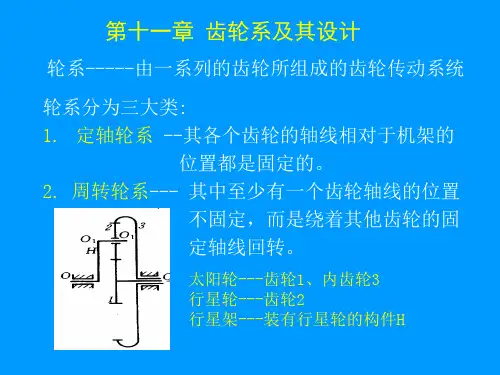
第11章 混合轮系
- 格式:pdf
- 大小:244.06 KB
- 文档页数:24
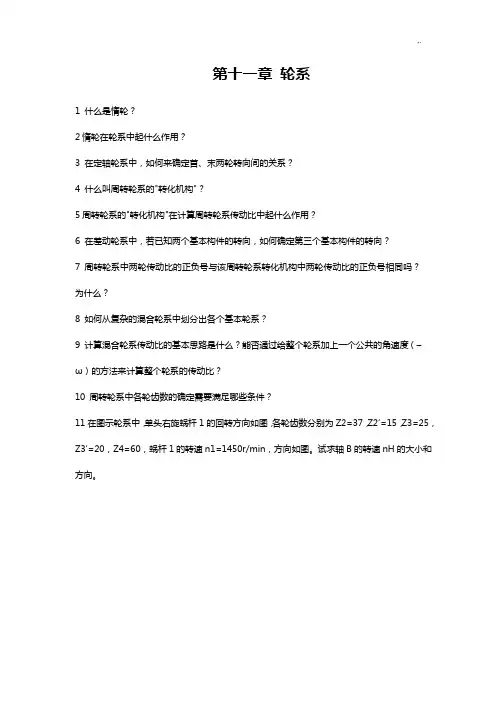
第十一章轮系1 什么是惰轮?2惰轮在轮系中起什么作用?3 在定轴轮系中,如何来确定首、末两轮转向间的关系?4 什么叫周转轮系的"转化机构"?5周转轮系的"转化机构"在计算周转轮系传动比中起什么作用?6 在差动轮系中,若已知两个基本构件的转向,如何确定第三个基本构件的转向?7周转轮系中两轮传动比的正负号与该周转轮系转化机构中两轮传动比的正负号相同吗?为什么?8 如何从复杂的混合轮系中划分出各个基本轮系?9 计算混合轮系传动比的基本思路是什么?能否通过给整个轮系加上一个公共的角速度(–ω)的方法来计算整个轮系的传动比?10 周转轮系中各轮齿数的确定需要满足哪些条件?11在图示轮系中,单头右旋蜗杆1的回转方向如图,各轮齿数分别为Z2=37,Z2′=15,Z3=25,Z3′=20,Z4=60,蜗杆1的转速n1=1450r/min,方向如图。
试求轴B的转速nH的大小和方向。
12 在图示轮系中,已知:各轮齿数为Z1= Z3= Z4′=15,Z2=60,Z4= Z5=30,试求传动比i15:13 已知图示轮系中各轮的齿数:Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min14在图(7)所示的轮系中,已知Z1=20,Z2=40,Z2′=30,Z3=100 ,Z4=90,求i14的大小15 在图(8)所示的轮系中,已知Z1=Z4′=40, ,Z1′=Z2= Z4=20, ,Z2′=30, Z3=30,Z3′=15,试求: i1H16 图示(10)的轮系中,已知各齿轮齿数Z1=20,Z2=30,Z3=80,Z4=40,Z5=20,轮1的转速n1=1000 r/min,方向如图,试求:轮5的转速n5的大小和方向。
17图示(16)轮系中,各齿轮为渐开线标准圆柱齿轮,作无侧隙传动,他们的模数也均相等,其转向见图,且已知齿轮1、2,及2′齿数分别为Z1=20,Z2=48,Z2′==20,求齿轮3齿数和传动比i1H。
第二章 预习思考题1、什么是运动副?运动副的作用是什么?什么是高副?什么是低副?它们的运动简图符号分别如何表达? 2、平面机构中的低副和高副各引入几个约束?3、机构具有确定相对运动时,机构自由度数和原动件数之间具有什么关系?4、什么是机构运动简图,绘制机构运动简图的基本方法是什么?5、用机构运动简图表示你家中的缝纫机的踏板机构。
6、计算平面机构自由度时,应注意哪三个问题?6、 机构具有确定运动的条件是什么?如果不能满足这一条件,将会产生什么结果? 7、 平面机构中的虚约束常出现在哪些场合? 8、怎样处理复合铰链和局部自由度? 9、机构组成原理是什么? 10、如何判定机构级别?第三章 预习思考题1、机构速度分析图解法可分为哪两种?2、什么叫瞬心?用什么符号表示?3、什么叫绝对瞬心?什么叫相对瞬心?4、什么叫三心定理?它的作用是什么?5、什么叫机构的封闭矢量方程式?6、什么叫速度影像和加速度影像原理?它的适用范围7、用相对运动图解法求加速度时,什么时候有哥氏加速度?8、速度瞬心法只适用于求什么?第八章 预习思考题第八章 预习思考题1、连杆机构的主要优缺点。
2、铰链四杆机构有哪三种基本型式?3、何谓连架杆?何谓连杆?何谓曲柄?何谓摇杆?4、何谓倒置法?试举三例说明机构的演化。
5、何谓“杆长之和条件”?机构中具有双周转副的构件是否是最短杆?6、铰链四杆机构、曲柄滑块机构中存在周转副的条件分别是什么?7、曲柄摇杆机构中,极位夹角和摆角有何区别? 8、何谓压力角?何谓传动角?何谓死点? 9、机构死点位置与极限位置有何区别? 10、如何用反转法图解综合平面四杆机构?第九章 预习思考题1.在直动从动件盘形凸轮机构中,试问同一凸轮采用不同端部形状的从动件时,其从动件运动规律是否相同?为什么?2.设计哪种类型的凸轮机构时可能出现运动失真?3.当出现运动失真时应该考虑用哪些方法消除?4.何谓凸轮机构的压力角?它在凸轮机构的设计中有何重要意义?5.直动从动件盘形凸轮机构压力角的大小与该机构的哪些因素有关?6.在直动从动件盘形凸轮机构中,若凸轮作顺时针方向转动,从动件向上移动为工作行程,则凸轮的轴心应相对从动件导路向左偏置还是向右偏置为好?为什么?7.若从动件导路偏置得太多会有什么问题产生? 8.当设计直动从动件盘形凸轮机构的凸轮廓线时,若机构的最大压力角超过了许用值,试问可采用哪几种措施来减小最大压力角或增大许用压力角? 9.在图示直动尖顶从动件盘形凸轮机构中,凸轮转向如图所示,说明从动件相对凸轮轴心的配置是否合理,为什么?10.有一对心直动尖顶从动件盘形凸轮机构,为改善从动件尖端的磨损情况,将其尖端改为滚子,仍使用原来的凸轮,这时该凸轮机构中从动件的运动规律有无变化?简述理由。

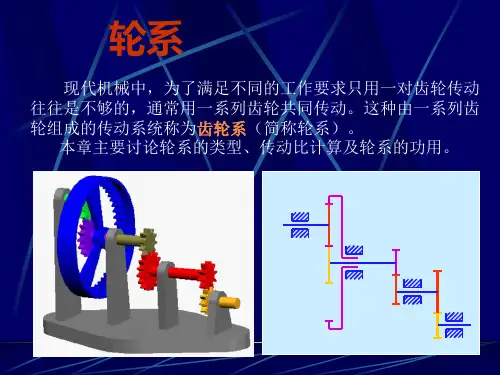
混合轮系名词解释
嘿,朋友们!今天咱来聊聊混合轮系呀!你说这混合轮系就像是一个奇妙的机械大杂烩。
想象一下,你家里的各种物件,有大有小,有圆有方,它们组合在一起能发挥出各种奇妙的作用。
混合轮系不就类似嘛!它里面既有定轴轮系的部分,又有周转轮系掺和在里头。
定轴轮系就像是家里那些稳稳当当放在那儿的家具,它们可靠又稳定。
而周转轮系呢,就好像是那些会转动的小玩具,充满了活力和变化。
这两者一结合,哇塞,那可真是不得了!
混合轮系能实现好多复杂的传动比呢!就好像你要完成一个超级复杂的任务,光靠一种方法可不行,得多种手段一起上。
它可以让机器的运转变得更加灵活多变,适应各种不同的需求。
你说这混合轮系是不是很神奇?它在各种机械设备里可发挥了大作用呢!比如那些大型的工业机器,没有混合轮系的巧妙组合,怎么能高效地工作呢?它就像是一个幕后英雄,默默地奉献着自己的力量。
咱再打个比方,混合轮系就像是一个优秀的团队。
团队里有各种不同性格、不同能力的人,大家齐心协力,才能把事情干好。
定轴轮系就像是踏实肯干的成员,而周转轮系就像是充满创意的那部分人,他们在一起,就能创造出惊人的成果。
你看那些汽车、机床啥的,里面都有混合轮系的功劳呀!没有它,这些东西能这么好用吗?混合轮系让一切变得有可能,让机械的世界更加丰富多彩。
总之,混合轮系可不是一般的厉害,它是机械领域里的一颗璀璨明星!它让我们的生活变得更加便捷、高效,我们真得好好感谢它呢!。
西北工业大学机械原理课后答案第11章第11章课后参考答案11-1在给定轮系主动轮的转向后,可用什么方法来确定定轴轮系从动轮的转向?周转轮系中主、从动件的转向关系又用什么方法来确定?答:参考教材216~218页。
11-2如何划分一个复合轮系的定轴轮系部分和各基本周转轮系部分?在图示的轮系中,既然构件5作为行星架被划归在周转轮系部分中,在计算周转轮系部分的传动比时,是否应把齿轮5的齿数,Z5计入?答:划分一个复合轮系的定轴轮系部分和各基本周转轮系部分关键是要把其中的周转轮系部分划出来,周转轮糸的特点是具有行星轮和行星架,所以要先找到轮系中的行星轮,然后找出行星架。
每一行星架,连同行星架上的行星轮和与行星轮相啮合的太阳轮就组成一个基本周转轮糸。
在一个复合轮系中可能包括有几个基本周转轮系(一般每一个行星架就对应一个基本周转轮系),当将这些周转轮一一找出之后.剩下的便是定轴轮糸部分了。
在图示的轮系中.虽然构件5作为行星架被划归在周转轮系部分中,但在计算周转轮系部分的传动比时.不应把齿轮5的齿数计入。
11-3在计算行星轮系的传动比时,式i mH=1-i H mn只有在什么情况下才是正确的? 答在行星轮系,设固定轮为n, 即ωn=0时, i mH=1-i H mn公式才是正确的。
11-4在计算周转轮系的传动比时,式i H mn=(n m-n H)/(n n-n H)中的i H mn是什么传动比,如何确定其大小和“±”号?答: i H mn是在根据相对运动原理,设给原周转轮系加上一个公共角速度“-ωH”。
使之绕行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度为0,即行星架“静止不动”了.于是周转轮系转化成了定轴轮系,这个转化轮系的传动比,其大小可以用i H mn=(n m-n H)/(n n-n H)中的i H mn公式计算;方向由“±”号确定,但注意,它由在转化轮系中m. n两轮的转向关系来确定。
华东理工大学网络教育学院机械原理课程阶段练习四(第8章—第10章—第11章)第八章 齿轮系及其设计一、填空题1、周转轮系根据自由度不同可分为 差动轮系 和 行星轮系 ,其自由度分别为 2 和 1 。
2、组成周转轮系的基本构件有: 太阳轮 ; 行星轮 , 系杆 。
3、K i 1与H K i 1不同,K i 1是 构件1和K 的传动比 ;HK i 1是 构件1和K 相对系杆H 的传动比 。
二、简答题1、什么是复合轮系?写出计算复合轮系传动比的步骤。
复合轮系:由定轴轮系和周转轮系或者由两个以上的周转轮系组成的轮系。
步骤:(1)划清组成复合轮系中的定轴轮系和周转轮系;(2)分别采用定轴轮系和周转轮系传动比的计算公式列出计算方程式; (3)根据这些轮系的组合方式联立解出所求的传动比。
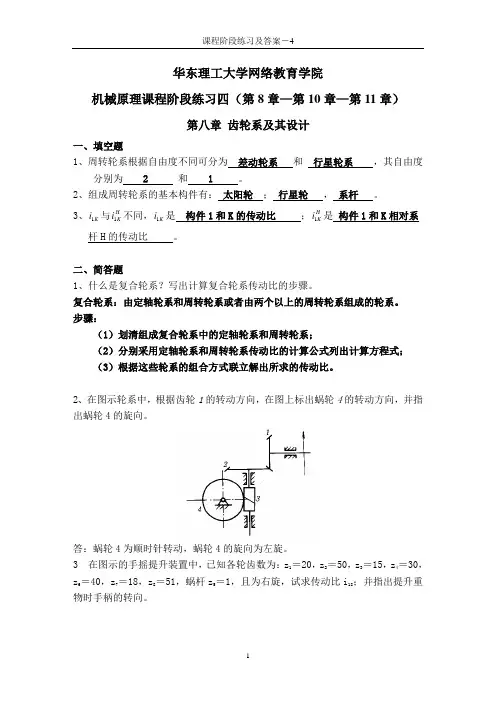
2、在图示轮系中,根据齿轮1的转动方向,在图上标出蜗轮4的转动方向,并指出蜗轮4的旋向。
答:蜗轮4为顺时针转动,蜗轮4的旋向为左旋。
3 在图示的手摇提升装置中,已知各轮齿数为:z 1=20,z 2=50,z 3=15,z 4=30,z 6=40,z 7=18,z 8=51,蜗杆z 5=1,且为右旋,试求传动比i 18;并指出提升重物时手柄的转向。
答:所示轮系为定轴轮系;各轮转向为:8-逆时针、7-顺时针、4-箭头向左、3-箭头向上、2-箭头向上、1-箭头向上;传动比:67.56618=i4 在图示的蜗杆传动中,试分别在左右两图上标出蜗杆1的旋向和转向。
答:左图为右旋蜗杆;右图蜗杆逆时针转动。
三 计算题1 在图示的轮系中,已知z 1=20,z 2=30,z 3=18,z 6=48,齿轮1的转速n 1=150 r/min ,试求系杆 H 的转速n H 的大小和方向。
1.667.534124114-=⨯-=--=Z Z Z Z i H H Hωωωω因为:04=ω所以:667.511+=Hωω m in/5.22r H =ω2、在图中,已知:Z 1=20 ,Z 2=30 ,Z 2’=25,Z 3=75,Z 4=30,Z5=25,。
第一章测试1.机械常用机构有A:连杆机构B:涡轮机构C:凸轮机构D:齿轮机构答案:ACD2.机器动力学是分析机器在运转过程中其各构件的受力情况,以及这些力的作功情况A:错B:对答案:B3.机器是一种执行机械运动的装置,可用来变换和传递()A:运动B:物料C:能量D:信息答案:BCD4.机械是()和机器的总称A:构件B:机构C:零件答案:B5.机构是指一种用来传递与变换运动和力的可动装置A:对B:错答案:A第二章测试1.两构件组成运动副的必备条件是A:不接触也无相对运动B:直接接触且具有相对运动C:不接触但有相对运动D:直接接触但无相对运动答案:B2.当机构的原动件数目小于或大于其自由度数时,该机构将_ 确定的运动。
A:可能有B:有C:没有D:不一定答案:C3.用一个平面低副联二个做平面运动的构件所形成的运动链共有___个自由度。
A:6B:5C:3D:4答案:D4.杆组是自由度等于_ 的运动链。
A:2B:1C:0D:原动件数答案:C5.平面运动副所提供的约束为A:1或2B:2C:1D:3答案:A第三章测试1.下列说法正确的是A:两构件构成高副,则它们的瞬心一定在接触点上B:在机构中,若某一瞬时,两可动构件上重合点的速度相同,则该点称为它们的绝对瞬心C:在机构中,若某一瞬时,一可动构件上某点的速度为零,则该点为可动构件与机架的瞬心D:在机构中,若某一瞬时,两构件上的重合点的速度大小相等,则该点为两构件瞬心答案:C2.瞬心是作平面运动的两构件上瞬时相对速度为零的重合点,也就是绝对速度相等的点。
A:对B:错答案:A3.作平面运动的三个构件之间共有三个速度瞬心,它们不一定位于同一直线上。
A:错B:对答案:A4.在平面机构中,有n个活动构件,则该机构的瞬心总数为n(n-1)/2A:对B:错答案:B5.速度瞬心是两刚体上相对速度为零的重合点A:对B:错答案:B第四章测试1.提高机械效率的途径有:尽量简化机械传动系统、选择合适的运动副形式、尽量减少构件尺寸、减少摩擦A:对B:错答案:A2.平面摩擦的总反力方向恒与运动方向成钝角A:错B:对答案:B3.在机械运动中总是有摩擦力存在。