第10讲 凸轮机构动力学(2)
- 格式:pdf
- 大小:2.23 MB
- 文档页数:41
凸轮机构的弹性动力学分析(附MATLAB 代码)【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。
凸轮系统的运动及动力参数自定。
程序代码需提供电子版,并说明运行环境。
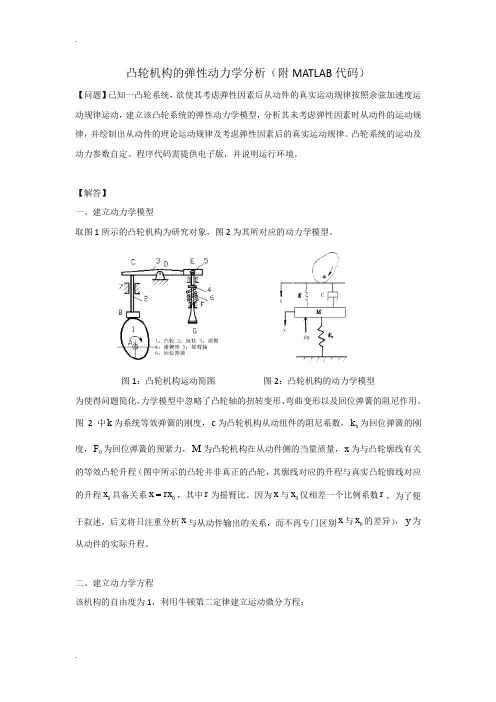
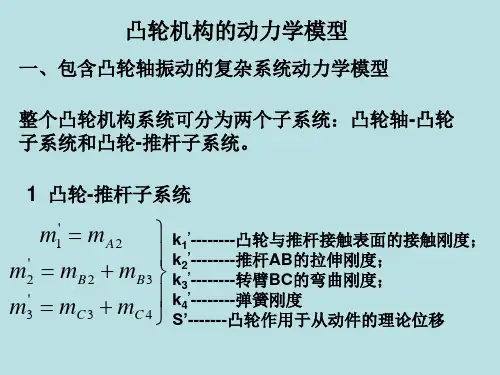
【解答】一、建立动力学模型取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。
图1:凸轮机构运动简图 图2:凸轮机构的动力学模型为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。
图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。
因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。
二、建立动力学方程该机构的自由度为1,利用牛顿第二定律建立运动微分方程:)cos 1(2ϕ-=hy 022)()(F y k dtdxdt dy c x y k dt y d M h ------= (式1)设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分ϕd 具有关系:ωϕd dt =(式2)将(式2)代入(式1)并整理可得:0222)(F kx d dx c y k k d dy c d y d M h -+=+++ϕωϕωϕω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。
凸轮机构的弹性动力学分析(附MATLAB 代码)【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。
凸轮系统的运动及动力参数自定。
程序代码需提供电子版,并说明运行环境。
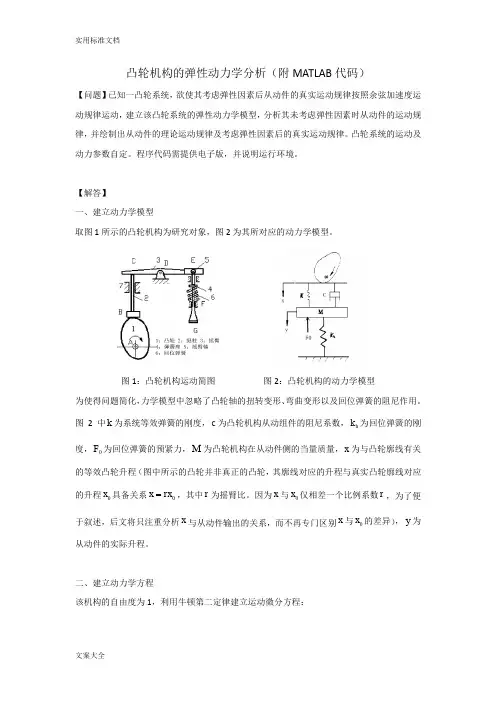
【解答】一、建立动力学模型取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。
图1:凸轮机构运动简图 图2:凸轮机构的动力学模型为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。
图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。
因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。
二、建立动力学方程该机构的自由度为1,利用牛顿第二定律建立运动微分方程:)cos 1(2ϕ-=hy 022)()(F y k dtdxdt dy c x y k dt y d M h ------= (式1)设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分ϕd 具有关系:ωϕd dt =(式2)将(式2)代入(式1)并整理可得:0222)(F kx d dx c y k k d dy c d y d M h -+=+++ϕωϕωϕω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。


凸轮机构动力学1. 简介凸轮机构(Cam Mechanism)是一种常用于将旋转运动转换为直线运动的机械装置。
它由凸轮、摇杆和传动件组成。
凸轮机构在工程领域有广泛的应用,例如发动机的气门控制系统、机床的进给机构等。
凸轮机构动力学研究凸轮机构在运动过程中各部件的相对运动关系以及各部件的运动性能。
2. 凸轮的基本概念和种类2.1 凸轮的基本概念凸轮是凸轮机构中的核心部件,位于凸轮机构的旋转部分。
它通常是一个圆柱形的轮子,具有特定的轮廓曲线。
凸轮的轮廓曲线决定了凸轮机构的运动特性。
2.2 凸轮的种类根据凸轮的轮廓曲线形状,凸轮可以分为以下几种:•圆柱凸轮:轮廓曲线为圆柱面,通常用于简单的直线运动转换。
•轴对凸轮:轮廓曲线为二次曲线,可以实现较为复杂的运动。
•非圆轮廓凸轮:轮廓曲线为非圆形,可以实现特殊形状的运动。
3. 凸轮机构的动力学分析凸轮机构的动力学分析研究凸轮机构中各部件之间的运动关系以及力学性能。
3.1 凸轮与摇杆的运动关系凸轮通过轮廓曲线与摇杆接触,从而实现运动的传递。
凸轮的运动决定了摇杆的运动轨迹。
3.2 凸轮机构的运动学方程凸轮机构的运动学方程描述了凸轮机构中各部件之间的位置和速度关系。
通过求解运动学方程,可以确定凸轮机构在运动过程中的运动状态。
3.3 凸轮机构的力学分析凸轮机构的力学分析研究凸轮机构中各部件之间的力学关系。
例如,摇杆受到凸轮的作用力,凸轮受到传动件的作用力等。
4. 凸轮机构动力学的应用4.1 发动机气门控制系统凸轮机构在发动机气门控制系统中起着重要的作用。
通过凸轮机构,发动机可以控制气门的开闭时间和行程,从而实现燃烧室内气体的进出。
凸轮机构的动力学分析可以帮助优化发动机的气门控制系统,提高燃烧效率。
4.2 机床进给机构在机床的进给机构中,凸轮机构用于控制工件在加工时的运动轨迹和速度。
凸轮机构的动力学分析可以帮助优化机床的进给机构,提高加工效率和精度。
5. 总结凸轮机构动力学是研究凸轮机构运动特性和力学性能的重要领域。
凸轮机构设计与动力学分析凸轮机构是一种重要的机械传动系统,用于将旋转运动转换成直线运动。
它是许多机械设备和工业生产线的核心部件之一,广泛应用于汽车、机器人、纺织、食品加工等领域。
本文旨在介绍凸轮机构的设计原理和动力学分析方法,为读者提供一些有关凸轮机构的基本知识和实用技巧。
一、凸轮机构的工作原理凸轮机构是由凸轮轴、凸轮和摆杆等部件组成的,其中凸轮是一个形状奇特的零件,通常由一圆柱形或锥形轴与一个凸起相连接而成。
凸轮轴和摆杆的运动轨迹是由凸轮轴的几何形状和参数决定的。
当凸轮轴旋转时,凸轮与摆杆发生相对运动,从而使摆动杆产生直线运动或允许摆动杆在取向不变的情况下旋转。
杆件的运动轨迹可以显式地表示为位置、速度和加速度方程式,这为凸轮机构的性能分析和优化提供了扎实的理论基础。
二、凸轮机构的设计方法在设计凸轮机构时,我们需要考虑以下几个因素:1. 运动要求:根据设备的需求,确定凸轮机构所需的运动类型和要求。
2. 摆杆结构:选择摆杆的长度、截面和形状,以及凸轮轴和摆动杆的垂直距离。
3. 凸轮形状:根据摆杆的运动要求和限制,选择最合适的凸轮形状。
4. 传动方式:根据凸轮机构的运动类型和要求,选择最合适的传动方式,如凸轮与摆动杆的直接接触或传动链条。
在实际设计中,我们可以采用以下方法来优化凸轮机构的性能:1. 确定凸轮形状:根据运动要求和制造成本,选择最合适的凸轮形状。
通常情况下,我们可以使用标准凸轮形状,如圆形、椭圆形和抛物线形等。
2. 调整凸轮轴位置:根据凸轮轴的位置和方向,调整凸轮的运动轨迹,以满足摆动杆的运动要求和限制。
3. 优化摆杆参数:根据摆动杆的长度、截面和形状,优化摆动杆的质量和稳定性,最大限度地提高运动精度和工作效率。
三、凸轮机构的动力学分析凸轮机构的动力学分析是评价凸轮机构运动性能的重要方法,可以预测和控制凸轮机构的位置、速度、加速度和力学性能等方面的变化。
常用的动力学分析方法包括:1. 几何法:利用几何原理和运动学方程,计算凸轮机构的位置、速度和加速度等参数。