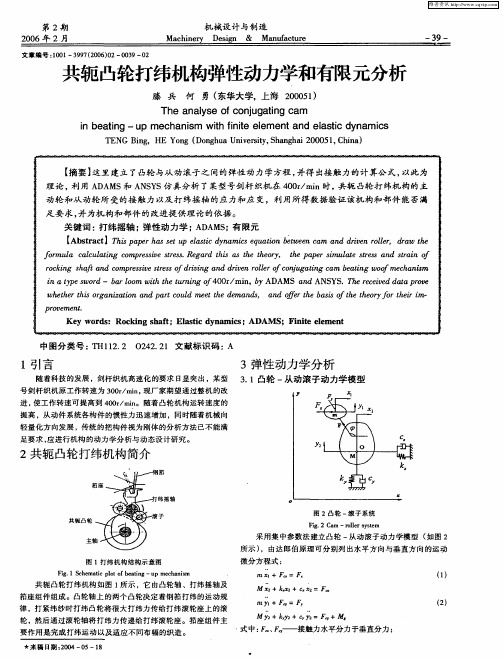
【解答】一、建立动力学模型取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。
图1:凸轮机构运动简图 图2:凸轮机构的动力学模型为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。
图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。
因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。
二、建立动力学方程该机构的自由度为1,利用牛顿第二定律建立运动微分方程:)cos 1(2ϕ-=hy 022)()(F y k dtdxdt dy c x y k dt y d M h ------= (式1)设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分ϕd 具有关系:ωϕd dt =(式2)将(式2)代入(式1)并整理可得:0222)(F kx d dx c y k k d dy c d y d M h -+=+++ϕωϕωϕω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。

凸轮机构的弹性动力学分析(附MATLAB 代码)【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。
凸轮系统的运动及动力参数自定。
程序代码需提供电子版,并说明运行环境。
【解答】一、建立动力学模型取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。
图1:凸轮机构运动简图 图2:凸轮机构的动力学模型为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。
图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。
因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。
二、建立动力学方程该机构的自由度为1,利用牛顿第二定律建立运动微分方程:)cos 1(2ϕ-=hy 022)()(F y k dtdxdt dy c x y k dt y d M h ------= (式1)设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分ϕd 具有关系:ωϕd dt =(式2)将(式2)代入(式1)并整理可得:0222)(F kx d dx c y k k d dy c d y d M h -+=+++ϕωϕωϕω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。
弹性力学在机械设计中的应用在机械的运动分析和运动设计时,通常将机械按刚性系统来分析设计,这种方法称为静态分析和静态设计,其内容属于刚性力学的范畴。
但是在实际的机械运动当中,许多机械运转速度较高、承载很大,机械的弹性变形对系统的影响不容忽视,必须将机械系统按弹性系统进行分析和设计,这就属于弹性力学范畴了。
1.弹性力学在凸轮机构设计中的应用机械中的常用凸轮机构其激振频率f 与系统最低固有频率n f 之比:nf z f =。
当z ≥0.1时,称为高速凸轮机构,其动态位移误差随z 值的增大而急剧增大,必须按弹性系统处理。
其分析和设计如下:(1)弹性动力学模型的建立。
为了简化设计,通常将构件的连续分布质量看作无质量的弹簧来表示构件的弹性,用无质量、无弹性的阻尼元件表示系统的阻尼,并忽略一些次要的影响因素,从而把凸轮机构简化成由若干无弹性的集中质量和无质量的弹簧以及阻尼元件组成的弹性系统。
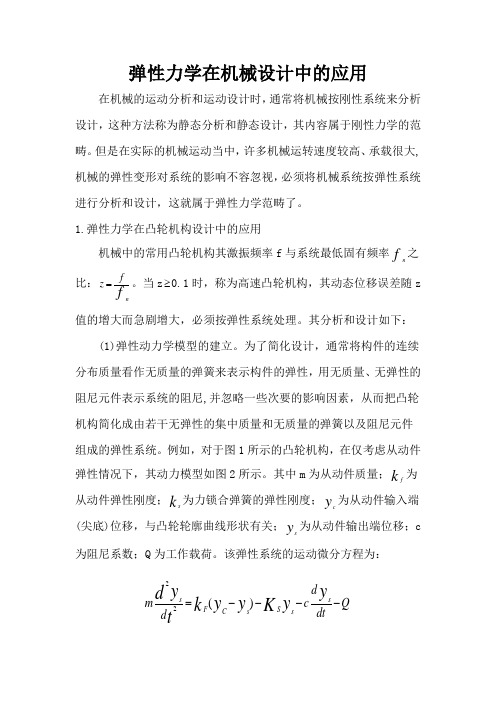
例如,对于图1所示的凸轮机构,在仅考虑从动件弹性情况下,其动力模型如图2所示。
其中m 为从动件质量;f k 为从动件弹性刚度;s k 为力锁合弹簧的弹性刚度;c y 为从动件输入端(尖底)位移,与凸轮轮廓曲线形状有关;s y 为从动件输出端位移;c为阻尼系数;Q 为工作载荷。
该弹性系统的运动微分方程为:22()ss S F C s s d m c Q dt d y y d y y y k K t =----(2)从动件输出端真实运动规律的确定。
当已知c y (t)时,由式(a)可求得从动件输出端的真实位移规律s y (t),即从动件输出端对激振的动态位移响应。
(3)从动件输出端运动规律的选择及凸轮轮廓曲线的设计。
在设计高速凸轮机构时,为使c y (t)的一阶、二阶导数连续,以避免输入端冲击,s y (t)应满足四阶导数都连续。
当选定s y (t)后,由式(a)可求得输入端运动规律c y (t),再由此设计凸轮轮廓曲线。
2.弹性力学在齿轮机构设计中的应用齿轮机构在设计时也运用了弹性力学的知识,渐开线作为齿廓曲线存在诸多优点,但用弹性力学知识加以分析便得出它存在一些固有的缺陷,现简要说明如下:当两齿轮啮合传动时,根据弹性力学中的赫兹公式知,两齿轮在接触处的最大接触应力为δmax= 。
凸轮1.组成凸轮机构的基本构件有几个?(B )A.2个B.3个C.4个D.5个2.与平面连杆结构相比,凸轮结构的突出优点是什么?( C )A 能严格的实现给定的从动件运动规律B 以实现间歇运动C 能实现多种运动形式的变换3.凸轮轮廓与从动件之间的可动联接是什么类型的运动副?( B )A 移动副B 高副C 转动副D 可能是高副也可能是低副4.若要盘形凸轮结构的从动件在某段时间内停止不动,对应的凸轮轮廓应是什么曲线?( B )A.一段直线B.一段圆弧C.一段抛物线D.以凸轮转动中心为圆心的圆弧5.凸轮机构从动杆运动规律不变的情况下,若缩小凸轮基圆半径,则压力角( C )A.减小 B.不变 C.增大 6按从动件的运动形式分类,凸轮机构分为(移动从动件)和(摆动从动件)。
7从动件在某瞬时速度突变,其加速度及惯性力在理论上均趋于无穷大时所引起的冲击称为(刚性冲击)。
8质点在圆周上作匀速运动时,它在这个圆的直径上的投影所构成的运动成为(简谐运动)。
9在其他条件不变时,压力角越大,基圆半径越(小 )。
10平底直动从动件盘形凸轮机构,压力角始终(不变)。
11凸轮机构的组成部分及其特点?凸轮机构是由凸轮,从动件以及机架三部分组成。
推杆的特点是具有曲线轮廓或凹槽的构件。
从动件也称推杆,它的运动规律是由轮廓曲线和运动尺寸决定。
机架的特点是不参与活动构件的运动起支撑和连接作用。
12简述凸轮机构的优点和缺点?优点:1.实现各种复杂的运动要求2.结构简单,紧凑3.设计简便。
缺点:点,线易磨损,不适合告诉重载。
13凸轮结构中按从动件的形状可分为几种推杆?并且简述它们的特点?三种,分别是尖顶推杆,滚子推杆,平底推杆。
尖顶推杆:1,尖顶始终能够与凸轮轮廓保持接触,可实现复杂的运动规律2,易磨损,只宜用于轻载,低速。
滚子推杆:耐磨,承载大,较常用。
平底推杆:1,接触面易形成油膜,利于润滑常用于高速运动2配合的凸轮轮廓必须全部外凸。
凸轮机构的弹性动力学研究
杨建明
【期刊名称】《桂林电子工业学院学报》
【年(卷),期】1999(019)001
【摘要】根据凸轮机构弹性动力学研究的一般步骤,介绍了凸轮机构弹性动力学研究中所用的线性,非线性离散数学模型和连接体数学模型,以及用傅立叶变换和振型叠加法解动力方程的方法。
同时研究了凸轮机构在变速输入下的动力响应。
【总页数】5页(P75-79)
【作者】杨建明
【作者单位】桂林电子工业学院电子机械系
【正文语种】中文
【中图分类】TH132.47
【相关文献】
1.织机共轭凸轮打纬机构弹性动力学设计研究 [J], 赵杰;周国庆
2.顶置凸轮配气机构多体动力学研究 [J], 张聚涛;程友联;赵会珍
3.弹性连杆机构的运动弹性动力学研究 [J], 梅顺齐;盛启舜
4.考虑输入轴角速度波动时凸轮机构动力学研究 [J], 高江红
5.基于虚拟原型的圆柱分度凸轮机构的动力学研究 [J], 王蕾;岳晓宏;黄善刚;常宗瑜
因版权原因,仅展示原文概要,查看原文内容请购买。
凸轮机构的弹性动力学分析(附MATLAB 代码)【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。
凸轮系统的运动及动力参数自定。
程序代码需提供电子版,并说明运行环境。
【解答】一、建立动力学模型取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。
图1:凸轮机构运动简图 图2:凸轮机构的动力学模型为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。
图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。
因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。
二、建立动力学方程该机构的自由度为1,利用牛顿第二定律建立运动微分方程:)cos 1(2ϕ-=hy 022)()(F y k dtdxdt dy c x y k dt y d M h ------= (式1)设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分ϕd 具有关系:ωϕd dt =(式2)将(式2)代入(式1)并整理可得:0222)(F kx d dx c y k k d dy c d y d M h -+=+++ϕωϕωϕω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。
三、运动方程的求解 (一)凸轮轮廓的设计已知条件如下:kg M 08459.0=,凸轮的转速min /1200r n =,m s N c /7148.55⋅=,m N k h /10400=,m N k /3194800=,N F 4000=;为避免余弦加速度运动产生的冲击,取凸轮的推程运动角和回程运动角均为180,远休止角和近休止角均为0,从动件的最大升程mm h 2.6=。
根据已知条件,可以确定从动件的位移方程 将上式代入(式3)可得:kx d dx c F h k k c h k k M h h h +=+++++-ϕωϕωϕω02)(21sin 2cos )]([2 (式4) 由于(式4)对应的常微分方程难以求出解析解,这里利用MATLAB 求解出其数值解并与位移方程比较如下图:若需要考虑机构的弹性变形,凸轮的轮廓应按照上图中的红色曲线进行设计。
(二)由已知廓线求解从动件的真实运动规律由于系统的弹性变形,从动件的真实运动y 与等效凸轮升程x 不再相等,当然,从动件的真实运动速度、加速度与对应的理论值也不相等。
由于弹簧的预紧力0F 为常数,它只影响系统振动的初始平衡位置,故在分析从动件的运动规律时不再考虑,从而(式1)被简化为:kx dtdxc y k k dt dy c dt yd M h +=+++)(22 (式5)根据振动理论,系统自由振动的固有频率)1(2ξω-+=Mk k hn 其中阻尼比)(2h k k M c+=ξ代入相关数值计算可得s rad n /6147=ω,0535.0=ξ如果从动件按照前述的余弦加速度规律运动,则 )cos 1(2ϕ-=hx 将上式代入(式5)可得:kx d dx c y k k d dy c d y d M h+=+++ϕωϕωϕω)(222(式6)-3凸轮的转角/rad升程/m利用MATLAB 求解(式6)的数值解,结果如下(图中的ωωnn =):从上图中的位移、速度、加速度分析看,当考虑到系统的弹性和阻尼后,工作端的运动规律发生改变,y x ≠。
只有当n 很大时,也就是说当系统的固有频率n ω很大时(刚度大),而-3凸轮的转角/rad位移/m-3凸轮的转角/rad速度/(m /s )-3凸轮的转角/rad加速度/(m /s 2)且凸轮的角速度很小时,y才接近x值。
程序附录:% filename: tulun.m% function: cooperate with jisuanlunkuo.m to calculate the curve of the camfunction dx=tulun(a,x)%% 凸轮机构的结构参数h=6.2*10^(-3); % 升程m=0.08459; % 凸轮机构的当量质量n=1200;w=n/60*2*pi; % 凸轮转速及角速度c=55.7148; % 阻尼k1=10400; % 回位弹簧刚度k=3194800; % 系统等效弹簧刚度F=400; % 回位弹簧预紧力%% 理论轮廓的微分方程dx=(h/2*(m*w^2-k-k1)*cos(a)+h/2*c*w*sin(a)+0.5*(k+k1)*h+F-k*x)/(c*w);% filename: jisuanlunkuo.m% function: cooperate with tulun.m to calculate the curve of the cam %% 计算考虑弹性变形的凸轮的理论轮廓曲线[a,x]=ode45('tulun',[0 2*pi],0);plot(a,x,'r');hold on;%% 作出未考虑弹性变形的凸轮的理论轮廓曲线a1=linspace(0,2*pi);h=6.2*10^(-3);y=h/2*(1-cos(a1));plot(a1,y,'-b');%% 添加标注grid on;legend('考虑弹性变形后凸轮的理论轮廓','未考虑弹性变形的凸轮理论轮廓');xlabel('凸轮的转角/rad');ylabel('升程/m');% filename: yundongfenxi.m% function: cooperate with fenxi.m to calculate the displacement,velocity % and acceleration of the cam mechanism when the elastic deformation of % the cam is not considered in designfunction dy=yundongfenxi(a,y)%% 凸轮机构的结构参数h=6.2*10^(-3);m=0.08459;c=55.7148;k1=10400;w=1537;% 不同情况下将凸轮的角速度值分别设为1537,2049,3074k=3194800;%% 运动分析微分方程dy=zeros(2,1);dy(1)=y(2);dy(2)=(c*w*h/2*sin(a)+k*h/2*(1-cos(a))-(k+k1)*y(1)-c*w*y(1))/(m*w*w);% filename: fenxi.m% function: cooperate with yundongfenxi.m to calculate the displacement,velocity% and acceleration of the cam mechanism when the elastic deformation of % the cam is not considered in design%% 绘制从动件的位移曲线[a,y]=ode45('yundongfenxi',[0 2*pi],[0 0]);n=length(a);figure(1);plot(a,y(:,1),'--b');% 不同情况下将线型分别设为--b,--g,--khold on;%% 绘制从动件的速度曲线figure(2);a1=zeros(n-1,1);for i=1:(n-1)a1(i)=a(i);endy1=diff(y(:,1))./diff(a);plot(a1,y1,'--b');% 不同情况下将线型分别设为--b,--g,--khold on;%% 绘制从动件的加速度曲线figure(3);a2=zeros(n-2,1);for i=2:(n-1)a2(i-1)=a1(i);endy2=diff(y1(:,1))./diff(a1);plot(a2,y2,'--b');% 不同情况下将线型分别设为--b,--g,--khold on;% fliename: zuihou.m% function: give the ideal displacement,velocity and acceleration of the % cam mechanism%% 绘制理想位移曲线a0=linspace(0,2*pi);n=length(a0);y0=3.1*10^(-3)*(1-cos(a0));figure(1);plot(a0,y0,'r');hold on;%% 绘制理想速度曲线figure(2);a01=zeros(1,n-1);for i=1:(n-1)a01(i)=a0(i);endy01=diff(y0)./diff(a0);plot(a01,y01,'r');hold on;%% 绘制理想加速度曲线figure(3);a02=zeros(1,n-2);for i=2:(n-1)a02(i-1)=a01(i);endy02=diff(y01)./diff(a01);plot(a02,y02,'r');hold on;%% 添加标注figure(1);xlabel('凸轮的转角/rad');ylabel('位移/m');legend('n=4','n=3','n=2','标准输出');figure(2);xlabel('凸轮的转角/rad');ylabel('速度/(m/s)');legend('n=4','n=3','n=2','标准输出');figure(3);xlabel('凸轮的转角/rad');ylabel('加速度/(m/s^2)');legend('n=4','n=3','n=2','标准输出');程序运行说明:在MATLAB主窗口中运行jisuanlunkuo.m文件可以得到考虑弹性变形后凸轮的理论轮廓曲线和未考虑弹性变形的凸轮理论轮廓曲线对比图;初次运行fenxi.m可以得到凸轮角速度srad/1537=ω情况下从动件的位移、速度和加速度图,之后需要按程序说明中的位置将yundongfenxi.m文件中的角速度分别改为srad/2049和srad/3074并相应地将fenxi.m文件中的线型改为--g和--k,然后再次运行fenxi.m文件可以得到srad/2049=ω以及srad/3074=ω情况下从动件的位移、速度和加速度图(每次修改后注意保存),最后运行zuihou.m文件得到最终的从动件运动量的对比分析图。